Multi-GNSS Precise Positioning and Applications
A topical collection in Sensors (ISSN 1424-8220). This collection belongs to the section "Electronic Sensors".
Submission Status:
Closed
|
Viewed by 74086
Share This Topical Collection
Editors
Topical Collection Information
Dear Colleagues,
Precise, cm-level satellite positioning is possible through the tracking of radio-frequency signals of the pseudo-range (code) and carrier-phase types. This has traditionally required expensive GPS receivers and antennas that cost several thousands of dollars. In the past few years, however, there has been a development of mass-market, low-cost, single- and multi-frequency receivers (and smartphones), which are able to track the code and phase signals from several regional and global navigation satellite systems (RNSSs/GNSSs). These RNSSs/GNSSs include BDS (China), Galileo (Europe), QZSS (Japan), NavIC (India) and GLONASS (Russia), and the lower cost enables precise GNSS positioning for a range of new applications. There has also been a recent development in low Earth orbit (LEO) satellites that can help to improve the positioning performance further when augmented with GNSS.
This Topical Collection aims to highlight the development of such multi-GNSS positioning models and the performance that can be obtained. Topics include, but are not limited to, the following:
- Multi-GNSS inter-system and inter- and intra-frequency biases.
- Single/multi-frequency and multi-GNSS positioning and applications, making use of high-grade and low-cost receiver and antenna equipment (including smartphones).
- LEO and GNSS augmentation.
- Reliability analysis (ARAIM/DIA) using multi-GNSS models and single/multiple frequencies.
- Multi-GNSS networks and precise point positioning (PPP), real-time kinematic (RTK), and national positioning infrastructure (NPI) developments.
Dr. Robert Odolinski
Dr. Amir Khodabandeh
Collection Editors
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the collection website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 250 words) can be sent to the Editorial Office for assessment.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-anonymized peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Sensors is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript.
The Article Processing Charge (APC) for publication in this open access journal is 2600 CHF (Swiss Francs).
Submitted papers should be well formatted and use good English. Authors may use MDPI's
English editing service prior to publication or during author revisions.
Keywords
- Multi Global Navigation Satellite System (GNSS)
- Regional Navigation Satellite System (RNSS)
- Precise Real-Time Kinematic (RTK) positioning
- Precise Point Positioning (PPP)
- Inter-system biases (ISBs)
- Inter- and intra-system biases
- Low-cost receivers and antennas
- Smartphones
- Integer Ambiguity Resolution (IAR)
Published Papers (13 papers)
Open AccessArticle
Static Positioning under Tree Canopy Using Low-Cost GNSS Receivers and Adapted RTKLIB Software
by
Julián Tomaštík and Tim Everett
Cited by 17 | Viewed by 5057
Abstract
The decrease in costs and dimensions of GNSS receivers has enabled their adoption for a very wide range of users. Formerly mediocre positioning performance is benefiting from recent technology advances, namely the adoption of multi-constellation, multi-frequency receivers. In our study, we evaluate signal
[...] Read more.
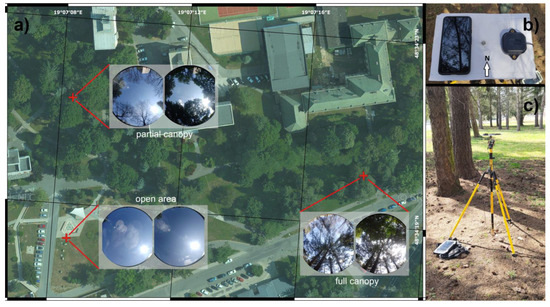
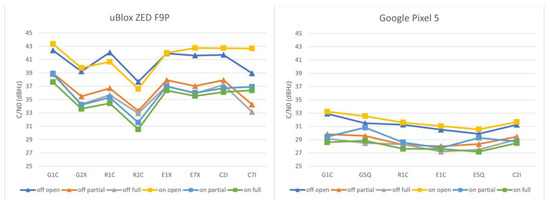
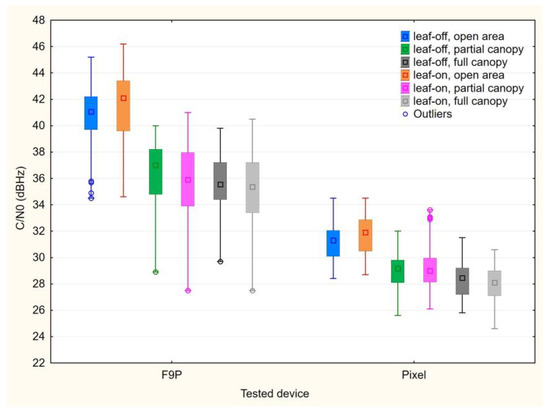
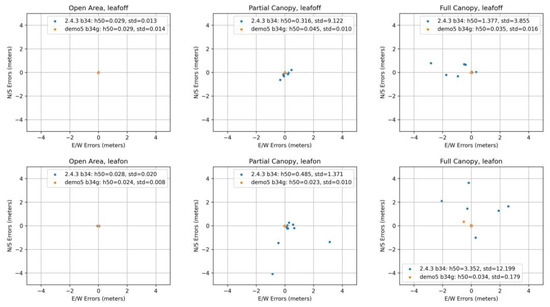
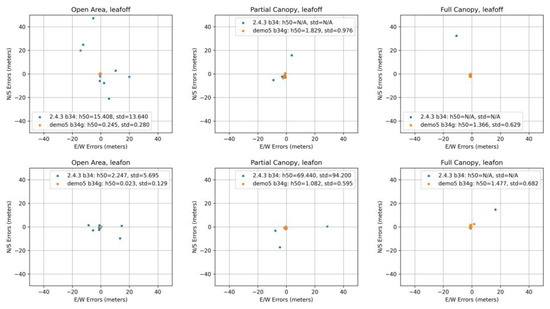
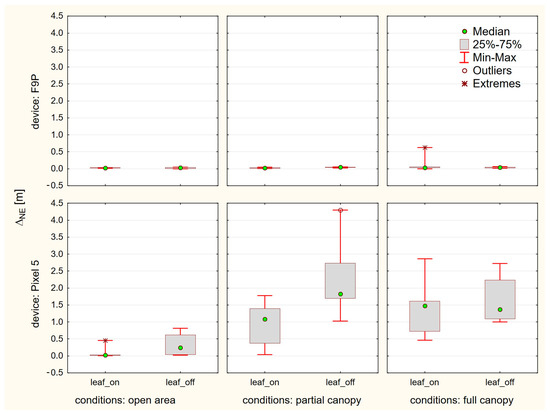
