



Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells

 , ,
, , 
Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Scope and Problem Formulation
2. State-of-the-Art
2.1. Solar Cells
2.2. Solar Power Management System
2.3. Airframe Concept
2.3.1. Wing Design
2.3.2. Flying-Wing
3. SPUAV Initial Concept
3.1. Project Requirements
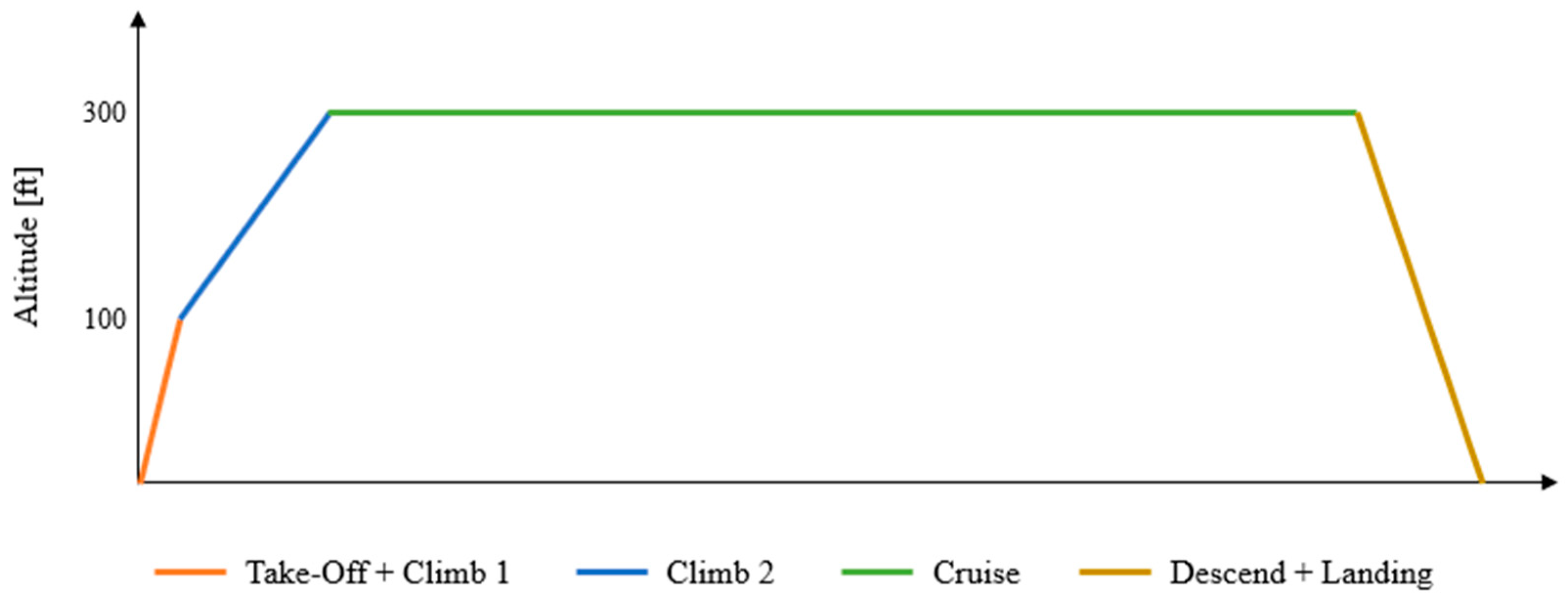
3.2. Mission Profile
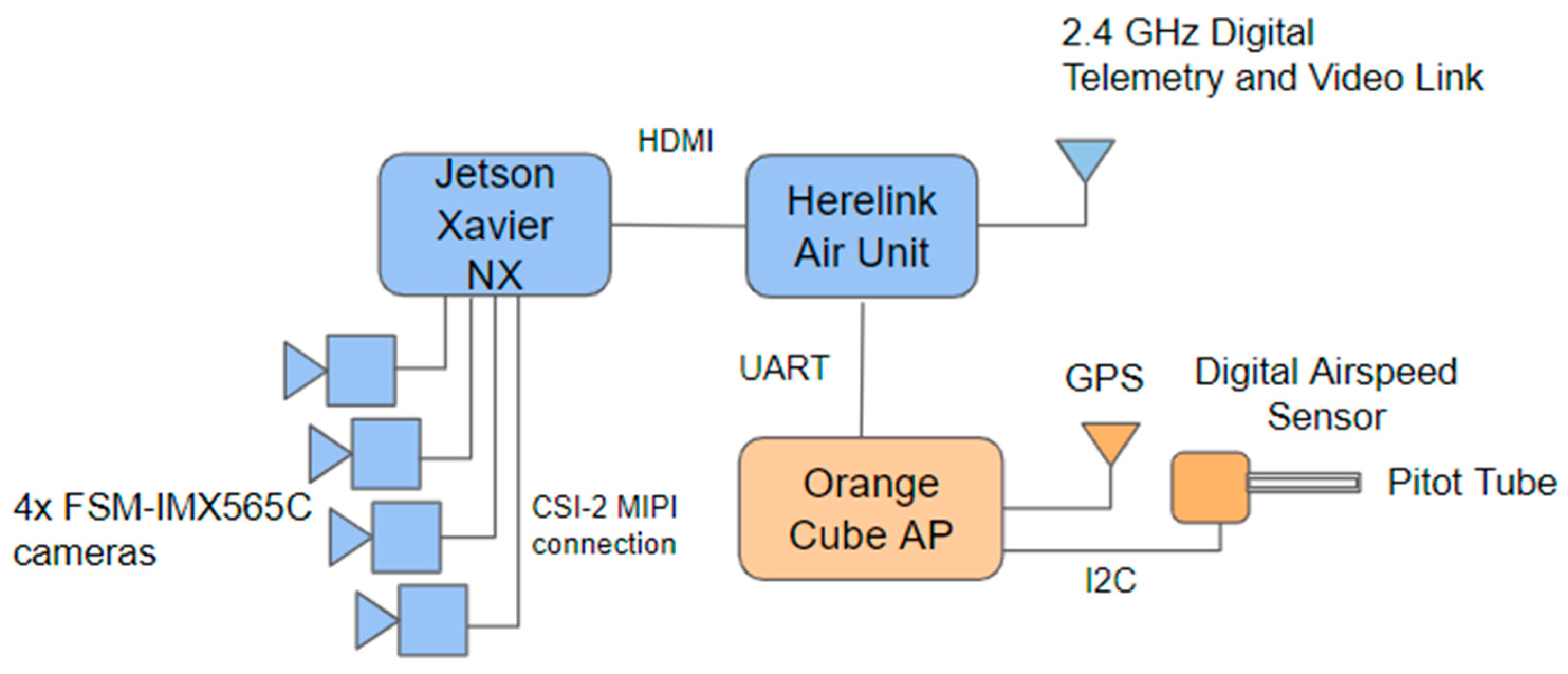
3.3. SPUAV Components
4. Conceptual Design
4.1. Input Variables
4.2. Inner and Outer Iterative Cycles
4.3. Conceptual Design Outcome
5. Airframe Design and Energy System
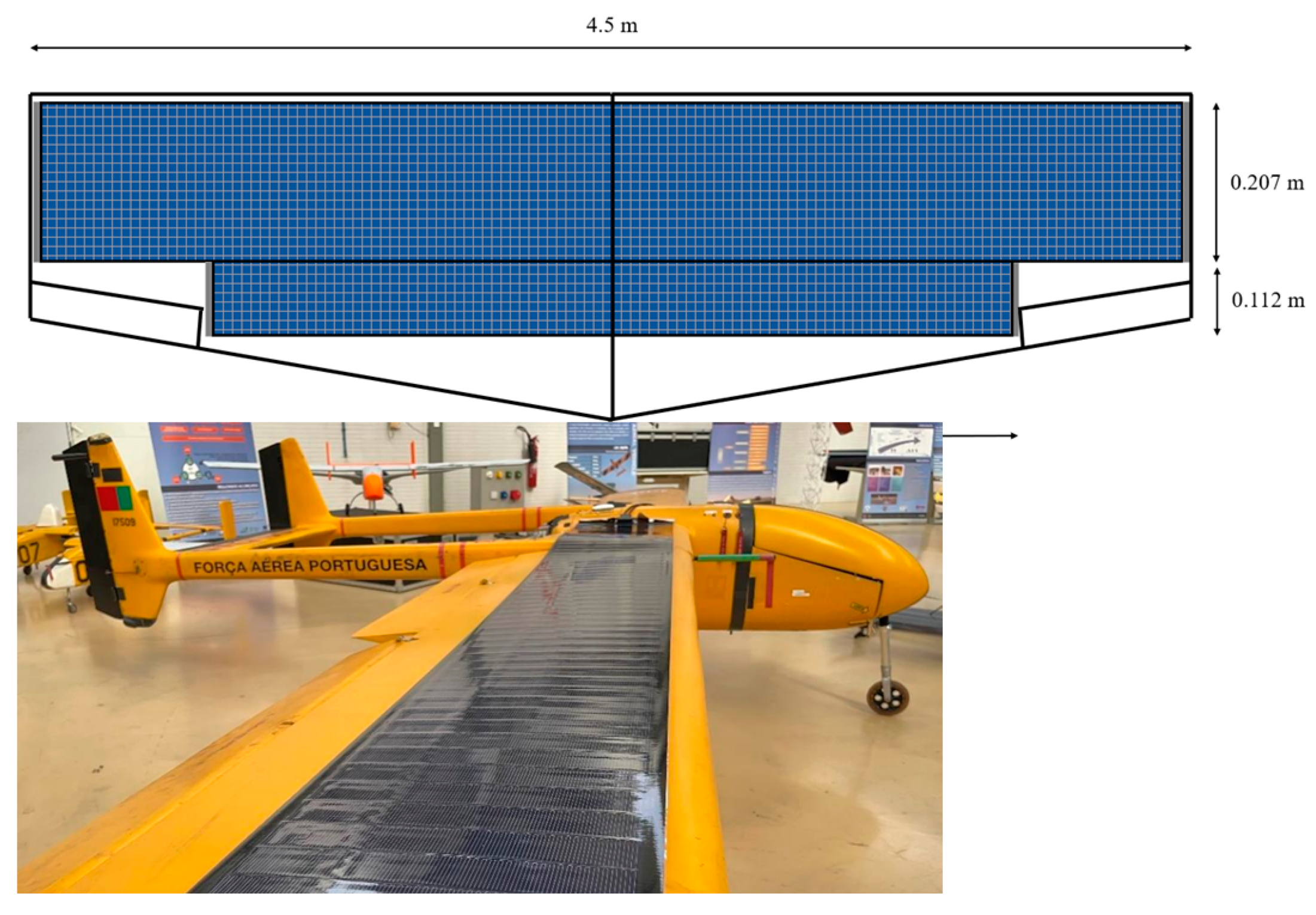
