
Robust Optimization of a MEMS Accelerometer Considering Temperature Variations

Abstract
:1. Introduction
2. The Accelerometer
2.1. Operating Principle

2.2. Calculation of the Output of Detection Capacitance
3. Effects of Temperature Variations on the Accelerometer
3.1. The Material Properties
3.2. Resonance Frequency

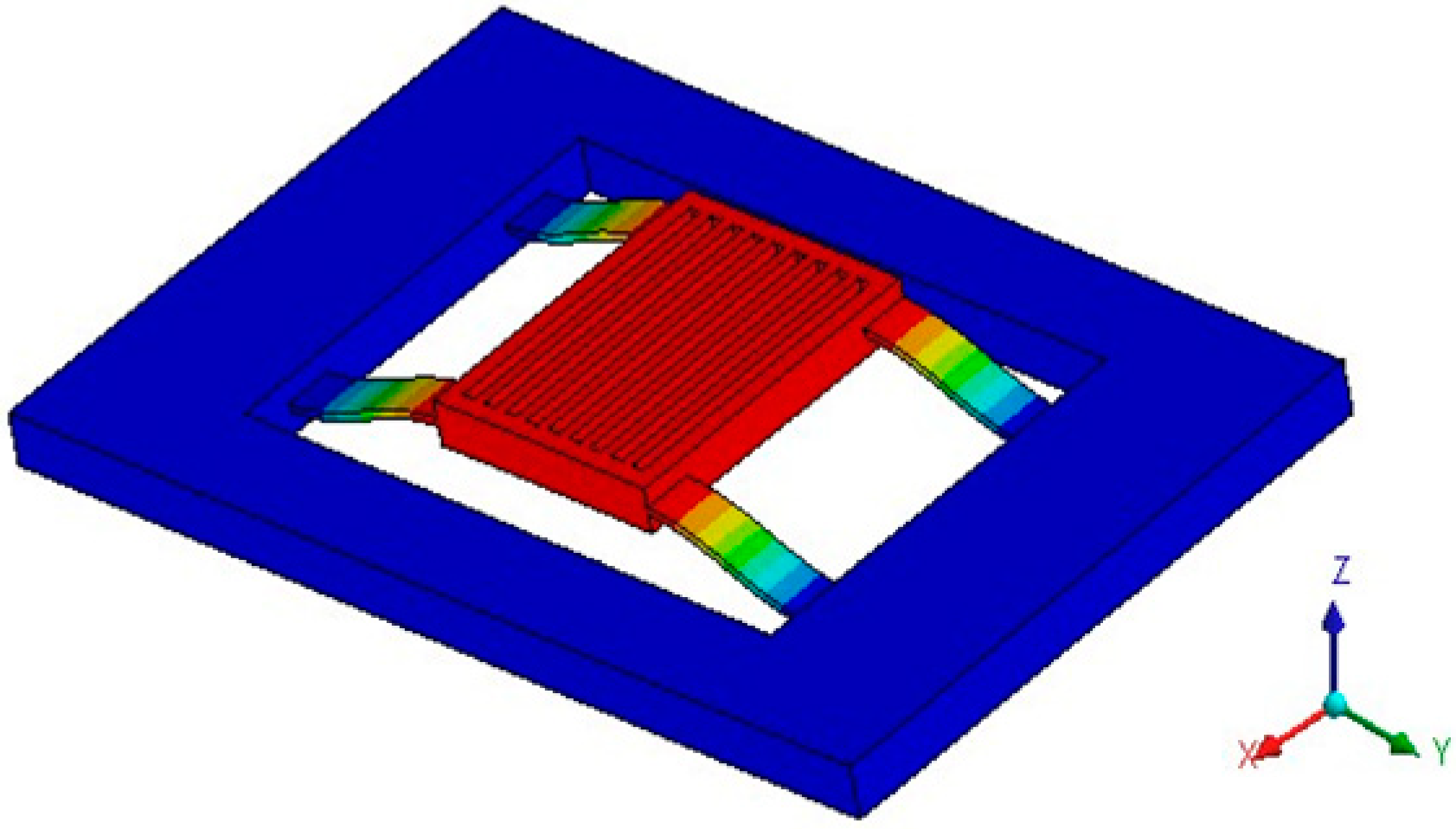
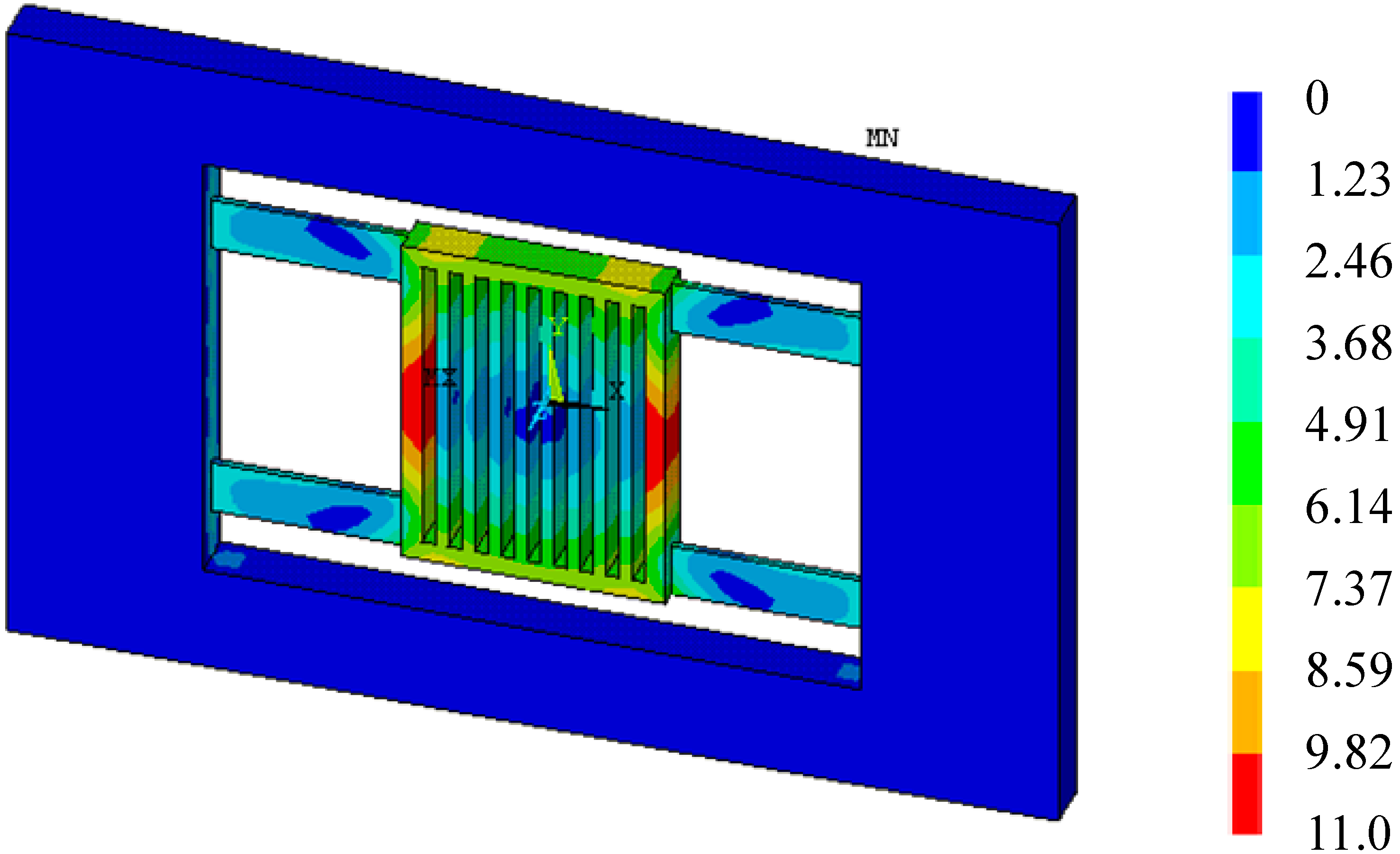
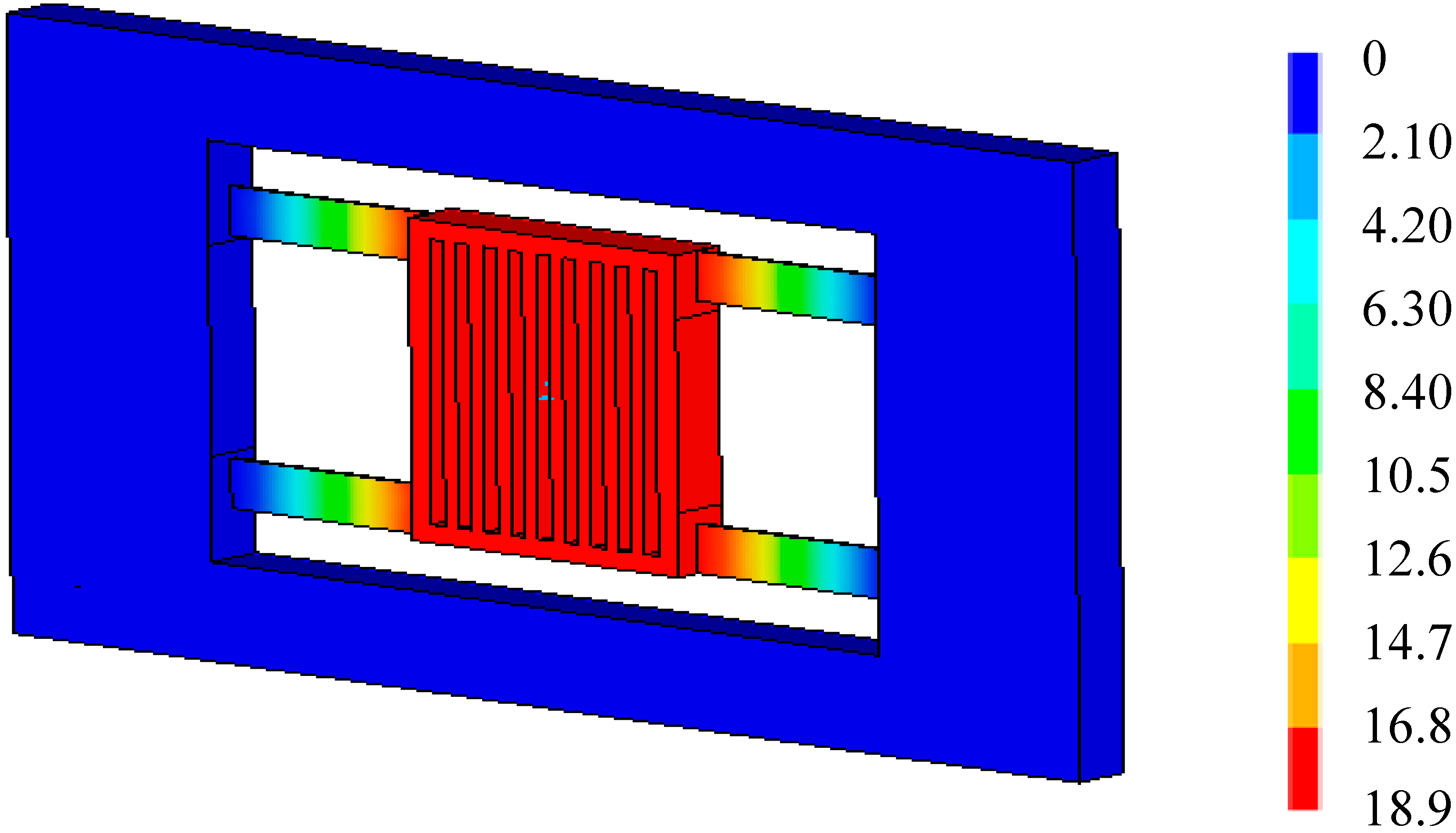
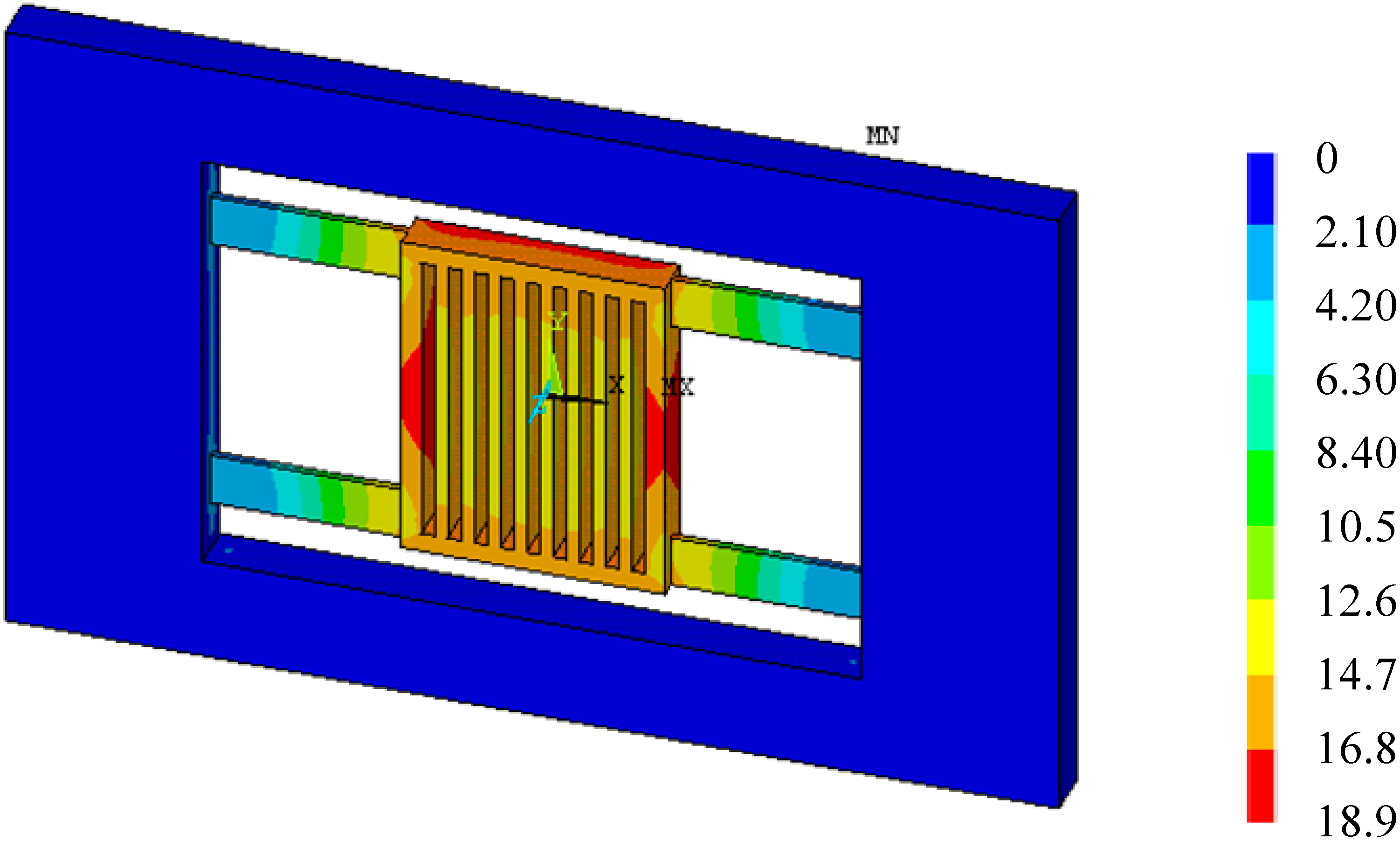
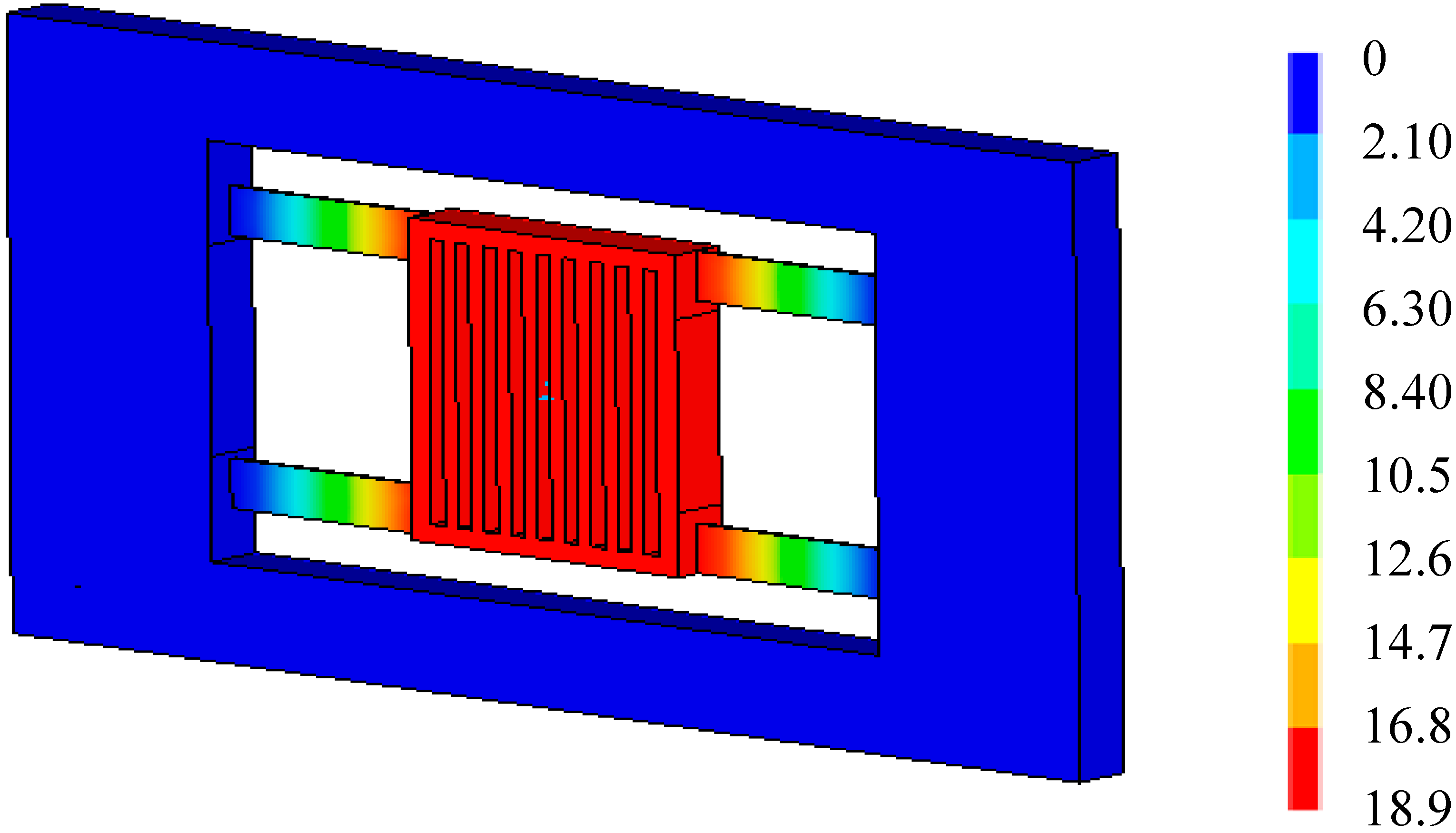
3.3. Thermal Deformation
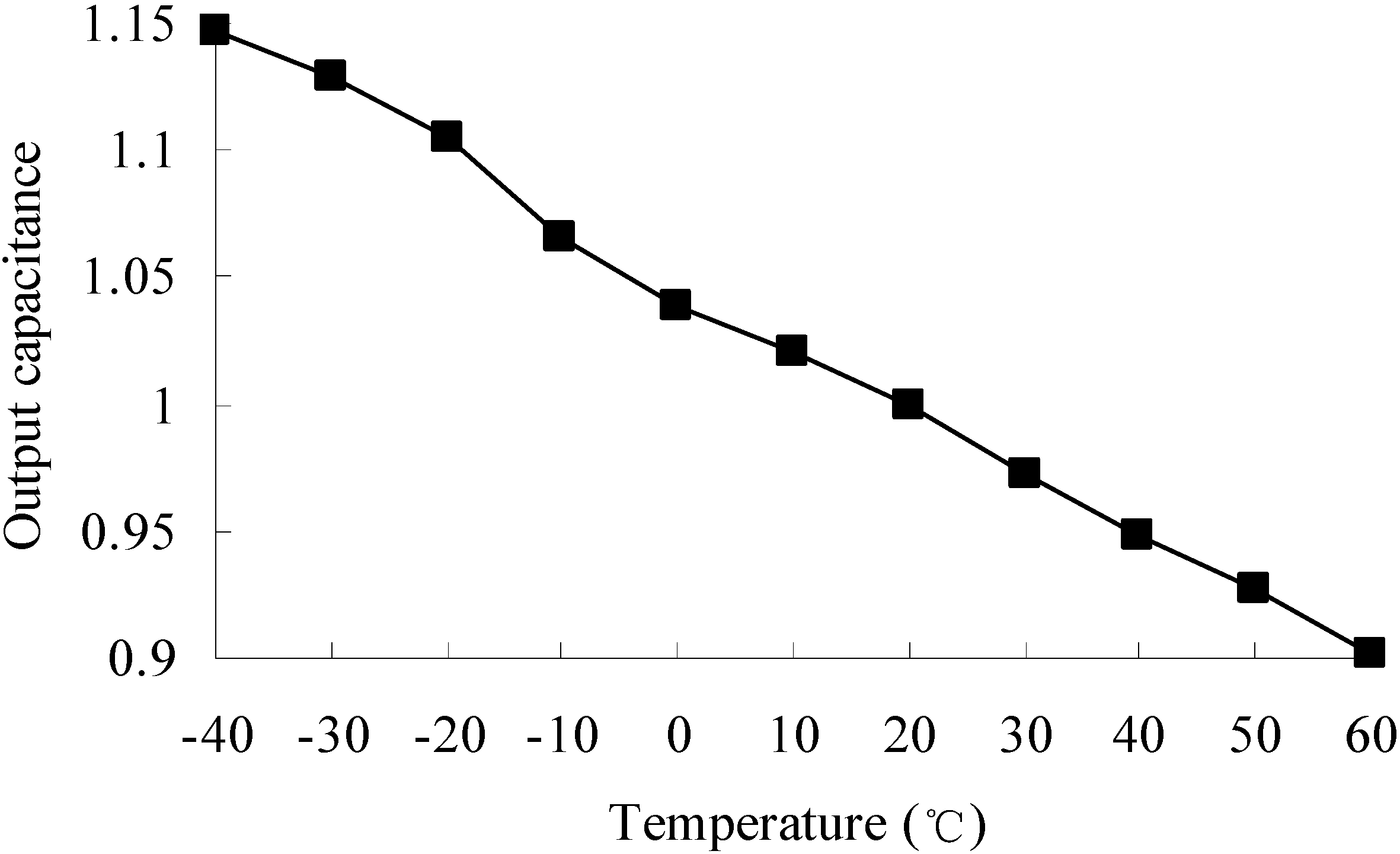