The decrease in costs and dimensions of GNSS receivers has enabled their adoption for a very wide range of users. Formerly mediocre positioning performance is benefiting from recent technology advances, namely the adoption of multi-constellation, multi-frequency receivers. In our study, we evaluate signal characteristics and horizontal accuracies achievable with two low-cost receivers—a Google Pixel 5 smartphone and a u-Blox ZED F9P standalone receiver. The considered conditions include open area with nearly optimal signal reception, but also locations with differing amounts of tree canopy. GNSS data were acquired using ten 20 min observations under leaf-on and leaf-off conditions. Post-processing in static mode was conducted using the Demo5 fork of the RTKLIB open source software, which is adapted for usage with lower quality measurement data. The F9P receiver provided consistent results with sub-decimeter median horizontal errors even under tree canopy. The errors for the Pixel 5 smartphone were under 0.5 m under open-sky conditions and around 1.5 m under vegetation canopy. The adaptation of the post-processing software to lower quality data was proven crucial, especially for the smartphone. In terms of signal quality (carrier-to-noise density, multipath), the standalone receiver provided significantly better data than the smartphone.
Full article
►▼
Show Figures
Open AccessArticle
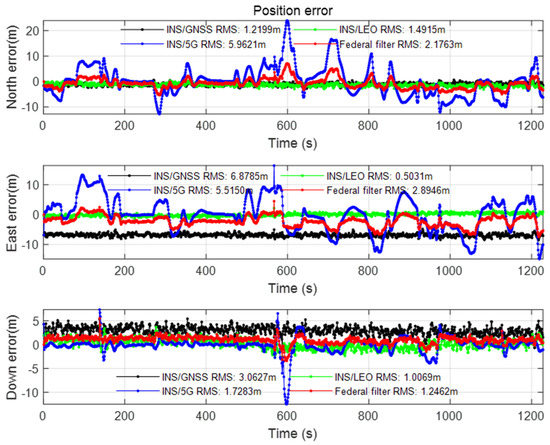
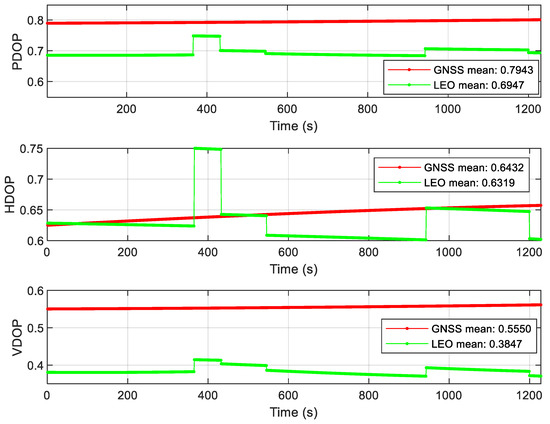
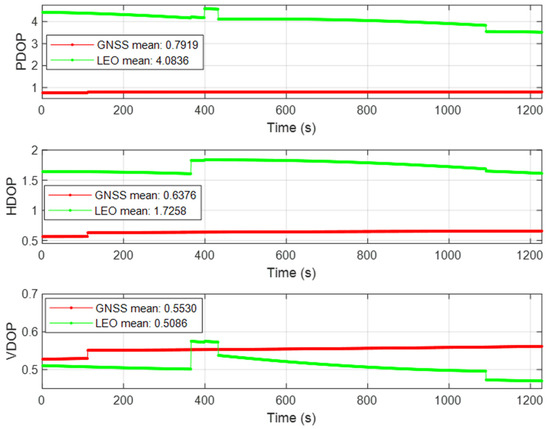
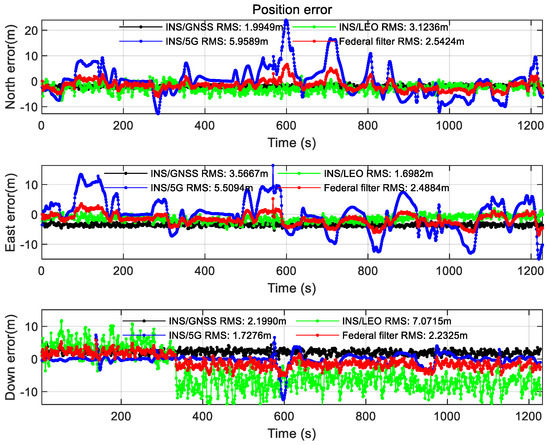
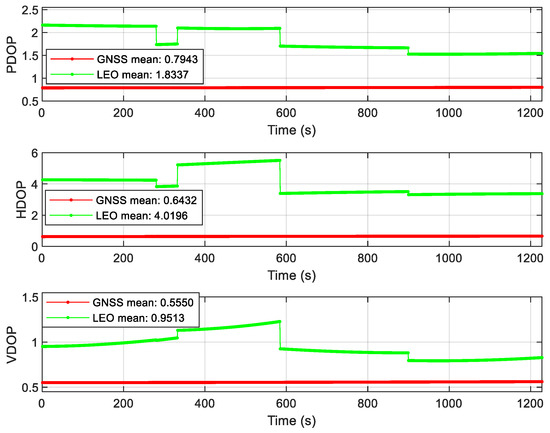
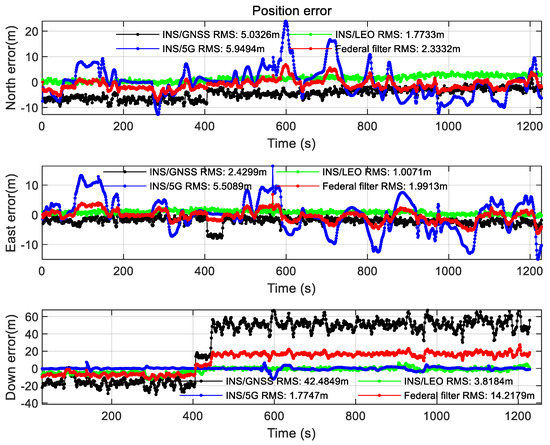
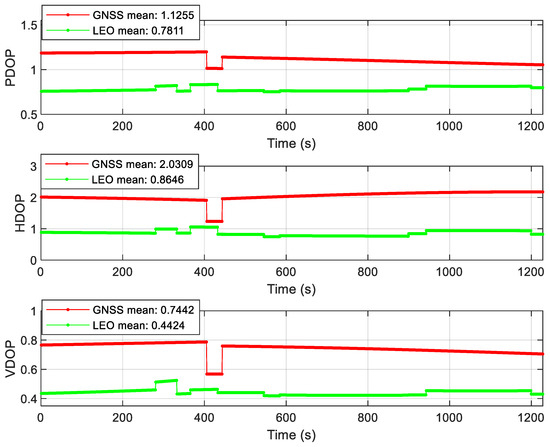
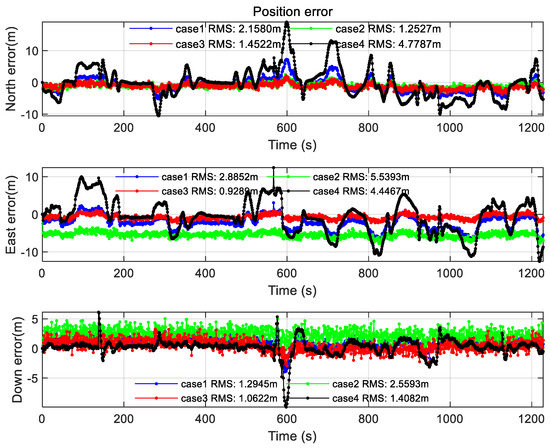
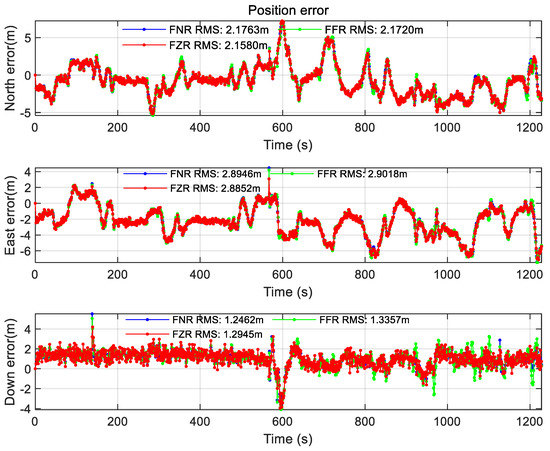
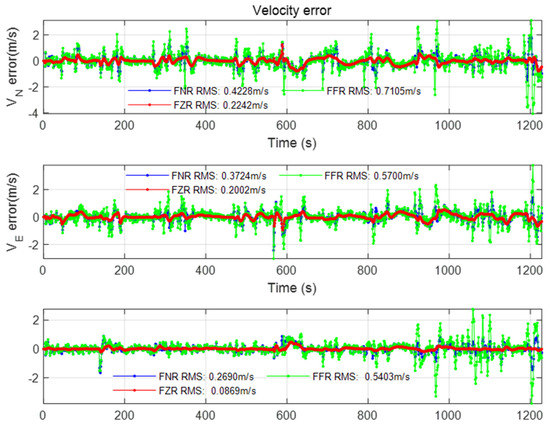
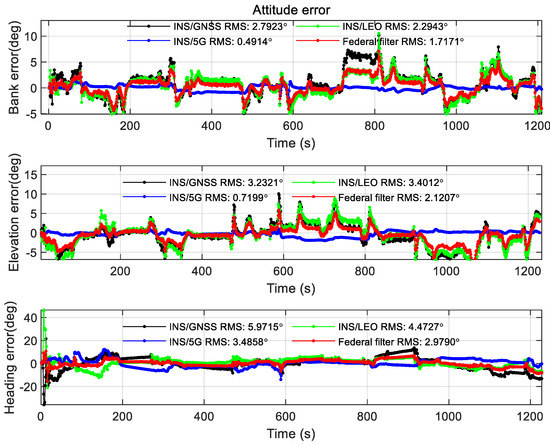
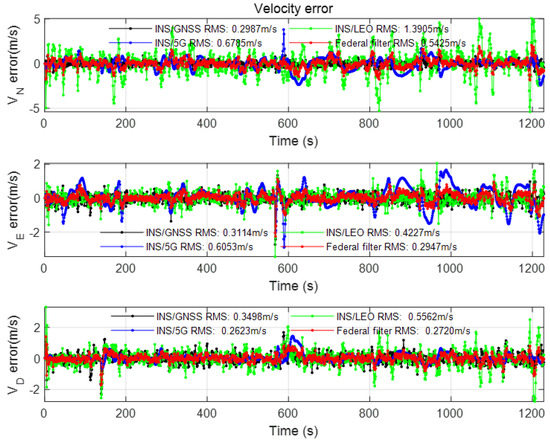
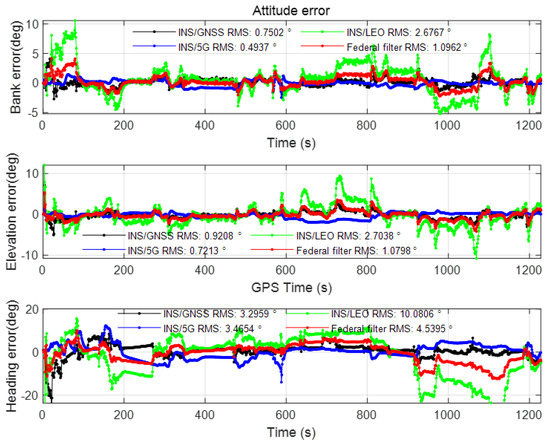
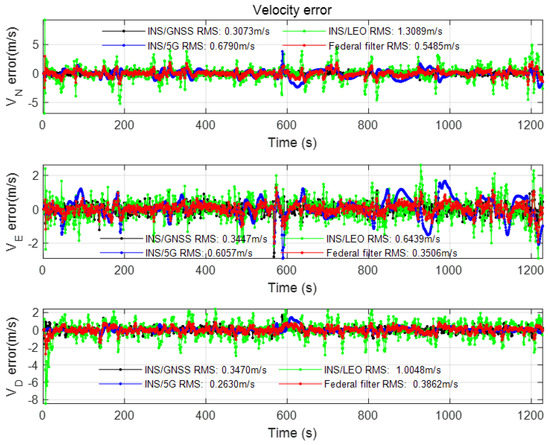
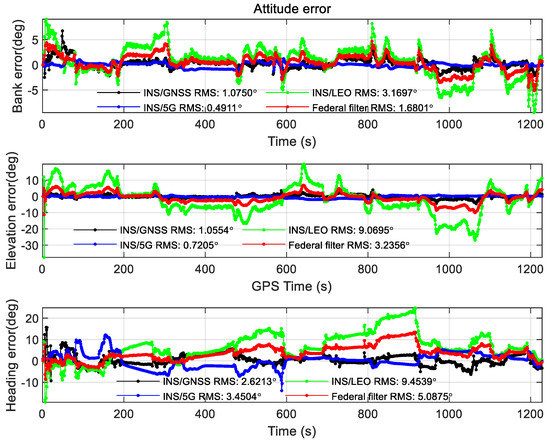
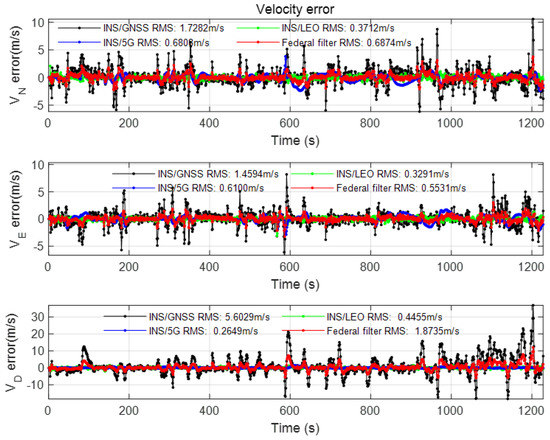
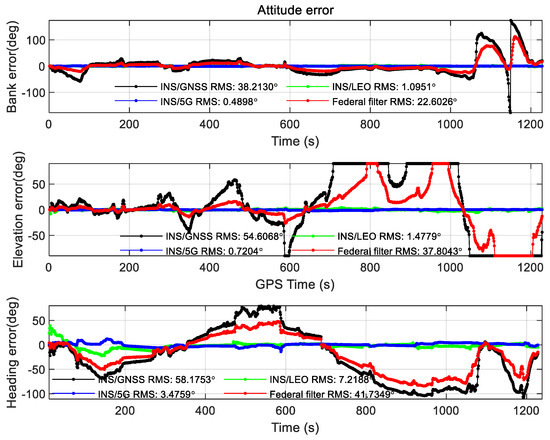
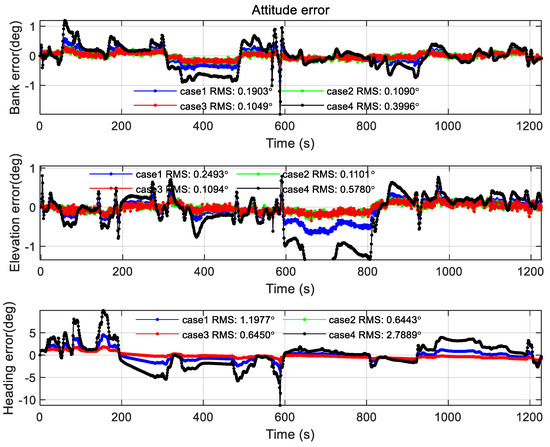
Simulation Experiment and Analysis of GNSS/INS/LEO/5G Integrated Navigation Based on Federated Filtering Algorithm
by
Yuqiang Wang, Bohao Zhao, Wei Zhang and Keman Li
Cited by 30 | Viewed by 5162
Abstract
This article examines the positioning effect of integrated navigation after adding an LEO constellation signal source and a 5G ranging signal source in the context of China’s new infrastructure construction. The tightly coupled Kalman federal filters are used as the algorithm framework. Each
[...] Read more.
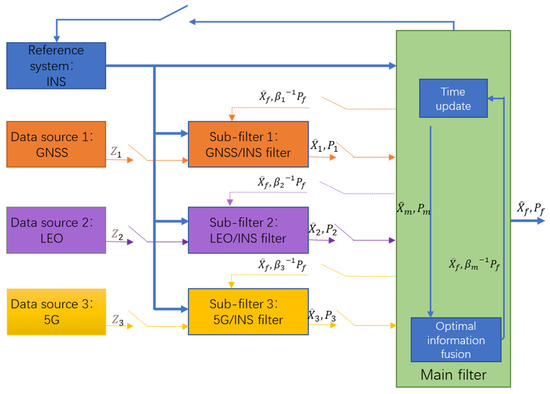
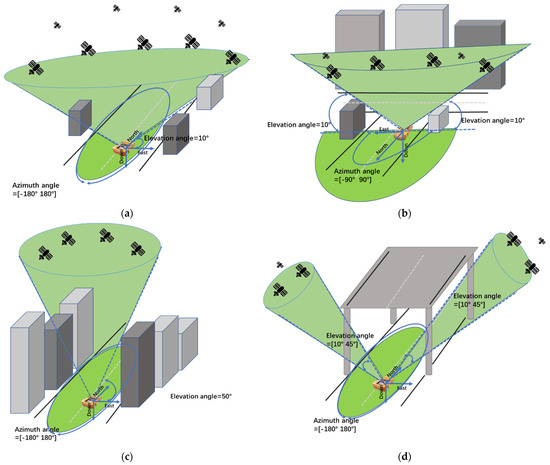
This article examines the positioning effect of integrated navigation after adding an LEO constellation signal source and a 5G ranging signal source in the context of China’s new infrastructure construction. The tightly coupled Kalman federal filters are used as the algorithm framework. Each signal source required for integrated navigation is simulated in this article. At the same time, by limiting the range of the azimuth angle and visible height angle, different experimental scenes are simulated to verify the contribution of the new signal source to the traditional satellite navigation, and the positioning results are analyzed. Finally, the article compares the distribution of different federal filtering information factors and reveals the method of assigning information factors when combining navigation with sensors with different precision. The experimental results show that the addition of LEO constellation and 5G ranging signals improves the positioning accuracy of the original INS/GNSS by an order of magnitude and ensures a high degree of positioning continuity. Moreover, the experiment shows that the federated filtering algorithm can adapt to the combined navigation mode in different scenarios by combining different precision sensors for navigation positioning.
Full article
►▼
Show Figures
Open AccessArticle
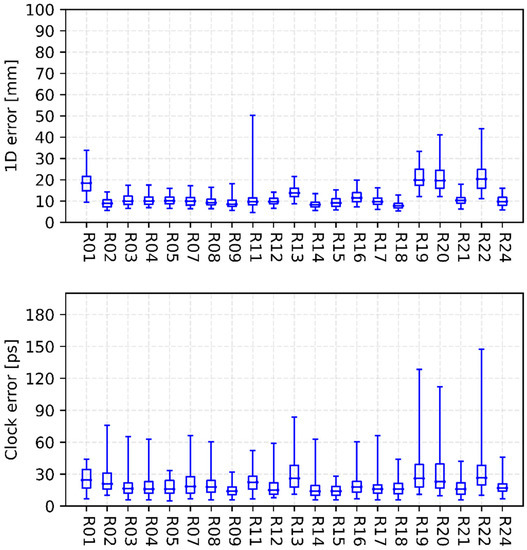
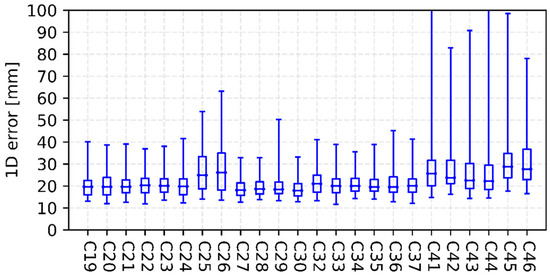
Multi-GNSS Combined Orbit and Clock Solutions at iGMAS
by
Wei Zhou, Hongliang Cai, Guo Chen, Wenhai Jiao, Qianqian He and Yuguo Yang
Cited by 20 | Viewed by 4817
Abstract
Global navigation services from the quad-constellation of GPS, GLONASS, BDS, and Galileo are now available. The international GNSS monitoring and assessment system (iGMAS) aims to evaluate the navigation performance of the current quad systems under a unified framework. In order to assess impact
[...] Read more.
