
A Multi-Parameter Flexible Smart Water Gauge for the Accurate Monitoring of Urban Water Levels and Flow Rates


Abstract
1. Introduction
2. Flexible Smart Water Gauge
2.1. Basic Principles
Principles of Collecting Water-Level Data
2.2. The Principle of Flexible Smart Water Gauge Flow Rate Data Acquisition
- (1)
- Use a flow meter to measure the flow velocity at different depths at the same test point in the same water area, and obtain the accurate value , which is, respectively, recorded as ;
- (2)
- Use the detection ruler of the flexible smart water gauge to measure the flow velocity at different depths of the same test point in the same water area described in step (1), respectively, obtain the initial value of the angle measured by the angle sensor , and repeat the measurement m times to obtain the average value, the initial angle average value is obtained, and the initial angle average values measured by n angle sensors are recorded as , m is a positive integer ;
- (3)
- Convert the Angle into the initial flow rate ;Here, m signifies the weight of each section of the detection ruler, while T denotes the tensile force of each section of the detection ruler. represents the impact force of each section of the detection ruler caused by the flowing water, with p being the pressure of the corresponding section of the flowing water at different depths on the ruler, representing the area of the water-facing surface of each section of the detection ruler, and r indicating the outer diameter of the second insulating shell. Bernoulli’s equation for fluids is also utilized, given as follows:where Q is a constant and is the density of the liquid, the depth corresponding to the ith angle sensor.It can be obtained from the Formulas (6)–(10)
- (4)
- Comparing the in step (3) with the in step 1, we obtainThat is the correction coefficient that is obtained, where i is a positive integer , is the first correction coefficient, and di is the second correction coefficient. By using a flow meter to measure the flow velocity at different depths of the same test point in the same water area, an accurate value is obtained; then, we used the detection ruler of a flexible water gauge to measure the flow velocity at different depths of the same test point in the same water area and obtain the angle. The initial value of the angle was measured by the sensor , and then the first correction coefficient and the second correction coefficient were obtained.
- (5)
- Place the flexible smart water gauge at the point to be detected with the detection water area, so that the 0 scale line of the detection ruler is flush with the horizontal plane;
- (6)
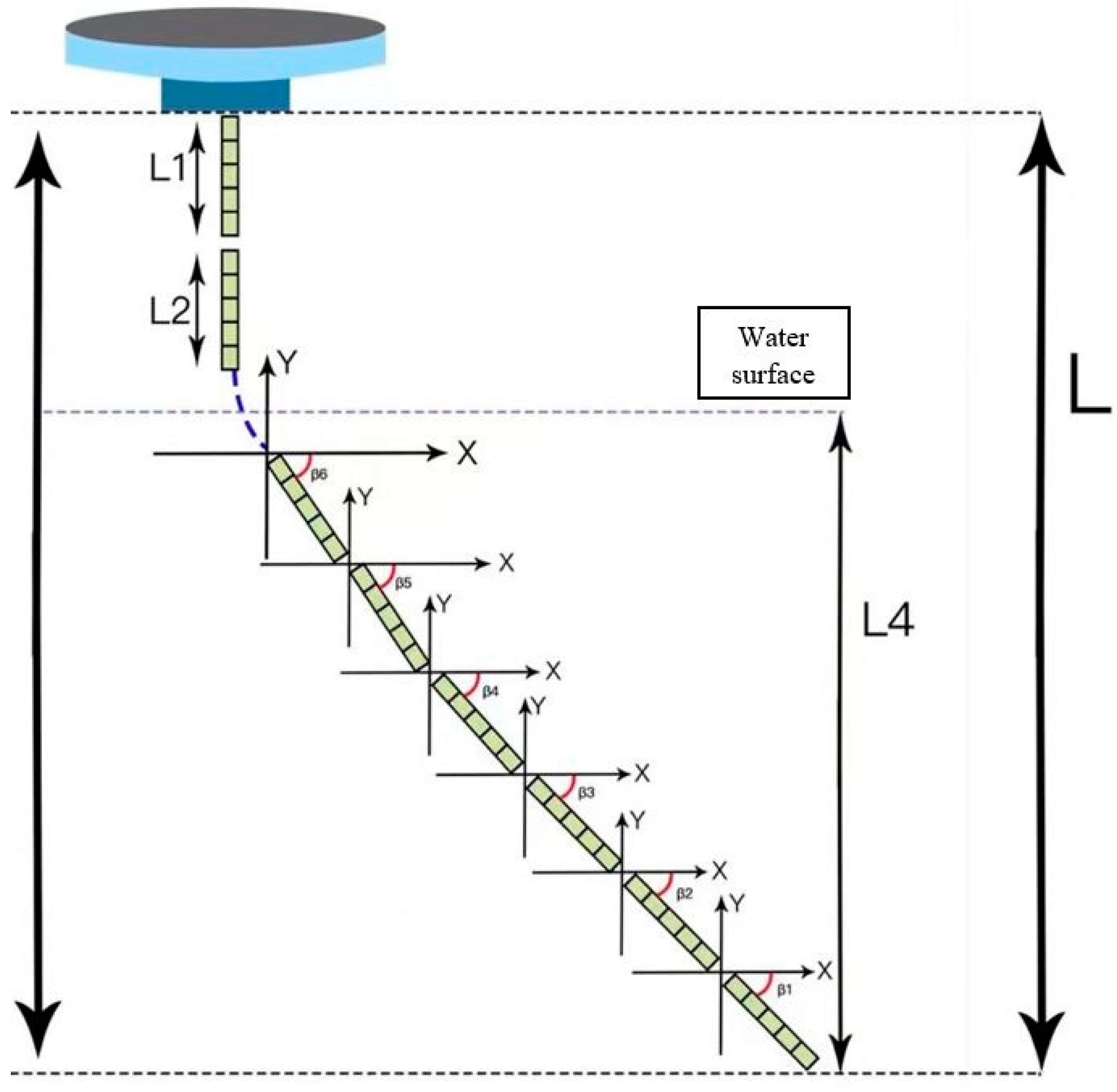
