1. Introduction
The stochastic model of observations describes the dispersion of the measurement random errors (also referred to as measurement noise). Together with a functional model, expressing deterministic relationships between observations and unknown parameters, it forms the mathematical model of observation. The stochastic model is expressed by a variance-covariance (VC) matrix that defines the precision of observations through variance elements and their physical correlations through covariance elements. It is an essential element in the parameter estimation process for almost all measurement systems wherein the minimum variance estimator condition is assumed. Furthermore, the stochastic model is of particular importance in the case of Global Navigation Satellite Systems (GNSS) data adjustment, for which precise definition of a fully propagated VC matrix is difficult to obtain due to a multi-dimensional dependency of GNSS observations quality and the complex correlations existing between the measurements. In recent years, the joint processing of multi-system observations from Global Positioning System (GPS), GLONASS, Galileo and BeiDou (referred to as Multi-GNSS solution) has become the expected standard in precision positioning applications. The stochastic properties of the Multi-GNSS solution can vary significantly, which increase the importance of the correct definition of the VC matrix. Nevertheless, adopting homoscedastic or simplified models of variance and neglecting various correlations between the GNSS signals leads to a reduction in the positioning solution accuracy and reliability. These are crucial issues in relative positioning models using carrier-phase observations, in which correct integer carrier-phase ambiguity resolution (AR) is a necessary condition for precise positioning, since it defines the shape and size of the search space for the ambiguity estimation and contributes to the significance level and power of the validation tests. Unfortunately, nowadays the most common approach is the simplified definition of the stochastic model, which ignores the differences in accuracy and correlation between different GNSS systems.
The existing approaches to model the GNSS observation variance components (mostly adapted from the GPS system) use, among others, the following methods: satellite elevation-dependent variance exponential function [
1,
2] and cosecant variance function [
3,
4]; Signal-to-Noise Ratio (SNR)-dependent variance model [
5,
6,
7], Carrier-to-Noise density Ratio (C/N
)-based model [
8,
9] with extensions: SIGMA-
[
10,
11] and SIGMA-
[
12] models; the ionospheric scintillation-dependent variance model [
13]; the receiver tracking error-dependent model (e.g., variance function based on tracking jitters) [
13,
14]; multipath-dependent variance function [
15]; User Ranging Accuracy (URA)-dependent variance function [
16,
17].
The variance models, as mentioned above, are mainly empirical models based on fitting a function that approximates the variance depending on the selected parameter. Among the methods for determining empirical stochastic models of GNSS observation noise, we can distinguish two main strategies: methods based on modeling observation residues from a zero-length baseline or a short baseline [
18,
19,
20] and methods using combinations of both types of measurements [
21,
22]. An alternative to empirical determination of the VC matrix elements are iterative methods based on the Least-Square Adjustment residuals analysis. These methods use Variance Component Estimation (VCE) algorithms by means of: Minimum Norm Quadratic Unbiased Estimation (MINQUE) [
23,
24,
25], Best Invariant Quadratic Unbiased Estimation (BIQUE) [
26,
27] and Least-Squares Variance Component Estimation (LS-VCE) [
28,
29]. The iterative methods require an initial VC structure to be assumed, often accomplished using variance functions as mentioned above (e.g., exponential function [
30] or cosecant function [
4]).
Among positioning models using multi-frequency observations or observations from multiple receivers, functional models are most often based on linear combinations of multi-epoch observations (e.g., single or double differences, ionosphere- or geometry-free combinations). In that case, in addition to mathematical correlations [
31], the observations physical correlations are also apparent and should be taken into account to accurately capture the variances of observations and the covariances between them in a VC matrix. The physical correlations can be divided into: temporal correlations, mainly due to the atmosphere, multipath and the receiver itself [
18,
32,
33,
34,
35]; spatial- (between channels) and cross-correlation between observation types (e.g., code and carrier-phase, between frequency) [
36,
37,
38]. Determination of correlation parameters, depending on the type of correlation is based on following methods: exponential models [
32,
39], tropospheric turbulence theory-based models [
40,
41] and autoregressive moving average (AMRA) modeling of observation residuals [
7,
42]. Moreover, the VCE algorithms are also applied to study the covariance components of the GNSS observation VC matrix [
43,
44,
45,
46].
The models, additionally extended with the characteristics of residual errors (e.g., atmospheric residual errors), constitute a separate group of stochastic models. They are based on the assumption that residual observation errors not included in the functional model can be equivalently captured by the fully populated VC matrix [
47]. These models, mainly dedicated to kinematic positioning, use a priori values of individual errors [
48,
49,
50], the residual observations from previous epochs [
51,
52] or the atmospheric correction errors estimation determined from the network of reference stations [
53].
Stochastic models for GPS and GLONASS measurements have been analyzed from the very beginning of their use [
1,
54,
55,
56,
57,
58]. The authors of these analyses, apart from developing the observation variance empirical models, pointed to the lack of cross-correlation between code and phase observations and the existence of significant correlations between the same type of observations at two frequencies (e.g., [
56,
59]). The conducted analyses also show significant time-correlations for the codes C1, P1 and P2 [
18].
Apart from the numerous works related to the refinement of stochastic models for GPS and GLONASS observations, research on stochastic models of state-of-the-art Galileo and BeiDou systems has also been conducted in the recent years. These studies include analyses of single systems (e.g., variance of dual-frequency BeiDou B1/B2 code and phase observations [
60], variance-covariance components as well as cross- and time-correlation parameters for dual-frequency [
61] and triple-frequency BeiDou signals [
4], a combination of BeiDou-2 and BeiDou-3 stochastic modeling [
62], noise characteristic for five Galileo signals [
63]), combined dual systems: GPS/Galileo [
22], GPS/BeiDou [
64], GPS/IRNSS [
65] and triple systems GPS/Galileo/BeiDou [
66,
67,
68] solutions as well as Multi-GNSS system solutions (e.g., [
69,
70]).
The analysis of the influence of various stochastic models on the results of the positioning model solution leads to the conclusion that their improvement (e.g., by changing the variance function or the diagonal VC matrix to the fully populated) affects: (a) the accuracy of the unknowns estimation—improvement in the accuracy of the horizontal baseline components at mm-level and height component up to a few centimeters [
71,
72]; (b) carrier-phase integer ambiguity resolution—improvement of AR success rate in GPS L1/L2 geometry-based relative positioning model up to 25% [
30], improving the efficiency of the AR validation test up to 10% in the case of false alarm probability using ratio test [
4,
19]; (c) overestimation of the precision—neglecting the cross-correlation leads to a too optimistic estimate of the baseline solution precision [
32,
37,
73].
All the above-mentioned scientific works and research results lead to the conclusion that the stochastic model is one of the crucial elements in the GNSS observations processing, and its correct definition has a significant impact on the quality of the obtained results. The previous analyses for multi-system solutions did not cover all aspects of stochastic modeling (determination of variance, cross- and time-correlation specific to a particular system/signal/satellite block) for each systems and its impact on the model solution (ambiguity resolution and positioning accuracy). The lack of uniform parameters for all GNSS systems results that one of the approaches taken in multi-system positioning is making the approximate assumptions for stochastic observation parameters or adapting parameters from the GPS system [
74,
75,
76].
The aim of this work was to develop an individual, empirical stochastic model of all Mutli-GNSS code and carrier-phase observations in the form of a fully populated VC matrix that takes into account the physical correlations between measurements. The primary contributions of this paper are summarized as follows:
The empirical stochastic model was determined individually for the GPS, GLONASS, Galileo and BeiDou systems for each signal and individual blocks of satellites using a 4th-degree Carrier-to-Noise density Ratio-dependent model.
The developed empirical stochastic model was compared with the theoretical model describing the nominal precision of GNSS receiver performance due to thermal noise.
The impact of the stochastic model elements on the positioning solution was examined based on the relative carrier-phase model for a very short baseline and Kalman Filter estimation method. The analysis considered the impact of including: different variance models, cross- and time-correlation characteristics and specific parameters for different satellite blocks.
The comprehensive analysis of the positioning accuracy and ambiguity resolution results was performed for various GNSS systems and signals combinations using the developed empirical stochastic model and the standard elevation-dependent model.
The ultimate goal of the presented analyses was to improve the quality of the multi-system and multi-frequency solution by refining the empirical stochastic model of Multi-GNSS measurements.
The paper is organized as follows. In
Section 2 we present GNSS measurement noise characteristic and its theoretical impact on observation quality. In
Section 3 the empirical stochastic modeling methodology is presented, which allows to estimate variance and covariance components based on zero-length and very short baseline observations. In
Section 4 the positioning model used to evaluate the developed empirical stochastic model is described. The applied estimation method using a modified Kalman Filter, considering the time-correlation of observations, is also outlined. In
Section 5 the data set, results of stochastic modeling, the impacts on AR and positioning solutions for different scenarios are analyzed. Finally, in
Section 6, the summary and concluding remarks are made.
The following symbols and notation for the analyzed systems and signals were used in the paper: for GNSS systems the following abbreviations were used: G for GPS, R for GLONASS, E for Galileo and C for BeiDou; observation codes for pseudorange and carrier-phase measurements were adopted according to RINEX 3.04 format [
77]: GPS—C1C/L1C for L1 C/A, C1W/L1W for L1 P(Y), C2W/L2W for L2 P(Y), C2L/L2L for L2 CL, C5Q/L5Q for L5(Q); GLONASS—C1C/L1C for L1 C/A, C1P/L1P for L1 P, C2C/L2C for L2 C/A, C2P/L2P for L2 P, C3Q/L3Q for L3(Q); Galileo—C1C/L1C for E1 OS(C), C5Q/L5Q for E5a(Q), C7Q/L7Q for E5b(Q), C8Q/L8Q for E5ab AltBOC(Q), C6C/L6C for E6(C); BeiDou—C2I/L2I for B1-2(I), C7I/L7I for B2b(I), C6I/L6I for B3(I). The analyses performed for individual satellite blocks distinguished the following blocks and types: GPS Block IIR (type A with legacy antenna panel and type B with improved antenna panel [
78]), IIR-M, IIF; GLONASS M and K1; Galileo IOV and FOC; BeiDou-2 GEO, IGSO and MEO.
2. GNSS Measurement Noise
GNSS measurements, like all other observables, are burdened with measurement errors. Most of the measurement errors, with the highest value, such as the orbital and clock errors or atmospheric delays, are included in the observation functional model and taken into account in a deterministic manner. The rest of the errors can be included in the observation model using the laws of probability as stochastic quantities [
56]. Then, their random behavior is assumed, and their values and mutual correlations are described as variances and covariances in the observation VC matrix. A significant portion of these errors is highly dependent on the GNSS receiver itself, its components performance, and the finite precision of measurements. This section presents the theoretical relationship between the signal strength, the measurement noise and the nominal precision of GNSS receiver performance.
From the point of view of electrical signals processing, measurement random errors can be treated as thermal noise caused by random electrons movement in any of the electronic components of the GNSS receiver system with a temperature above 0 K [
9]. Assuming thermal noise is white noise (with constant power spectral density) with a Gaussian distribution, its power for typical temperature
K and GPS L1 signal bandwidth
MHz can be expressed as [
79]:
where
is the Boltzmann constant. This results in a noise power of approx.