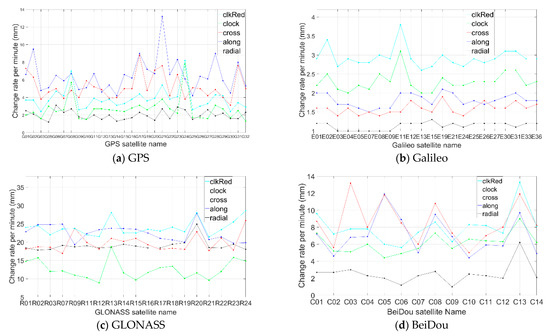
Global navigation services from the quad-constellation of GPS, GLONASS, BDS, and Galileo are now available. The international GNSS monitoring and assessment system (iGMAS) aims to evaluate the navigation performance of the current quad systems under a unified framework. In order to assess impact of orbit and clock errors on the positioning accuracy, the user range error (URE) is always taken as a metric by comparison with the precise products. Compared with the solutions from a single analysis center, the combined solutions derived from multiple analysis centers are characterized with robustness and reliability and preferred to be used as references to assess the performance of broadcast ephemerides. In this paper, the combination method of iGMAS orbit and clock products is described, and the performance of the combined solutions is evaluated by various means. There are different internal precisions of the combined orbit and clock for different constellations, which indicates that consistent weights should be assigned for individual constellations and analysis centers included in the combination. For BDS-3, Galileo, and GLONASS combined orbits of iGMAS, the root-mean-square error (RMSE) of 5 cm is achieved by satellite laser ranging (SLR) observations. Meanwhile, the SLR residuals are characterized with a linear pattern with respect to the position of the sun, which indicates that the solar radiation pressure (SRP) model adopted in precise orbit determination needs further improvement. The consistency between combined orbit and clock of quad-constellation is validated by precise point positioning (PPP), and the accuracies of simulated kinematic tests are 1.4, 1.2, and 2.9 cm for east, north, and up components, respectively.
Full article
►▼
Show Figures
Open AccessArticle
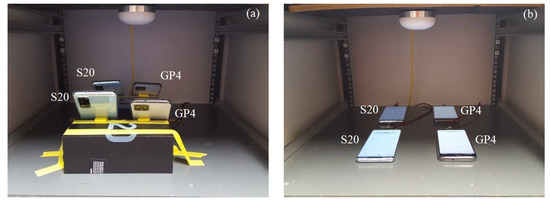
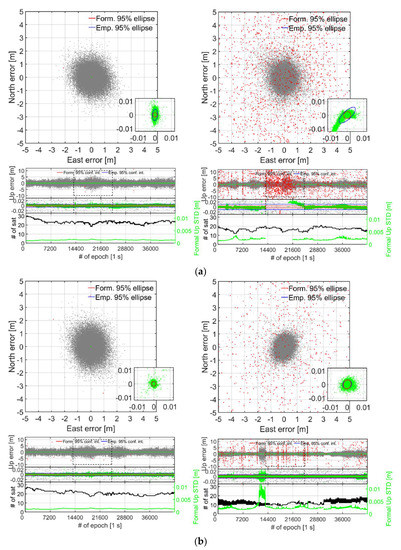
Instantaneous, Dual-Frequency, Multi-GNSS Precise RTK Positioning Using Google Pixel 4 and Samsung Galaxy S20 Smartphones for Zero and Short Baselines
by
Chien Zheng Yong, Robert Odolinski, Safoora Zaminpardaz, Michael Moore, Eldar Rubinov, Jeremiah Er and Mike Denham
Cited by 42 | Viewed by 10416
Abstract
The recent development of the smartphone Global Navigation Satellite System (GNSS) chipsets, such as Broadcom BCM47755 and Qualcomm Snapdragon 855 embedded, makes instantaneous and cm level real-time kinematic (RTK) positioning possible with Android-based smartphones. In this contribution we investigate the instantaneous single-baseline RTK
[...] Read more.
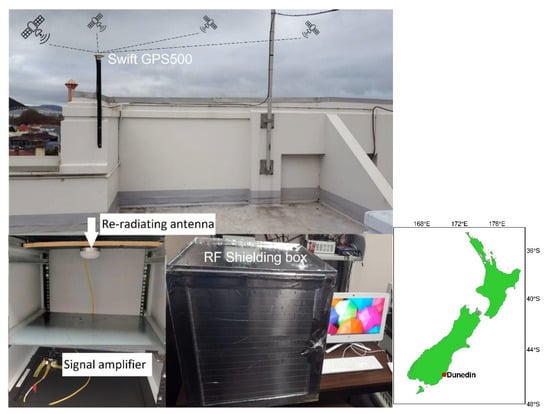
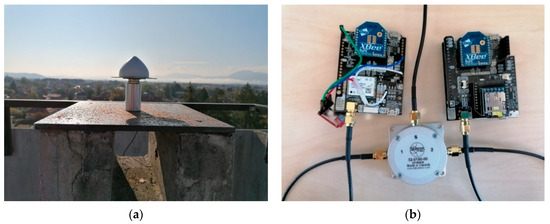
The recent development of the smartphone Global Navigation Satellite System (GNSS) chipsets, such as Broadcom BCM47755 and Qualcomm Snapdragon 855 embedded, makes instantaneous and cm level real-time kinematic (RTK) positioning possible with Android-based smartphones. In this contribution we investigate the instantaneous single-baseline RTK performance of Samsung Galaxy S20 and Google Pixel 4 (GP4) smartphones with such chipsets, while making use of dual-frequency L1 + L5 Global Positioning System (GPS), E1 + E5a Galileo, L1 + L5 Quasi-Zenith Satellite System (QZSS) and B1 BeiDou Navigation Satellite System (BDS) code and phase observations in Dunedin, New Zealand. The effects of locating the smartphones in an upright and lying down position were evaluated, and we show that the choice of smartphone configuration can affect the positioning performance even in a zero-baseline setup. In particular, we found non-zero mean and linear trends in the double-differenced carrier-phase residuals for one of the smartphone models when lying down, which become absent when in an upright position. This implies that the two assessed smartphones have different antenna gain pattern and antenna sensitivity to interferences. Finally, we demonstrate, for the first time, a near hundred percent (98.7% to 99.9%) instantaneous RTK integer least-squares success rate for one of the smartphone models and cm level positioning precision while using short-baseline experiments with internal and external antennas, respectively.
Full article
►▼
Show Figures
Open AccessArticle
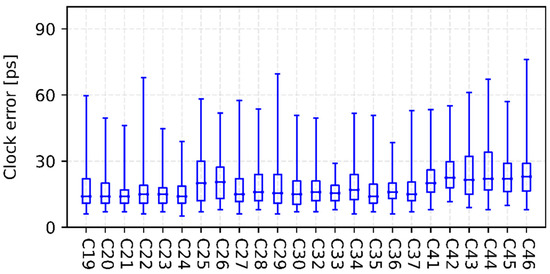
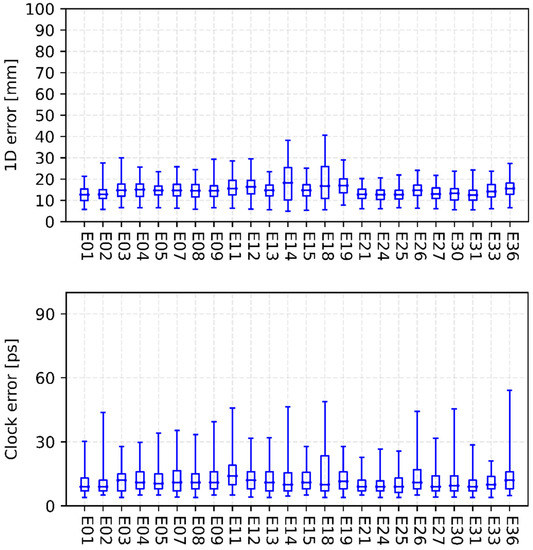
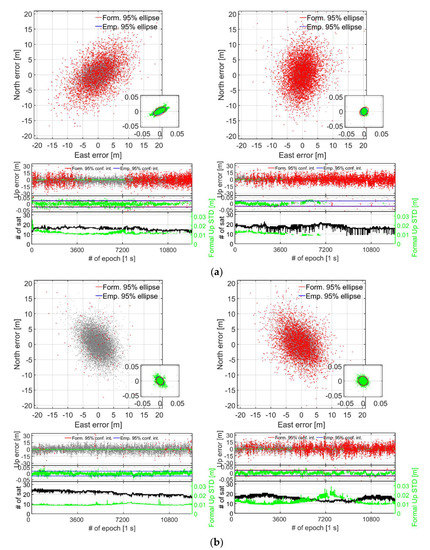
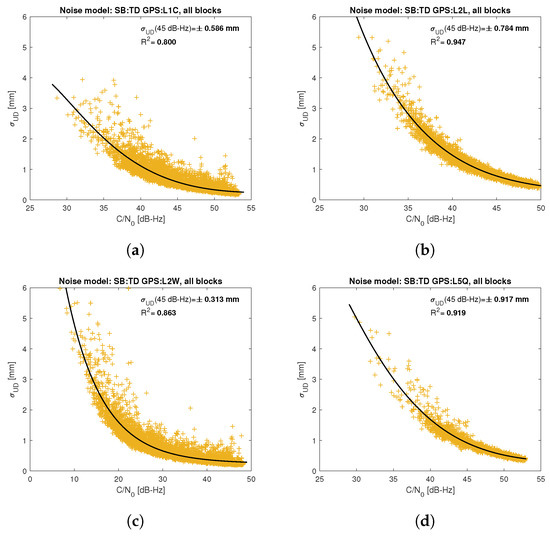
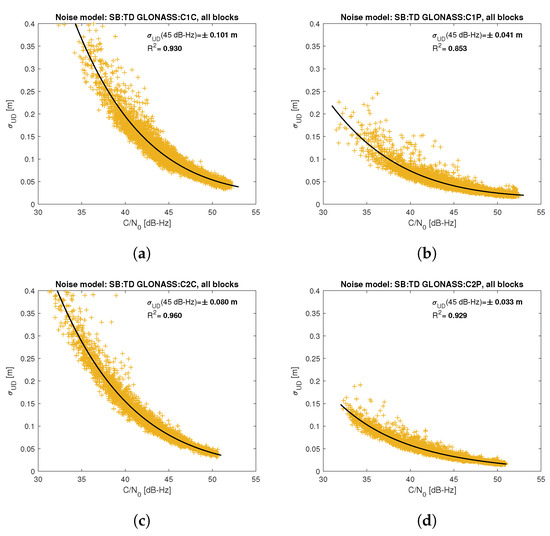
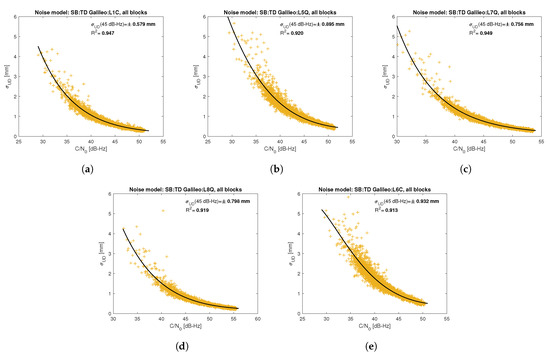
Empirical Stochastic Model of Multi-GNSS Measurements
by
Dominik Prochniewicz, Kinga Wezka and Joanna Kozuchowska
Cited by 15 | Viewed by 5683
Abstract
The stochastic model, together with the functional model, form the mathematical model of observation that enables the estimation of the unknown parameters. In Global Navigation Satellite Systems (GNSS), the stochastic model is an especially important element as it affects not only the accuracy
[...] Read more.
