Abstract
We considered a primal-mixed method for the Darcy–Forchheimer boundary value problem. This model arises in fluid mechanics through porous media at high velocities. We developed an a posteriori error analysis of residual type and derived a simple a posteriori error indicator. We proved that this indicator is reliable and locally efficient. We show a numerical experiment that confirms the theoretical results.
1. Introduction
The Darcy–Forchheimer model constitutes an improvement of the Darcy model which can be used when the velocity is high [1]. It is useful for simulating several physical phenomena, remarkably including fluid motion through porous media, as in petroleum reservoirs, water aquifers, blood in tissues or graphene nanoparticles through permeable materials. Let be a bounded, simply connected domain in with a Lipschitz-continuous boundary . The problem reads as follows: given known functions and f, find the velocity and the pressure p such that
where is the dynamic viscosity, denotes the fluid density, is the Forchheimer number K denotes the permeability tensor, represents gravity, f is compressibility, and is the unit outward normal vector to .
We make use of the finite element method to approximate the solution of problem (1). We present the approach by Girault and Wheeler [1], who introduced the primal formulation, in which the term undergoes weakening by integration by parts. It is shown in [1] that problem (1) has a unique solution in the space , where and (we use the standard notations for Lebesgue and Sobolev spaces).
2. Discrete Problem
To pose a discrete problem, we can use a family of conforming triangulations to divide the domain such that where represents the mesh size. Here we follow [2] and choose the following conforming discrete subspaces of X and M, respectively:
where
Then, the discrete problem consists in finding such that
3. Novel Error Estimator and Adaptive Algorithm
We denote by , and , respectively, the sets of edges e belonging to the interior domain, the boundary and the element T; denotes the length of a particular edge e; and is the diameter of a given element T. We denote by the jump of v across the edge e in the direction of , a fixed normal vector to side e. Finally, we use the operator .
On every triangle , we propose the following a posteriori error indicator:
We also define the global a posteriori error indicator .
Theorem 1.
where .For the primal-mixed method (2), there exists a positive constant , independent of h, and a positive constant , independent of h and T, such that
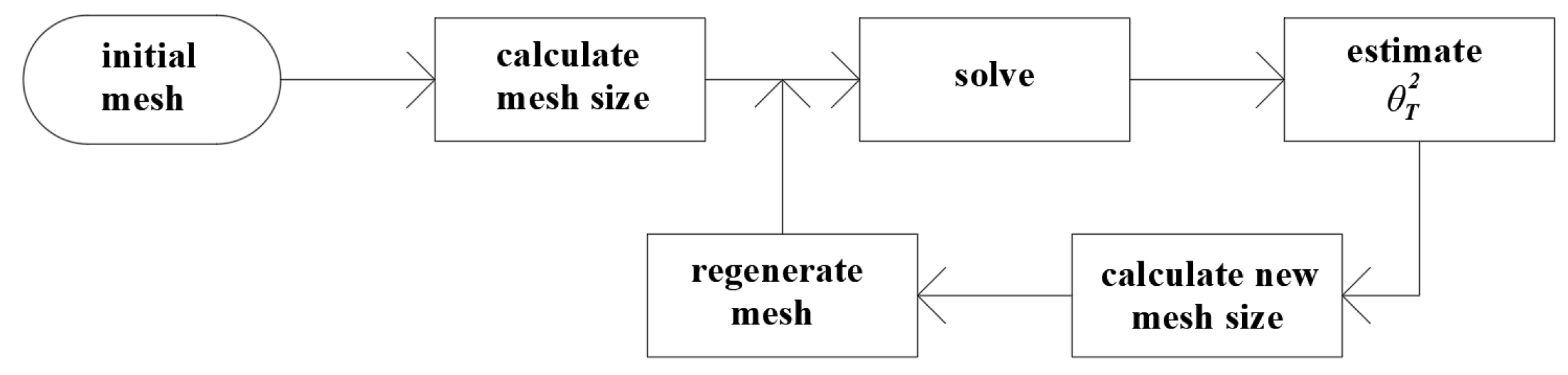
We propose an adaptive algorithm based on the a posteriori error indicator . Given an initial mesh, we follow the iterative procedure described in Figure 1. Each new mesh is generated as suggested in [3].