W (
dBW in decibels relative to one watt) or noise power spectral density of
dBW/Hz expressed per unit of bandwidth. However, the noise power value alone does not yield sufficient information about the signal quality and the resulting measurement errors. The key to the signal quality analysis is the received signal power, and its ratio to the noise power (referred to as SNR) when it is related to a given bandwidth (
) or C/N
if referred to the power per unit of bandwidth (
).
Table 1 summarizes a simplified example of received signal power budget and thermal noise for C/A GPS observation with the minimum transmitted signal power of about
W. The received signal power on the earth’s surface can be calculated after taking into account: the power path loss due to the spreading of the total signal energy over the entire surface area, satellite antenna gain caused by the amplification of the signal power towards the Earth in relation to the isotropic antenna, atmospheric attenuation and receiver antenna gain taking into account effective area of an omnidirectional receive antenna and gain of patch antenna relative to the isotropic. The presented values refer to the worst-case scenario, for a satellite elevation of about
, for which the values of satellite signal spread angle of
and gain of the receiver antenna related to the isotropic one of
dBic were adopted [
7,
79,
80].
The numbers in
Table 1 for a very low elevation satellite illustrate the lower values of the received signal power that can be acquired. This signal power relates directly to the minimum received signal power that is a guaranteed minimum received power level, as specified in the Interface Control Document (ICD) for each of the GNSS systems, but may vary slightly depending on the signal power budget assumptions. Based on the minimum received signal power, compiled in [
81], the nominal (theoretical) C/N
for GNSS signals were determined.
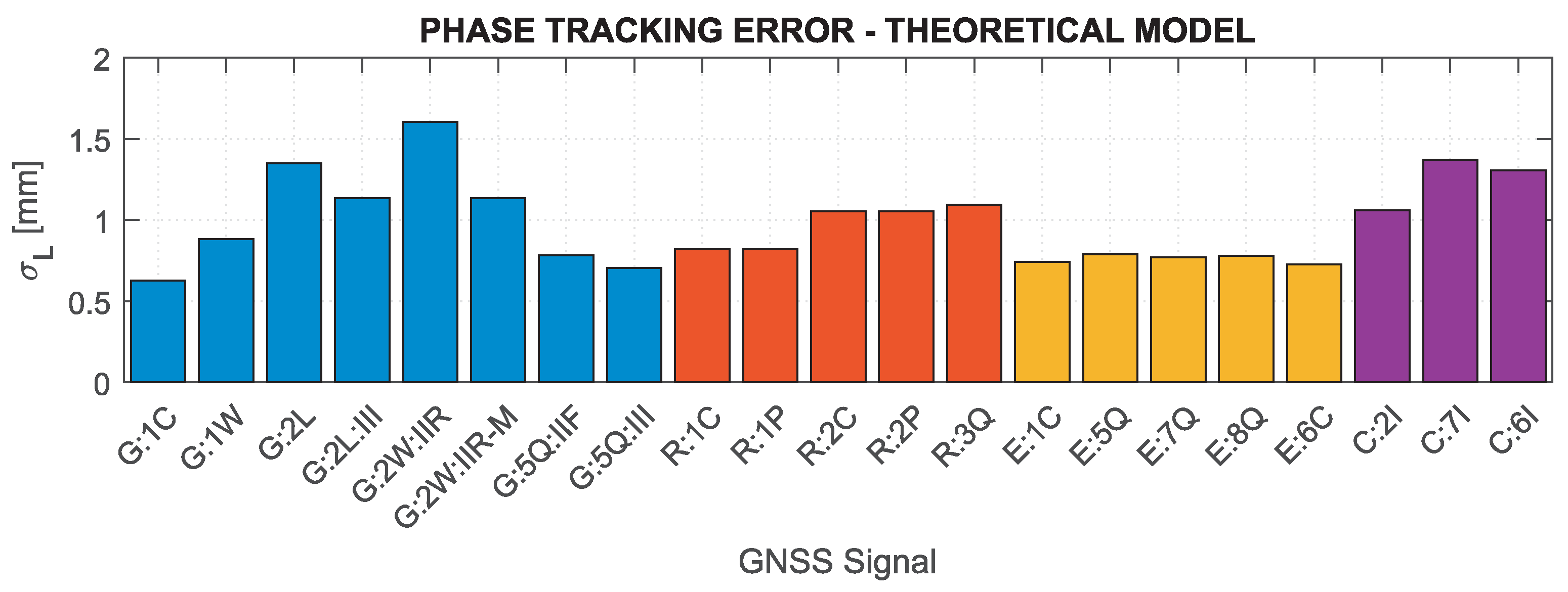
Figure 1 shows the C/N
for individual systems and signals analyzed in the study, distinguishing between individual satellite blocks for GPS signals. Note that if the information on the power of a given signal was not publicly available (as in the case of GLONASS P-code or BeiDou 6I), values for other signals of the given system were adopted for the calculation. Based on the presented values, it can be concluded that the nominal signal quality differs significantly between systems, reaching the lowest values for GPS 2L, 2W and BeiDou signals, which may considerably affect the GNSS receiver performance.
The SNR parameter describes the relative magnitude of the measurement noise and is therefore directly related to the precision of the code and carrier-phase observations. The nominal precision of GNSS receiver performance due to thermal noise can be calculated as tracking error in Delay Lock Loop (DLL) for code and in Phase Lock Loop (PLL) for carrier-phase measurements, given by [
79]:
where:
and
are tracking error variance for code and carrier-phase respectively,
and
are code and phase tracking loop bandwidth in Hz,
and
are DLL and PLL predetection integration intervals in seconds and
d is the dimensionless correlator spacing normalized with respect to one Pseudorandom Noise (PRN) code chip. The C/N
in these equations must be expressed in units of ratio-Hz.
Based on the above formulas, assuming the C/N
determined for the minimum received signal power and the characteristics of the tracking loops for the Septentrio PolaRx5 receiver, which was used in the measurement experiment (
Hz,
Hz,
s,
s,
), the nominal errors of GNSS measurements were determined.
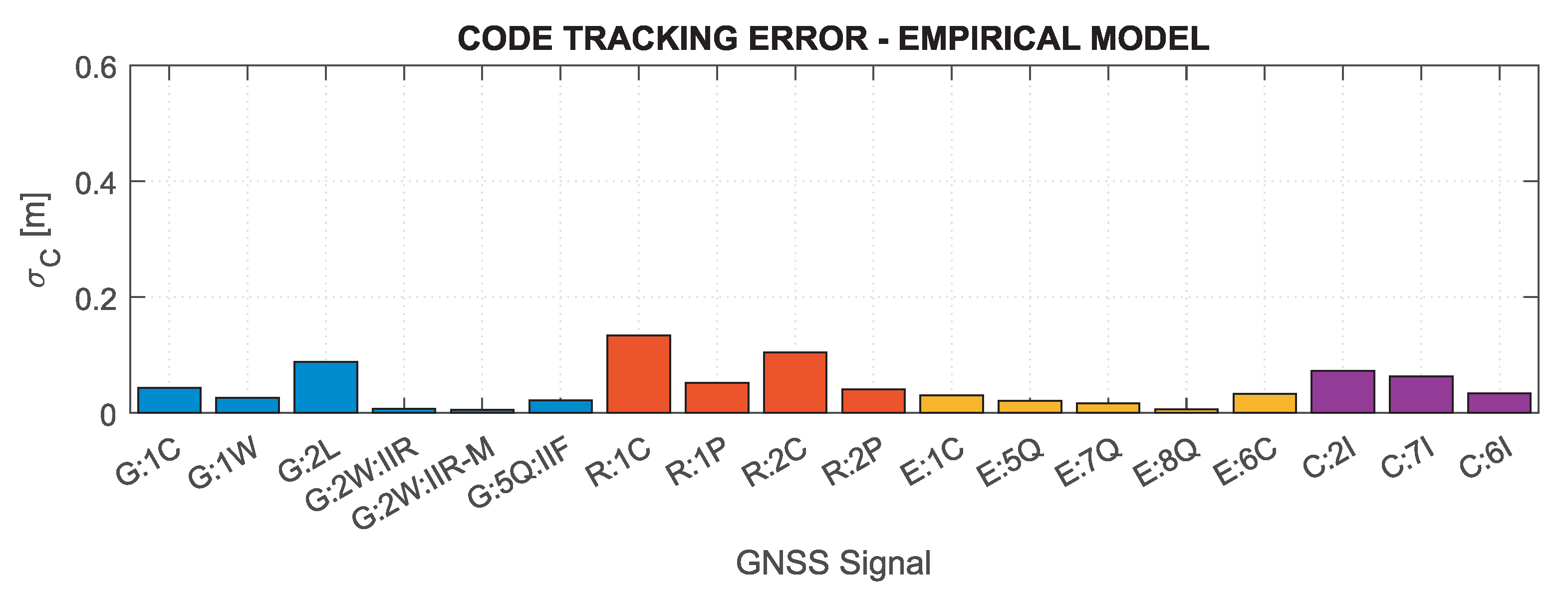
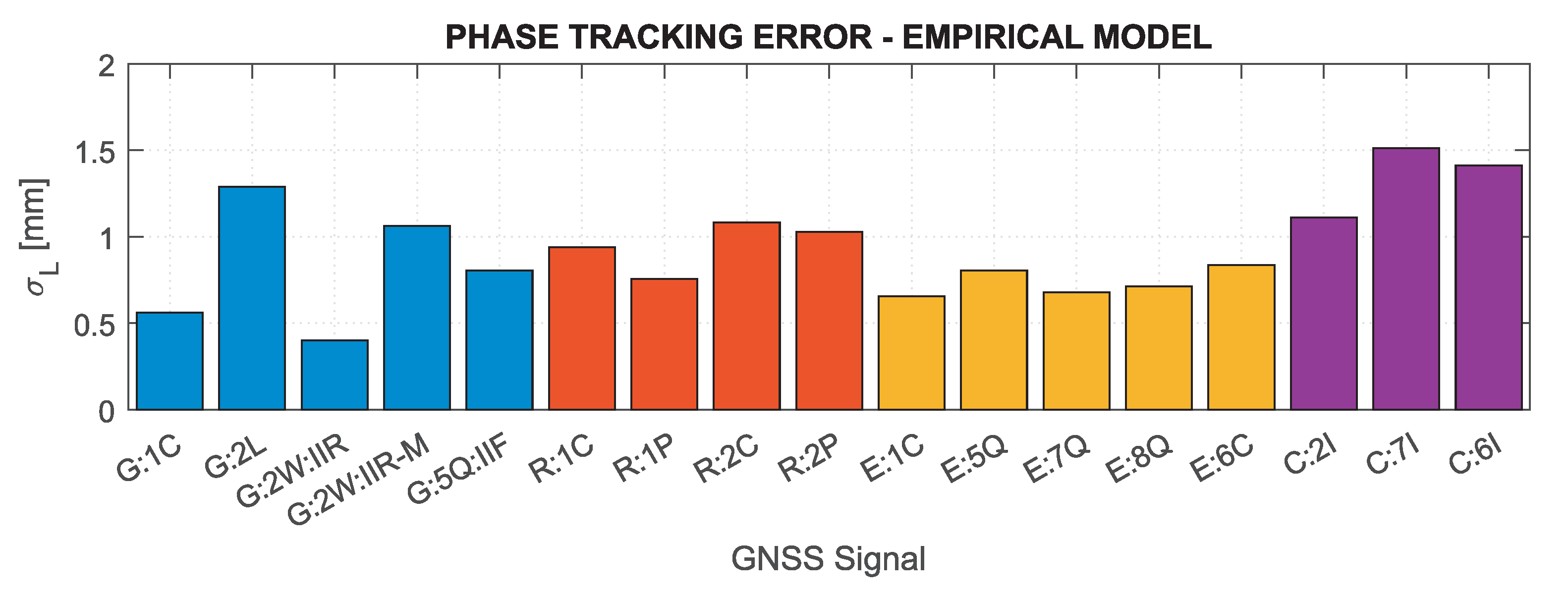
Figure 2 and
Figure 3 show theoretical tracking errors for code and phase observations, respectively, for signals corresponding to those shown in
Figure 1. The carrier phase observation errors accurately reflect the variability of C/N
—the lower the value, the greater the error. For code observations, high error values of GPS 2L and GLONASS 1C and 2C signals are distinguished. This is mainly caused by the narrow nominal bandwidth of these signals, which is generally smaller than the actual transmission bandwidth [
81].