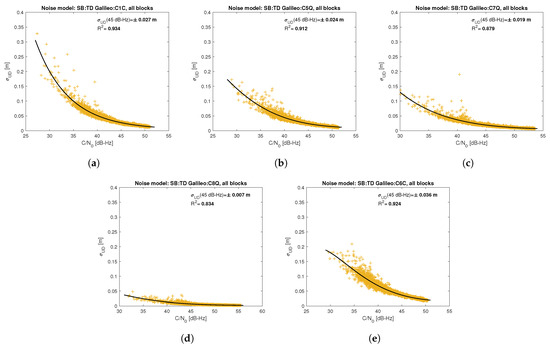
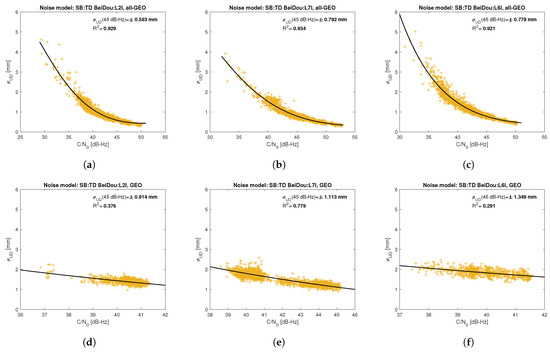
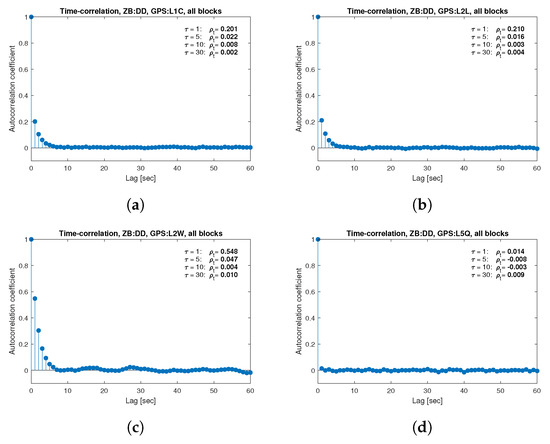
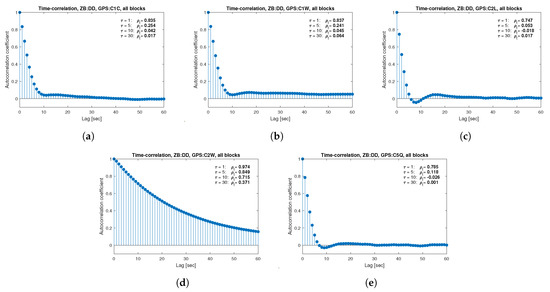
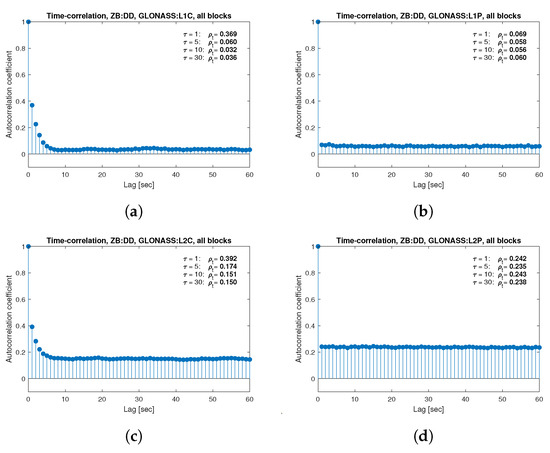
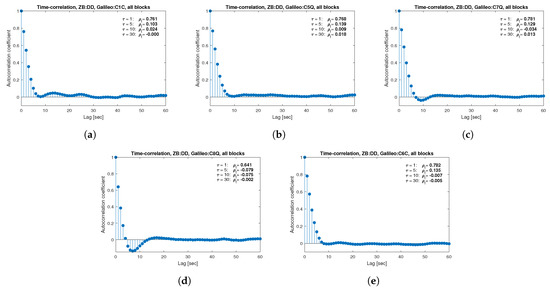
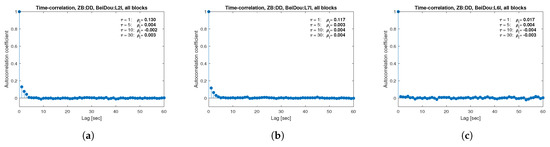
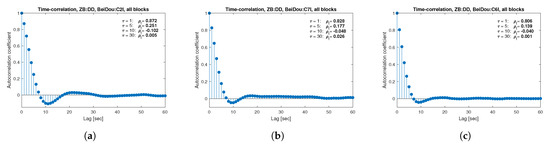
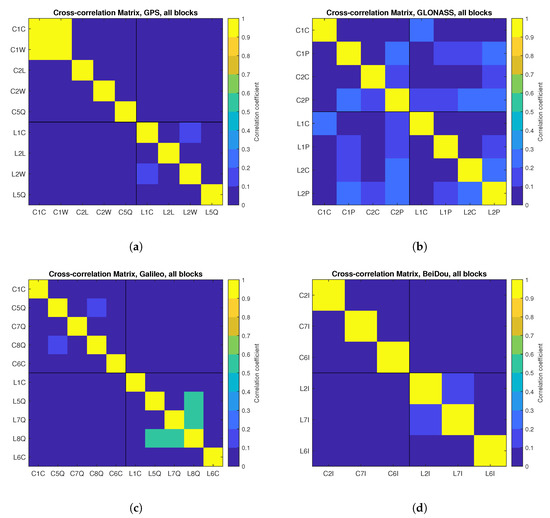
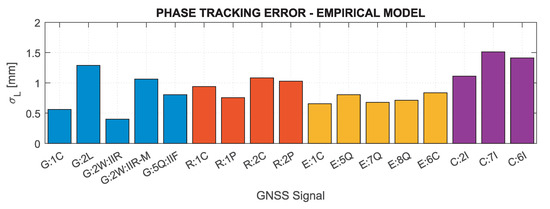
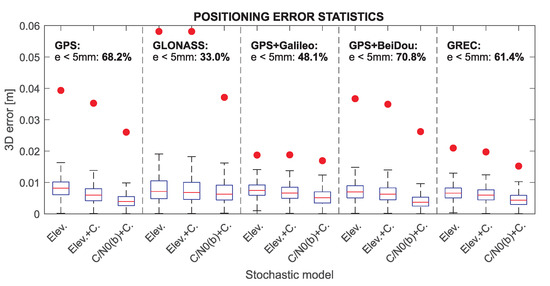
The stochastic model, together with the functional model, form the mathematical model of observation that enables the estimation of the unknown parameters. In Global Navigation Satellite Systems (GNSS), the stochastic model is an especially important element as it affects not only the accuracy of the positioning model solution, but also the reliability of the carrier-phase ambiguity resolution (AR). In this paper, we study in detail the stochastic modeling problem for Multi-GNSS positioning models, for which the standard approach used so far was to adopt stochastic parameters from the Global Positioning System (GPS). The aim of this work is to develop an individual, empirical stochastic model for each signal and each satellite block for GPS, GLONASS, Galileo and BeiDou systems. The realistic stochastic model is created in the form of a fully populated variance-covariance (VC) matrix that takes into account, in addition to the Carrier-to-Noise density Ratio (C/N
)-dependent variance function, also the cross- and time-correlations between the observations. The weekly measurements from a zero-length and very short baseline are utilized to derive stochastic parameters. The impact on the AR and solution accuracy is analyzed for different positioning scenarios using the modified Kalman Filter. Comparing the positioning results obtained for the created model with respect to the results for the standard elevation-dependent model allows to conclude that the individual empirical stochastic model increases the accuracy of positioning solution and the efficiency of AR. The optimal solution is achieved for four-system Multi-GNSS solution using fully populated empirical model individual for satellite blocks, which provides a 2% increase in the effectiveness of the AR (up to 100%), an increase in the number of solutions with errors below 5 mm by 37% and a reduction in the maximum error by 6 mm compared to the Multi-GNSS solution using the elevation-dependent model with neglected measurements correlations.
Full article
►▼
Show Figures
Open AccessArticle
Cloud-Based Single-Frequency Snapshot RTK Positioning
by
Xiao Liu, Miguel Ángel Ribot, Adrià Gusi-Amigó, Adria Rovira-Garcia, Jaume Sanz and Pau Closas
Cited by 9 | Viewed by 4637
Abstract
With great potential for being applied to Internet of Things (IoT) applications, the concept of cloud-based Snapshot Real Time Kinematics (SRTK) was proposed and its feasibility under zero-baseline configuration was confirmed recently by the authors. This article first introduces the general workflow of
[...] Read more.
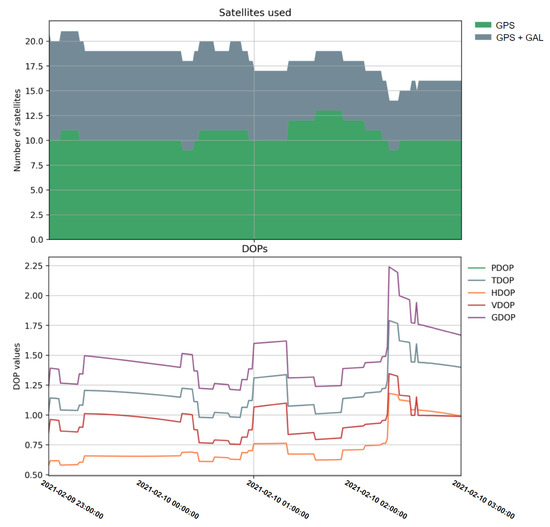
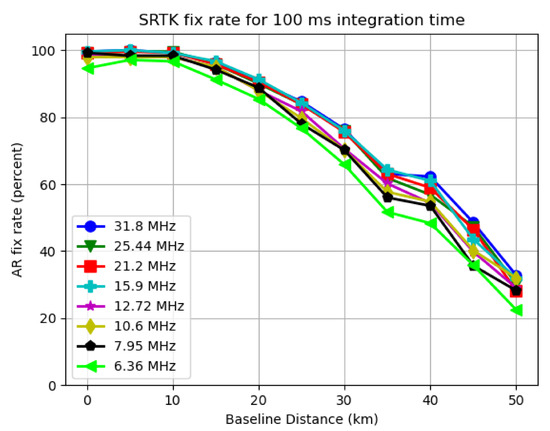
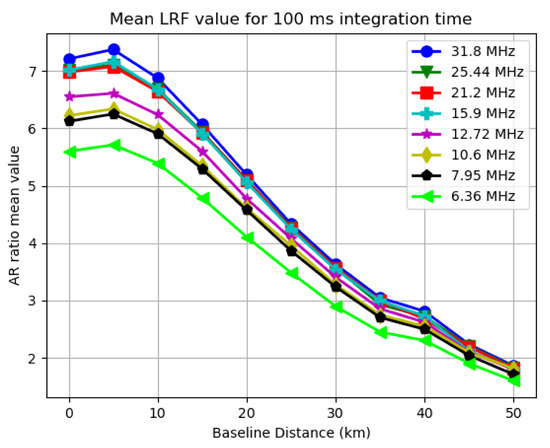
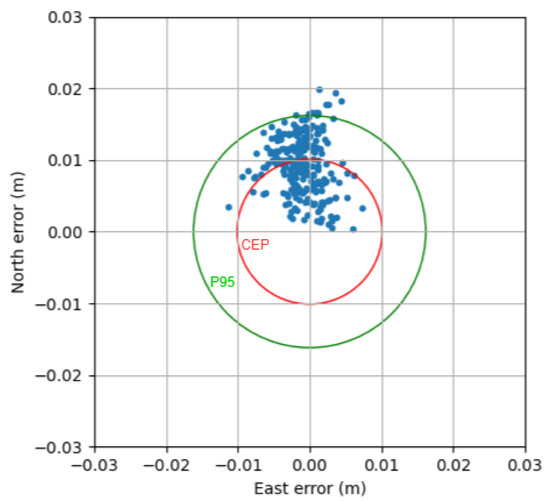
With great potential for being applied to Internet of Things (IoT) applications, the concept of cloud-based Snapshot Real Time Kinematics (SRTK) was proposed and its feasibility under zero-baseline configuration was confirmed recently by the authors. This article first introduces the general workflow of the SRTK engine, as well as a discussion on the challenges of achieving an SRTK fix using actual snapshot data. This work also describes a novel solution to ensure a nanosecond level absolute timing accuracy in order to compute highly precise satellite coordinates, which is required for SRTK. Parameters such as signal bandwidth, integration time and baseline distances have an impact on the SRTK performance. To characterize this impact, different combinations of these settings are analyzed through experimental tests. The results show that the use of higher signal bandwidths and longer integration times result in higher SRTK fix rates, while the more significant impact on the performance comes from the baseline distance. The results also show that the SRTK fix rate can reach more than 93% by using snapshots with a data size as small as 255 kB. The positioning accuracy is at centimeter level when phase ambiguities are resolved at a baseline distance less or equal to 15 km.
Full article
►▼
Show Figures
Open AccessArticle
Exploring Signals on L5/E5a/B2a for Dual-Frequency GNSS Precise Point Positioning
by
Nacer Naciri, André Hauschild and Sunil Bisnath
Cited by 12 | Viewed by 4191
Abstract
Due to its nature, Precise Point Positioning (PPP) depends on the GNSS measurements and quality of satellite correction products used to relatively quickly provide precise and accurate positions. With the rapid evolution of Global Navigation Satellite Systems (GNSSs), new frequencies and signals are
[...] Read more.