- Due to the different flow rates of water at different depths , the inclination angles of the flexible water gauges of different sections are different. Each angle sensor measures the inclination angle of the corresponding flexible water gauge and transmits it to the control module. The control module converts the calculation of into the calculated value , and applies the Formula (11) to obtainThe Formulas (13) and (14), and the corresponding first correction coefficient and second correction coefficient , are stored in the control module to form a calculation model, so it is only necessary to transmit the angle value detected by the angle sensor in real-time to the control module, and then the flow rate of the water flow can be obtained.
2.3. Manhole Cover Terminal Equipment Flow Rate Calibration
Standard Flow Meter
- v: flow velocity (average flow velocity during the period), m/s;
- a: flow meter constant, m/s;
- b: propeller hydraulic pitch, m;
- n: velocity meter rotor speed, .
- R: total number of rotors of flow meter;
- T: speed measurement duration, s.
- N: the number of signals in the T period.
3. Result
3.1. Water Level Accuracy Experiment
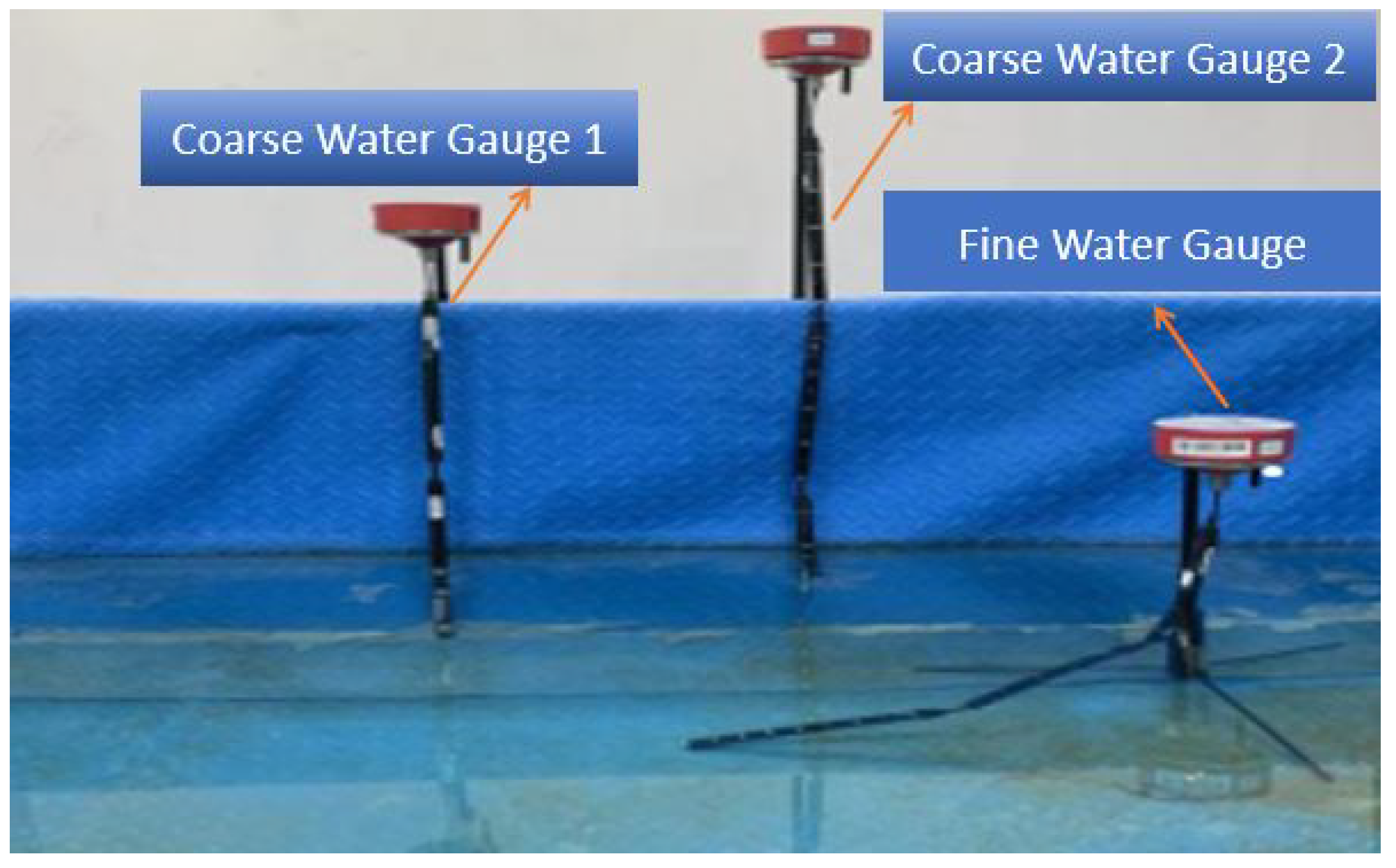
- (1)
- The water gauge does not touch the water surface, and the fine water gauge 1 is positioned above the water surface.
- (2)
- The water level is within the range of the fine water ruler 1, with the submersion depth of fine water ruler 1 falling between 0 and 250 mm.
- (3)
- The water level is not higher than the fine water gauge 1 but lies between the coarse water gauge 2. The submersion depth of the fine water gauge 1 ranges from 250 mm to 500 mm.
- (4)
- The water level is not higher than both the fine water gauge 1 and coarse water gauge 2 but falls within the coarse water gauge 1. The submersion depth of the fine water gauge 1 ranges from 500 mm to 750 mm.
- (5)
- The water surface is below the fine water gauge 1, coarse water gauge 2, and coarse water gauge 1. The submersion depth of the fine water gauge 1 is more than 750 mm. Currently, the water surface exceeds the maximum range of the device, and the water surface height display is set to 750 mm. Three sets of experiments are conducted for each water gauge situation, and the experimental data of the immersion depth of the equipment prototype in the APP is presented in Table 3 below.
3.2. Verification Experiment of Flexible Smart Water Gauge Flow Rate
3.3. Implementation of Intelligent Manhole Cover Monitoring System
4. Discussion
4.1. Accuracy Test
4.1.1. Velocity Accuracy Test
4.1.2. Error Analysis
4.1.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Z.; Zhou, Y.; Liu, H.; Gao, H. In-situ water level measurement using NIR-imaging video camera. Flow Meas. Instrum. 2019, 67, 95–106. [Google Scholar] [CrossRef]