Based on the results in
Figure 1,
Figure 2 and
Figure 3, it can be concluded that the nominal measurement noise of individual observations varies significantly, and, assuming the same observation accuracy for different systems and signals, may cause significant inaccuracies of the realistic noise characteristics in the stochastic model.
3. Empirical Stochastic Modeling Methodology
In
Section 2 we showed that the nominal measurement noise could be significantly different for different types of GNSS signals. To determine the actual value of the measurement noise and to create a realistic stochastic model of observations, the empirical stochastic modeling method based on the observation residuals was used. The empirical models of observation variance, as well as the time- and cross-correlation parameters, were derived using double-differenced (DD) and triple-differenced (TD) measurements from short baseline (SB) and zero-length baseline (ZB) conducted by two receivers of the same type. The time series of the mentioned measurement combinations allow to precisely separate the influence of particular correlations from each other. Thus, the SB TD combination was used to model the dependence of the carrier-phase and code variances on the C/N
parameter. The time- and cross-correlation were determined based on the ZB DD observation time series analysis, as this combination is not burdened with the influence of multipath, does not de-correlate the measurements and allows to determine both parameters directly. This section presents the methodology of determination of individual parameters of the empirical stochastic model, the accuracy analysis of the created variances functions and the values of correlation coefficients based on daily observations for all systems and signals.
The simplified code (
C) and carrier-phase (
L) observation equations in units of length for a receiver
a and a satellite
i generalized for frequency
f are given by:
where:
R is the geometric satellite-receiver range, which includes satellite orbit error, satellite and receiver antenna phase center errors and carrier-phase wind-up bias,
and
are troposphere and ionosphere delays,
and
are hardware biases for a receiver (with a subscript
a) and a satellite (with a superscript
i) for code and phase measurements respectively,
and
are code and phase multipath,
is a satellite or receiver clock error,
N denotes integer carrier-phase ambiguity and
and
are code and carrier-phase random errors. All quantities, except for clock errors given in seconds and ambiguity given in carrier wave cycles, are expressed in units of length. Additionally,
c is the speed of light, and
denotes the carrier wavelength. Assuming the same atmospheric delays affect observations from two receivers for SB and ZB setup, the DD code and carrier-phase residuals can be calculated by subtracting from the observations the double differences of geometric distance and carrier-phase ambiguity, which can be easily determined, if the coordinates of both receivers are known with high accuracy. The TD residuals, derived as the time difference of two DD for consecutive observation epochs (
and
), also significantly reduce the multipath error as it has almost the same value for two close epochs (e.g., for 1 Hz data).
Table 2 shows the calculation formula, the expectation (
) and dispersion (
) values for two linear residuals combination (DD and TD) of carrier-phase observations for the short and zero-length baseline, where
is the phase residual at epoch
and symbol
denotes the double-differencing operator. This example illustrates only phase observation residuals, but the formulas are the same for the code residuals (except for the carrier-phase ambiguity which is not existent in code observations). Formulas are presented in a generalized form (omitting the indexes of satellites and receivers) for intra-system differences (no differences are computed between two GNSS systems). It is assumed that two receivers of the same type are used to create differences, thus the measurement noise affecting observations from both receivers have the same magnitude. This prerequisition allows to eliminate the inter-frequency bias occurring in the differences computed using observation on a different frequency (as in GLONASS system, which uses Frequency Division Multiple Access (FDMA)).
The dispersion of observation residuals of linear combinations represents the measurement noise with variance
for phase observation and takes into account two types of correlations: time-correlation
which affects the TD dispersion when time differencing is performed and cross-correlation
between observations from two receivers [
21,
22]. For the SB setup
can be neglected; however, for the ZB, when two receivers use the same antenna, the large part of the noise is the same due to the common antenna Low-Noise Amplifier (LNA) [
45,
82], which results in a significant cross-correlation of measurement from the receivers. When the observations from both receivers are burdened with common LNA noise, it is eliminated in the observation difference, significantly reducing the dispersion.
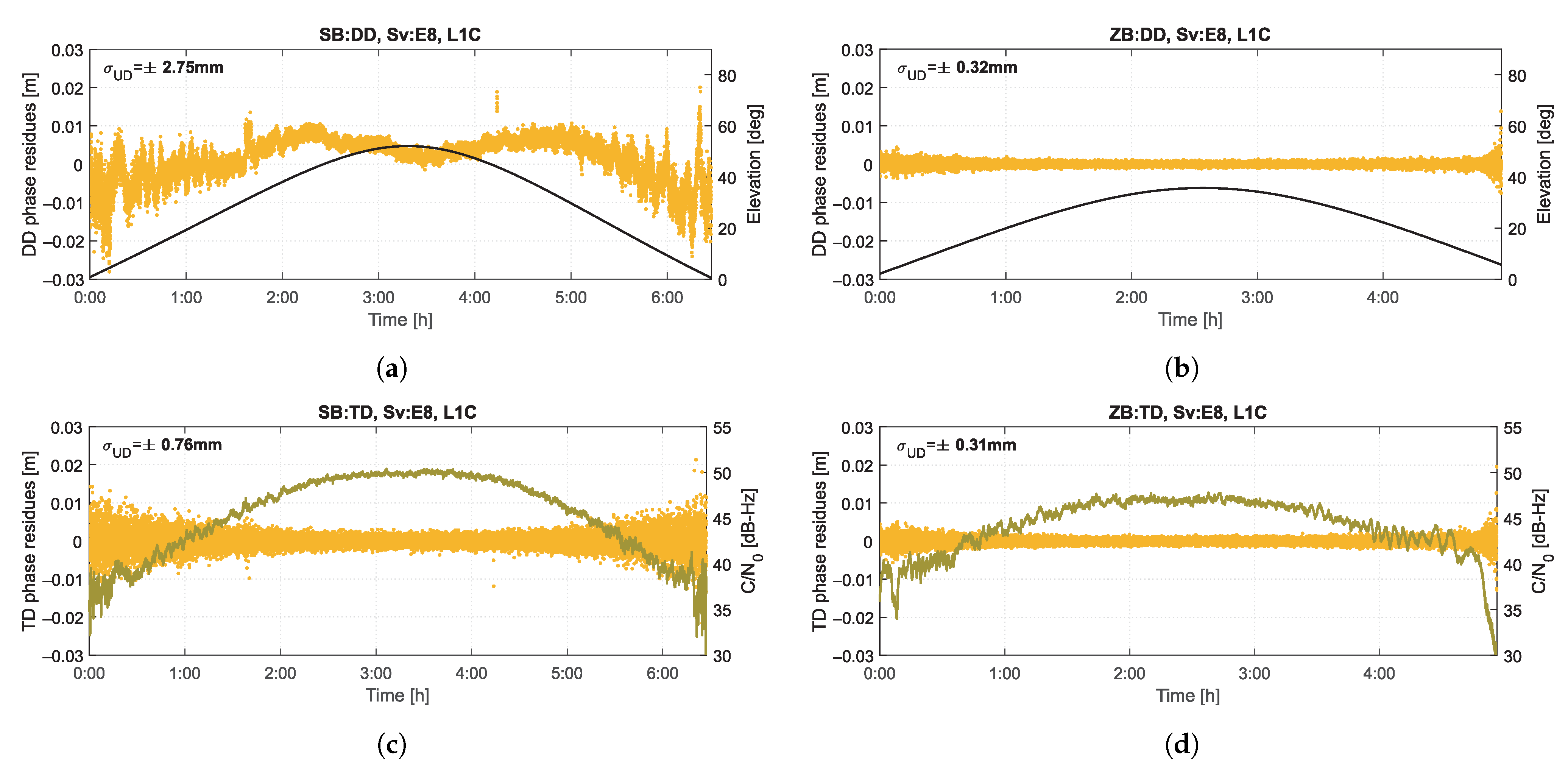
Figure 4 presents the time series of phase residuals for four observation combinations listed in
Table 2, for exemplary one of the processed signal—Galileo L1C from the Sv8 satellite. The satellite with the highest elevation for a given epoch was used as a reference satellite, so it can be assumed that its noise was constant and its impact on the presented results was minimized. The SB length was
m. Based on these series, one can see an apparent multipath effect in the DD combination for SB, which is eliminated for the TD combination and ZB observations. There is also a clear dependence on the satellite elevation (marked on top graphs for DD) and the C/N
parameter (marked on bottom graphs for TD). The magnitude of the measurement noise clearly decreases for observations from the ZB, which is confirmed by the standard deviation of the time series, calculated for a uniform undifferenced (UD) level, amounting to
mm,
mm and
mm, respectively for SB TD, ZB DD and ZB TD combinations. This confirms the existence of significant correlations that must be taken into account to correctly determine the measurement noise variance based on the presented combinations of observations.
In order to determine the variance of carrier-phase and code observations, the SB TD combination was used. The created empirical model of variance is based on fitting a function that approximates the variance depending on the C/N
parameter. The advantage of choosing the C/N
parameter, unlike the elevation angle, is a close theoretical relationship with the measurement noise (expressed by Equations (
2) and (
3)) and the possibility of including the actual received signal power. The relationship with the elevation is not direct [
80]. Most of the modern precise GNSS receivers output C/N
. It is then available to users via RINEX files or RTCM and NMEA data streams. Unfortunately, for some types of receivers the parameter is unavailable.
Based on a general form of tracking error, Equations (
2) and (
3) can be represented as:
where: coefficients
and
are related to tracking loop bandwidths, predetection integration intervals and correlator spacing separately for code and phase measurements; C/N
is expressed in dB-Hz. The developed empirical variance model uses a modified Equation (
6) which extends to the form of a
degree series, in the form:
Function (
7) is fitted to the standard deviation of the SB TD code and phase observations residuals determined for the adopted time series segments, and the coefficients
are determined by the Least-Squares Method. To assess the variance of the observation noise (
and
), the time-correlation of observation residues should be taken into account (according to
Table 2)—the method of determining
is described in the further part of this subsection.