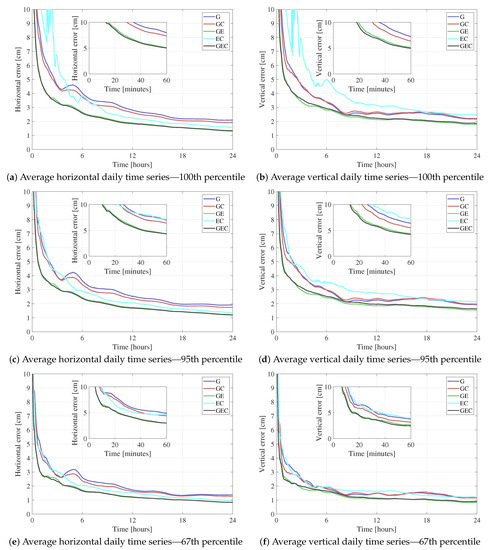
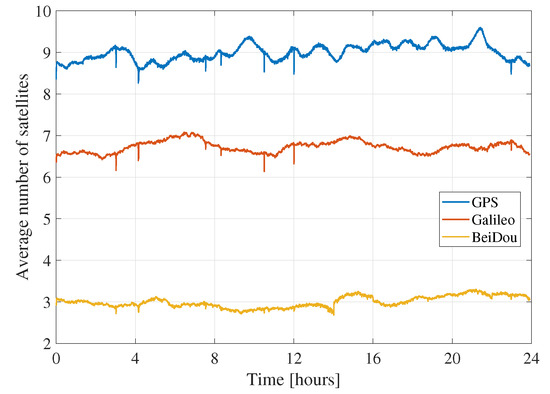
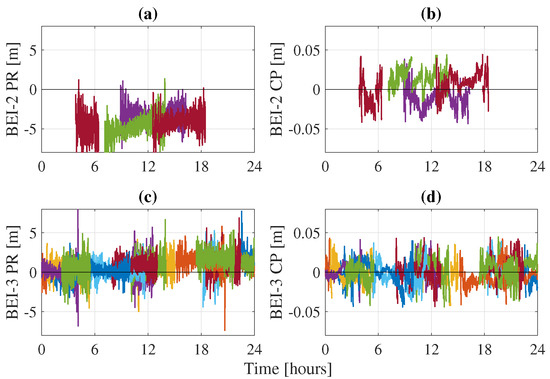
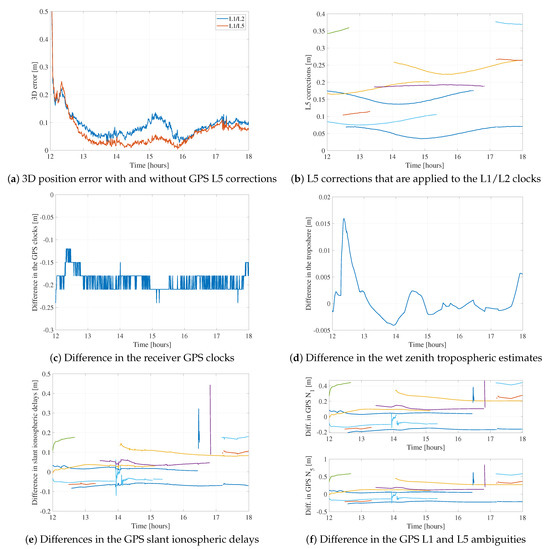
Due to its nature, Precise Point Positioning (PPP) depends on the GNSS measurements and quality of satellite correction products used to relatively quickly provide precise and accurate positions. With the rapid evolution of Global Navigation Satellite Systems (GNSSs), new frequencies and signals are being broadcast, which have a positive impact on PPP performance. This paper presents, for the first time, a comprehensive analysis of PPP performance from these new GPS, Galileo and BeiDou-2/3 signals, which are not yet commonly used for PPP, with correct mitigation of errors such as the estimation of GPS Block-IIF L5 variations. Satellite orbits and clocks, as well as GPS Block-IIF L5 corrections, are estimated in real-time using DLR’s RETICLE engine, while the user processing is performed with York University’s PPP engine. First, as a reference, PPP performance is assessed on widely used signals: GPS L1/L2, Galileo E1/E5a, and BeiDou-2/3 B1-2/B3. Horizontal and vertical rms of 2.3 and 2.6 cm, respectively, are achieved in static processing and 5.4 and 7.5 cm in kinematic processing after 1 h of processing using real-time satellite correction products. The compatibility of BeiDou-2 and BeiDou-3 on the shared B1-2/B3 frequencies is analyzed and discrepancies in the receiver clock are found. Next, since all three constellations share two common frequencies, the paper focuses on analyzing PPP performance of GPS, Galileo and BeiDou-3 on [L1, E1, B1] at 1575.42 MHz and [L5, E5a, B2a] at 1176.45 MHz. Horizontal and vertical rms of 6.9 and 7.1 cm are achieved in kinematic processing. The effect of the known GPS Block-IIF L5 biases is studied as well, as it is shown to affect the receiver position and clock, as well as the ionospheric estimates and ambiguities. Average improvements of 15% and 20% in the horizontal and vertical rms, respectively, are observed when these biases are mitigated.
Full article
►▼
Show Figures
Open AccessArticle
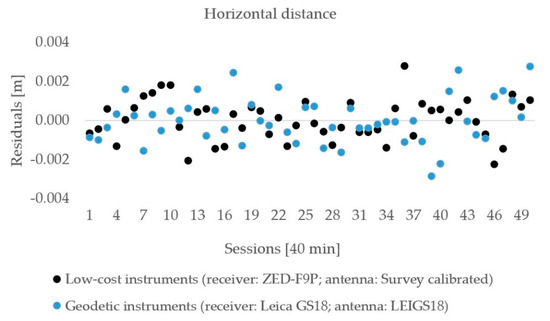
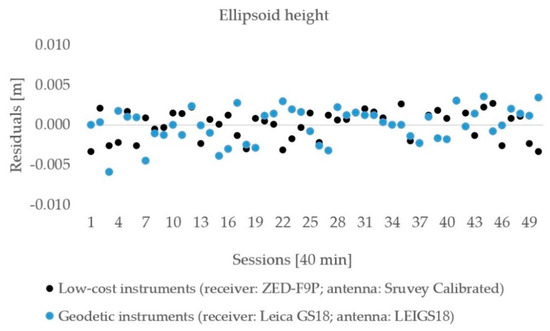
Testing the Performance of Multi-Frequency Low-Cost GNSS Receivers and Antennas
by
Veton Hamza, Bojan Stopar and Oskar Sterle
Cited by 54 | Viewed by 8836
Abstract
Global Navigation Satellite System (GNSS) low-cost multi-frequency receivers are argued as an alternative to geodetic receivers for many applications. Calibrated low-cost antennas recently became available on the market making low-cost instruments more comparable with geodetic ones. The main goal of this research was
[...] Read more.
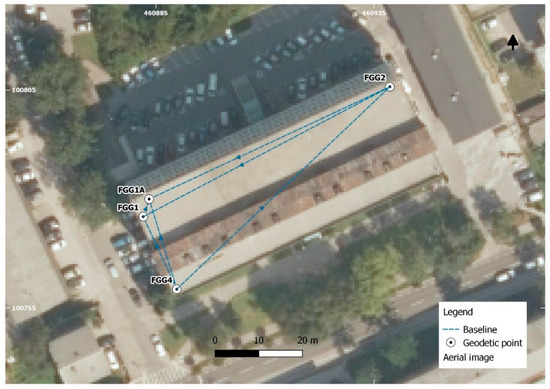
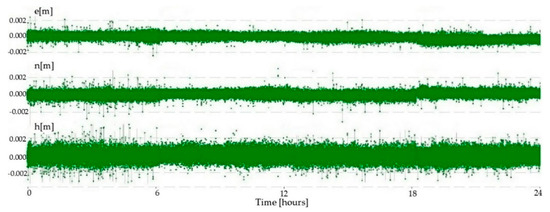
Global Navigation Satellite System (GNSS) low-cost multi-frequency receivers are argued as an alternative to geodetic receivers for many applications. Calibrated low-cost antennas recently became available on the market making low-cost instruments more comparable with geodetic ones. The main goal of this research was to evaluate the noise of low-cost GNSS receivers, to compare the positioning quality from different types of low-cost antennas, and to analyze the positioning differences between low-cost and geodetic instruments. The results from a zero baseline test indicated that the u-blox multi-frequency receiver, namely, ZED-F9P, had low noise that was at the sub-millimeter level. To analyze the impact of the antennas in the obtained coordinates, a short baseline test was applied. Both tested uncalibrated antennas (Tallysman TW3882 and Survey) demonstrated satisfactory positioning performance. The Tallysman antenna was more accurate in the horizontal position determination, and the difference from the true value was only 0.1 mm; while, for the Survey antenna, the difference was 1.0 mm. For the ellipsoid height, the differences were 0.3 and 0.6 mm for the Survey and Tallysman antennas, respectively. The comparison of low-cost receivers with calibrated low-cost antennas (Survey Calibrated) and geodetic instruments proved better performance for the latter. The geodetic GNSS instruments were more accurate than the low-cost instruments, and the precision of the estimated coordinates from the geodetic network was also greater. Low-cost GNSS instruments were not at the same level as the geodetic ones; however, considering their cost, they demonstrated excellent performance that is sufficiently appropriate for various geodetic applications.
Full article
►▼
Show Figures
Open AccessArticle
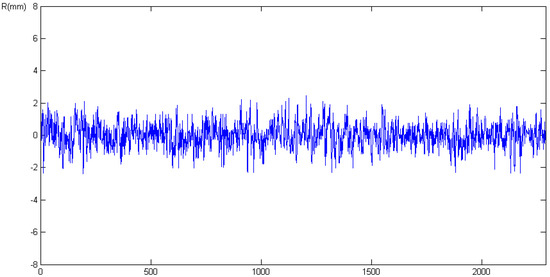
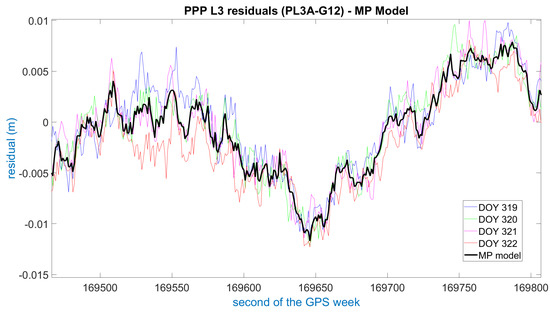
Development of a Submillimetric GNSS-Based Distance Meter for Length Metrology
by
Luis García-Asenjo, Sergio Baselga, Chris Atkins and Pascual Garrigues
Cited by 16 | Viewed by 3649
Abstract
Absolute distance determination in the open air with an uncertainty of a few tenths of a millimetre is increasingly required in many applications that involve high precision geodetic metrology. No matter the technique used to measure, the resulting distances must be proven consistent
[...] Read more.
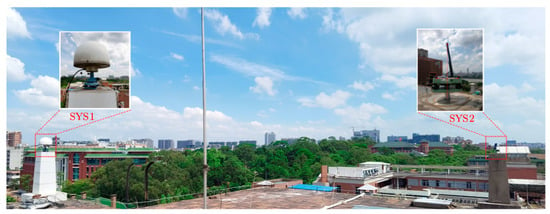
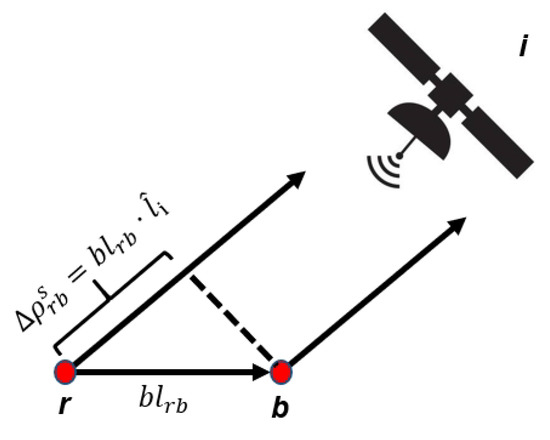
Absolute distance determination in the open air with an uncertainty of a few tenths of a millimetre is increasingly required in many applications that involve high precision geodetic metrology. No matter the technique used to measure, the resulting distances must be proven consistent with the unit of length (SI-metre) as realized in the outdoor facilities traditionally used in length metrology, which are also known as calibration baselines of reference. The current calibration baselines of reference have distances in the range of 10 to 1000 m, but at present there is no solution on the market to provide distances with submillimetric precision in that range. Consequently, new techniques such as multi-wave interferometry, two-wave laser telemeters or laser trackers are being developed. A possible alternative to those sophisticated and expensive techniques is the use of widely used Global Navigation Satellite Systems (GNSS) in order to provide a GNSS-Based Distance Meter (GBDM). The use of a GBDM as a potential technique for length metrology has been thoroughly analysed in several European research projects by using the state-of-the-art geodetic software, such as Bernese 5.2, but no definite conclusions have been drawn and some metrological questions are considered still open. In this paper, we describe a dedicated approach to build up a submillimetric GBDM able to be applied in the current calibration baselines of reference, as well as possible methods to cope with the multipath error of the GNSS signals which is the major limitation for the practical uptaking of the technique in metrology. The accuracy of the proposed approach has been tested following the length metrology standards in four experiments carried out in the Universitat Politècnica de València (UPV). The results demonstrate that the proposed GBDM can provide an accuracy of a few tenths of a millimetre in the current calibration baselines of reference.