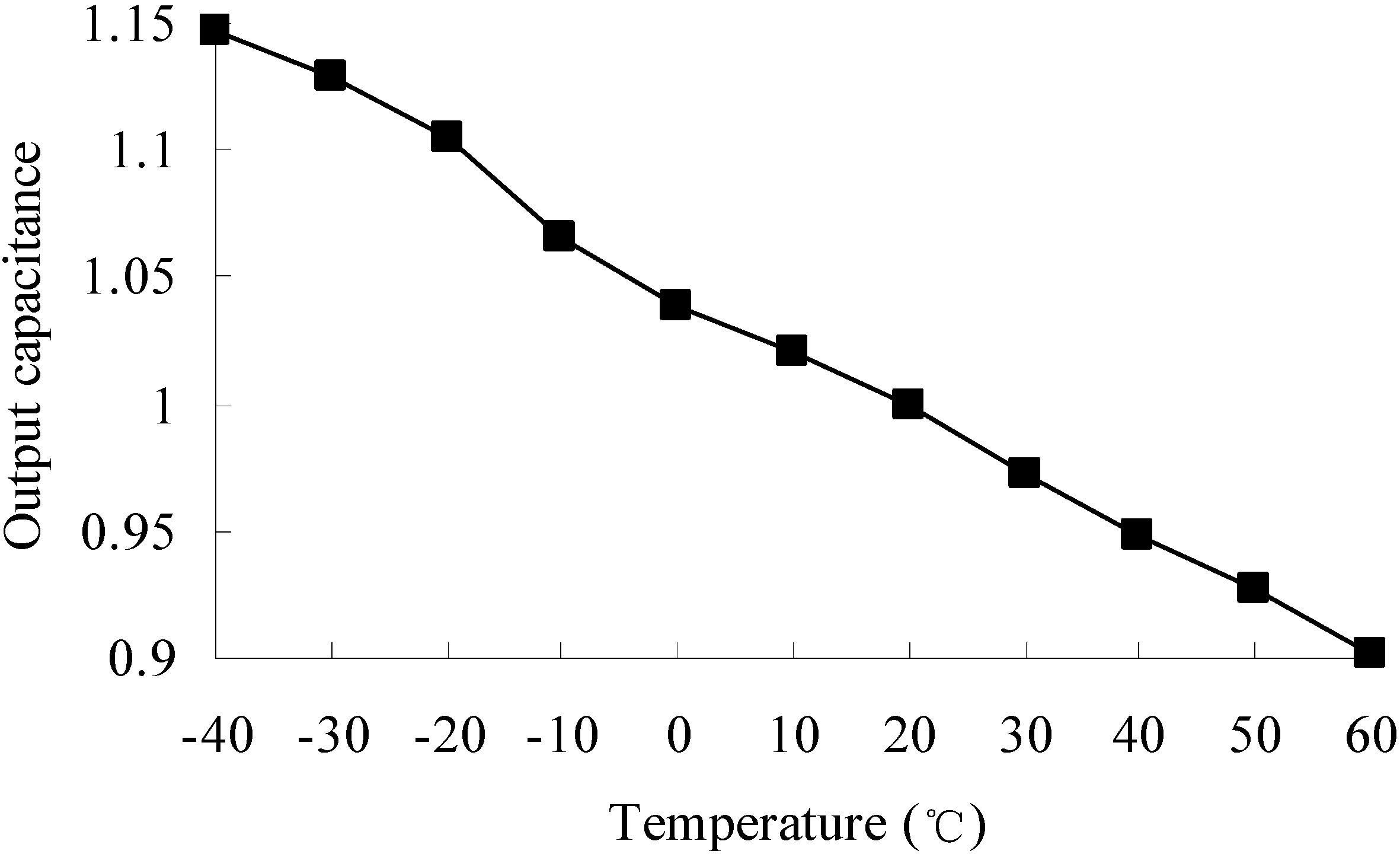
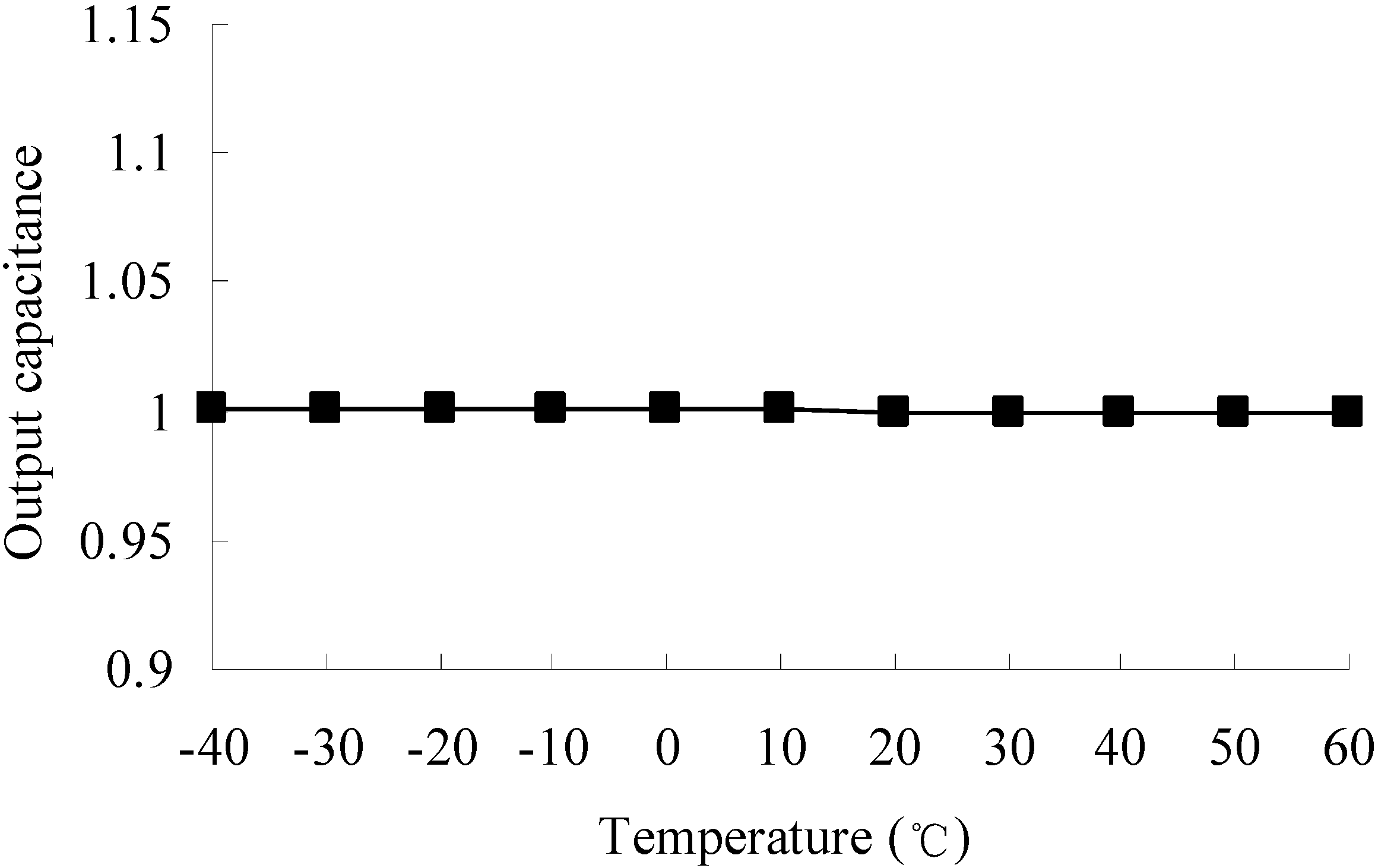
3.4. Output Capacitance
4. Sensitivity Analysis of Output Capacitance and Resonance Frequency
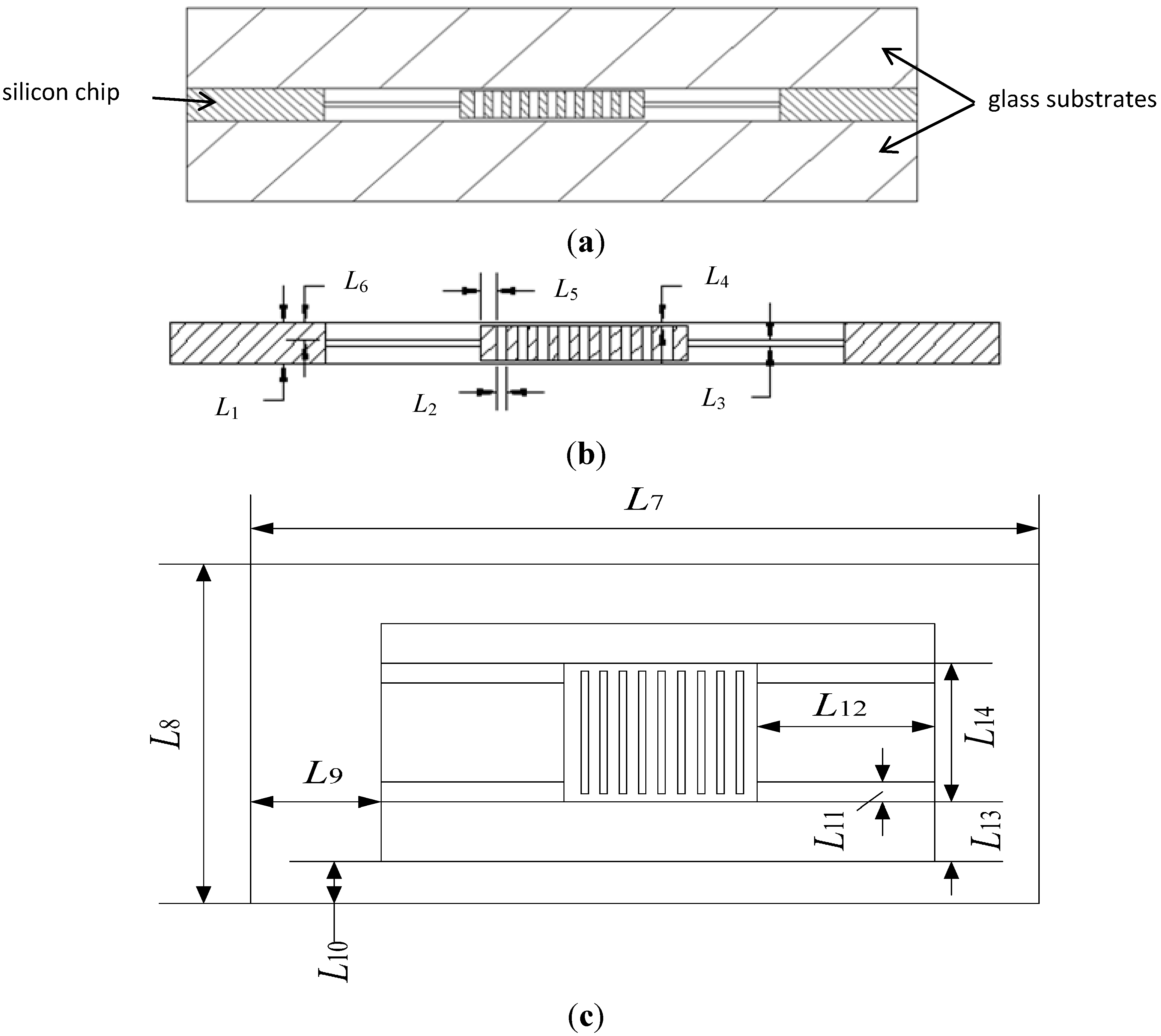
4.1. Sensitivity Analysis of Output Capacitance and Resonance Frequency to Structural Parameters
- (1)
- Calculate the output capacitance of the initial structure;
- (2)
- Change one of the structural parameters with ( ), and keep other parameters unchanged;
- (3)
- Calculate the sensitivity of the output capacitance to the parameter according to Equation (8);