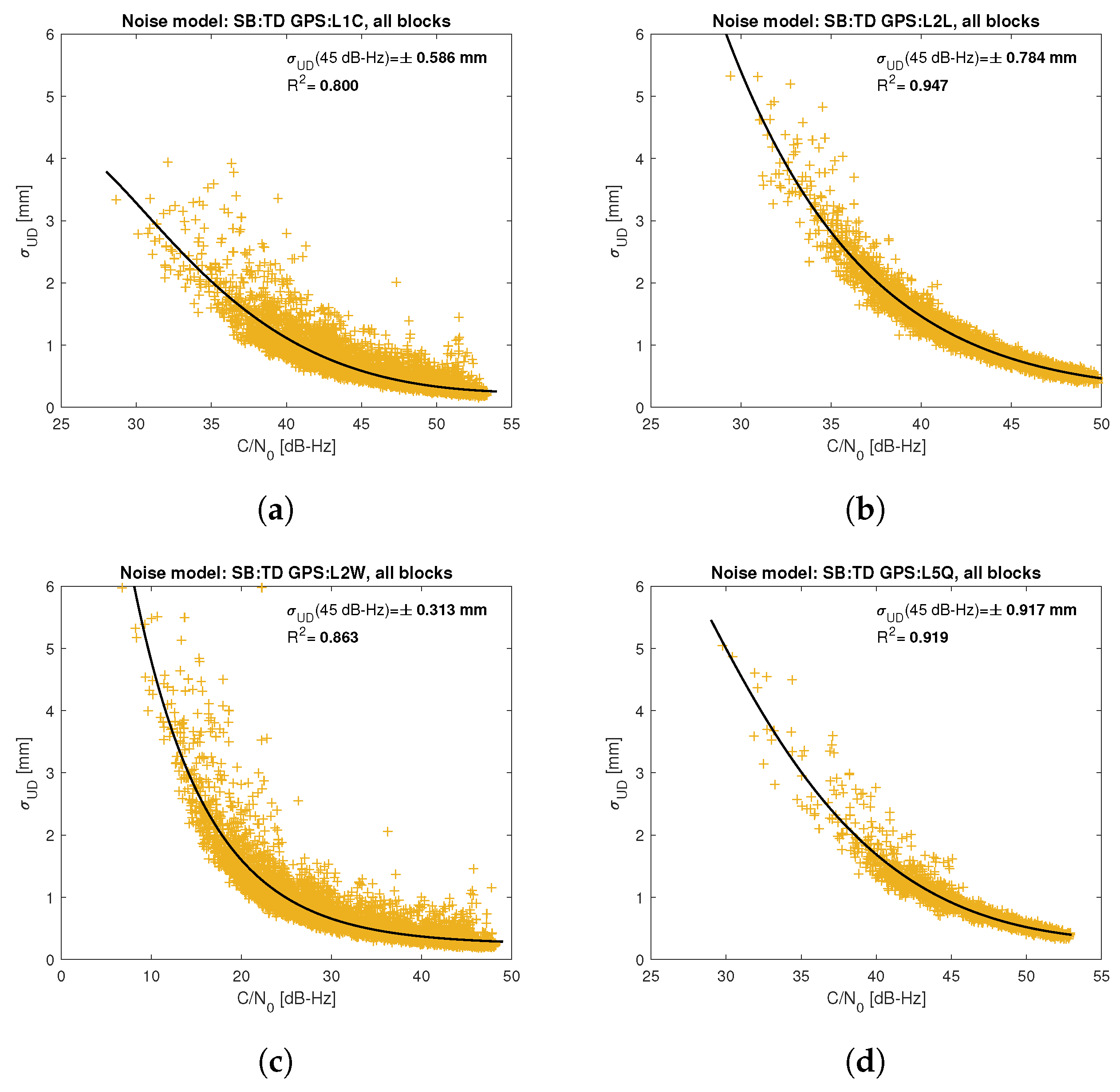
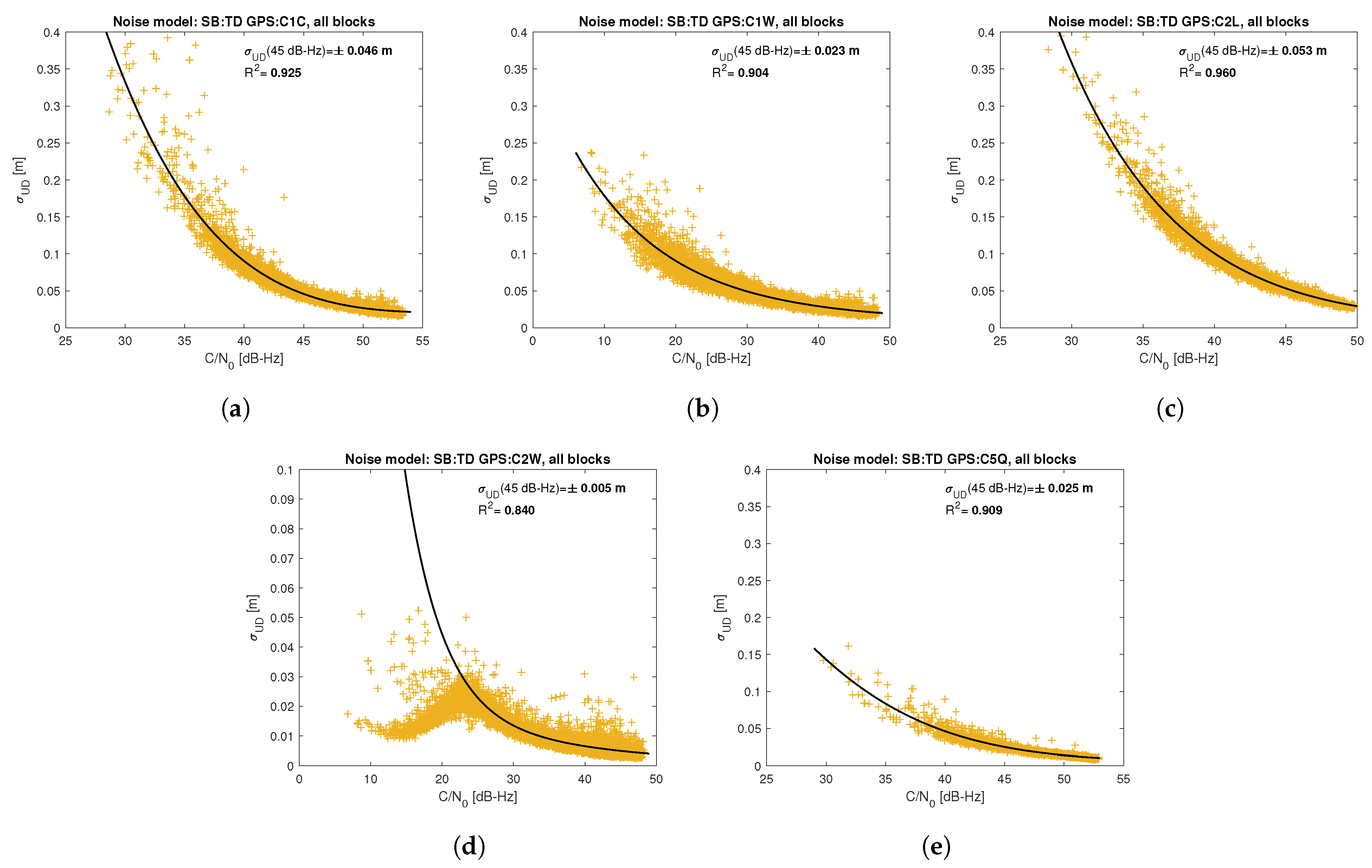
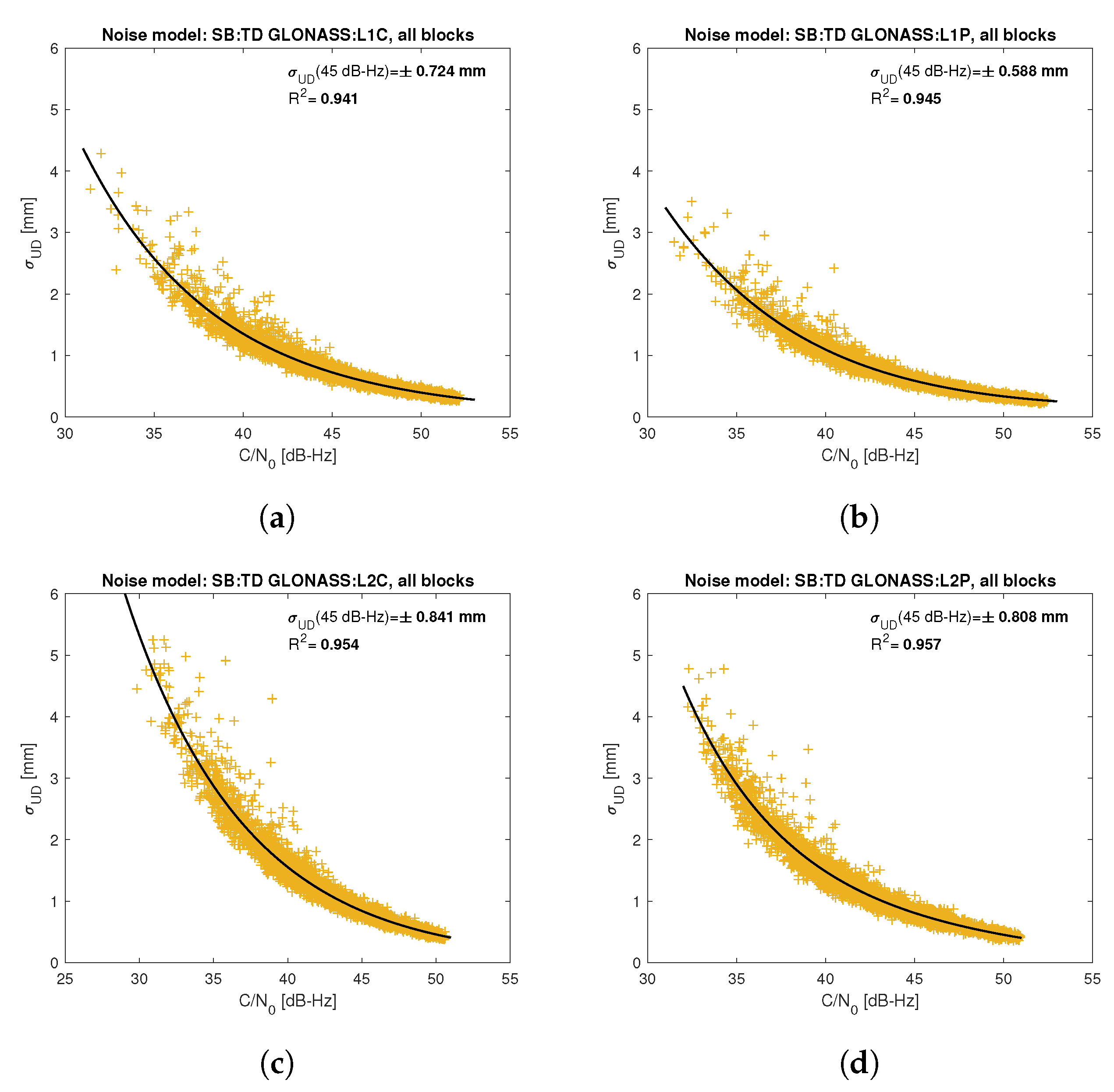
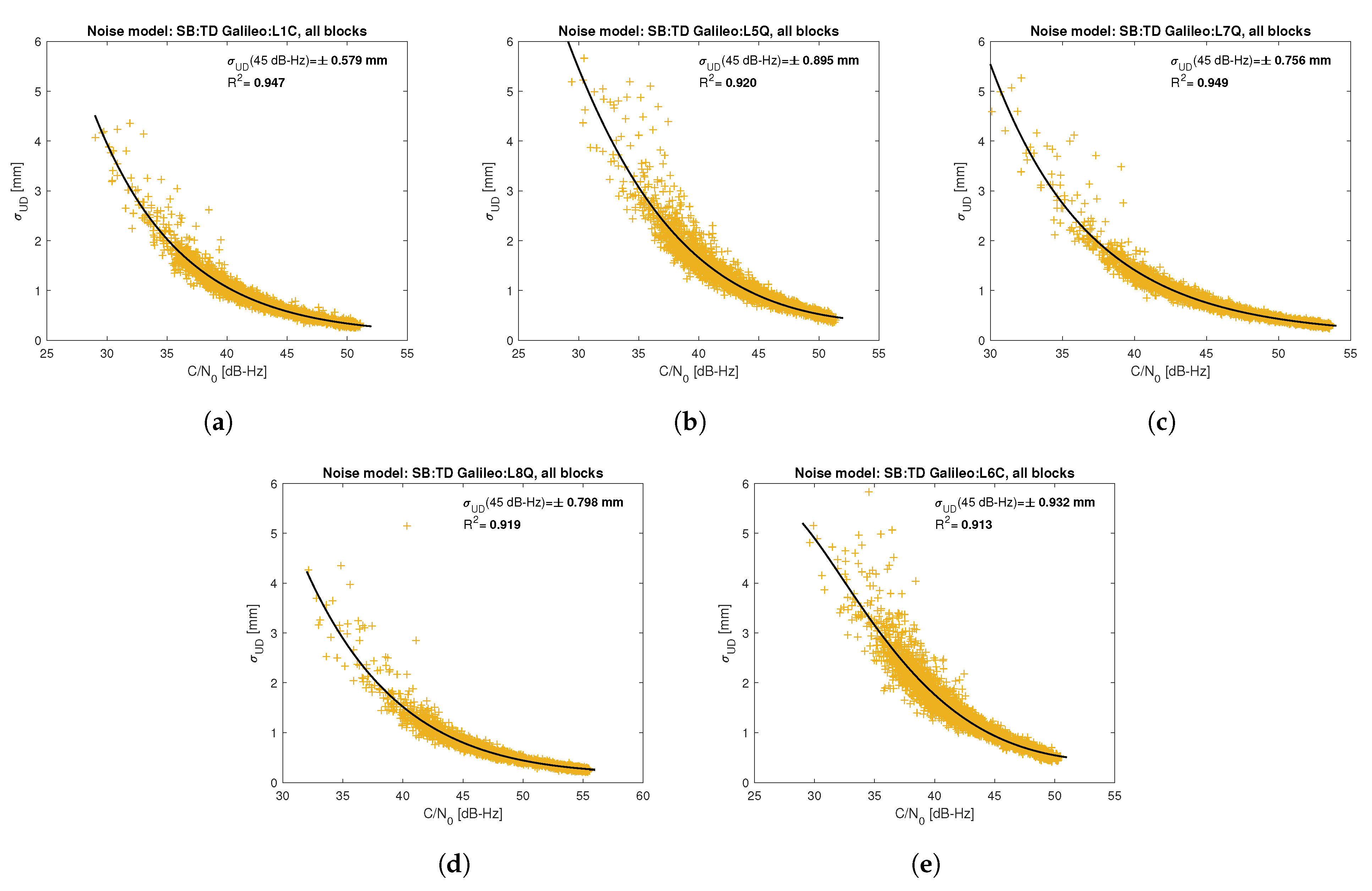
Figure 5,
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10,
Figure 11 and
Figure 12 show the results of the approximation of the standard deviation of SB TD code and phase observations for all analyzed GNSS signals using the function (
7). Standard deviations were determined for daily observations with an interval of 1 Hz for 120-s observation segments and recalculated to a UD level. The argument of the approximating function C/N