- Lee, H.K.; Choo, J.; Shin, G.; Kim, S.M. On-site water level measurement method based on wavelength division multiplexing for harsh environments in nuclear power plants. Nucl. Eng. Technol. 2020, 52, 2847–2851. [Google Scholar] [CrossRef]
- Huang, Q.; Long, D.; Du, M.; Zeng, C.; Li, X.; Hou, A.; Hong, Y. An improved approach to monitoring Brahmaputra River water levels using retracked altimetry data. Remote Sens. Environ. 2018, 211, 112–128. [Google Scholar] [CrossRef]
- de Vitry, M.M.; Leitão, J.P. The potential of proxy water level measurements for calibrating urban pluvial flood models. Water Res. 2020, 175, 115669. [Google Scholar] [CrossRef]
- Schelfaut, K.; Pannemans, B.; Van der Craats, I.; Krywkow, J.; Mysiak, J.; Cools, J. Bringing flood resilience into practice: The FREEMAN project. Environ. Sci. Policy 2011, 14, 825–833. [Google Scholar] [CrossRef]
- Mu, D.; Luo, P.; Lyu, J.; Zhou, M.; Huo, A.; Duan, W.; Nover, D.; He, B.; Zhao, X. Impact of temporal rainfall patterns on flash floods in Hue City, Vietnam. J. Flood Risk Manag. 2021, 14, 12668. [Google Scholar] [CrossRef]
- Luo, P.; Mu, D.; Xue, H.; Ngo-Duc, T.; Dang-Dinh, K.; Takara, K.; Nover, D.; Schladow, G. Flood inundation assessment for the Hanoi Central Area, Vietnam under historical and extreme rainfall conditions. Sci. Rep. 2018, 8, 12623. [Google Scholar] [CrossRef]
- Lin, T.; Liu, X.; Song, J.; Zhang, G.; Jia, Y.; Tu, Z.; Zheng, Z.; Liu, C. Urban waterlogging risk assessment based on internet open data: A case study in China. Habitat Int. 2018, 71, 88–96. [Google Scholar] [CrossRef]
- Sun, S.; Zhai, J.; Li, Y.; Huang, D.; Wang, G. Urban waterlogging risk assessment in well-developed region of Eastern China. Phys. Chem. Earth 2018, 115, 102824. [Google Scholar] [CrossRef]
- Hu, S.L.; Han, C.F.; Meng, L.P. A scenario planning approach for propositioning rescue centers for urban waterlog disasters. Comput. Ind. Eng. 2015, 87, 425–435. [Google Scholar] [CrossRef]
- Tang, X.; Hong, H.; Shu, Y.; Tang, H.; Li, J.; Liu, W. Urban waterlogging susceptibility assessment based on a PSO-SVM method using a novel repeatedly random sampling idea to select negative samples. J. Hydrol. 2019, 576, 583–595. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, P. Comprehensive planning of drainage and waterlogging prevention layout based on urban double repair concept. Desalin. Water Treat. 2022, 268, 285–295. [Google Scholar] [CrossRef]
- Ning, Y.F.; Dong, W.Y.; Lin, L.S.; Zhang, Q. Analyzing the causes of urban waterlogging and sponge city technology in China. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: West Philadelphia, PA, USA, 2017; Volume 59, p. 012047. [Google Scholar]
