Abstract
The advancement of autonomous vehicles (AVs) has brought forth a substantial need for effective education in robotic operating systems, particularly ROS 2, which serves as the backbone for many autonomous vehicle (AV) applications. This paper explores the academic approach and instructional methodologies tailored for teaching ROS 2 in the context of autonomous vehicle technology. It highlights the critical components and architecture of ROS 2, emphasizing its modularity, real-time communication capabilities, and robust ecosystem which make it ideal for AV development. Through a detailed curriculum outline, we describe hands-on learning activities, simulation-based exercises, and project-driven modules that facilitate deep understanding and practical skills acquisition. The effectiveness of these teaching methods is evaluated through a mixed-methods study involving student feedback, performance assessments, and project outcomes. Results indicate significant improvements in student comprehension and proficiency in both ROS 2 and autonomous vehicle systems. This research contributes to the body of knowledge by providing a comprehensive framework for educators to effectively teach ROS 2, thereby fostering the next generation of engineers proficient in developing and deploying autonomous vehicle technologies.
1. Introduction
The Digital Education Action Plan is a renewed European Union (EU) policy initiative that also prioritizes STEM education (science, technology, engineering, and mathematics) [1]. Autonomous vehicles and robotics which are emerging STEM fields are int the focus of our research group with ROS 2, which serves as the backbone for these systems.
The learning curve of ROS 2 (Robot Operating System 2) is considered steep due to several interrelated factors that collectively create a challenging environment for newcomers [1,2,3,4,5,6]. Firstly, ROS 2 is a complex system that integrates a multitude of tools, libraries, and conventions designed to facilitate the creation of sophisticated and robust robot behaviors. This complexity, while providing powerful capabilities, can be overwhelming for beginners who must grasp various components such as nodes, topics, services, actions, and parameters. Moreover, ROS 2 operates on a distributed system architecture where multiple nodes communicate over a network. Understanding this architecture, including the setup and management of inter-node communication, requires knowledge of network programming and concurrent computing, both of which are advanced topics that can be daunting for novices. Additionally, ROS 2 uses the Data Distribution Service (DDS) as its default middleware, which adds another layer of abstraction. DDS introduces concepts like Quality of Service (QoS) settings that must be understood and properly configured, further complicating the learning process.
The real-time requirements of many ROS 2 applications, especially in fields like autonomous vehicles, add an additional layer of complexity. Achieving real-time performance necessitates an understanding of issues related to latency, jitter, and determinism, which are typically addressed in real-time systems. Beginners may find it difficult to determine which components to use and how to assemble them into a functional autonomous vehicle or robotic system. Additionally, the educational resources available for ROS 2, though growing, are still limited compared to more established technologies. Finally, the effective learning of ROS 2 often necessitates hands-on experience with physical or simulated robots. Setting up and configuring the necessary hardware and software environments can be technically demanding, requiring a good understanding of robotics hardware, sensors, and actuators. This practical aspect of learning adds to the overall complexity, making the learning curve of ROS 2 steep and challenging for many newcomers.
Considering the aforementioned points, our team decided to develop a uniquely tailored ROS 2 course specifically focused on autonomous vehicles and robotics. The course encompasses C++ and Python based ROS 2 programming. We have open-sourced this course and made it available to anyone interested in learning.
2. Related Courseware
There is a diverse range of ROS 2 courseware available, each tailored to different aspects of robotics. Some courses concentrate on aerial robotics and flying drones, while others specialize in robotic arms or communication systems. Our specific focus, however, is on ground robotics and autonomous vehicles. To address this, we developed our own courseware designed to focus on these areas. Additionally, where licensing permitted, we incorporated elements from existing courseware to enhance our curriculum and ensure comprehensive coverage of relevant topics. Table 1 summarizes the educational resources that were cited or shaped our syllabus.

Table 1.
Course materials that influenced or were referenced in our syllabus.