was calculated as a mean value of carrier-to-noise density ratios of the reference satellite and the second satellite in a pair. A detailed description of the data used can be found in
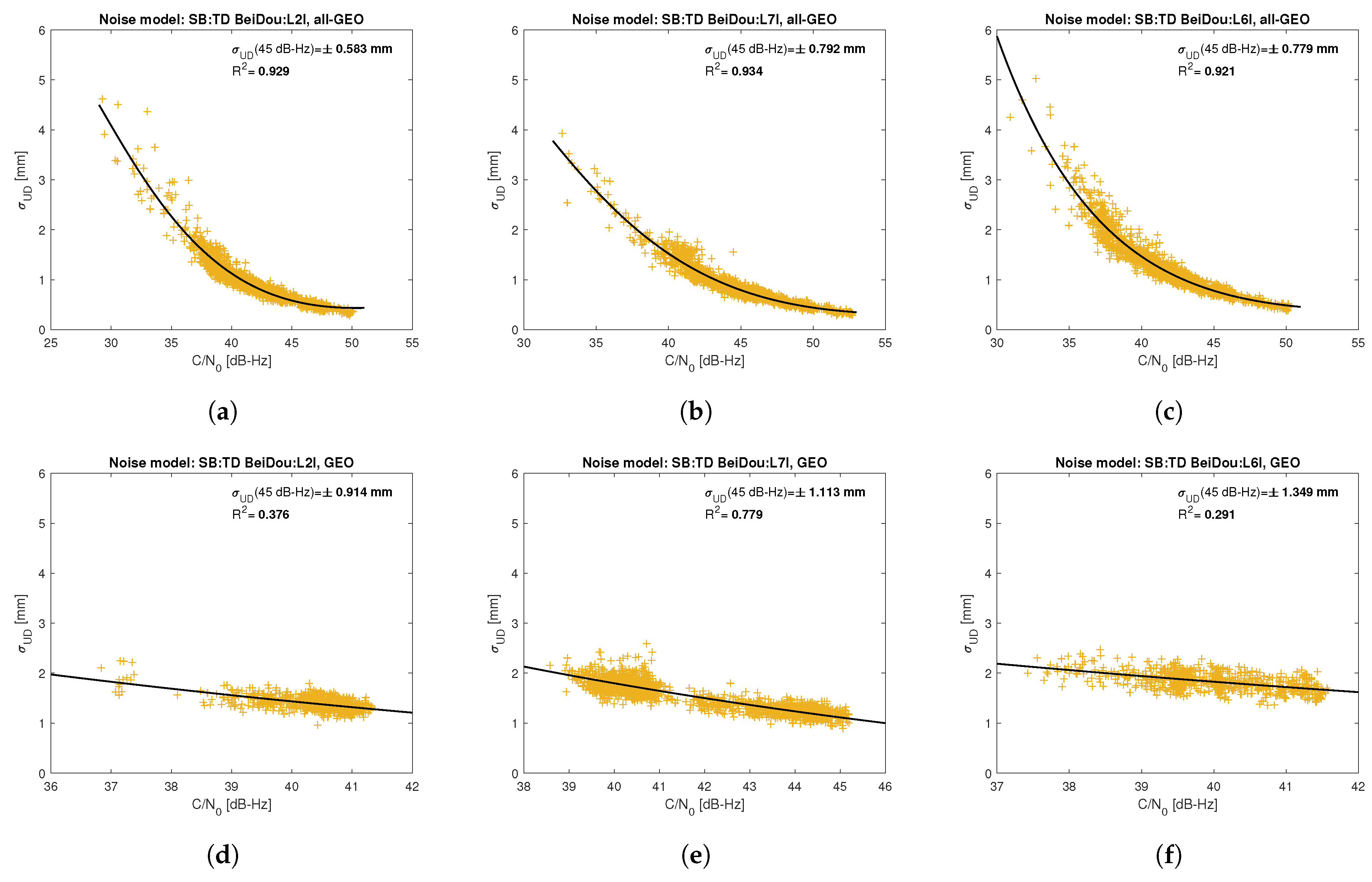
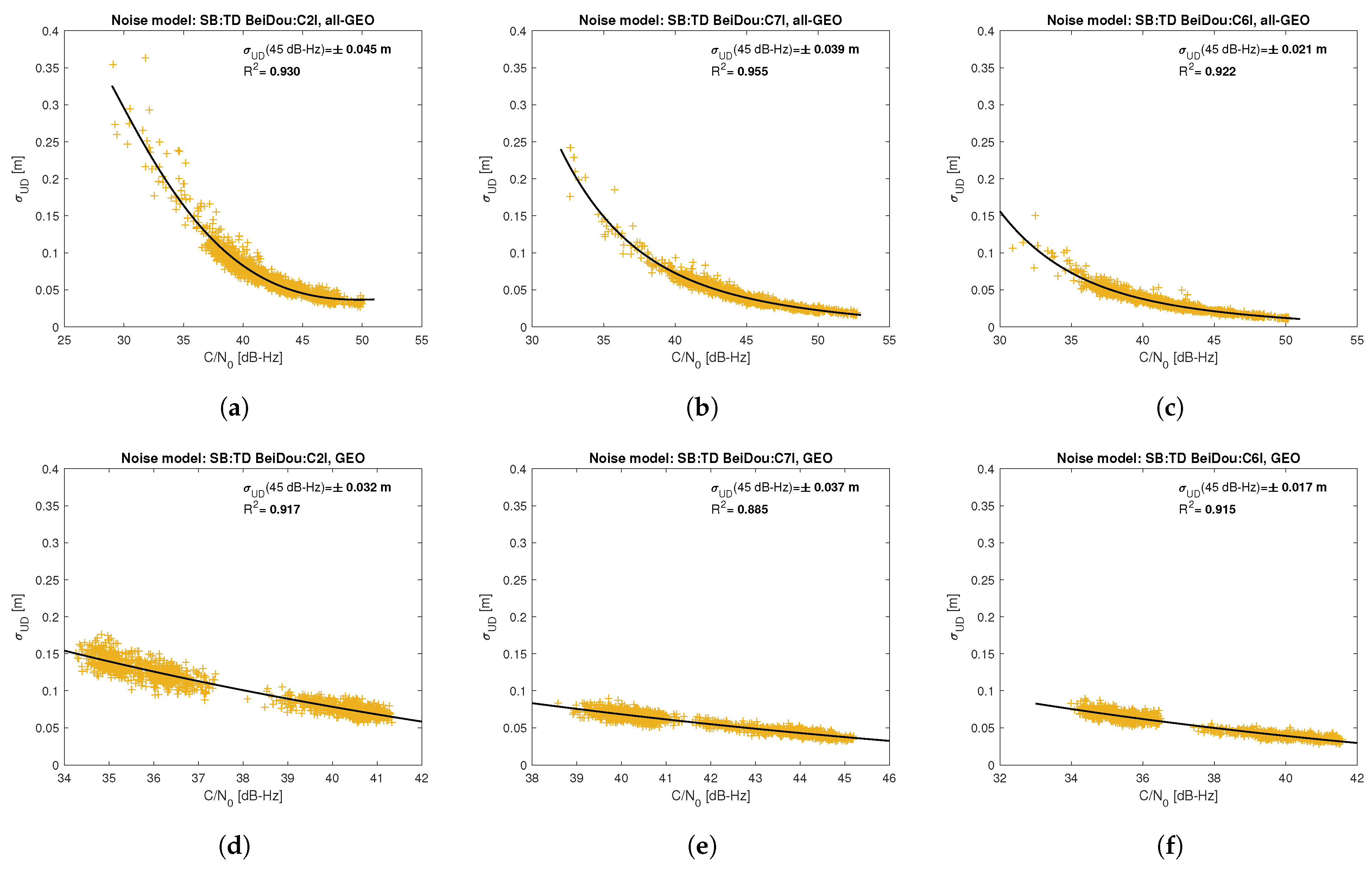
Section 5. Aforementioned Figures present the modeling results for all observations for a given signal with no distinction between satellite blocks. The exception is the BeiDou system, for which the
degree model was adopted for observations from geostationary (GEO) satellites.