- Wu, J.; Zhang, D.; Chen, Y.; Zhao, Y. A coupled multi-model framework for waterlogging projection: Towards achieving sustainable development goal 11.5. Urban Clim. 2022, 46, 101305. [Google Scholar] [CrossRef]
- Su, M.; Zheng, Y.; Hao, Y.; Chen, Q.; Chen, S.; Chen, Z.; Xie, H. The influence of landscape pattern on the risk of urban water-logging and flood disaster. Ecol. Indic. 2018, 92, 133–140. [Google Scholar] [CrossRef]
- Yin, Z.E.; Yin, J.; Xu, S.; Wen, J. Community-based scenario modelling and disaster risk assessment of urban rainstorm waterlogging. J. Geogr. Sci. 2011, 21, 274–284. [Google Scholar] [CrossRef]
- Colombo, A.F.; Karney, B.W. Evaluation of the long-term energy costs of leaks in buried pipeline systems. In Underground Infrastructure Research; CRC Press: Boca Raton, FL, USA, 2020; pp. 197–201. [Google Scholar]
- Martini, A.; Troncossi, M.; Rivola, A. Automatic leak detection in buried plastic pipes of water supply networks by means of vibration measurements. Shock Vib. 2015, 2015, 165304. [Google Scholar] [CrossRef]
- Rockwell, D. The influence of groundwater on surfaceflow erosion processes during a rainstorm. Earth Surf. Process. Landf. 2002, 27, 495–514. [Google Scholar] [CrossRef]
- Tan, F.; Tan, W.; Yan, F.; Qi, X.; Li, Q.; Hong, Z. Model Test Analysis of Subsurface Cavity and Ground Collapse Due to Broken Pipe Leakage. Appl. Sci. 2022, 12, 13017. [Google Scholar] [CrossRef]
- Chen, X.; Chen, W.; Zhao, L.; Chen, Y. Influence of Buried Pipeline Leakage on the Development of Cavities in the Subgrade. Buildings 2023, 13, 1848. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Transdisciplinary Perspectives on Complex Systems: New Findings and Approaches; Springer: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar]
- Xia, H.; Liu, Z.; Efremochkina, M.; Liu, X.; Lin, C. Study on city digital twin technologies for sustainable smart city design: A review and bibliometric analysis of geographic information system and building information modeling integration. Sustain. Cities Soc. 2022, 84, 104009. [Google Scholar] [CrossRef]
- Masasi, B.; Frazier, R.S.; Taghvaeian, S. Review and Operational Guidelines for Portable Ultrasonic Flowmeters; Oklahoma Cooperative Extension Service: Stillwater, OK, USA, 2017. [Google Scholar]
- Eren, H. Behaviour of ultrasonic wavefront in multi-phase liquid flow measurements in dosed pipes. In Quality Measurement: The Indispensable Bridge between Theory and Reality (No Measurements? No Science! Joint Conference-1996, Proceedings of the IEEE Instrumentation and Measurement Technology Conference and IMEKO Tec, Brussels, Belgium, 4–6 June 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 1, pp. 663–666. [Google Scholar]
- Baker, R.C. Turbine and related flowmeters: I. industrial practice. Flow Meas. Instrum. 1991, 2, 147–161. [Google Scholar] [CrossRef]