3. The Developed Syllabus and Hands-On Learning
The syllabus (Table 2) is structured to guide students progressively through key concepts and practical applications of ROS 2, starting with foundational knowledge and advancing toward complex system integrations like perception, simulation, and real-time control. Each module is designed to offer a balanced blend of lectures, hands-on exercises, and project-based learning to ensure that students not only comprehend the theoretical aspects of ROS 2 but also gain substantial practical experience.
Table 2.
Description of our syllabus.
4. Selected Aspects of the Syllabus and Experiments
The syllabus our team constructed follows the patterns of the popular course structures mentioned in the previous chapter. Although our special focus and previous teaching experience slightly altered these patterns. In the following a few notable examples will be introduced.
According to our team’s previous experience there are some parts of robotics which engineers and computer science student understand very differently. One of the simplest examples of the mentioned phenomenon are the kinematic equations for vehicle motion in 2 dimensions (see Equation (1)). These equations describe the motion of the autonomous vehicle or robot, in terms of its position and velocity. The equation describes the connection between (x,y), which is the position of the vehicle, θ, which is the heading angle, v, which is the linear velocity, ϕ, which is the steering angle, and L, which is the wheelbase of the vehicle.
For an engineer, developing code from this equation is relatively straightforward; however, it presents challenges for certain students. Figure 1 displays the same equation, slightly modified in discreet domain and introduced with the sampling time. From this form it is much easier to create the corresponding C++ and Python code. Although it may seem like a minimal didactic adjustment, this approach significantly enhances student understanding.

Figure 1.
Motion equations (a) in the discrete time domain and the corresponding ROS 2 Python (b) and ROS 2 C++ (c) code snippets.
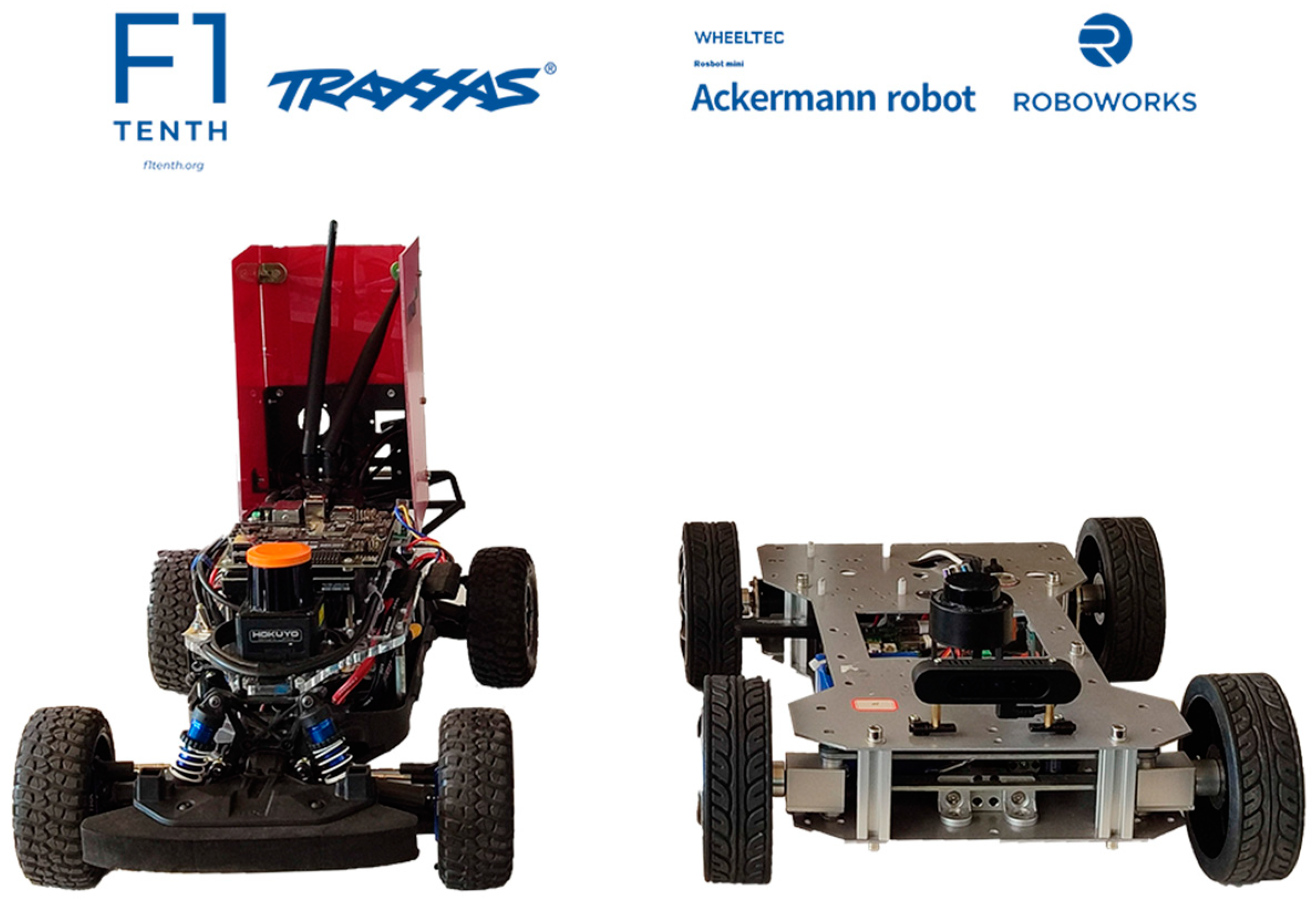