- (4)
- Find out the key parameters that have greatest influence on the output capacitance.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Computational conditions | Value |
|---|---|
| Initial nodal displacements | 0 |
| Initial nodal velocities | 0 |
| Acceleration | 50 m/s2 |
| Young’s modulus | 1.7×105 MPa |
| Poisson’s ratio | 0.3 |
| Density | 2330 kg/m3 |
| Temperature | 20 °C |
4.2. Results of Sensitivity Analysis
| Parameter | L1 | L2 | L3 | L4 | L5 | L6 | L6 |
|---|---|---|---|---|---|---|---|
| Sc (%) | 1.294 | 1.705 | 3.197 | 1.159 | 3.076 | 2.118 | 9.276 |
| SN (%) | 2.011 | 1.977 | 2.859 | 2.898 | 0.975 | 1.290 | 4.612 |
| Parameter | L8 | L9 | L10 | L11 | L12 | L13 | L14 |
| Sc (%) | 14.477 | 3.804 | 4.584 | 4.419 | 4.162 | 2.367 | 1.098 |
| SN (%) | 11.401 | 3.172 | 3.913 | 3.121 | 4.166 | 2.339 | 1.901 |
- (1)
- The six parameters that have greater influence on the output capacitance include the five parameters that have greater influence on the 1st resonance frequency, which shows a relationship between the resonance frequency and output capacitance. This can be explained by Equation (5).