5.1. Airframe Design
Drag Estimation
5.2. SPMS
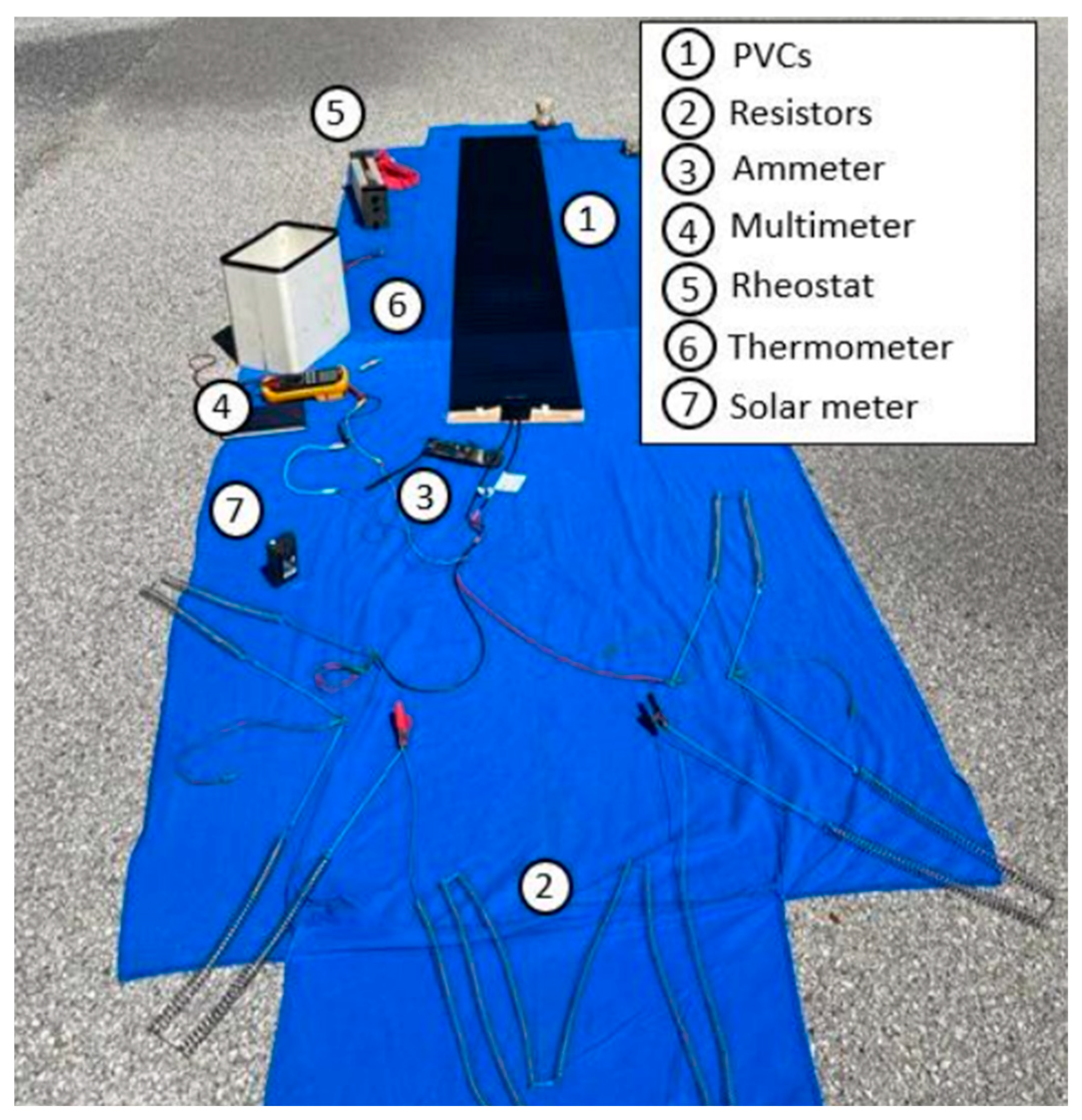
6. Experiments
6.1. Experimental Constraints
6.2. Battery Discharge
6.3. Battery Charge with MPPT
6.4. Flight Profile with DC Power Source
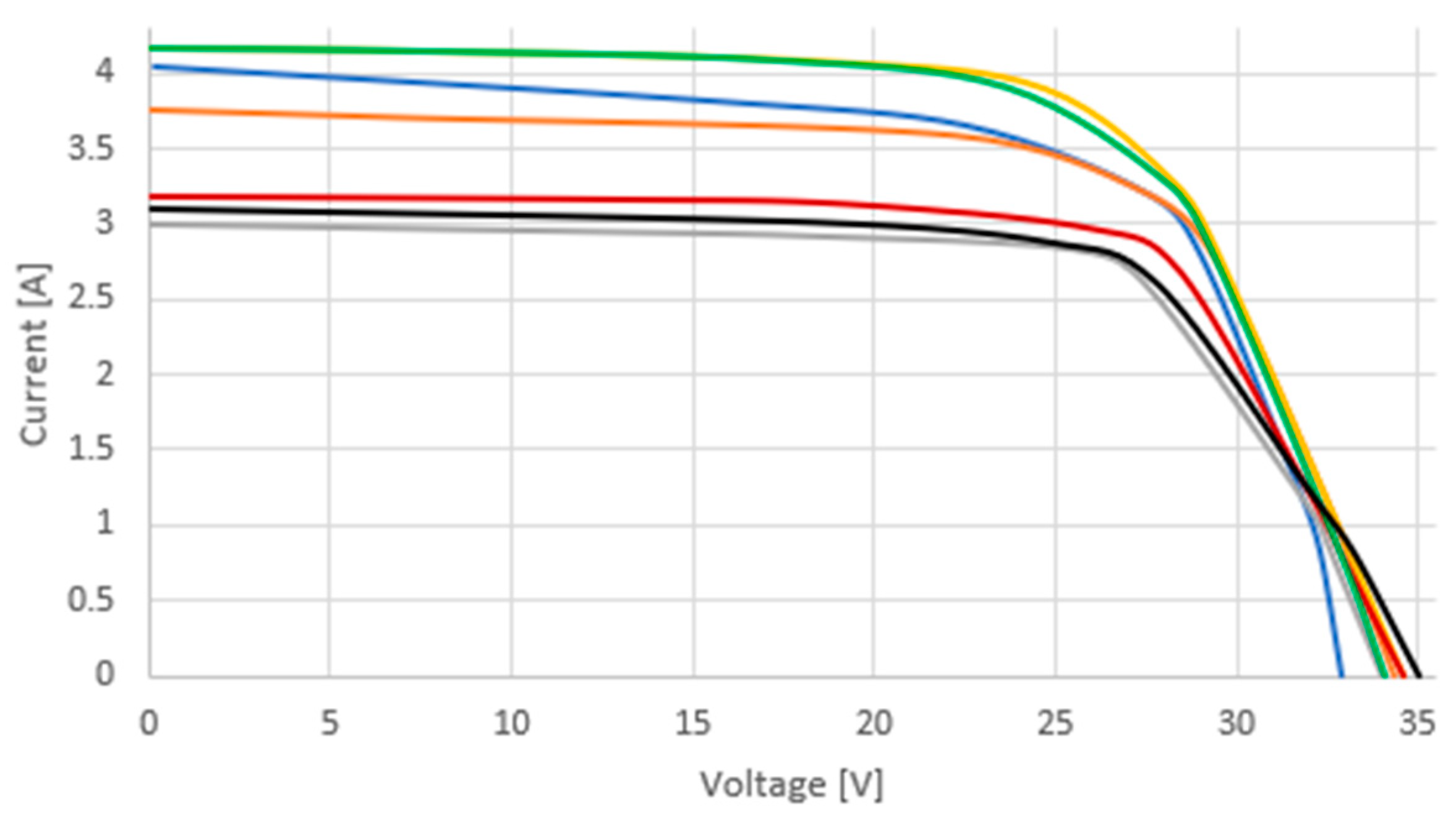
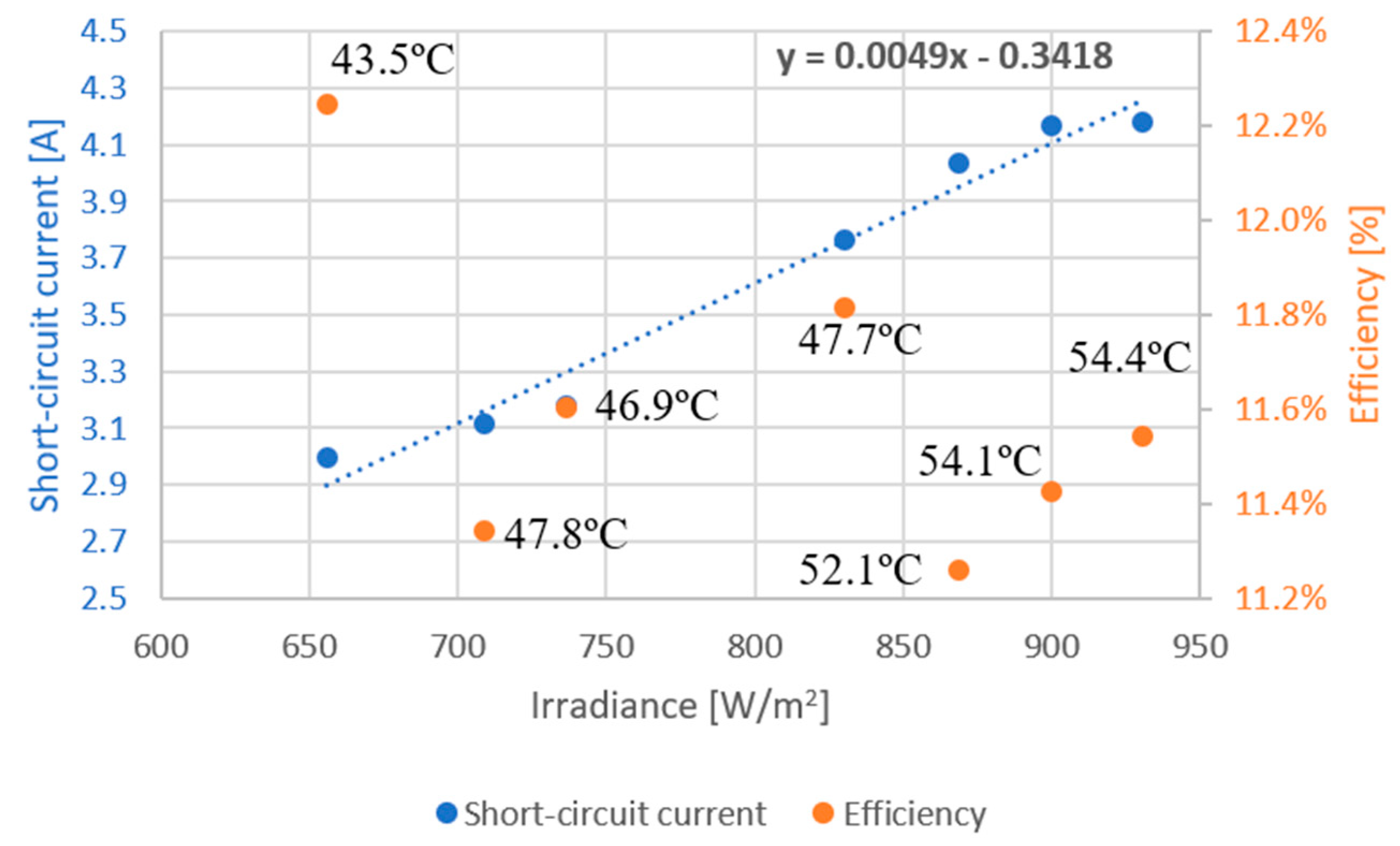
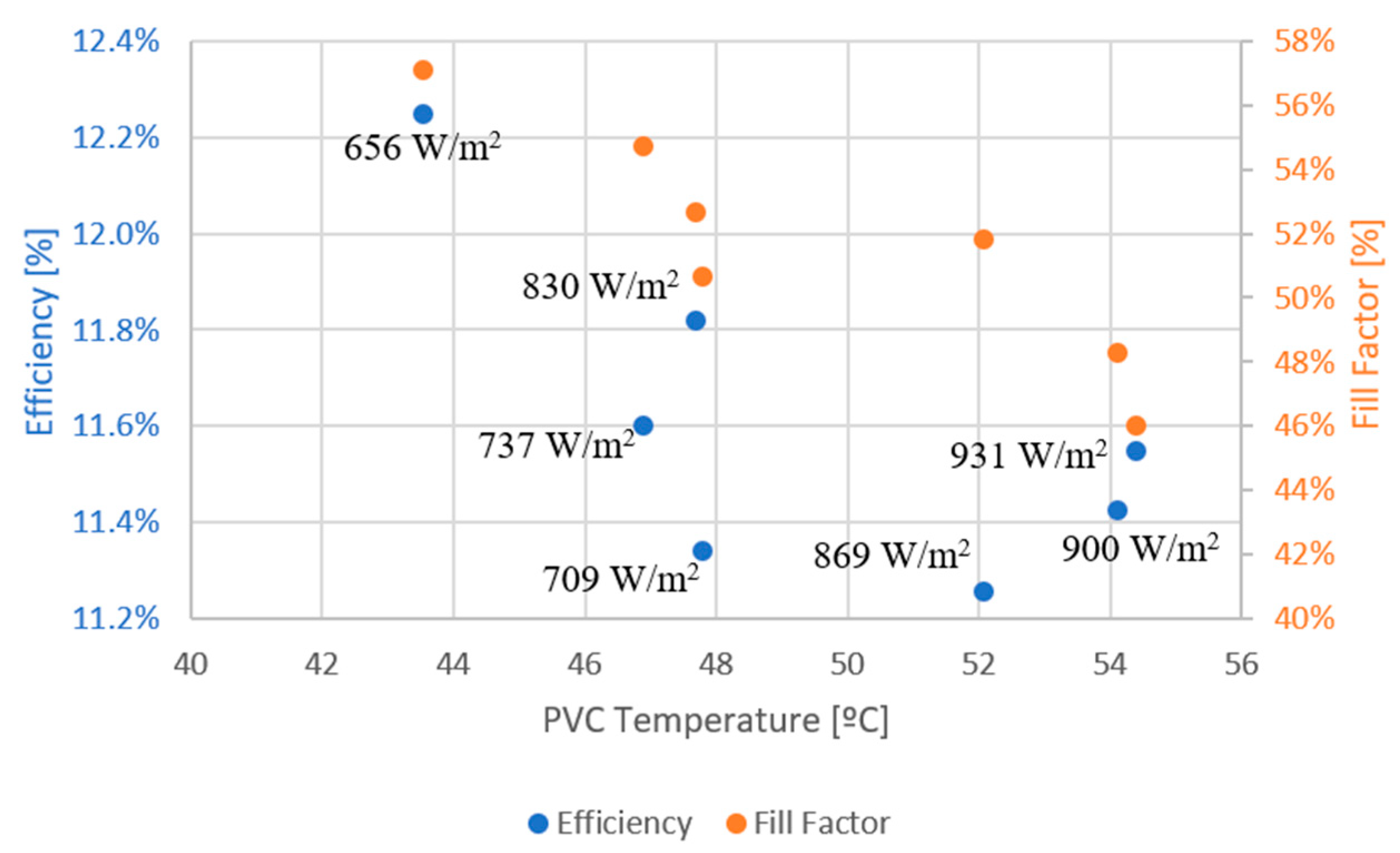
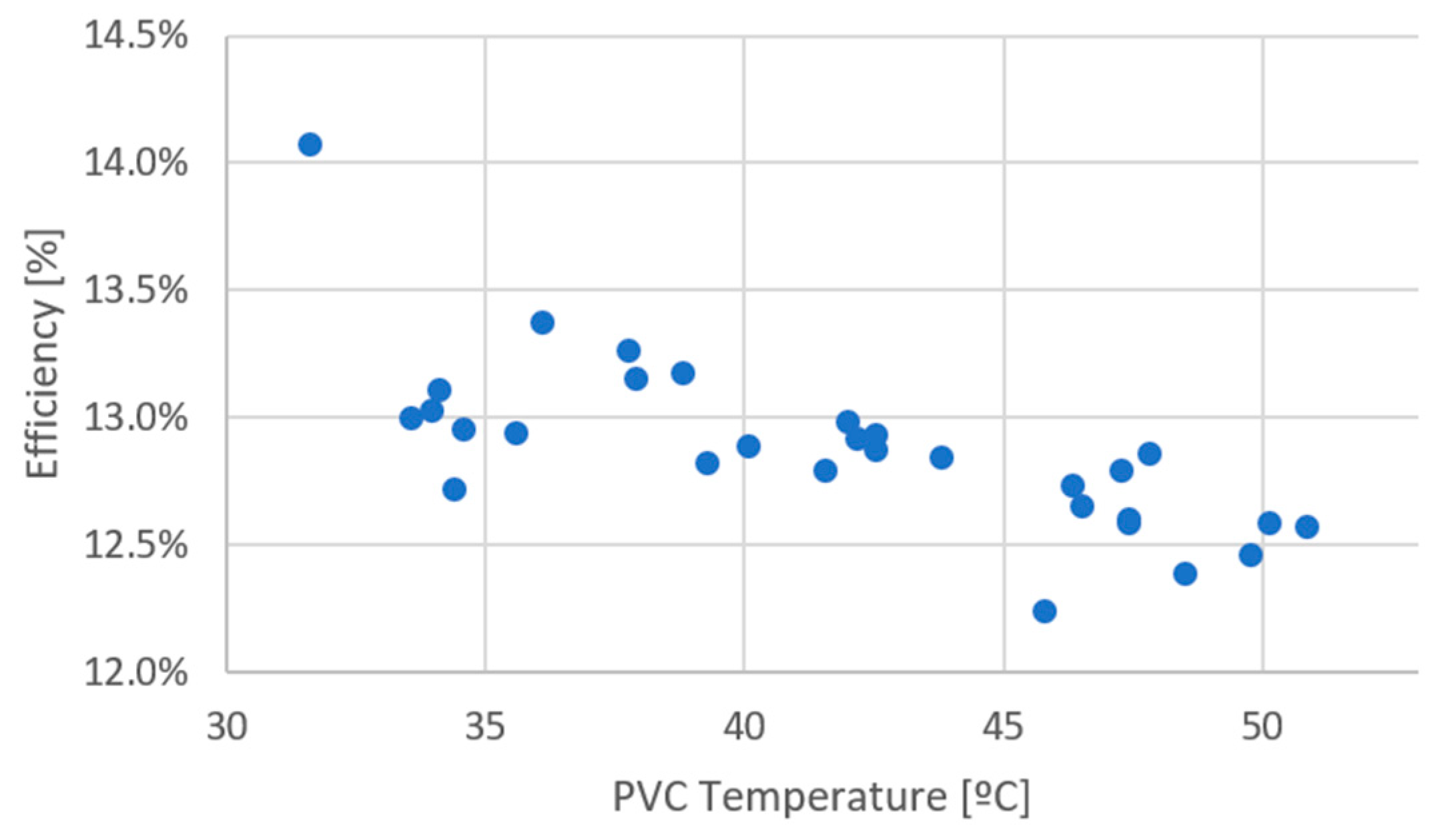
6.5. PVCs Electrical Characteristics
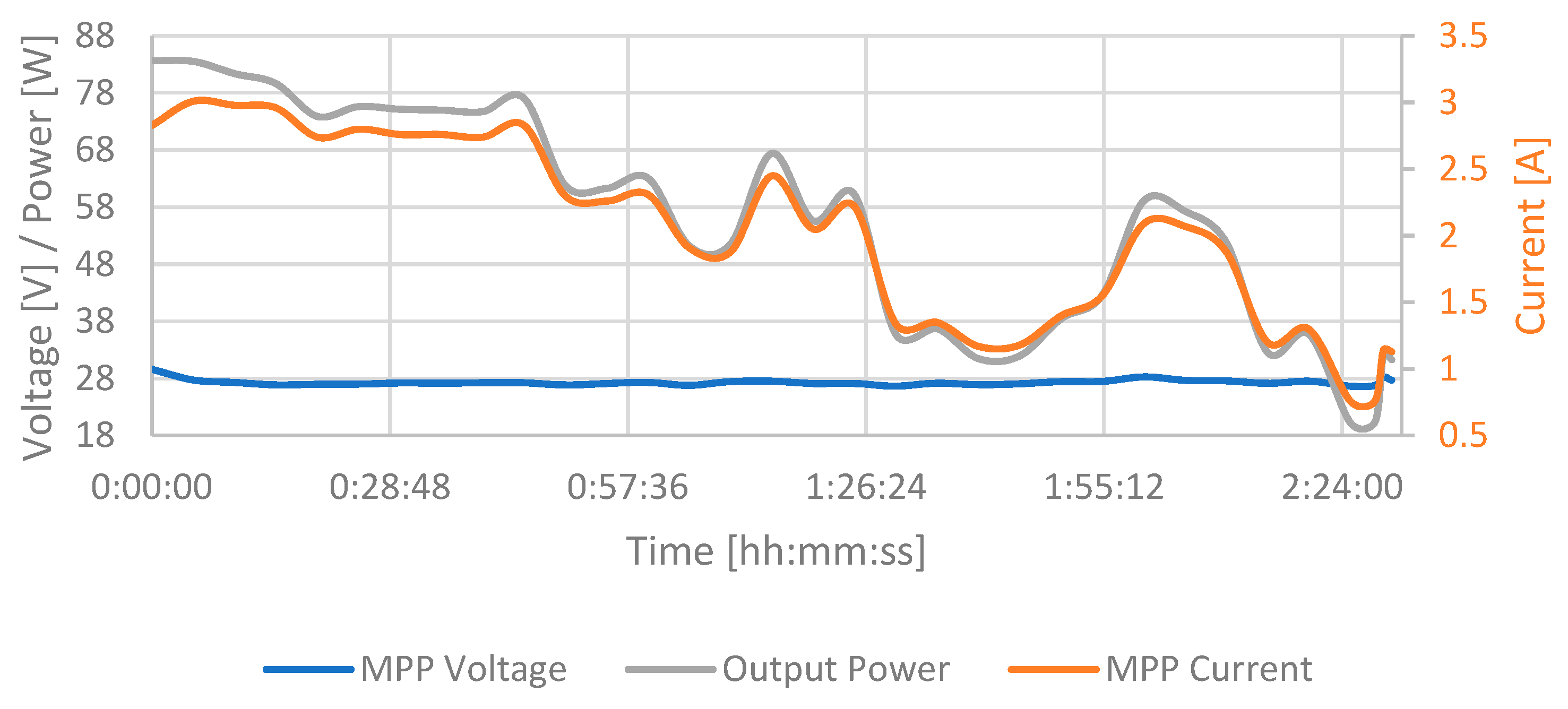
6.6. Flight Profile with PVCs
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dui, H.; Zhang, C.; Bai, G.; Chen, L. Mission reliability