Another altered pattern of the compared to the popular course structure is that they tend to use own-developed robots [1,3,5,6]. Our approach was in that situation rather buy than build. Our approach is to use simulator as much as possible and at the end of the semester, students who are persistent enough can use a real robot. In the syllabus Ignition Gazebo, now known simply as Gazebo is used. Gazebo is a powerful simulation tool widely used in ROS 2 teaching. This simulator is quite lightweight our course is designed in a way that students could run simulations even without a powerful GPU. In this course 4 standard F1/10 Traxxas Robot [7,8,9] and 12 Wheeltec Ackermann Robot is used. At the end of the semester the simulation-based work could be continued on a real-world robot.
The mentioned robots have roughly the same dimensions, similar sensors (Figure 2), but a slightly different mechanical build. Wheeltec could be considered as a low-cost version of the F1/10 car, here most of the algorithms and teaching materials apply. With this approach we not only got strong teaching materials [10,11,12] for F1/10 car, but also, we could adopt it for the Wheeltec car too.

Figure 2.
Side-by-side scale comparison of F1/10 Ackermann robot and Wheeltec Roboworks Rosbot-mini Ackermann robot.
5. Discussion
The rise of autonomous vehicles (AVs) has generated a strong demand for effective education in robotic operating systems, particularly ROS 2, which plays a crucial role in numerous AV applications. This paper examines academic approaches and instructional methodologies for teaching ROS 2 in the context of AV technology. It highlights ROS 2’s critical components, modularity, real-time communication capabilities, and robust ecosystem, making it ideal for AV development. The paper outlines a part of the curriculum featuring hands-on activities, and project-driven modules to enhance understanding and practical skills. The effectiveness of these teaching methods is assessed through a mixed-methods study involving student feedback, performance assessments, and project outcomes, showing substantial improvements in student comprehension and proficiency. This research offers a comprehensive framework for educators to teach ROS 2 effectively, preparing the next generation of engineers for AV technology development and deployment.
Our team has accumulated one semester of experience with the Hungarian version of the course. The English version is nearing completion. Both versions are available online and are open source.
Author Contributions
Conceptualization, E.H. and G.I.; methodology, R.K.; software, M.U. and G.I.; resources, G.I., E.H. and N.M.; data curation, R.K.; writing—original draft preparation, E.H. All authors have read and agreed to the published version of the manuscript.