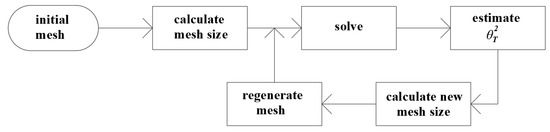
Figure 1.
Adaptive algorithm flux diagram.
4. Numerical Experiment
We performed several simulations in FreeFem++ [4], validating the theoretical results. Here we select an example on an L-shaped domain, , and focus on the data f and so that the exact solution is
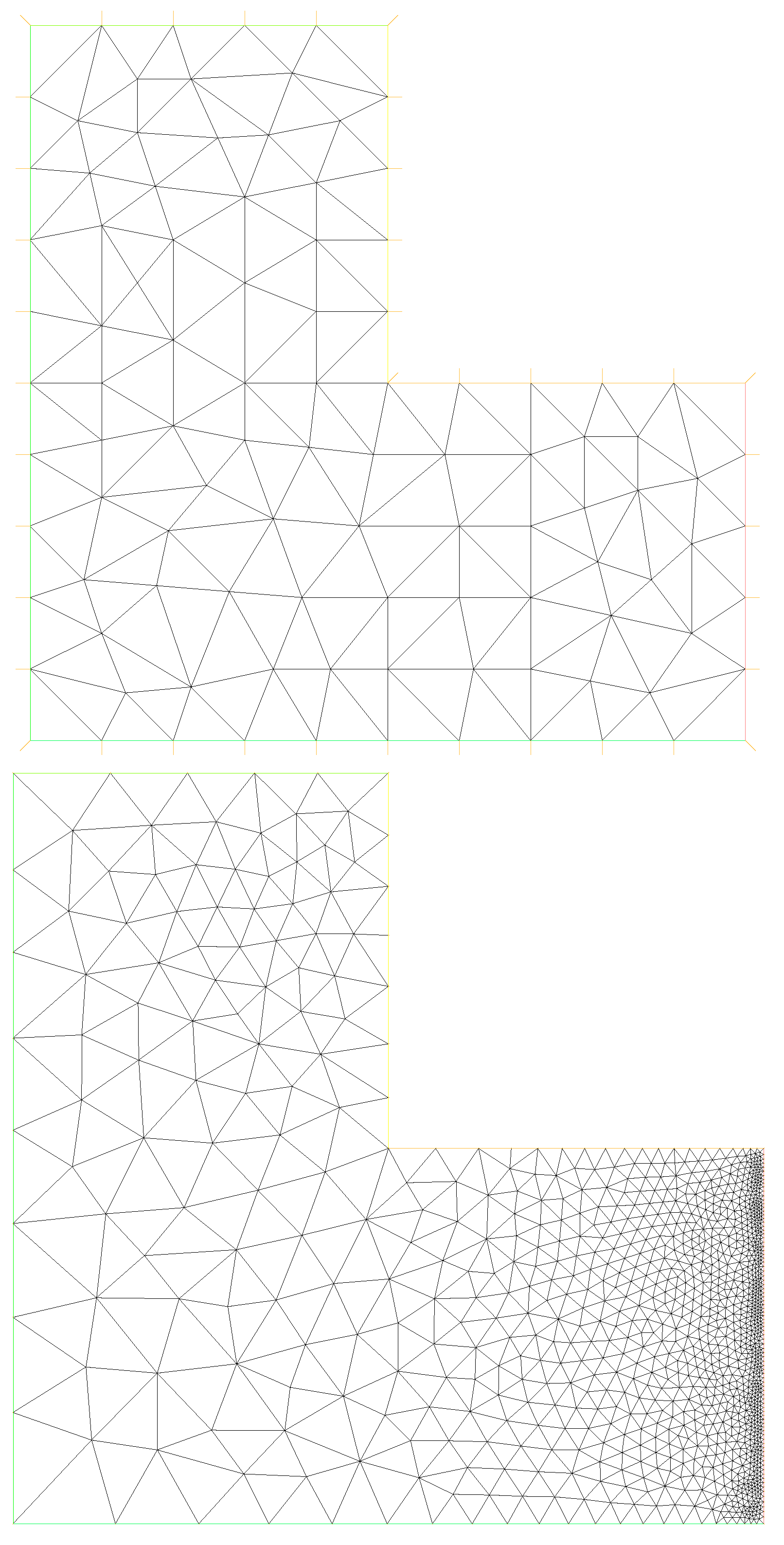