Based on the presented figures, it can be concluded that the selected approximating function accurately reflects the dependence of measurement noise standard deviation on the C/N
parameter. The Figures also show the coefficient of determination
, which is within the range of 0.80–0.96, proving that the model replicates the empirical standard deviation values very well. The only exception is the model for GPS C2W code observations, for which the standard deviation of the noise has a non-standard pattern—it increases along with the value of C/N
to about 25 dB-Hz and then decreases. This effect may be related to a signal power loss while tracking the P(Y)-code using the Z-tracking technique [
83]. Nevertheless, this hypothesis cannot be confirmed unequivocally. The matter should be investigated in more detail. In this case, we use the same approximating function as for the other signal modeling only for observation with C/N
dB-Hz. It should be noted, however, that the observation error is much smaller than for other code observations (in all the graphs, the same scale was adopted for the code noise variance with a maximum of 0.4 m, except for C2W observations for which the maximum is 0.1 m), and the impact on the final results of the positioning model solution is significantly smaller than the one of the carrier-phase measurements. The second exception is the model for BeiDou GEO observations. The low variability of the C/N
for geostationary satellites makes precise modeling difficult—for GEO L2I and L6I signals, the differences of C/N
for the determined carrier-phase variances are only 4 dB-Hz.
The time- and cross-correlation were determined based on the ZB DD observation time series analysis. To determine the time correlation, the autocorrelation function (ACF) for time series was used that measures the correlation between
and
of
stochastic process given by [
18]:
where
is the sample covariance of time series
with itself at time lag
,
denotes the mean of the time series
y and
T is the effective sample size of
y. The time-correlation coefficient for lag