- (2)
- The length and width of the accelerometer have the greatest influence on the performance.
- (3)
- The structural parameters related to proof mass also have significant influence on the performance.
- (4)
- The length of the suspension beams determines the stiffness of the beams, so it will influence the output capacitance and resonance frequency. However, the width and height of the suspension beams have a relative smaller influence on the performance of the accelerometer.
- (5)
- It is recommend to keep more attention on , , , , and in fabrication process, as they have more influence on the performance of the accelerometer.
5. Robust Optimization of the Accelerometer
5.1. Design Variables
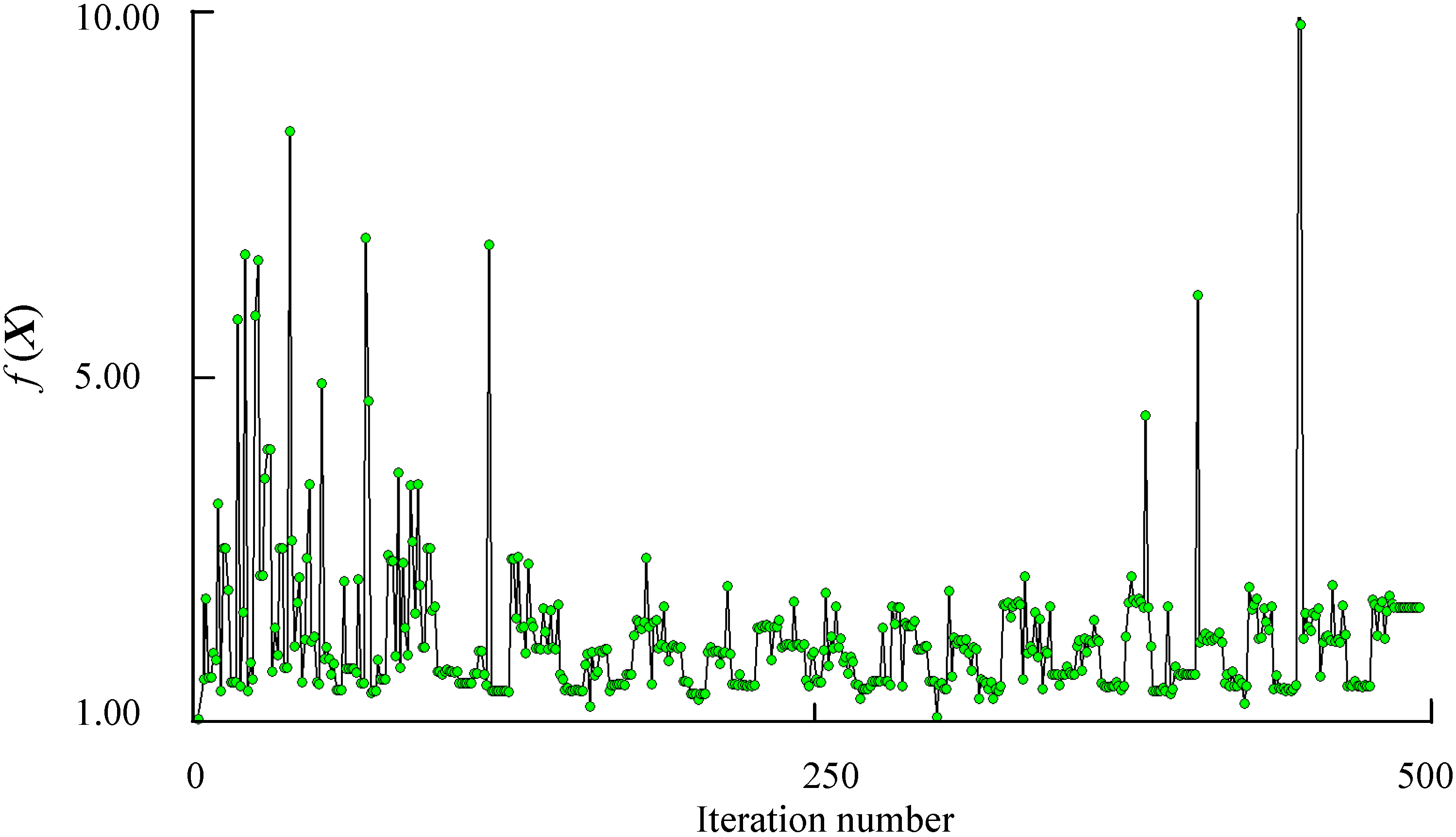
5.2. Objective Functions
5.3. Constraints Conditions
5.3.1. Geometrical Constraints
5.3.2. Vibration Modes Constraints
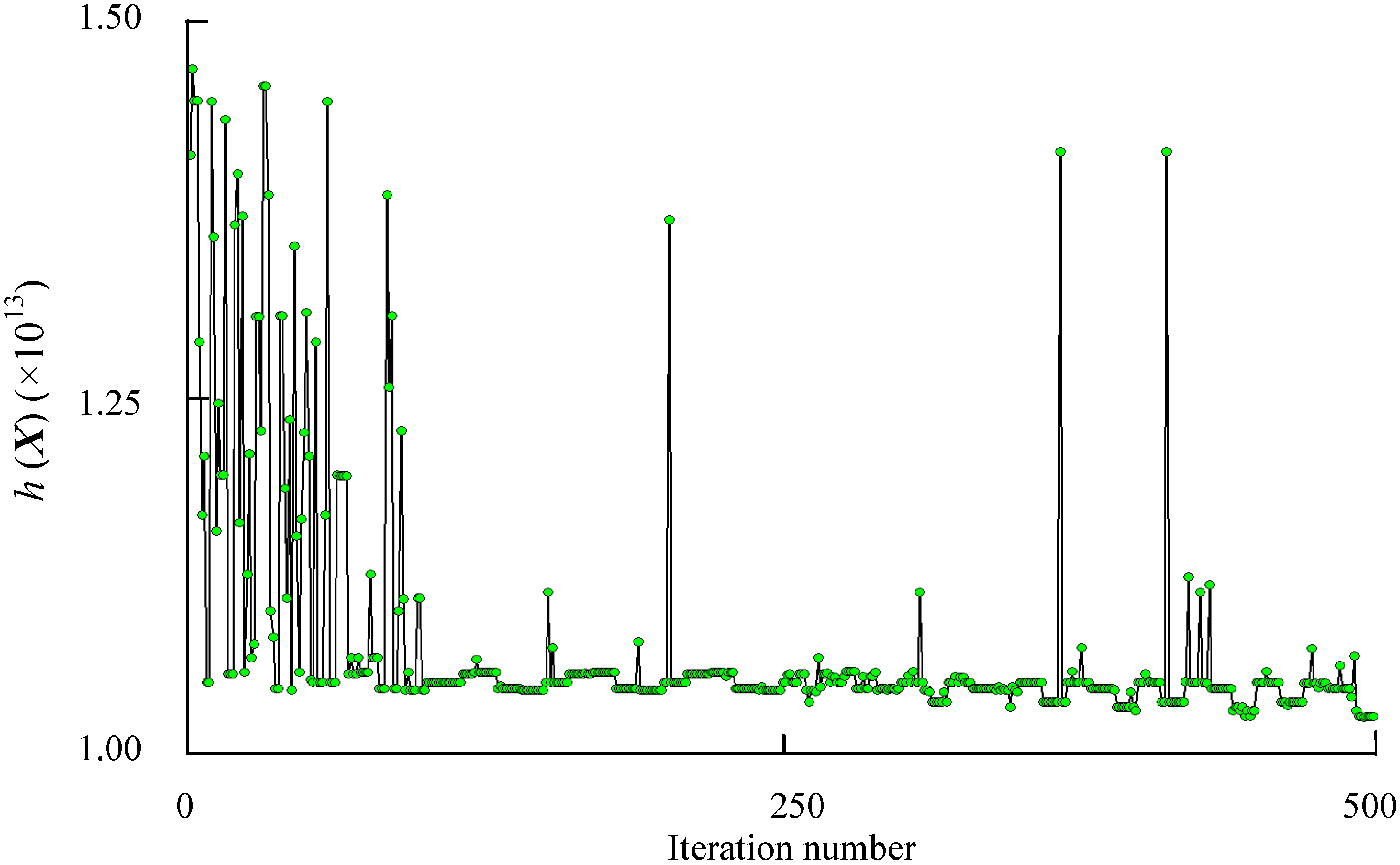
5.3.3. Robustness Constraints
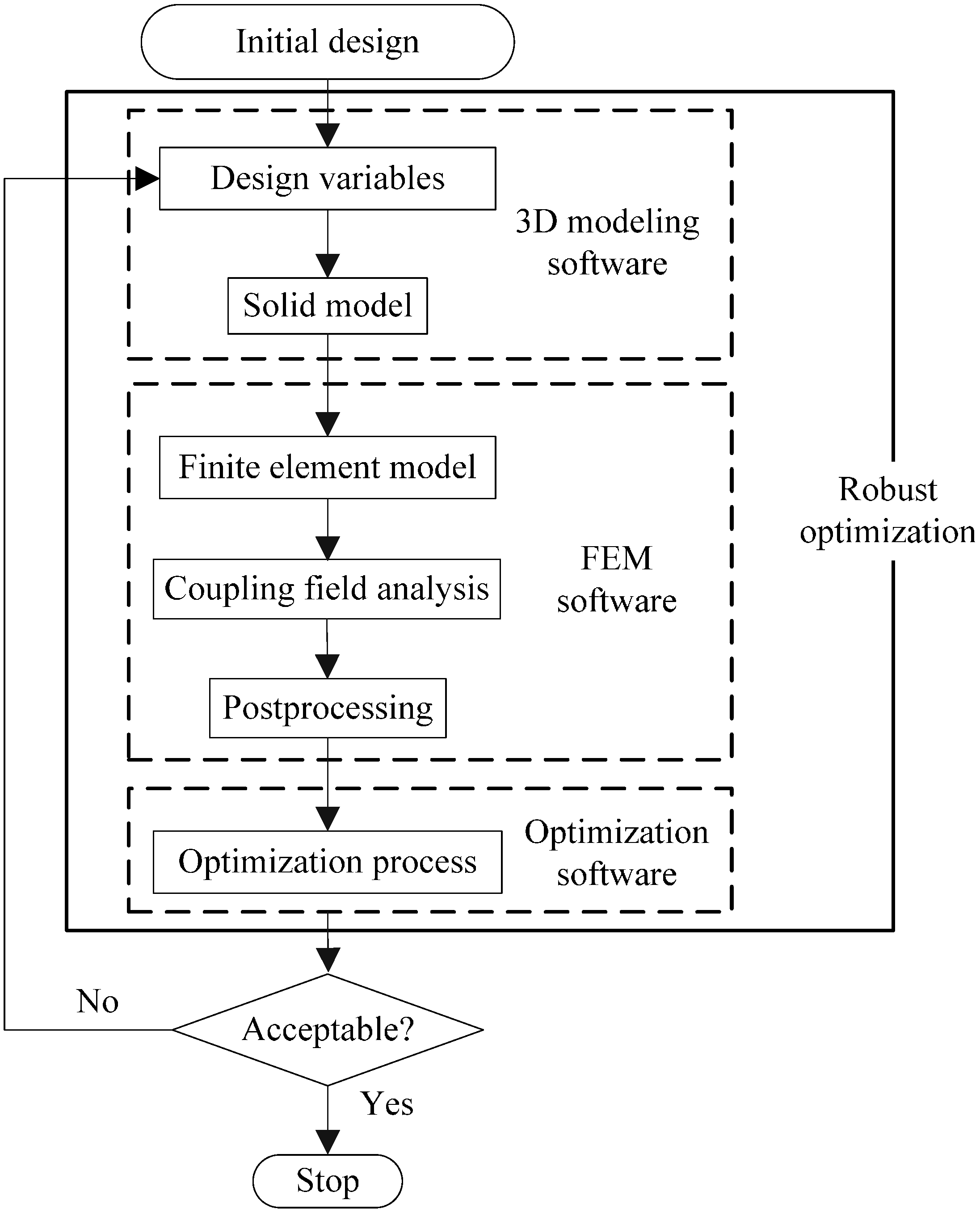
5.4. Procedure of Robust Optimization
- (1)
- Determine design variables according to the results of sensitivity analysis;
- (2)
- Build the solid model of the accelerometer using a 3D modeling software;
- (3)
- Input the solid model into a FEM software, then mesh it;