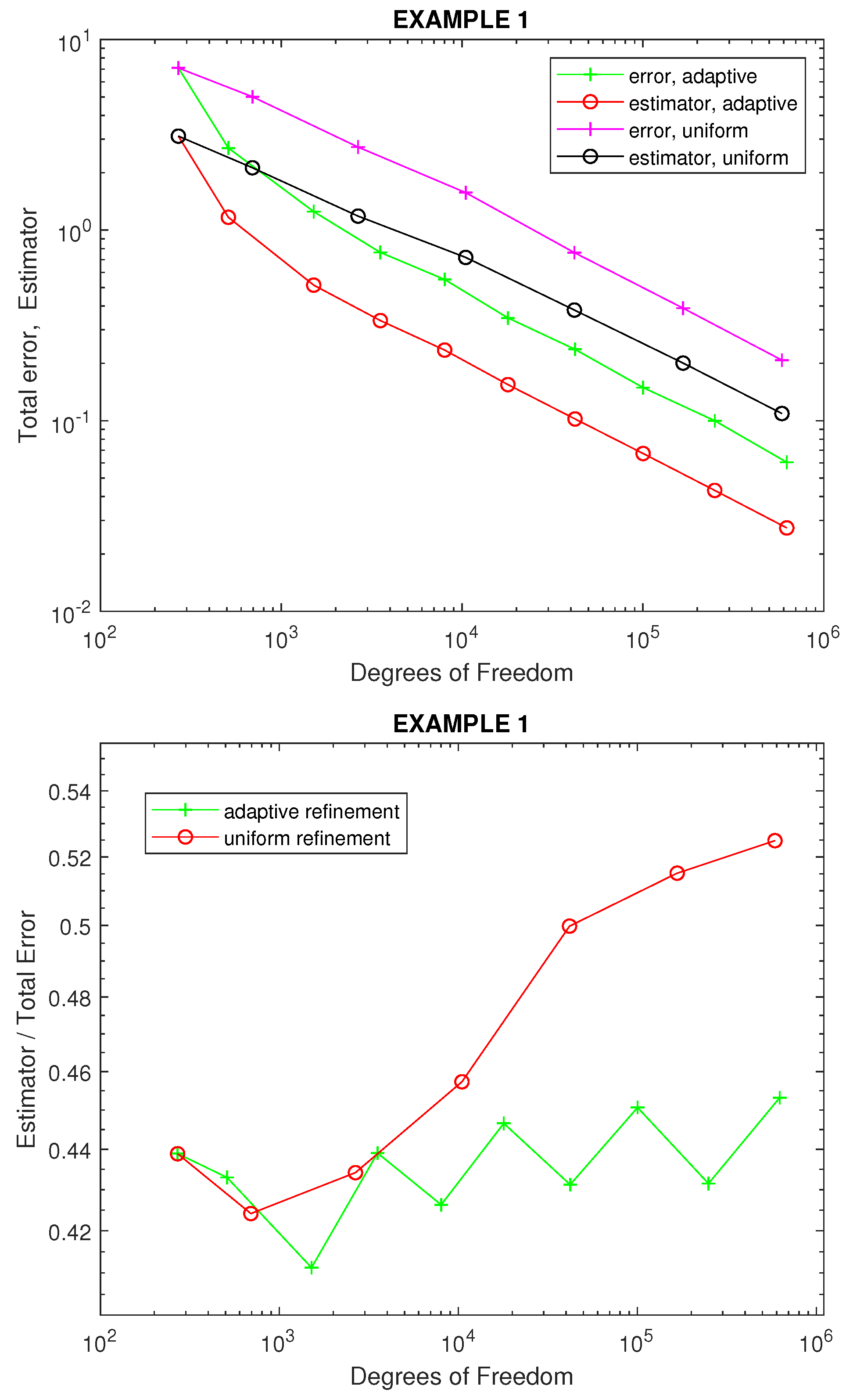
Thus the solution has a singularity in pressure close to the line . Figure 2 shows the mesh refinement by the adaptive algorithm. Figure 3, bottom, represents the evolution with respect to degrees of freedom (DOF) of error and indicator; on the right, we can observe the evolution of the efficiency index with DOF.