is computed as:
where
is a sample variance of the time series for
. For the ZB DD combination, the variance of the time series is burdened with the influence of correlation
, but assuming that the LNA noise is constant over time, it will burden the
and
equally, so as a result, it does not affect the
.
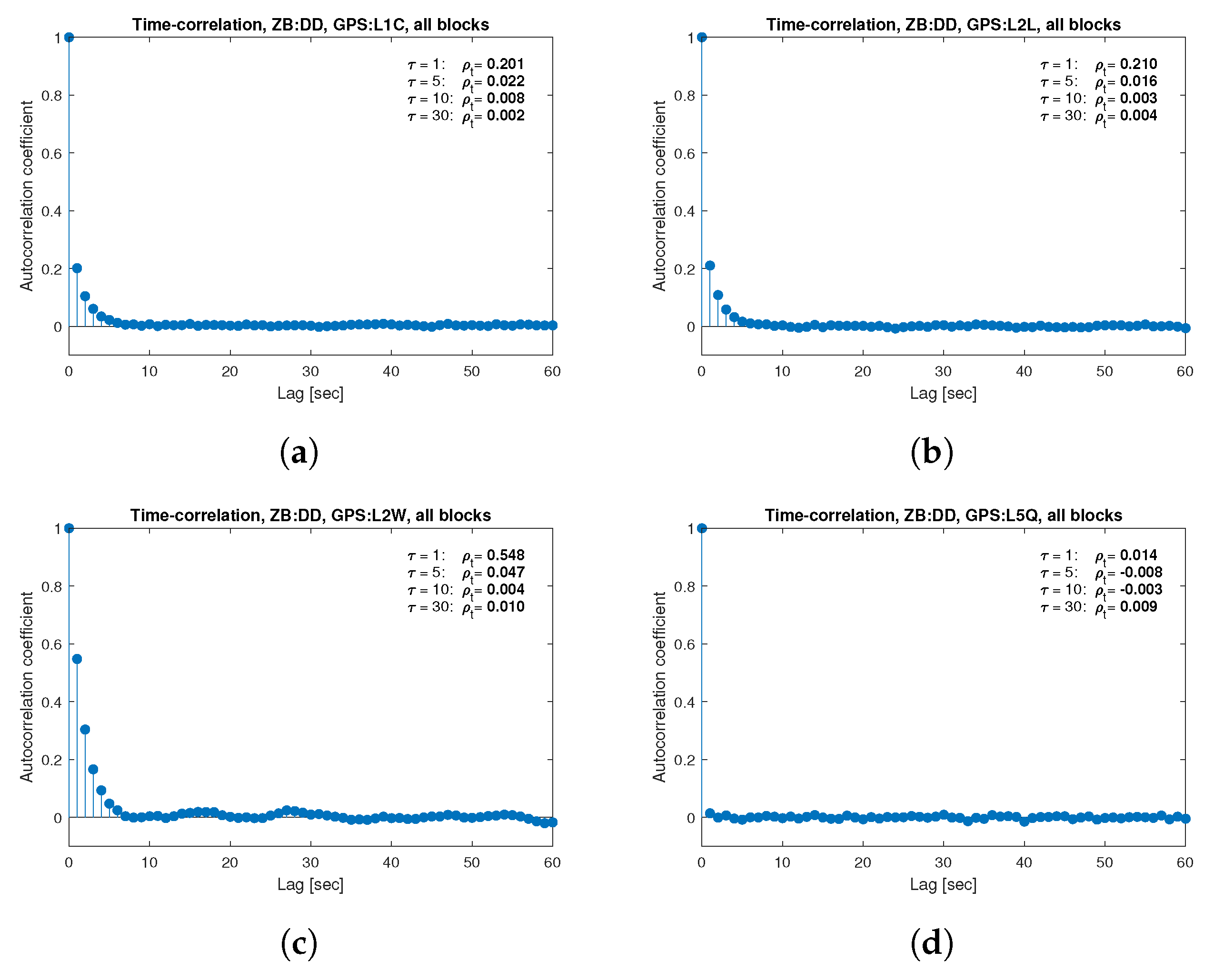
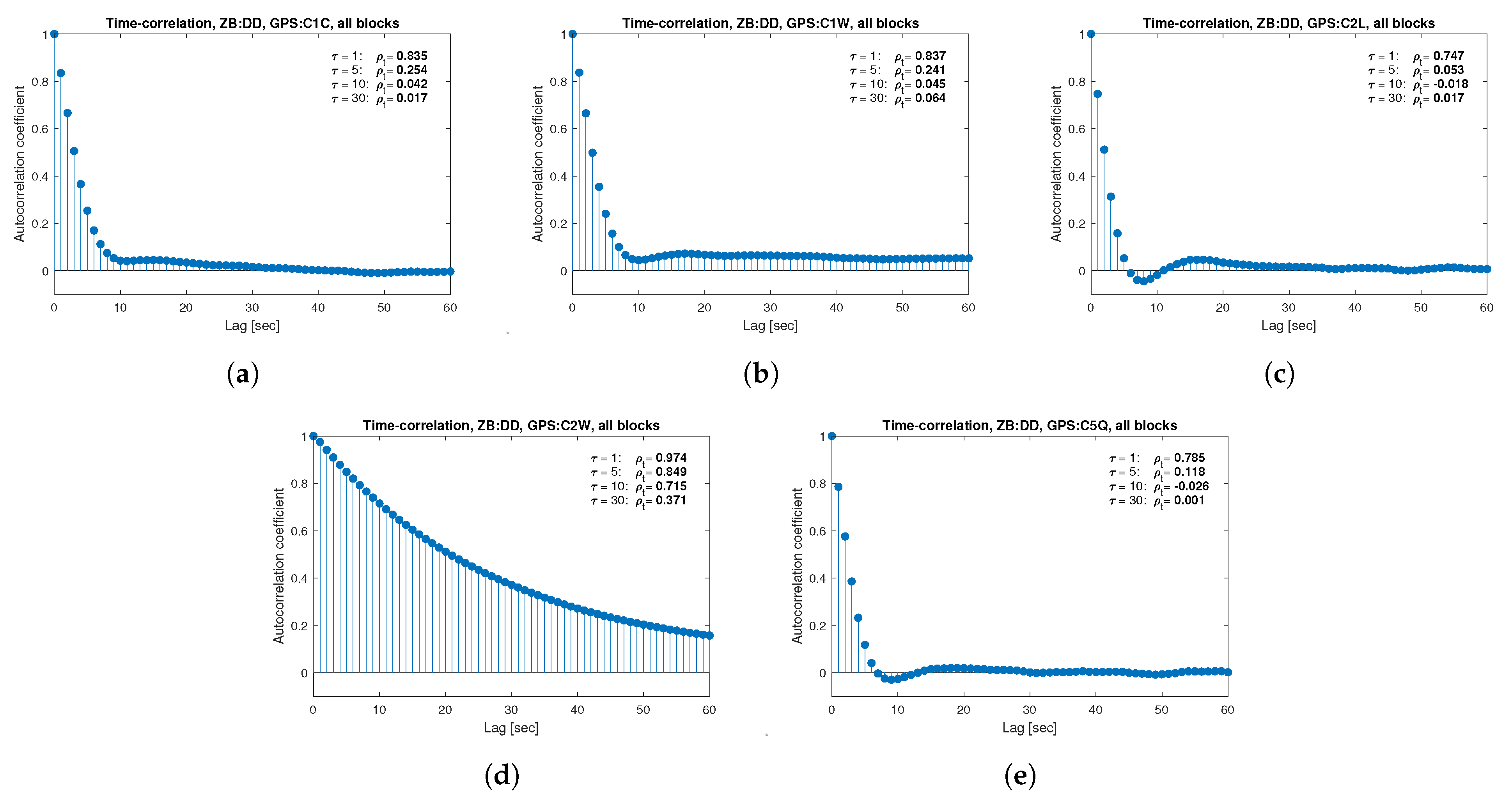
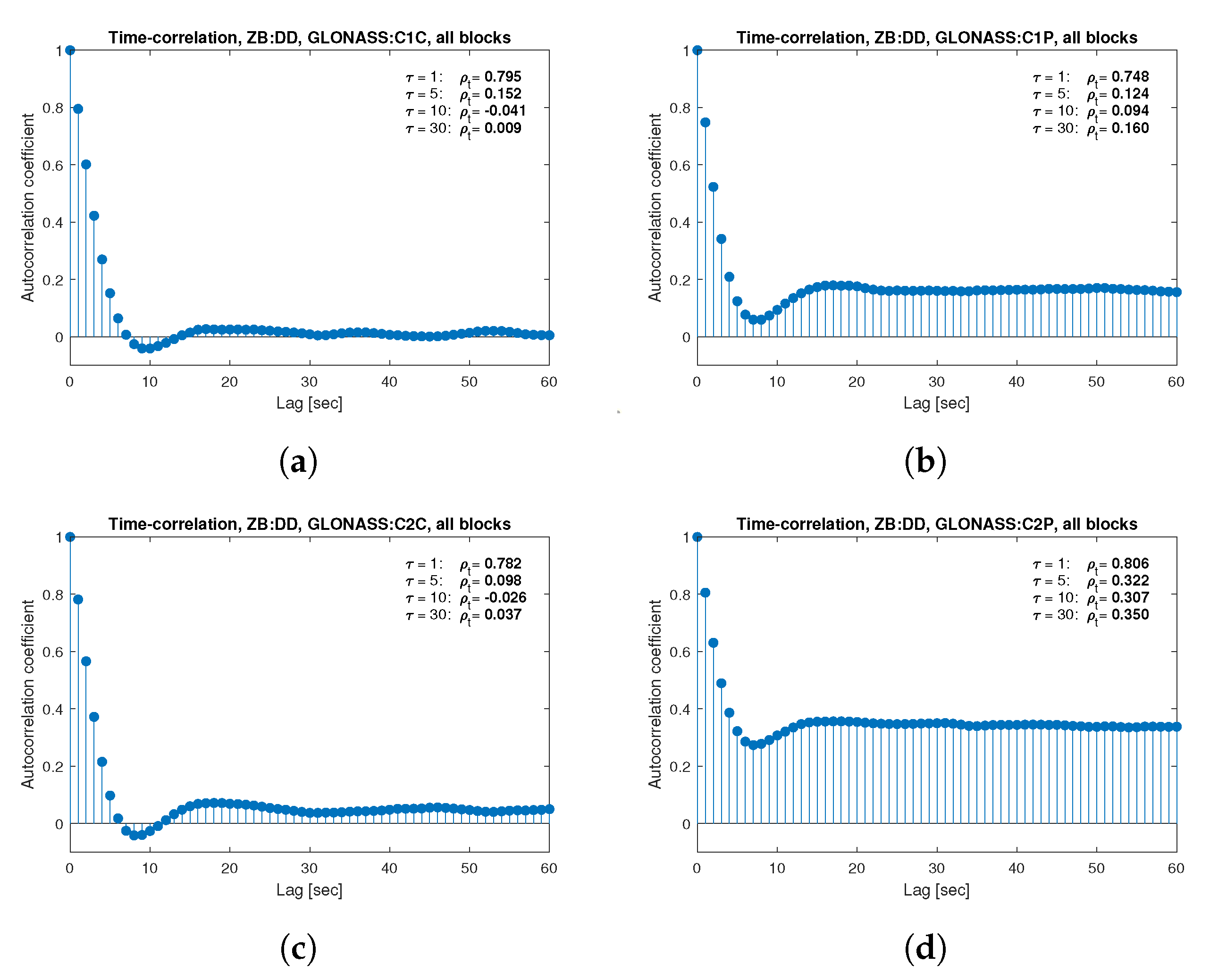
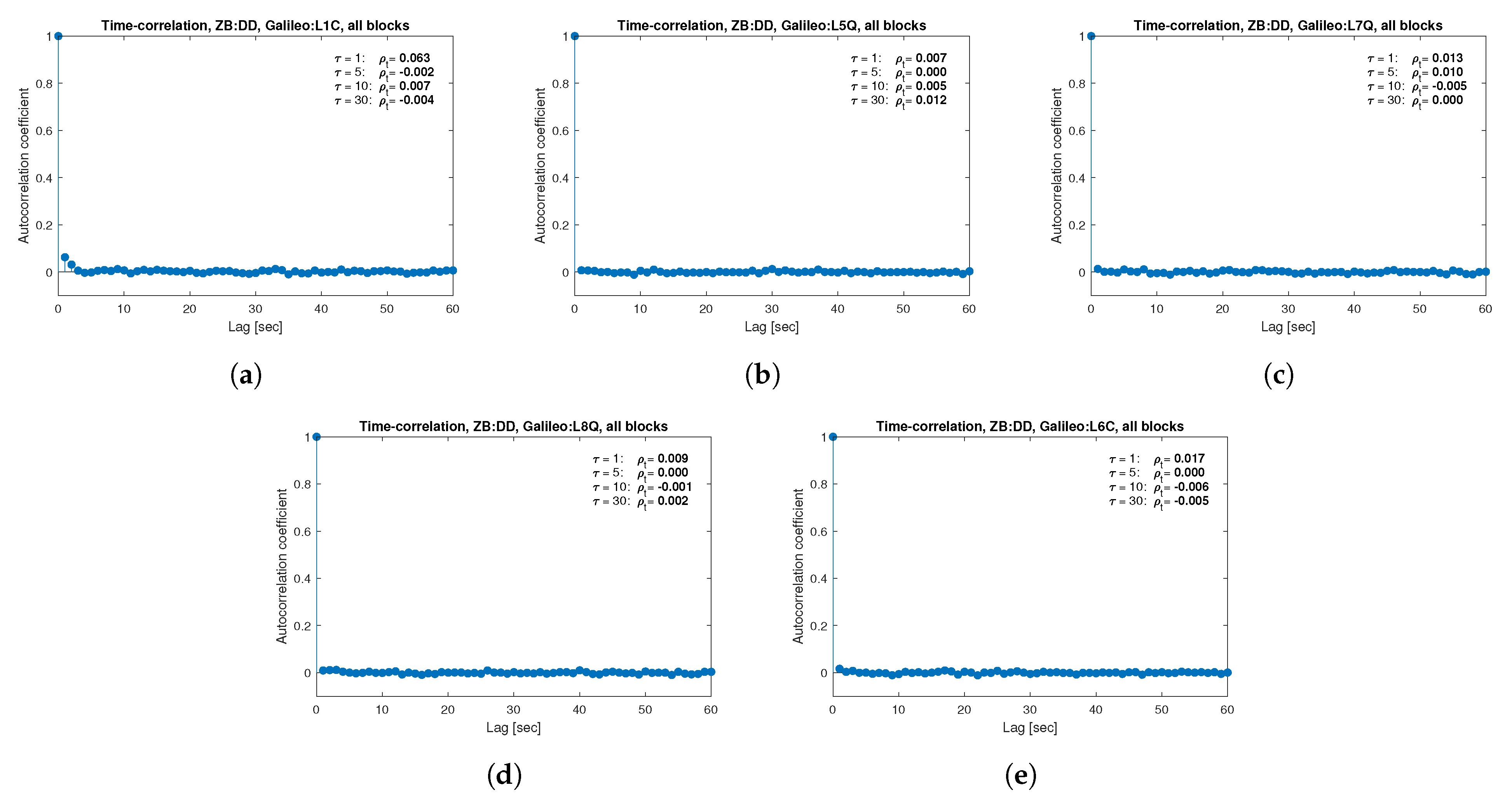
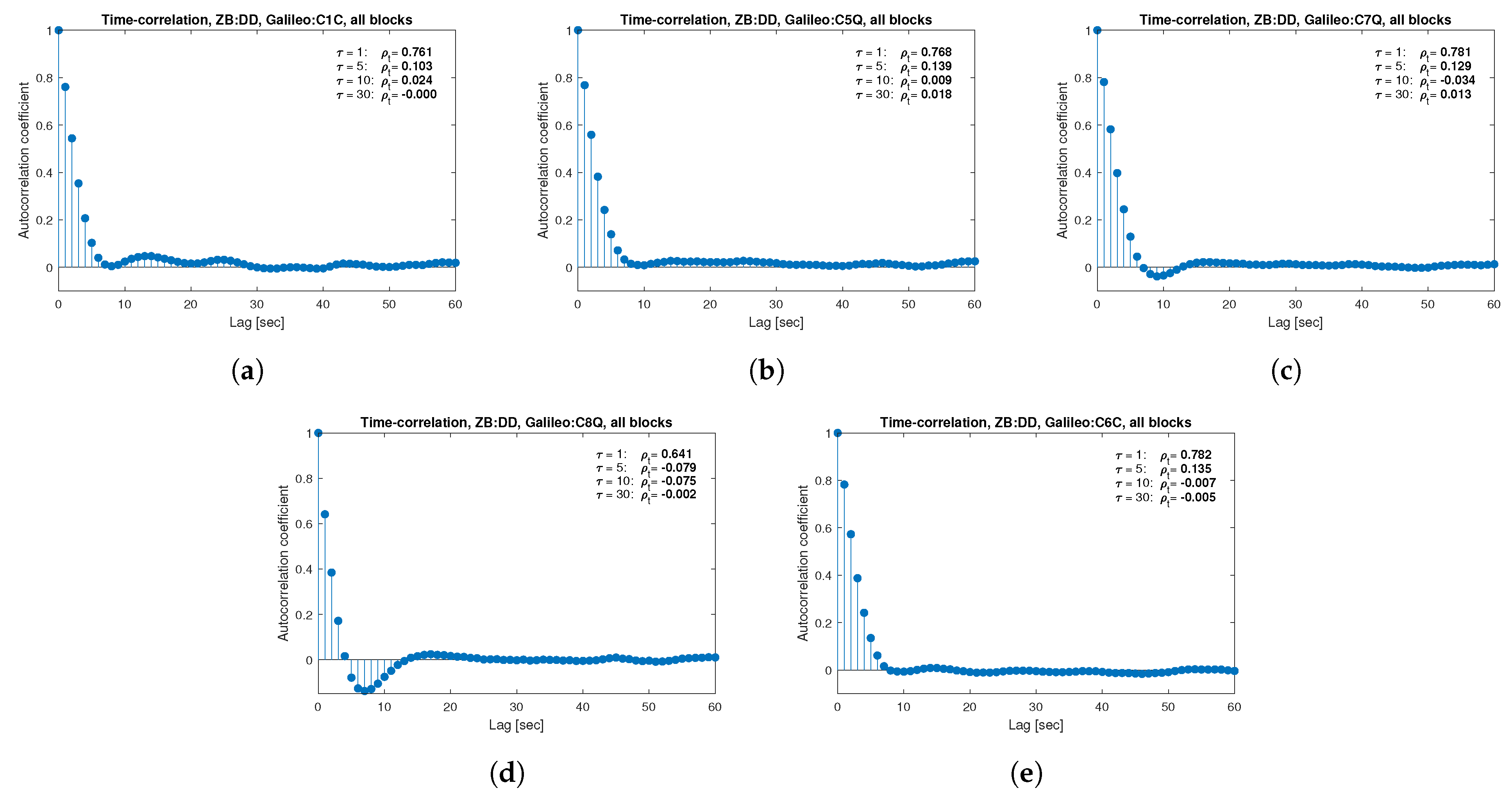
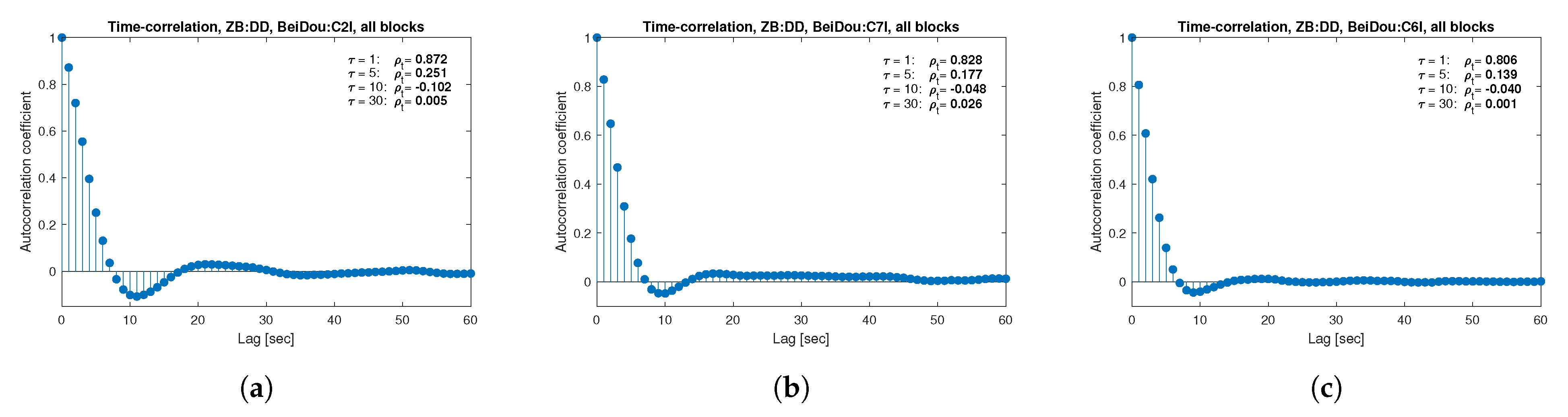
Figure 13,
Figure 14,
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19 and
Figure 20 show the sample autocorrelation coefficient for code and phase observations for all analyzed GNSS signals based on daily 1 Hz measurements. As for the variance model analysis presented previously, the presented ACFs did not distinguish between satellite blocks and were calculated as averages for all satellites. The average
for the selected lags (1, 5, 10 and 30 s) were also listed in the graphs. As can be easily seen, the time-correlation of the code observations reaches significant values for
s for all signals. There is also a noticeable high temporal correlation of pseudo-observation of encrypted GPS L2W and GLONASS C1P and C2P codes, for which this coefficient has significant values for the entire range of analyzed lags (
s). For carrier-phase measurements, the time-correlation coefficient is much smaller, especially for new systems Galileo and BeiDou as well as for the GPS L5Q signal, for which for
s it immediately drops off to about zero. For the remaining carrier-phase measurements, the time-correlation is significant only for
s except for GLONASS L2C and L2P observations where the
remains constant regardless of the lag. These examples lead to the conclusion that for the analyzed signals, there is a significant time-correlation of observations, especially for 1 Hz measurements, and its neglect may cause essential simplification in the realistic definition of the Multi-GNSS observation stochastic model.