- (4)
- Apply constraints and loads to the FEM model, and perform FEA;
- (5)
- Calculate output capacitance;
- (6)
- Perform optimization and update design variables;
- (7)
- Check and evaluate the convergence criterion. If the criterion is satisfied, the process is terminated. If not so, go to the Step (2) with updated design variables.
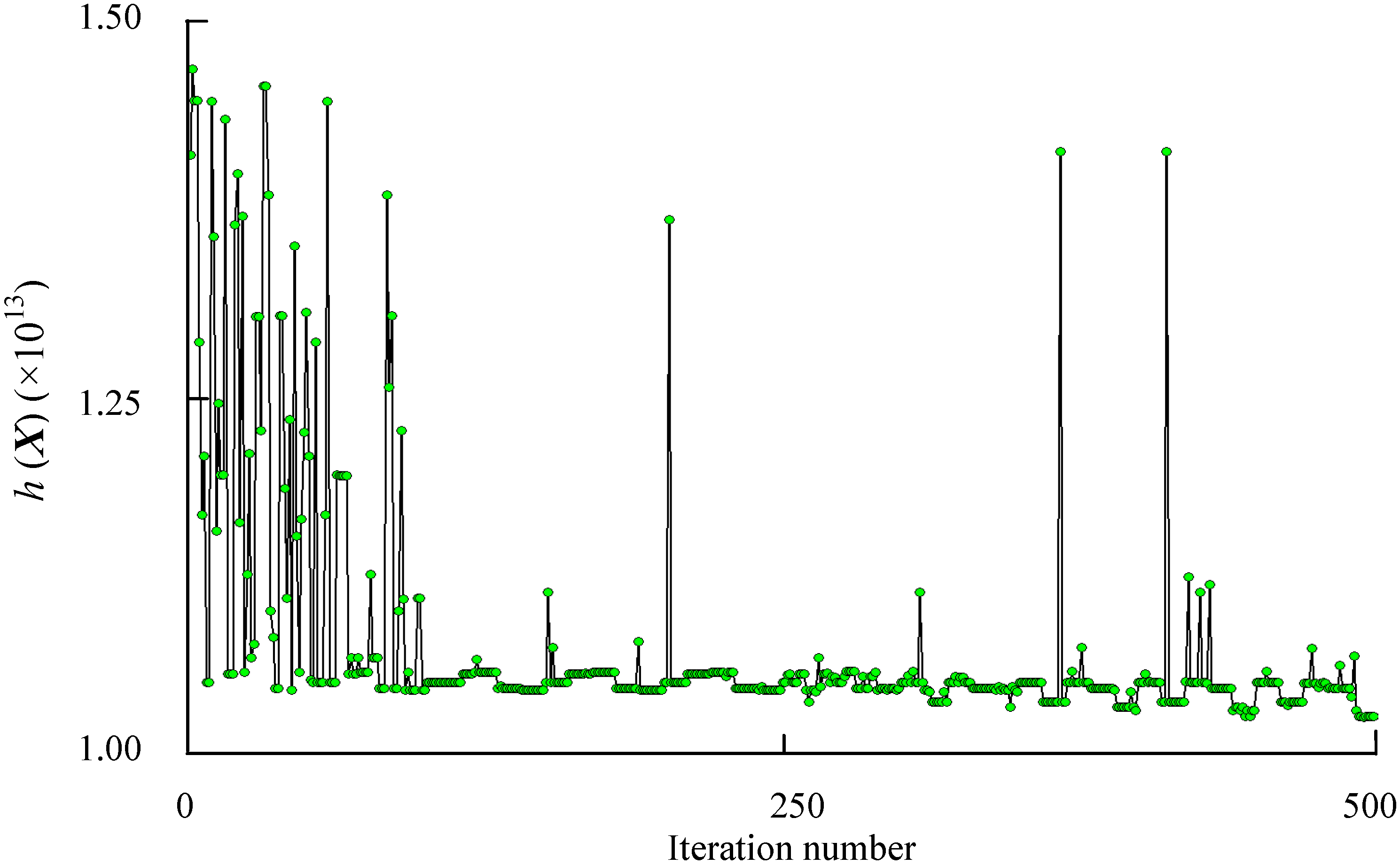
5.5. Results of Robust Optimization
| Description | Symbols | Initial Design | Robust Optimization |
|---|---|---|---|
| Design variables (mm) | x1 | 8 | 9.3398106 |
| x2 | 5 | 5.9304183 | |
| x3 | 1.5 | 1.7980107 | |
| x4 | 0.8 | 0.7820910 | |
| x5 | 0.4 | 0.44435784 | |
| x6 | 1.5 | 1.79393558 | |
| 1st resonance frequency (Hz) | 12727 | 16180 | |
| 2nd resonance frequency (Hz) | 19184 | 26156 | |
| Frequency difference (Hz) | fN | 6457 | 9976 |
| Sensitivity of output capacitance (10−12 F/m·s−2) | K | 2.5947 | 8.9323 |
| Robust constraints | 1.4356 × 1013 | 1.0314 × 1013 |
6. Conclusions
- (1)
- The mathematical model of the MEMS accelerometer is built, and the calculation method of the output capacitance is proposed. The relationship between the input acceleration and output capacitance are determined.