Funding
The research was supported by the European Union within the framework of the National Laboratory for Autonomous Systems. (RRF-2.3.1-21-2022-00002).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Source code and data available on https://sze-info.github.io/avr (accessed on 19 July 2024).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Karalekas, G.; Vologiannidi, S.; Kalomiros, J. Europa: A case study for teaching sensors, data acquisition and robotics via a ROS-based educational robot. Sensors 2020, 20, 2469. [Google Scholar] [CrossRef] [PubMed]
- Cañas, J.M.; Perdices, E.; García-Pérez, L.; Fernández-Conde, J. A ROS-based open tool for intelligent robotics education. Appl. Sci. 2020, 10, 7419. [Google Scholar] [CrossRef]
- Roldán-Álvarez, D.; Cañas, J.M.; Valladares, D.; Arias-Perez, P.; Mahna, S. Unibotics: Open ROS-based online framework for practical learning of robotics in higher education. Multimed. Tools Appl. 2024, 83, 52841–52866. [Google Scholar] [CrossRef]
- Karaca, M.; Yayan, U. ROS based visual programming tool for mobile robot education and applications. arXiv 2020, arXiv:2011.13706. [Google Scholar]
- Araújo, A.; Portugal, D.; Couceiro, M.S.; Rocha, R.P. Integrating Arduino-based educational mobile robots in ROS. J. Intell. Robot. Syst. 2015, 77, 281–298. [Google Scholar] [CrossRef]
- Raudmäe, R.; Schumann, S.; Vunder, V.; Oidekivi, M.; Nigol, M.K.; Valner, R.; Masnavi, H.; Singh, A.K.; Aabloo, A.; Kruusamäe, K. ROBOTONT–Open-source and ROS-supported omnidirectional mobile robot for education and research. HardwareX 2023, 14, e00436. [Google Scholar] [CrossRef] [PubMed]
- O’Kelly, M.; Sukhil, V.; Abbas, H.; Harkins, J.; Kao, C.; Pant, Y.V.; Bertogna, M. F1/10: An open-source autonomous cyber-physical platform. arXiv 2019, arXiv:1901.08567. [Google Scholar]
- Tătulea-Codrean, A.; Mariani, T.; Engell, S. Design and simulation of a machine-learning and model predictive control approach to autonomous race driving for the f1/10 platform. IFAC-PapersOnLine 2020, 53, 6031–6036. [Google Scholar] [CrossRef]
- Agnihotri, A.; O’Kelly, M.; Mangharam, R.; Abbas, H. Teaching autonomous systems at 1/10th-scale: Design of the f1/10 racecar, simulators and curriculum. In Proceedings of the 51st ACM Technical Symposium on Computer Science Education, Portland, OR, USA, 11–14 March 2020; pp. 657–663. [Google Scholar]
- Betz, J.; Zheng, H.; Liniger, A.; Rosolia, U.; Karle, P.; Behl, M.; Mangharam, R. Autonomous vehicles on the edge: A survey on autonomous vehicle racing. IEEE Open J. Intell. Transp. Syst. 2022, 3, 458–488. [Google Scholar] [CrossRef]
- Evans, B.D.; Betz, J.; Zheng, H.; Engelbrecht, H.A.; Mangharam, R.; Jordaan, H.W. Bypassing the Simulation-to-reality Gap: Online Reinforcement Learning using a Supervisor. In Proceedings of the 2023 21st International Conference on Advanced Robotics (ICAR), Abu Dhabi, United Arab Emirates, 5–8 December 2023; pp. 325–331. [Google Scholar]
- Evans, B.D.; Betz, J.; Zheng, H.A.; Engelbrecht, H.A.; Mangharam, R.; Jordaan, H.W. High-performance Racing on Unmapped Tracks using Local Maps. arXiv 2024, arXiv:2401.17732. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).