modeling of UAV swarm and its structure optimization based on importance measure. Reliab. Eng. Syst. Saf. 2021, 215, 107879. [Google Scholar] [CrossRef]
- Thirugnanasambandam, M.; Iniyan, S.; Goic, R. A review of solar thermal technologies. Renew. Sustain. Energy Rev. 2010, 14, 312–322. [Google Scholar] [CrossRef]
- Boucher, R.J. History of solar flight. In Proceedings of the Em AIAA/SAE/ASEE 20th Joint Propulsion Conference, Cincinnati, OH, USA, 11–13 June 1984. [Google Scholar] [CrossRef]
- Shiau, J.K.; Ma, D.M.; Yang, P.Y.; Wang, G.F.; Gong, J.H. Design of a solar power management system for an experimental UAV. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1350. [Google Scholar] [CrossRef]
- de Carvalho Bertoli, G.; Pacheco, G.M.; Adabo, G.J. Extending flight endurance of electric unmanned aerial vehicles through photovoltaic system integration. In Proceedings of the Em 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 143–147. [Google Scholar]
- Chawla, R.; Singhal, P.; Garg, A.K. Photovoltaic review of all generations: Environmental impact and its market potential. Trans. Electr. Electron. Mater. 2020, 21, 456–476. [Google Scholar] [CrossRef]