- Baker, R.C. Flow Measurement Handbook: Industrial Designs, Operating Principles, Performance, and Applications; Cambridge University Press: Cambridge, UK, 2016; pp. 508–510. [Google Scholar]
- Chanson, H.; Aoki, S.I.; Maruyama, M. Unsteady air bubble entrainment and detrainment at a plunging breaker: Dominant time scales and similarity of water level variations. Coast. Eng. 2002, 46, 139–157. [Google Scholar] [CrossRef]
- Sadatomi, M.; Kawahara, A.; Matsuura, H.; Shikatani, S. Micro-bubble generation rate and bubble dissolution rate into water by a simple multi-fluid mixer with orifice and porous tube. Exp. Therm. Fluid Sci. 2012, 41, 23–30. [Google Scholar] [CrossRef]
- Lou, B.; Ni, Y.; Mao, M.; Wang, P.; Cong, Y. Optimization of the kinematic model for biomimetic robotic fish with rigid headshaking mitigation. Robotics 2017, 6, 30. [Google Scholar] [CrossRef]
- Cai, Y.; Bi, S.; Zheng, L. Design optimization of a bionic fish with multi-joint fin rays. Adv. Robot. 2012, 26, 177–196. [Google Scholar] [CrossRef]
- Yan, Z.; Yang, H.; Zhang, W.; Lin, F.; Gong, Q.; Zhang, Y. Bionic fish tail design and trajectory tracking control. Ocean Eng. 2022, 257, 111659. [Google Scholar] [CrossRef]
- Verification/Calibration Method of Rotating-Element Current Meters in Straight Open Tank. GB/T21699-2008; China National Standardization Administration Committee: Beijing, China, 2008.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Level | Water Level | Handling the Situation |
|---|---|---|
| The water level rises over 20 cm within 15 min. | Abnormal | Immediate processing |
| The water level is greater than 2/3 of node height. | Abnormal | Immediate processing |
| Another condition. | Normal | Not processing |
| Serial Number | Items | Design Index |
|---|---|---|
| 1 | Water level measurement range | 0–5000 mm |
| 2 | Water level measurement accuracy | 10 mm, 50 mm |
| 3 | Minimum working range | 250 mm |
| 4 | Coarse/fine water gauge deflection angle | 0~180° |
| 5 | Coarse/fine water gauge deflection angle accuracy | ±2° |
| 6 | Maximum operating temperature | 70 °C |
| 7 | Minimum operating temperature | −20 °C |
| 8 | Waterproof level | IP68 level |
| 9 | Length of Water Gauge | It can be extended by cascading |
| Serial Number | Actual Immersion Depth (mm) | Uploaded Data Size (mm) | Whether it Meets the Accuracy Requirements |
|---|---|---|---|
| 1 | −35 | 0 | Yes |
| 2 | −100 | 0 | Yes |
| 3 | −180 | 0 | Yes |
| 4 | 35 | 30 | Yes |
| 5 | 100 | 100 | Yes |
| 6 | 180 | 150 | Yes |
| 7 | 280 | 250 | Yes |
| 8 | 330 | 300 | Yes |
| 9 | 480 | 450 | Yes |
| 10 | 540 | 500 | Yes |
| 11 | 610 | 600 | Yes |
| 12 | 680 | 650 | Yes |
| 13 | 760 | 700 | Yes |
| 14 | 800 | 700 | Yes |
| 15 | 850 | 700 | Yes |