The cross-correlation coefficients of measurements were determined based on the covariance of two time series
and
according to the formula:
The correlation coefficient is then calculated as:
where
and
are standard deviation of
and
, respectively.
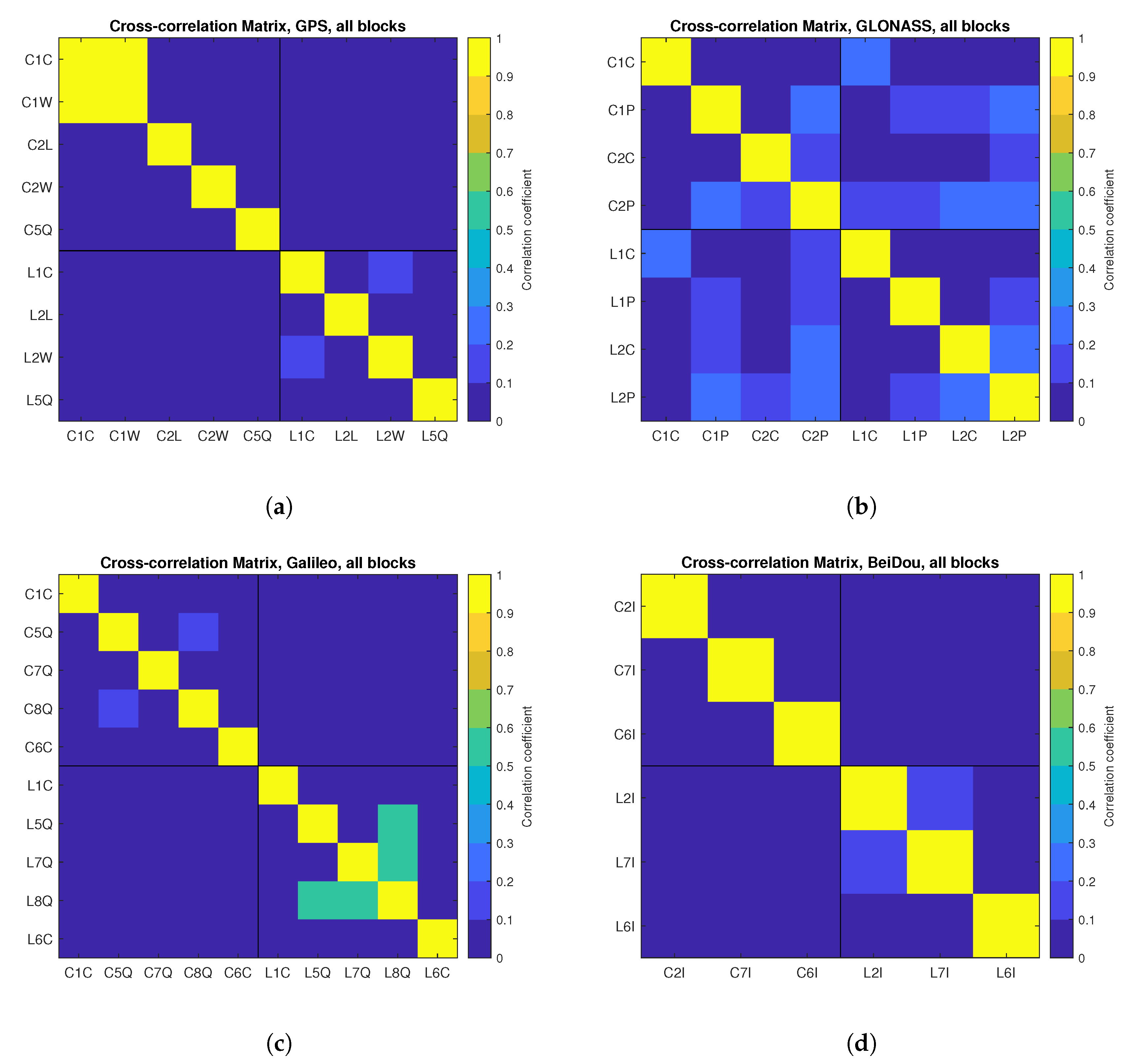
The cross-correlation coefficients were determined between corresponding ZB DD time series of the observations to the same satellites for different types of signals and frequencies within one GNSS system, and the average for all satellites was taken as the final value.
Figure 21 shows the cross-correlation coefficients of observations presented in a form of a correlation matrix for individual observation types for 1 Hz daily data. This Figure shows that only for the GPS C1C/C1W and Galileo L5Q/L7Q/L8Q measurements, we observe a significant cross-correlation between the observations. In the first case, it is due to a use of the Z-tracking technique of encrypted P(Y) code in which the difference measurements C1C-C1W are acquired instead of the direct observations of C1W [
83,
84]; this leads to a cross-correlation of observations reaching 0.95. In the second case, high correlation (up to 0.55) is a result of the structure of the Galileo E5 signal, which can be tracked independently for the E5a and E5b components or as a single wide bandwidth E5ab signal. In other cases, slight correlations between GPS L1C/L2W, GLONASS C1P/C2P and L2C/L2P, Galileo C5Q/C8Q measurements reaching 0.15 can be observed. No correlation was found between code and carrier-phase observations to the same satellites for all systems, except for the GLONASS system. However, in that case, when correlation coefficients are lower than 0.25, it can be concluded that the correlation is very weak and insignificant.
Summing up, it can be stated that the used combinations of observation residuals and the adopted fitting function allow for precise modeling of the dependence of the code and carrier-phase observation variance on the C/N parameter. The determined time- and cross-correlation coefficients may reach non-negligible values and significantly differ depending on the analyzed signal.
4. Positioning Model
Quantitative evaluation of the empirical, realistic stochastic model of GNSS observation was made based on the comparison of positioning model solution results that adopted different stochastic parameters. The geometry-based double-differenced code and carrier-phase observations positioning model for multi-frequency and Multi-GNSS systems was used for the tests with the a priori known atmospheric delays (i.e., the ionosphere-fixed troposphere-fixed model). The linearized functional and stochastic formulas of positioning models are given by:
where
is the observed minus computed DD carrier-phase and the code observation vector,
is the design matrix for position and ambiguities and
is a vector of unknown real-valued receiver position and integer-valued DD ambiguities. The stochastic model is captured by the dispersion with VC matrix
of DD observations. As the functional model used is widely described in the literature (e.g., [
53,
85,
86]) it is not defined in detail here. It should only be noted that only the intra-system differences were generated for a multi-system solution without combining observations from different GNSS systems.
The fully populated VC matrix of the undifferenced measurements for one receiver
a at a single epoch, denoted as
, is composed from matrices describing the variance
and cross-correlation
of observations in the form:
where
denotes the type of signal/frequency/system. The variance and cross-correlation matrices for
satellites are computed using empirical stochastic models of variance (Equation (
7)), time-correlation (Equation (
9)) and cross-correlation (Equation (
11)) parameters:
where
denotes identity matrix of size
k. In this simplified notation, it was assumed that the same satellites were observed for all signals, but in a general case for a different number of satellites, the appropriate dimensions of the matrices should be considered. The time-correlation coefficient
in the Equation (
15) refers to the correlation between the epochs making up the TD combinations used in the variance model. In the VC matrix for a single epoch, the time-correlation between the observations used in the positioning model cannot be taken into account; this parameter was included in the Kalman Filter for the multi-epoch approach.
The final formulation of VC matrix for the DD model for
a and
b receivers is given by:
where
is a block diagonal of
m single-differencing matrices [
87].
The solution of the positioning model presented by Equations (
12) and (
13) was employed by the Kalman Filter (KF). For the discrete-time standard KF, the prediction step at epoch
t is performed as [
88]:
where
is the estimate of
,
is the state transition matrix from epoch
to
t,
is the state error covariance matrix and
is the covariance matrix of a process noise; symbols
and
denote values before and after the measurement updating, respectively. For a continuous solution where the position and ambiguity are determined as unknowns, the state transition matrix is the identity matrix; the initial parameters for the process noise covariance matrix are described in the next section.
To handle the time-correlated errors in a multi-epoch solution the modified KF based on the time-differencing alghorithm (proposed by [
89] and revised by [
90]) is used. In this approach, the temporal correlation data, correlated with previous measurements at a time lag
, is limited in updating step by differencing redundant information determined using correlation coefficient:
where
is the transition matrix of the time-correlated errors and contains correlation coefficient for time lag
(see Equation (
9)) [
91]; superscript
denotes a modified time-differenced quantity. Hence the modified design matrix, modified measurement VC matrix
as well as the new correlation matrix describing correlation between measurement noise and process noise
are given by formulas:
The measurement VC matrix must be presented as a function of white (uncorrelated) measurement noise VC matrix
and time correlated noise VC matrix
in the form:
and the decomposition of
into
and
can be done as [
88]:
The solution for the updated state is then computed using a gain matrix
defined as:
The modified KF was used to obtain the float solution (approximate coordinates and real-valued DD ambiguities) with its VC matrix. The final baseline solution was obtained after fixed integer ambiguity using Integer Least-Squares (ILS) estimates and updating float solution. Note that the presented algorithm taking into account the time-correlation of observations can be simply reduced to a standard Kalman Filter when a time-correlation coefficient is assumed to be zero. A detailed description of the data set used to evaluate the empirical stochastic model impact on the positioning model solution is presented in
Section 5.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}