




Sensors 2025, 25(23), 7203; https://doi.org/10.3390/s25237203 - 25 Nov 2025
Viewed by 442
Abstract
►
Show Figures
For human–robot gesture-driven control, this paper proposes a deep learning-based approach that employs both static and dynamic gestures to drive and control robots for object-grasping and delivery tasks. The method utilizes two-dimensional Convolutional Neural Networks (2D-CNNs) for static gesture recognition and a hybrid
[...] Read more.
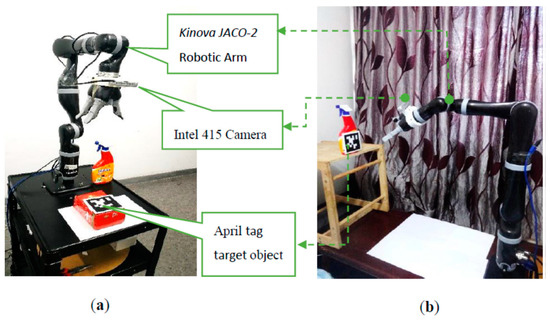
For human–robot gesture-driven control, this paper proposes a deep learning-based approach that employs both static and dynamic gestures to drive and control robots for object-grasping and delivery tasks. The method utilizes two-dimensional Convolutional Neural Networks (2D-CNNs) for static gesture recognition and a hybrid architecture combining three-dimensional Convolutional Neural Networks (3D-CNNs) and Long Short-Term Memory networks (3D-CNN+LSTM) for dynamic gesture recognition. Results on a custom gesture dataset demonstrate validation accuracies of 95.38% for static gestures and 93.18% for dynamic gestures, respectively. Then, in order to control and drive the robot to perform corresponding tasks, hand pose estimation was performed. The MediaPipe machine learning framework was first employed to extract hand feature points. These 2D feature points were then converted into 3D coordinates using a depth camera-based pose estimation method, followed by coordinate system transformation to obtain hand poses relative to the robot’s base coordinate system. Finally, an experimental platform for human–robot gesture-driven interaction was established, deploying both gesture recognition models. Four participants were invited to perform 100 trials each of gesture-driven object-grasping and delivery tasks under three lighting conditions: natural light, low light, and strong light. Experimental results show that the average success rates for completing tasks via static and dynamic gestures are no less than 96.88% and 94.63%, respectively, with task completion times consistently within 20 s. These findings demonstrate that the proposed approach enables robust vision-based robotic control through natural hand gestures, showing great prospects for human–robot collaboration applications.
Full article

Figure 1















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}