Full article
►▼
Show Figures
Open AccessArticle
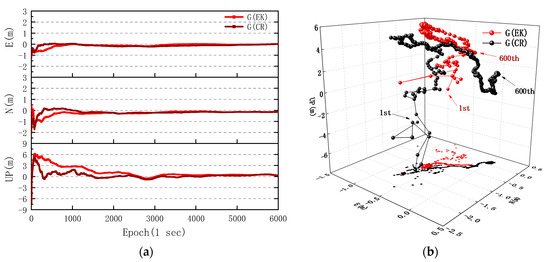
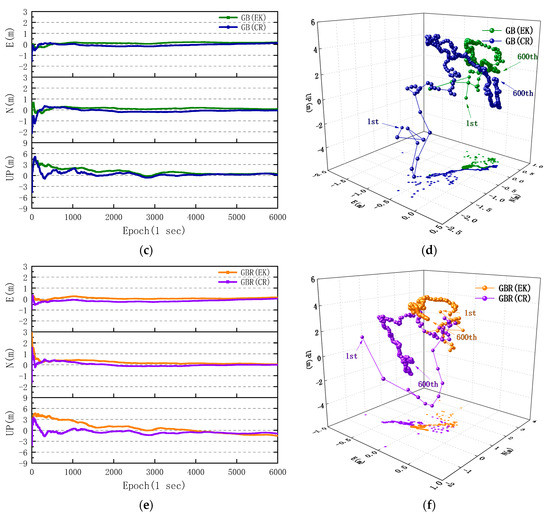
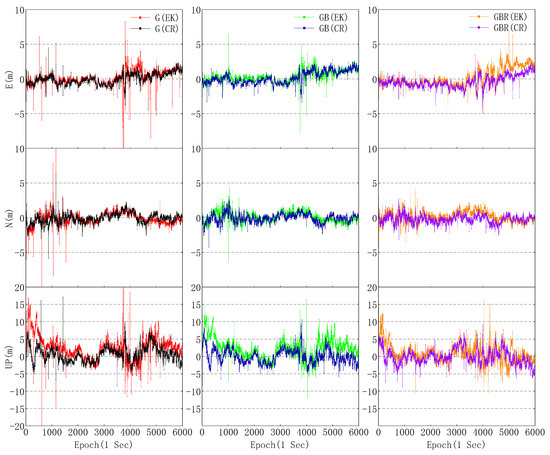
Improving the Performance of Time-Relative GNSS Precise Positioning in Remote Areas
by
Kaifei He, Duojie Weng, Shengyue Ji, Zhenjie Wang, Wu Chen, Yangwei Lu and Zhixi Nie
Cited by 5 | Viewed by 4505
Abstract
Global navigation satellite systems (GNSS) can attain centimeter level positioning accuracy, which is conventionally provided by real-time precise point positioning (PPP) and real-time kinematic (RTK) techniques. Corrections from the data center or the reference stations are required in these techniques to reduce various
[...] Read more.
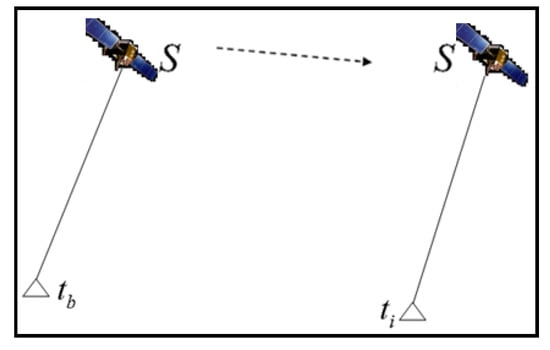
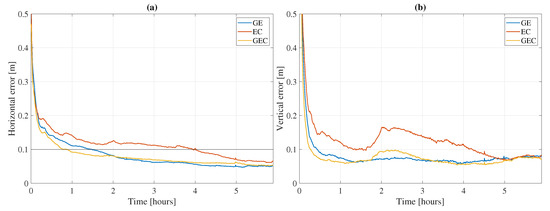
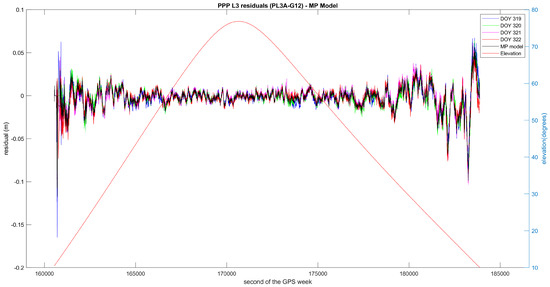
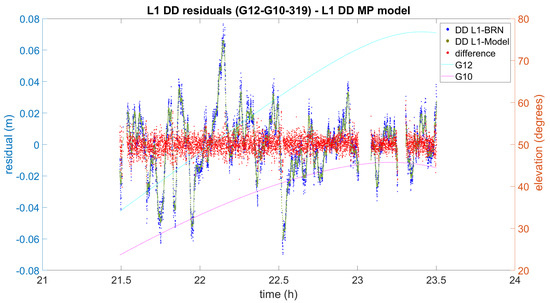
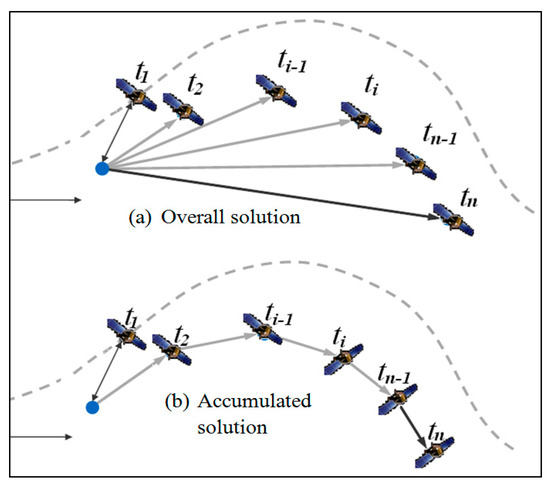
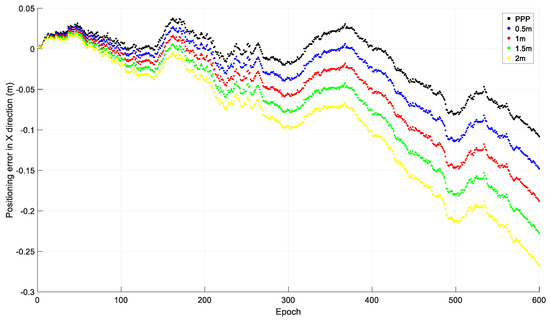
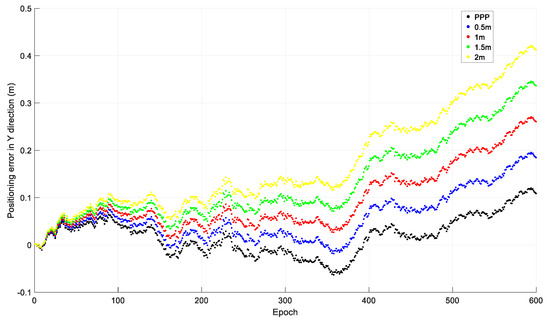
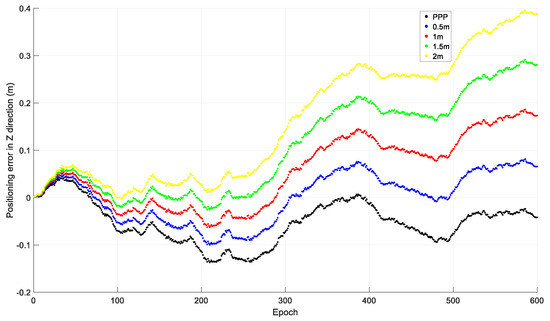
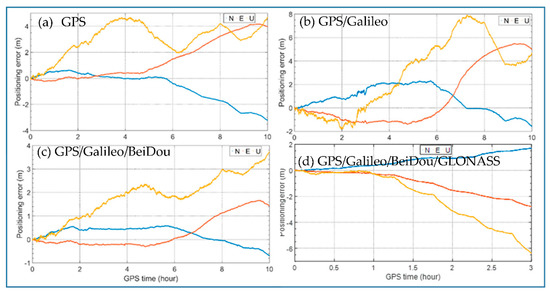
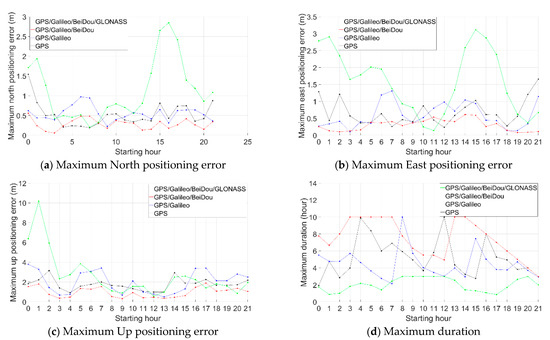
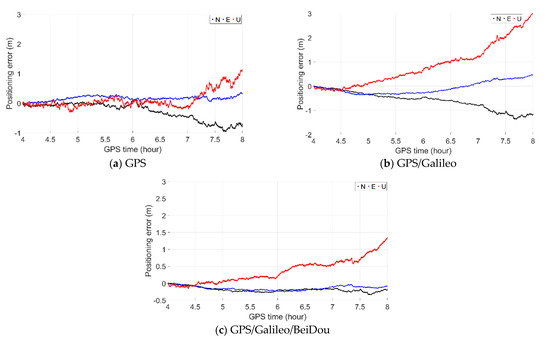
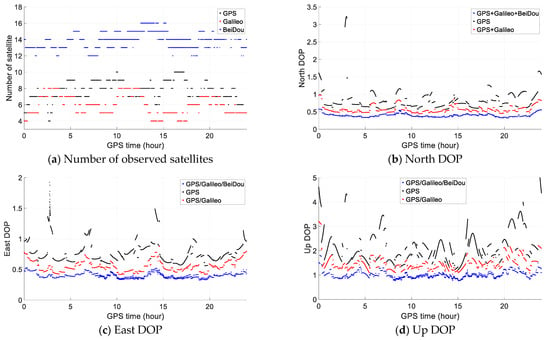
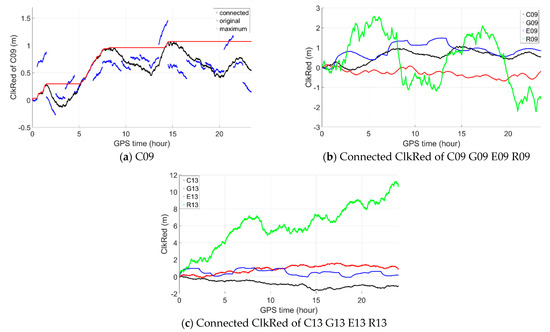
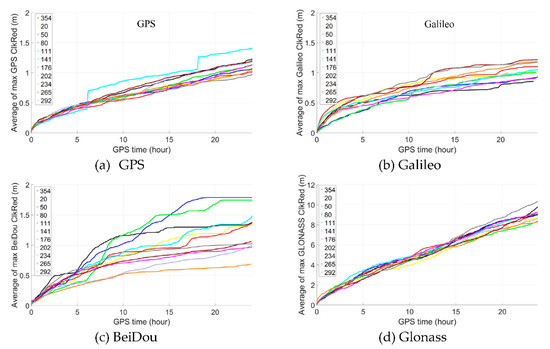
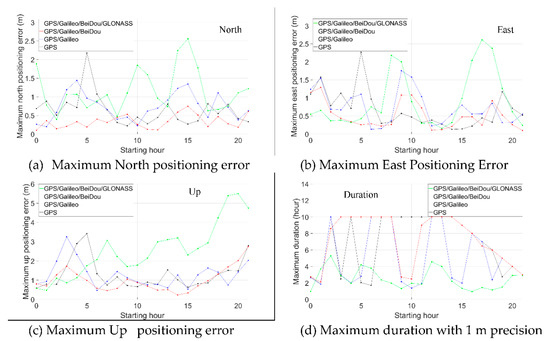
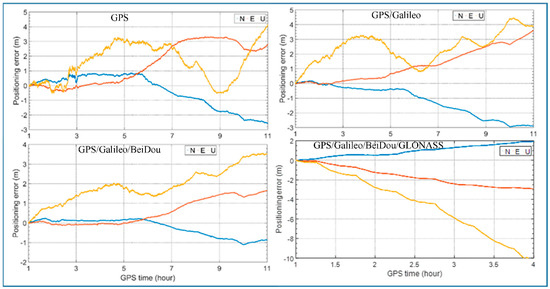
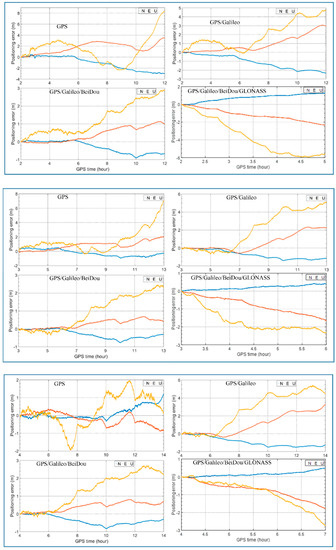
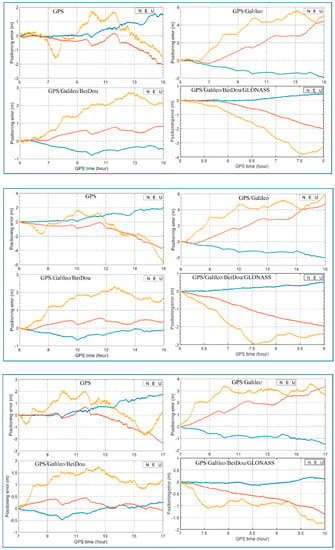
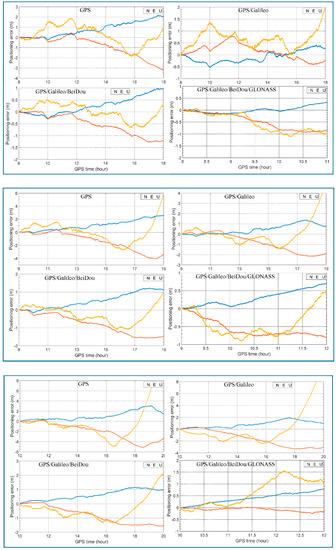
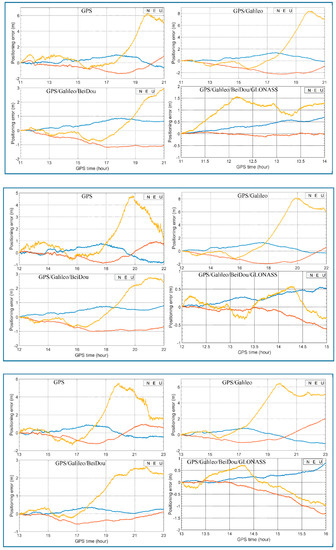
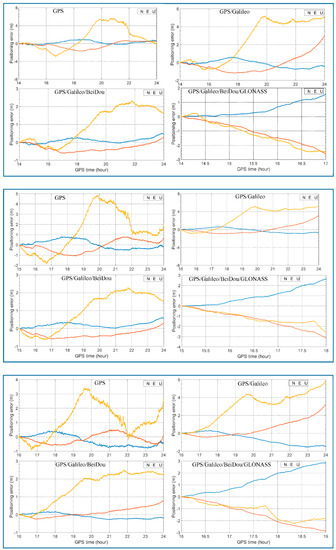
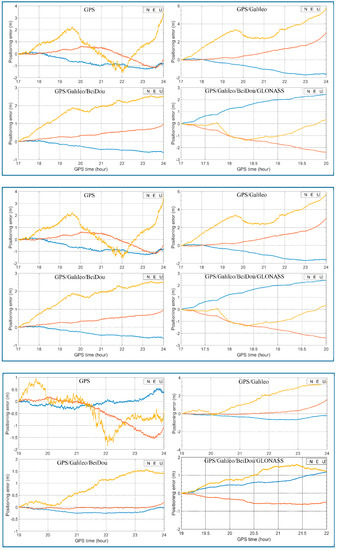
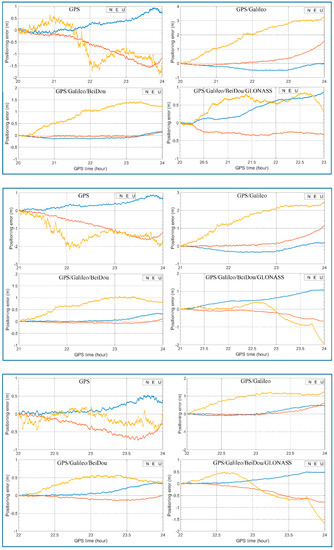
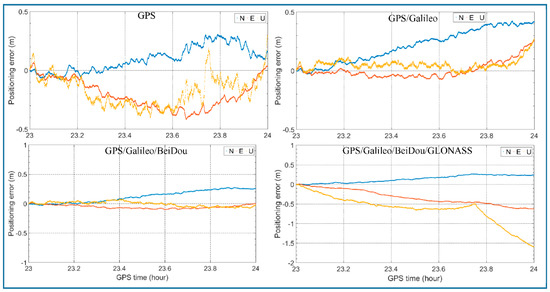
Global navigation satellite systems (GNSS) can attain centimeter level positioning accuracy, which is conventionally provided by real-time precise point positioning (PPP) and real-time kinematic (RTK) techniques. Corrections from the data center or the reference stations are required in these techniques to reduce various GNSS errors. The time-relative positioning approach differs from the traditional PPP and RTK in the sense that it does not require external real-time corrections. It computes the differences in positions of a single receiver at different epochs using phase observations. As the code observations are not used in this approach, its performance is not affected by the noise and multipath of code observations. High reliability is another advantage of time-relative precise positioning because the ambiguity resolution is not needed in this approach. Since the data link is not required in the method, this approach has been widely used in remote areas where wireless data link is not available. The main limitation of time-relative positioning is that its accuracy degrades over time between epochs because of the temporal variation of various errors. The application of the approach is usually limited to be within a time interval of less than 20 min. The purpose of this study was to increase the time interval of time-relative positioning and to extend the use of this method to applications with a longer time requirement, especially in remote areas without wireless communication. In this paper, the main error sources of the time-relative method are first analyzed in detail, and then the approach to improve the accumulated time relative positioning method is proposed. The performance of the proposed method is assessed using both static and dynamic observations with a duration