| Serial Number | Standard Flow Meter (m/s) | Flexible Smart Water Gauge (m/s) | Error (m/s) |
|---|---|---|---|
| 1 | 0.298 | 0.282 | 0.016 |
| 2 | 0.289 | 0.273 | 0.016 |
| 3 | 0.312 | 0.301 | 0.011 |
| 4 | 0.309 | 0.280 | 0.029 |
| 5 | 0.331 | 0.321 | 0.012 |
| 6 | 0.333 | 0.322 | 0.011 |
| 7 | 0.324 | 0.312 | 0.012 |
| 8 | 0.247 | 0.210 | 0.037 |
| 9 | 0.259 | 0.220 | 0.039 |
| 10 | 0.265 | 0.252 | 0.013 |
| Serial Number | Rainwater | Water Level Information (mm) | Flow Velocity (m/s) | Status | Time |
|---|---|---|---|---|---|
| 1 | Rain 001 | 25 | 0.521 | Normal | 0309–10:00 |
| 2 | Rain 002 | 25 | 0.498 | Normal | 0309–10:00 |
| 3 | Rain 003 | 4 | 0.112 | Normal | 0309–10:00 |
| 4 | Rain 004 | 3 | 0.153 | Normal | 0309–10:00 |
| 5 | Rain 005 | 8 | 0.246 | Normal | 0309–09:45 |
| 6 | Rain 006 | 25 | 0.486 | Normal | 0309–10:00 |
| 7 | Rain 007 | 2 | 0.102 | Normal | 0309–09:45 |
| 8 | Rain 008 | 10 | 0.368 | Normal | 0309–10:00 |
| 9 | Rain 0019 | 6 | 0.210 | Normal | 0309–10:00 |
| 10 | Rain 0010 | 2 | 0.104 | Normal | 0309–10:00 |
| Serial Number | Standard Value (m/s) | Measured Value (m/s) | Measured Value (m/s) | Measured Value (m/s) | Measured Value (m/s) | Measured Value (m/s) | Average Value (m/s) | Error (m/s) |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.0500 | 0.0305 | 0.0515 | 0.0515 | 0.0535 | 0.0435 | 0.0461 | 0.0039 |
| 2 | 0.1000 | 0.0965 | 0.0915 | 0.0907 | 0.0952 | 0.1091 | 0.0966 | 0.0034 |
| 3 | 0.2000 | 0.2158 | 0.2251 | 0.1978 | 0.1925 | 0.1895 | 0.2041 | 0.0041 |
| 4 | 0.5000 | 0.5346 | 0.5103 | 0.4895 | 0.4917 | 0.5037 | 0.5059 | 0.0059 |
| 5 | 1.0000 | 1.0710 | 1.0958 | 0.9726 | 0.9573 | 1.0214 | 1.0236 | 0.0236 |
| 6 | 2.0000 | 2.0345 | 2.0176 | 1.9875 | 1.9936 | 2.0287 | 2.0123 | 0.0123 |
| 7 | 2.5000 | 2.4987 | 2.4865 | 2.5170 | 2.5213 | 2.4985 | 2.5044 | 0.004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sebicho, S.W.; Lou, B.; Anito, B.S. A Multi-Parameter Flexible Smart Water Gauge for the Accurate Monitoring of Urban Water Levels and Flow Rates. Eng 2024, 5, 198-216. https://doi.org/10.3390/eng5010011
Sebicho SW, Lou B, Anito BS. A Multi-Parameter Flexible Smart Water Gauge for the Accurate Monitoring of Urban Water Levels and Flow Rates. Eng. 2024; 5(1):198-216. https://doi.org/10.3390/eng5010011
Chicago/Turabian StyleSebicho, Selamu Wolde, Baodong Lou, and Bethel Selamu Anito. 2024. "A Multi-Parameter Flexible Smart Water Gauge for the Accurate Monitoring of Urban Water Levels and Flow Rates" Eng 5, no. 1: 198-216. https://doi.org/10.3390/eng5010011
APA StyleSebicho, S. W., Lou, B., & Anito, B. S. (2024). A Multi-Parameter Flexible Smart Water Gauge for the Accurate Monitoring of Urban Water Levels and Flow Rates. Eng, 5(1), 198-216. https://doi.org/10.3390/eng5010011