- (2)
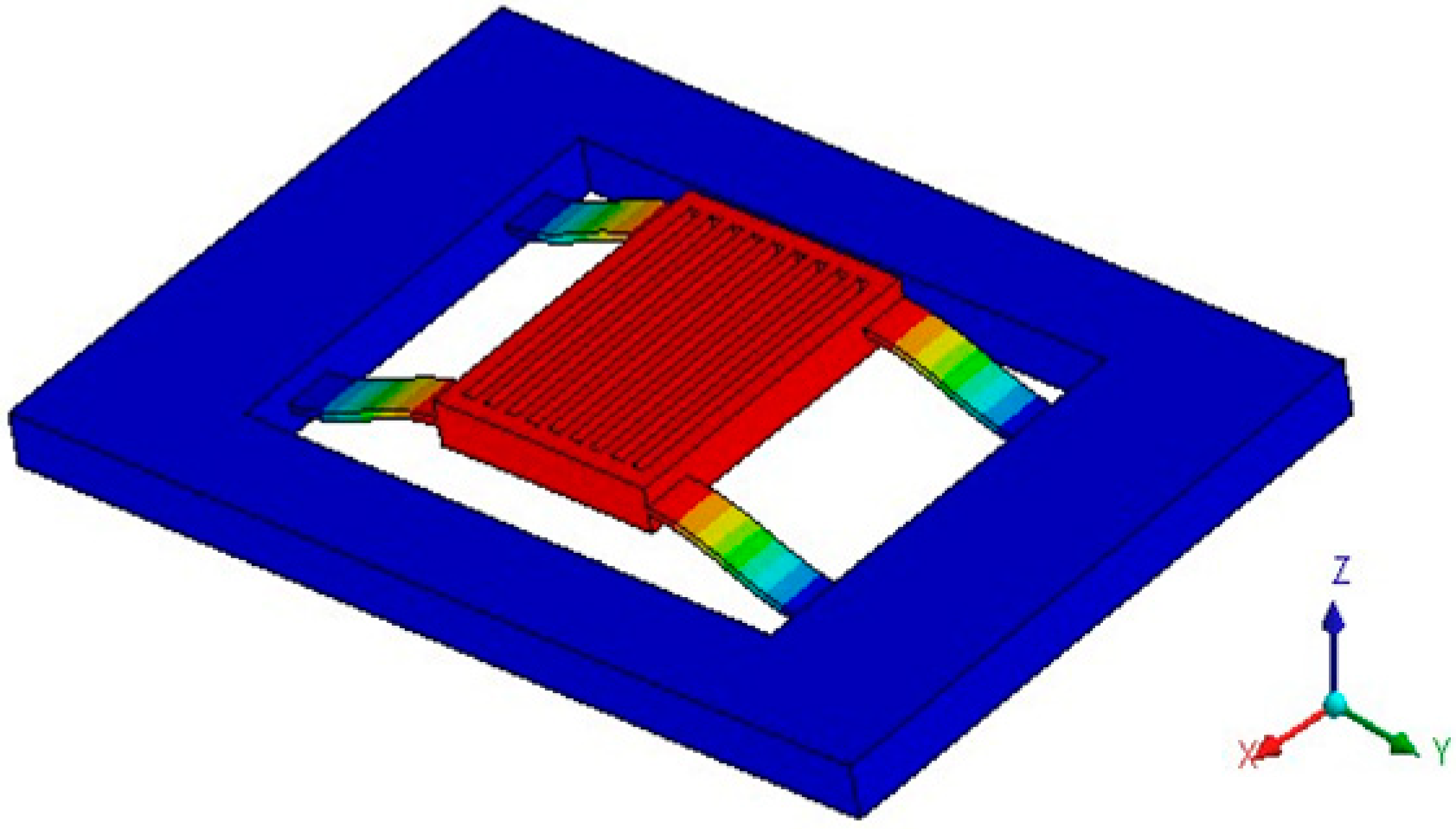
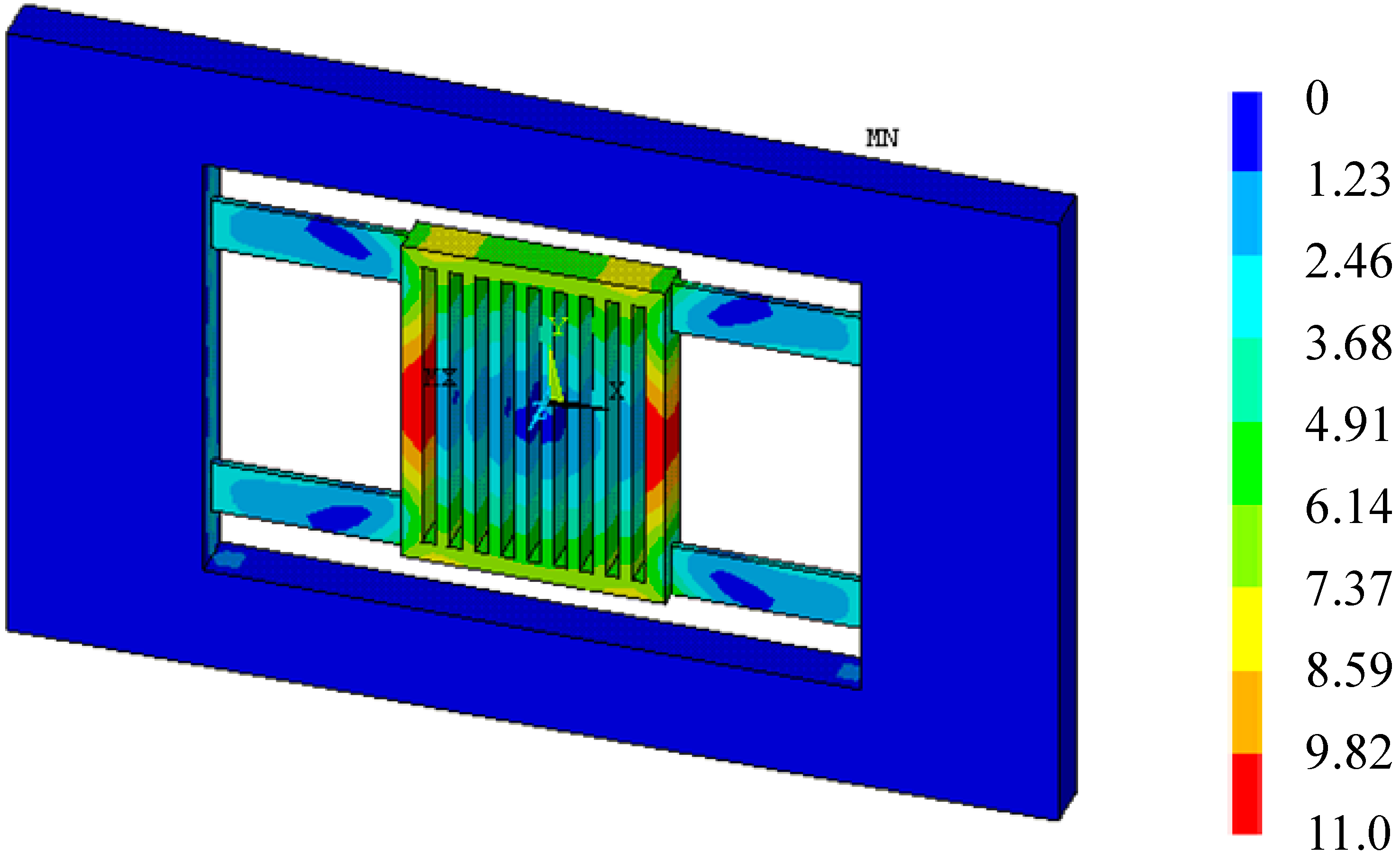
- The effects of temperature variations on the accelerometer are investigated. Thermal deformation of the accelerometer is analyzed. When temperature arising from 20 °C to 40 °C, the proof mass has the maximum deformation 0.11 μm, and the suspension beams also has a relative large deformation up to 0.037 µm. The thermal deformation finally leads to output errors of the accelerometer. The deviations of the resonance frequency and output capacitance of the accelerometer due to temperature variations are calculated. It is found that the temperature variations have little influence on the resonance frequency and have a significant influence on the output capacitance. Temperature variations can result in maximum output deviation by 14.7%.