as long as several hours. The experiments presented in this paper show that, among the four scenarios tested (i.e., GPS, GPS/Galileo, GPS/Galileo/BeiDou, and GPS/Galileo/BeiDou/GLONASS), GPS/Galileo/BeiDou performed best and GPS/Galileo/BeiDou/GLONASS performed worst. The maximum positioning errors were mostly within 0.5 m in the horizontal direction, even after three hours with GPS/Galileo/BeiDou. It is expected that the method could be used for positioning and navigation for as long as several hours with decimeter level horizontal accuracy in remote areas without wireless communication.
Full article
►▼
Show Figures
Open AccessArticle
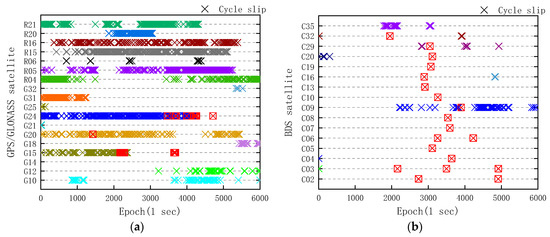
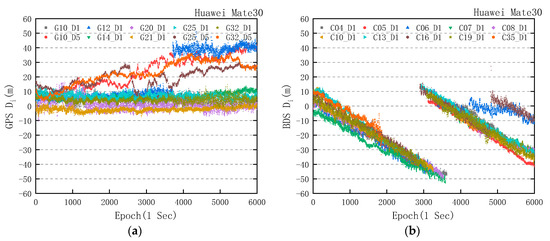
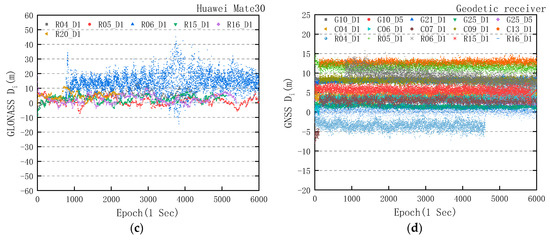
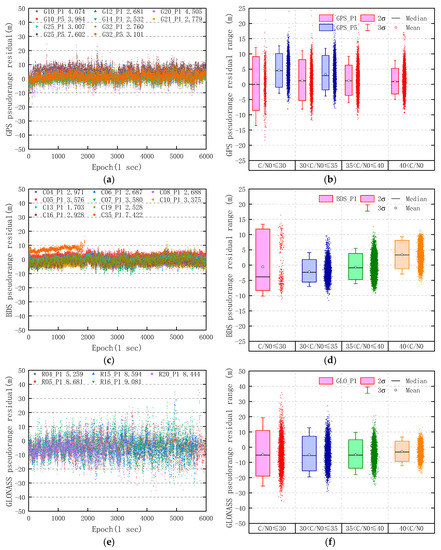
Study on Multi-GNSS Precise Point Positioning Performance with Adverse Effects of Satellite Signals on Android Smartphone
by
Hongyu Zhu, Linyuan Xia, Dongjin Wu, Jingchao Xia and Qianxia Li
Cited by 23 | Viewed by 4934
Abstract
The emergence of dual frequency global navigation satellite system (GNSS) chip actively promotes the progress of precise point positioning (PPP) technology in Android smartphones. However, some characteristics of GNSS signals on current smartphones still adversely affect the positioning accuracy of multi-GNSS PPP. In
[...] Read more.
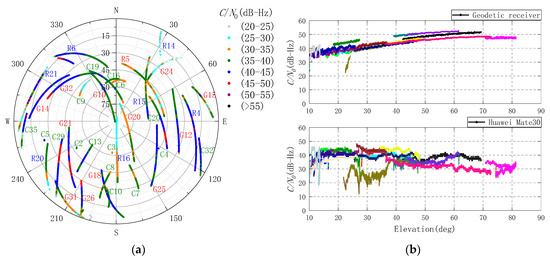
The emergence of dual frequency global navigation satellite system (GNSS) chip actively promotes the progress of precise point positioning (PPP) technology in Android smartphones. However, some characteristics of GNSS signals on current smartphones still adversely affect the positioning accuracy of multi-GNSS PPP. In order to reduce the adverse effects on positioning, this paper takes Huawei Mate30 as the experimental object and presents the analysis of multi-GNSS observations from the aspects of carrier-to-noise ratio, cycle slip, gradual accumulation of phase error, and pseudorange residual. Accordingly, we establish a multi-GNSS PPP mathematical model that is more suitable for GNSS observations from a smartphone. The stochastic model is composed of GNSS step function variances depending on carrier-to-noise ratio, and the robust Kalman filter is applied to parameter estimation. The multi-GNSS experimental results show that the proposed PPP method can significantly reduce the effect of poor satellite signal quality on positioning accuracy. Compared with the conventional PPP model, the root mean square (RMS) of GPS/BeiDou (BDS)/GLONASS static PPP horizontal and vertical errors in the initial 10 min decreased by 23.71% and 62.06%, respectively, and the horizontal positioning accuracy reached 10 cm within 100 min. Meanwhile, the kinematic PPP maximum three-dimensional positioning error of GPS/BDS/GLONASS decreased from 16.543 to 10.317 m.
Full article
►▼
Show Figures
Open AccessArticle
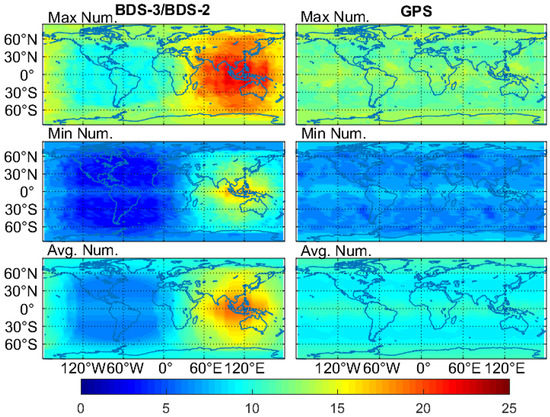
Performance Evaluation of Real-Time Precise Point Positioning with Both BDS-3 and BDS-2 Observations
by
Lin Pan, Xuanping Li, Wenkun Yu, Wujiao Dai, Cuilin Kuang, Jun Chen, Fade Chen and Pengfei Xia
Cited by 19 | Viewed by 4546
Abstract
For time-critical precise applications, one popular technology is the real-time precise point positioning (PPP). In recent years, there has been a rapid development in the BeiDou Navigation Satellite System (BDS), and the constellation of global BDS (BDS-3) has been fully deployed. In addition
[...] Read more.