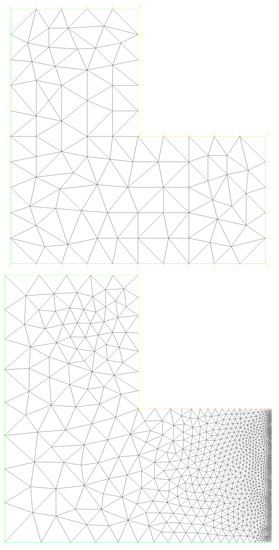
Figure 2.
Example 1. Initial mesh (270 DOF) on the (top); intermediate adapted mesh with 1512 DOF on the (bottom).
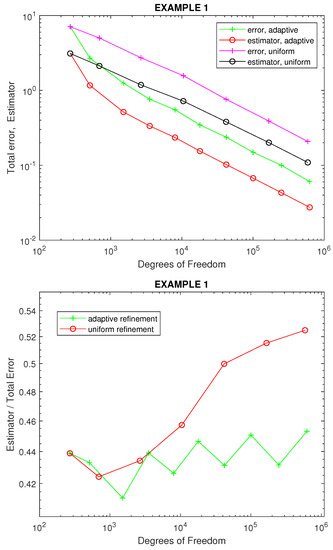
Figure 3.
Example 1. (Top): Error and indicator evolution vs. DOF. (Bottom): Efficiency index vs. DOF.
5. Discussion
The adaptive algorithm was tested on an example with a singularity. From Figure 2 we can observe that the algorithm refined the mesh near the singularity, as expected. Since it is an academic example with a known solution, we could compute the exact error. The graphs in Figure 3 confirm that the error was lower for the adaptive refinement. Additionally, since the exact error and estimator followed close to parallel lines, we confirm that the indicator gives a consistent measure of the error. This could also be checked by the efficiency index, which is the ratio of indicator to exact total error.
Funding
The authors acknowledge the support of CITIC (FEDER Program and grant ED431G 2019/01). The research of M.G. is partially supported by Xunta de Galicia Grant GRC ED431C 2018-033. The research of H.V. is partially supported by Ministerio de Educación grant FPU18/06125.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Girault, V.; Wheeler, M.F. Numerical Discretization of a Darcy-Forchheimer Model. Numer. Math. 2008, 110, 161–198. [Google Scholar] [CrossRef]
- Salas, J.J.; López, H.; Molina, B. An analysis of a mixed finite element method for a Darcy-Forchheimer model. Math. Comput. Model. 2013, 57, 2325–2338. [Google Scholar] [CrossRef]
- Borouchaki, H.; Hecht, F.; Frey, P. Mesh gradation control. Int. J. Numer. Meth. Eng. 1998, 43, 1143–1165. [Google Scholar] [CrossRef]
- Hetch, F. FreeFEM Documentation, Release 4.6. 2020. Available online: https://doc.freefem.org/pdf/FreeFEM-documentation.pdf (accessed on 13 October 2021).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).