- (3)
- A sensitivity analysis of the output capacitance and resonance frequency of the accelerometer is performed. The structural parameters that have greatest influence on the output capacitance are found out. The length and width of the accelerometer as well as length of the suspension beams are considered the most significant parameters determining the output performance of the accelerometer, which provides a reference for the fabrication process of the accelerometer. According to the results of sensitivity analysis, six structural parameters are selected as design variables for the robust optimization of the accelerometer. The dimensions of design space for the robust optimization are therefore reduced, and a time-saving optimization could be carried out.
- (4)
- The robust optimization procedure of the accelerometer is presented. The mathematical model for the robust optimization is proposed, and an optimized structure robust to temperature variations is obtained. The optimization results show that the sensitivity of output capacitance increases by 244.2%. An optimized accelerometer with high sensitivity, high temperature robustness and decoupling structure is finally obtained.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yang, Z.; Li, X. Simulation and optimization on the squeeze-film damping of a novel high-g accelerometer. Microelectron. J. 2006, 37, 383–387. [Google Scholar] [CrossRef]
- Han, J.S.; Kwak, B.M. Robust optimal design of a vibratory microgyroscope considering fabrication errors. J. Micromech. Microeng. 2001, 11, 662–671. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Sheng, X.; Wang, S.; Yang, B.; Huang, L. A novel temperature compensation method for a MEMS gyroscope oriented on a periphery circuit. Int. J. Adv. Robot. Syst. 2013, 10, 1–11. [Google Scholar]
- Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing. Sens. Actuators A-Phys. 2013, 201, 517–524. [Google Scholar] [CrossRef]
- Xu, L.; Yang, B.; Wang, S.; Li, H.; Huang, L. Research on Thermal Characteristics and on-chip Temperature-controlling for Silicon Micro-gyroscope. In Proceedings of International Conference on Information and Automation, Shenzhen, China, 6–8 June 2011.
- Rochus, V.; Geuzaine, C. A primal/dual approach for the accurate evaluation of the electromechanical coupling in MEMS. Finite Elem. Anal. Des. 2012, 49, 19–27. [Google Scholar] [CrossRef]
- Chang, H.; Zhang, Y.; Xie, J.; Zhou, Z.; Yuan, W. Integrated behavior simulation and verification for a MEMS vibratory gyroscope using parametric model order reduction. J. Microelectromech. Syst. 2010, 19, 282–293. [Google Scholar] [CrossRef]
- Dai, G.; Li, M.; He, X.; Du, L.; Shao, B.; Su, W. Thermal drift analysis using a multiphysics model of bulk silicon MEMS capacitive accelerometer. Sens. Actuators A-Phys. 2011, 172, 369–378. [Google Scholar] [CrossRef]
- Kuramochi, N.; Toshiba, K.; Mochiduki, K.; Tsuchitani, M. Application of Robust Design for the Tuning of Resistance-temperature Characteristics in Diodes. In Proceedings of International Symposium on Semiconductor Manufacturing, Santa Clara, CA, USA, 15–17 October 2007.
- Sadeghian, H.; Doniavi, A. Analysis of quality design techniques for electrostatic actuators. J. Phys.: Conf. Ser. 2006, 34, 919–924. [Google Scholar] [CrossRef]
- Coultate, J.K.; Fox, C.H.J.; Mcwilliam, S.; Malvern, A.R. Application of optimal and robust design methods to a MEMS accelerometer. Sens. Actuators A-Phys. 2008, 142, 88–96. [Google Scholar] [CrossRef]
- Wu, D.H.; Tsai, Y.J.; Yen, Y.T. Robust design of quartz crystal microbalance using finite element and Taguchi method. Sens. Actuators B-Chem. 2003, 92, 337–344. [Google Scholar] [CrossRef]
- Doltsinis, I.; Kang, Z. Robust design of structures using optimization methods. Comput. Method. Appl. M. 2004, 193, 2221–2237. [Google Scholar] [CrossRef]
- Han, J.S.; Kwak, B.M. Robust optimization using a gradient index: MEMS applications. Struct. Multidiscip. Optim. 2004, 27, 469–478. [Google Scholar]
- Jiang, T.; Liu, G.; Wang, A.; Jiao, J. Robust Design of a Tuning Fork Vibratory Microgyroscope Considering Microfabrication Errors. In Proceedings of the 3rd International Conference on Nano/Micro Engineered and Molecular Systems, Sanya, China, 6–9 January 2008.
- Liu, R.; Paden, B.; Turner, K. MEMS resonators that are robust to process-induced feature width variations. J. Microelectromech. Syst. 2002, 11, 505–511. [Google Scholar] [CrossRef]
- Kok, S.; Rahman, A.; Fauzi, M. Design Considerations of MEMS Based Piezoelectric Cantilever for Harvesting Energy. In Proceedings of IEEE Asia-Pacific Conference on Applied Electromagnetic, Melaka, Malaysia, 11–13 December 2012.
- Martowicz, A.; Uhl, T. Reliability- and performance-based robust design optimization of MEMS structures considering technological uncertainties. Mech. Syst. Signal P. 2012, 32, 44–58. [Google Scholar] [CrossRef]
- Li, P.; Yang, H.; Fang, Y. Robust structure design for MEMS filters in telecommunication. Chin. J. Mech. Eng. 2005, 41, 132–136. [Google Scholar] [CrossRef]
- Corigliano, A.; Bagherinia, M.; Bruggi, M.; Mariani, S.; Lasalandra, E. Optimal design of a resonating MEMS magnetometer: A multi-physics approach. In Proceedings of the 14th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems, Wroclaw, Poland, 14–17 April 2013.
- Bagherinia, M.; Bruggi, M.; Corigliano, A. An efficient earth magnetic field mems sensor:modeling, experimental results, and optimization. J. Microelectromech. Syst. 2014. Available online: http://doi.org/10.1109/JMEMS.2014.2357852 (accessed on 25 September 2014).
- Zhu, Y.; Espinosa, H.D. Effect of temperature on capacitive RF MEMS switch performance—A coupled-field analysis. J. Micromech. Microeng. 2004, 14, 1270–1279. [Google Scholar] [CrossRef]
- Liu, G.; Wang, A.; Jiang, T.; Jiao, J.; Jang, J. Effects of environmental temperature on the performance of a micromachined gyroscope. Microsyst. Technol. 2008, 14, 199–204. [Google Scholar] [CrossRef]
- Painter, C.C.; Shkel, A.M. Structural and thermal modeling of a z-axis rate integrating gyroscope. J. Micromech. Microeng. 2003, 13, 229–237. [Google Scholar] [CrossRef]
- Lu, X.; Li, H. Probabilistic robust design for covariance minimization of nonlinear system. Mech. Mach. Theory 2012, 52, 195–205. [Google Scholar] [CrossRef]
- Binion, D.; Chen, X. Coupled electrothermal–mechanical analysis for MEMS via model order reduction. Finite Elem. Anal. Des. 2010, 46, 1068–1076. [Google Scholar] [CrossRef]
- Roshanian, J.; Keshavarz, Z. Effect of variable selection on multidisciplinary design optimization: a flight vehicle example. Chin. J. Aeronaut. 2007, 20, 86–96. [Google Scholar] [CrossRef]
- Breierova, L.; Choudhari, M. An introduction to sensitivity analysis. Massachusetts Institute of Technology: Cambridge, MA, USA, 2001. Available online: http://ocw.mit.edu/courses/sloan-school-of-management/15-988-system-dynamics-self-study-fall-1998-spring-1999/readings/sensitivityanalysis.pdf (accessed on 15 March 2015).
- Doltsinis, I.; Kang, Z.; Cheng, G. Robust design of non-linear structures using optimization methods. Comput. Method. Appl. M. 2005, 194, 1779–1795. [Google Scholar] [CrossRef]
- Allen, M.S.; Massad, J.E.; Field, R.V.; Dyck, C.W. Input and design optimization under uncertainty to minimize the impact velocity of an electrostatically actuated MEMS switch. J. Vib. Acoust. 2008, 130, 021009.1–021009.9. [Google Scholar] [CrossRef]
- Su, R.; Wang, X.; Gui, L.; Fan, Z. Multi-objective topology and sizing optimization of truss structures based on adaptive multi-island search strategy. Struct. Multidiscip. Optim. 2011, 43, 275–286. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Yang, F.; Bao, X.; Jiang, T. Robust Optimization of a MEMS Accelerometer Considering Temperature Variations. Sensors 2015, 15, 6342-6359. https://doi.org/10.3390/s150306342
Liu G, Yang F, Bao X, Jiang T. Robust Optimization of a MEMS Accelerometer Considering Temperature Variations. Sensors. 2015; 15(3):6342-6359. https://doi.org/10.3390/s150306342
Chicago/Turabian StyleLiu, Guangjun, Feng Yang, Xiaofan Bao, and Tao Jiang. 2015. "Robust Optimization of a MEMS Accelerometer Considering Temperature Variations" Sensors 15, no. 3: 6342-6359. https://doi.org/10.3390/s150306342
APA StyleLiu, G., Yang, F., Bao, X., & Jiang, T. (2015). Robust Optimization of a MEMS Accelerometer Considering Temperature Variations. Sensors, 15(3), 6342-6359. https://doi.org/10.3390/s150306342