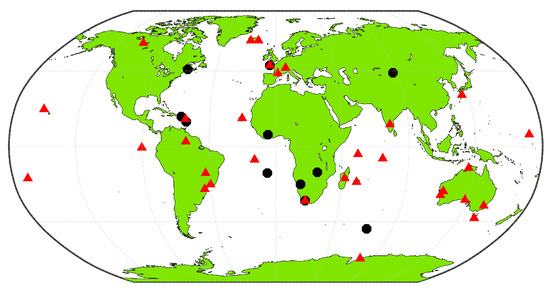
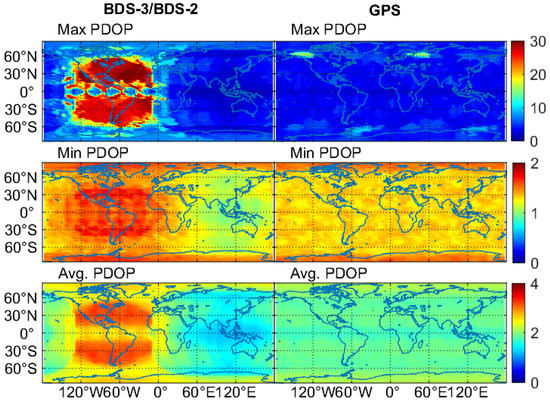
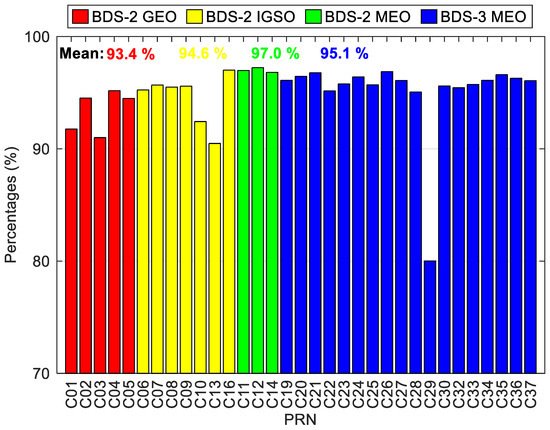
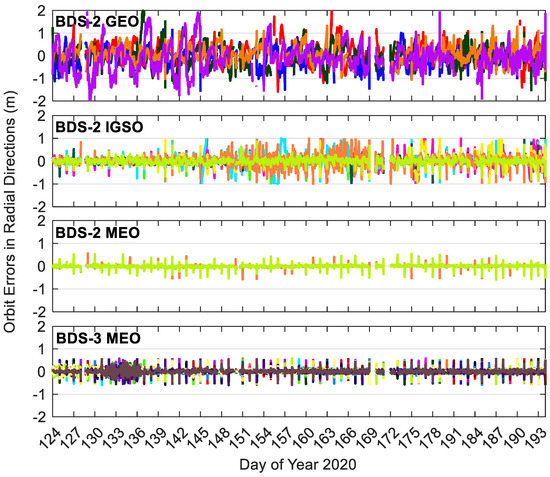
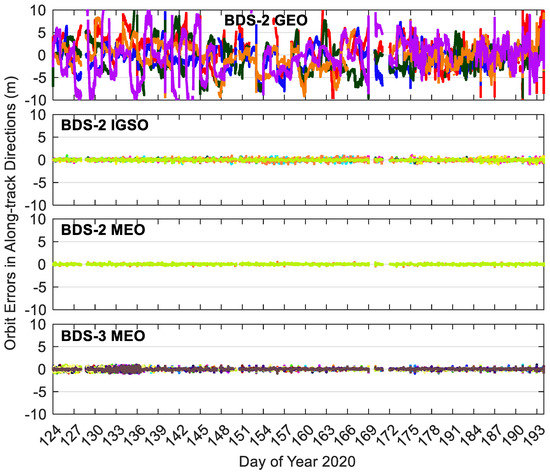
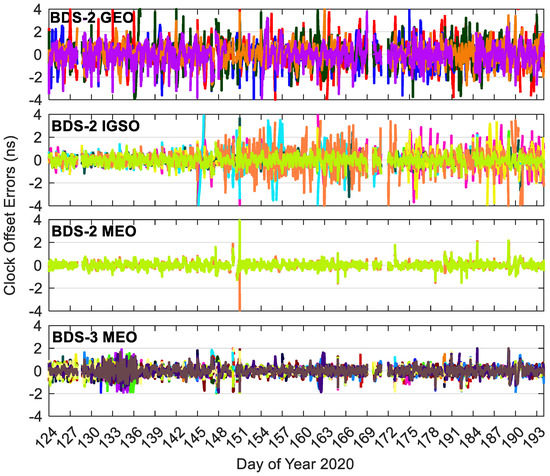
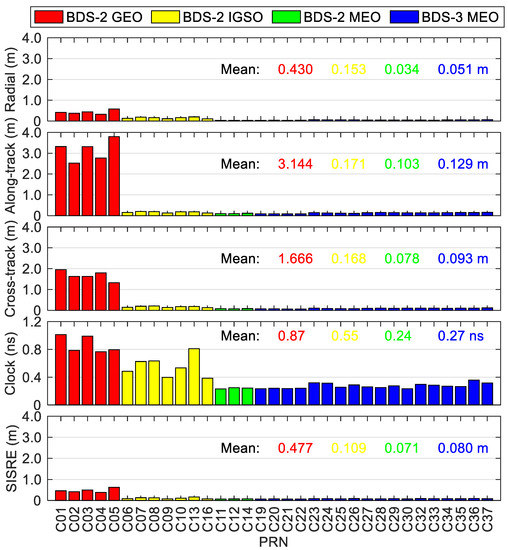
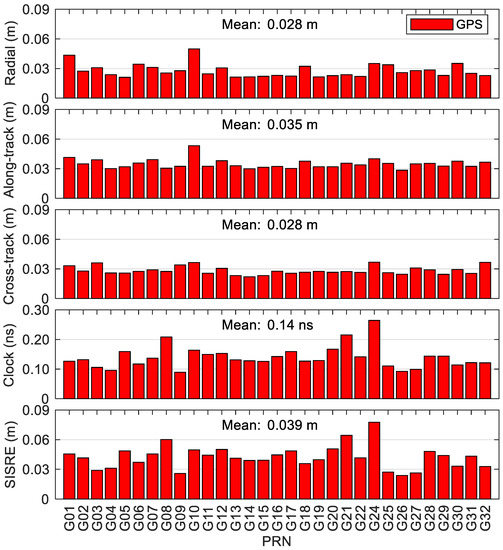
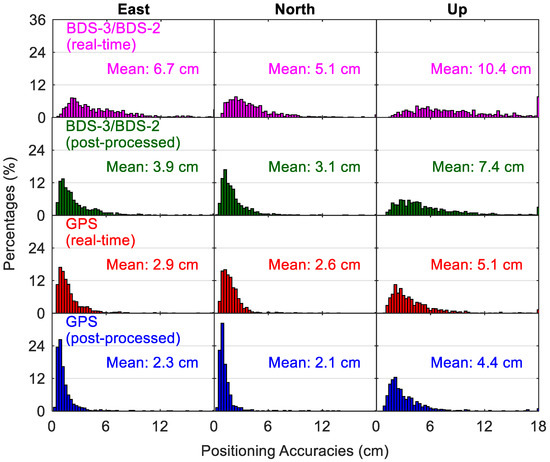
For time-critical precise applications, one popular technology is the real-time precise point positioning (PPP). In recent years, there has been a rapid development in the BeiDou Navigation Satellite System (BDS), and the constellation of global BDS (BDS-3) has been fully deployed. In addition to the regional BDS (BDS-2) constellation, the real-time stream CLK93 has started to support the BDS-3 constellation, indicating that the real-time PPP processing involving BDS-3 observations is feasible. In this study, the global positioning performance of real-time PPP with BDS-3/BDS-2 observations is initially evaluated using the datasets from 147 stations. In the east, north and upward directions, positioning accuracy of 1.8, 1.2 and 2.5 cm in the static mode, and of 6.7, 5.1 and 10.4 cm in the kinematic mode can be achieved for the BDS-3/BDS-2 real-time PPP, respectively, while the corresponding convergence time with a threshold of 10 cm is 32.9, 23.7 and 32.8 min, and 66.9, 42.9 and 69.1 min in the two modes in the three directions, respectively. To complete this, the availability of BDS-3/BDS-2 constellations, the quality of BDS-3/BDS-2 real-time precise satellite products, and the BDS-3/BDS-2 post-processed PPP solutions are also analyzed. For comparison, the results for the GPS are also presented.
Full article
►▼
Show Figures
Open AccessArticle
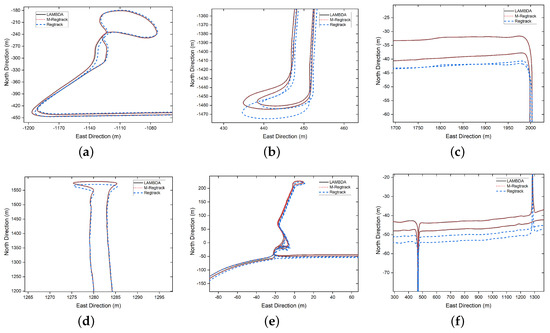
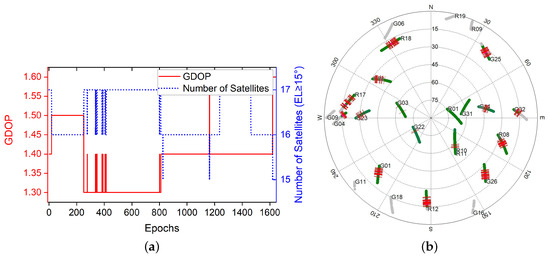
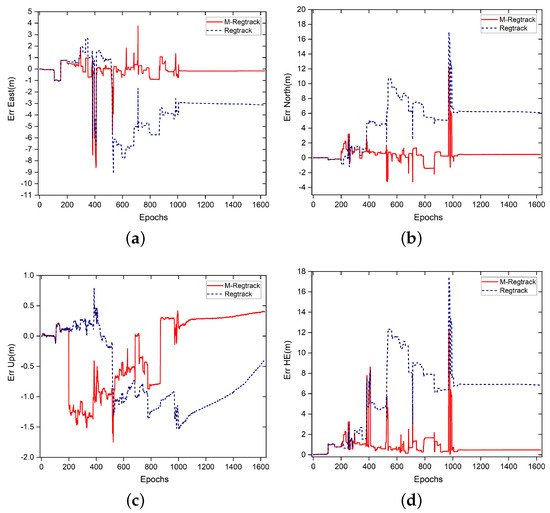
An Improved Relative GNSS Tracking Method Utilizing Single Frequency Receivers
by
Wenhao Yang, Yue Liu and Fanming Liu
Cited by 11 | Viewed by 3625
Abstract
The Global Navigation Satellite Systems (GNSS) becomes the primary choice for device localization in outdoor situations. At the same time, many applications do not require precise absolute Earth coordinates, but instead, inferring the geometric configuration information of the constituent nodes in the system
[...] Read more.
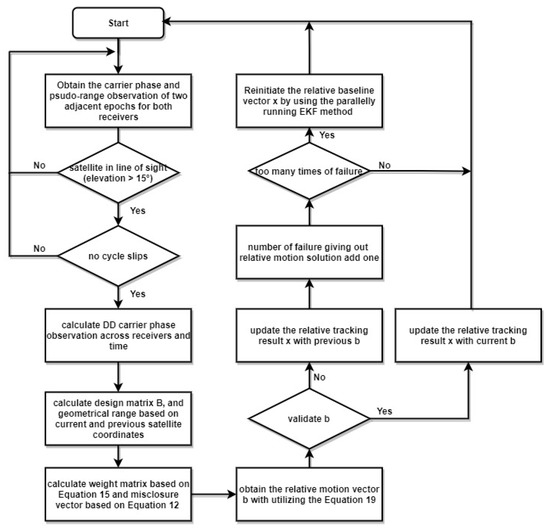
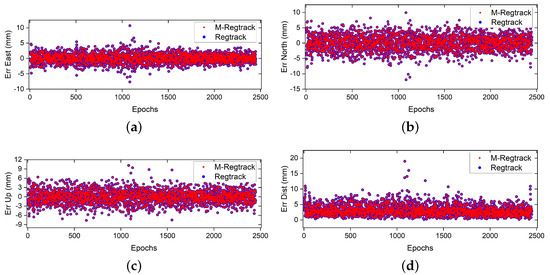
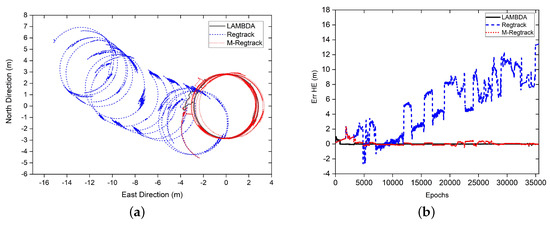
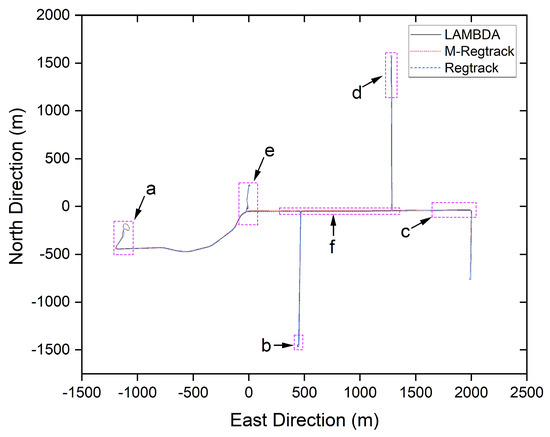
The Global Navigation Satellite Systems (GNSS) becomes the primary choice for device localization in outdoor situations. At the same time, many applications do not require precise absolute Earth coordinates, but instead, inferring the geometric configuration information of the constituent nodes in the system by relative positioning. The Real-Time Kinematic (RTK) technique shows its efficiency and accuracy in calculating the relative position. However, when the cycle slips occur, the RTK method may take a long time to obtain a fixed ambiguity value, and the positioning result will be a “float” solution with a low meter accuracy. The novel method presented in this paper is based on the Relative GNSS Tracking Algorithm (Regtrack). It calculates the changes in the relative baseline between two receivers without an ambiguity estimation. The dead reckoning method is used to give out the relative baseline solution while a parallel running Extended Kalman Filter (EKF) method reinitiates the relative baseline when too many validation failures happen. We conducted both static and kinematic tests to assess the performance of the new methodology. The experimental results show that the proposed strategy can give accurate millimeter-scale solutions of relative motion vectors in adjacent two epochs. The relative baseline solution can be sub-decimeter level with or without the base station is holding static. In the meantime, when the initial tracking point and base station coordinates are precisely obtained, the tracking result error can be only 40 cm away from the ground truth after a 25 min drive test in an urban environment. The efficiency test shows that the proposed method can be a real-time method, the time that calculates one epoch of measurement data is no more than 80 ms and is less than 10 ms for best results. The novel method can be used as a more robust and accurate ambiguity free tracking approach for outdoor applications.
Full article
►▼
Show Figures












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}