- Ya’u Muhammad, J.; Bello Waziri, A.; Muhammad Shitu, A.; Muhammad Ahmad, U.; Hassan Muhammad, M.; Alhaji, Y.; Taofeek Olaniyi, A.; Abdulkadir Bala, A. Recent progressive status of materials for solar photovoltaic cell: A comprehensive review. Sci. J. Energy Eng. 2019, 7, 77. [Google Scholar] [CrossRef]
- NREL Best Research-Cell Efficiency Chart. Photovoltaic Research. 2022. Available online: https://www.nrel.gov/pv/cell-efficiency.html (accessed on 1 June 2023).
- Mitzi, D.B.; Yuan, M.; Liu, W.; Kellock, A.J.; Chey, S.J.; Gignac, L.; Schrott, A.G. Hydrazine-based deposition route for device-quality CIGS films. Thin Solid Film. 2009, 517, 2158–2162. [Google Scholar] [CrossRef]
- Green, M.A. Third generation photovoltaics: Ultra-high conversion efficiency at low cost. Prog. Photovolt. Res. Appl. 2001, 9, 123–135. [Google Scholar] [CrossRef]
- Teixeira, C.O.; Andrade, L.; Mendes, A. Easy processing carbon paper electrode for highly efficient perovskite solar cells. J. Power Sources 2020, 479, 229071. [Google Scholar] [CrossRef]
- Smith, A.B.; Jones, C.D. Modern Photovoltaics: Principles and Applications. Energy Sci. J. 2024, 30, 123–134. [Google Scholar]
- Lee, H.Y. Multi-Junction Solar Cells: The Future of Solar Energy. Renew. Energy Rev. 2023, 17, 45–60. [Google Scholar]
- Green, M.; Brown, S. Thin-Film Solar Cells: Materials and Technologies. Sol. Energy Mater. 2024, 29, 321–333. [Google Scholar]
- Patel, R.; Kumar, S. Organic Photovoltaics and Dye-Sensitized Solar Cells. J. Sol. Energy Eng. 2023, 31, 210–225. [Google Scholar]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery health management system for electric UAVs. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 5–12 May 2011. [Google Scholar] [CrossRef]
- Hohm, D.P.; Ropp, M.E. Comparative study of maximum power point tracking algorithms. Prog. Photovolt. Res. Appl. 2003, 11, 47–62. [Google Scholar] [CrossRef]
- Zhang, X.; Li, M. Beyond Lithium-Ion: Emerging Battery Technologies for Solar Applications. Battery Sci. 2024, 12, 134–145. [Google Scholar]
- Kim, D.E.; Park, S.H. Advances in Battery Management Systems for Renewable Energy. Energy Storage 2023, 8, 50–65. [Google Scholar]
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the Em IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 Septemeber–2 October 2015; pp. 2460–2466. [Google Scholar] [CrossRef]
- Butler, C.; Costello, M. Vehicle design in aerial robotics. Curr. Robot. Rep. 2021, 2, 415–426. [Google Scholar] [CrossRef]
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef]
- D’Sa, R.; Henderson, T.; Jenson, D.; Calvert, M.; Heller, T.; Schulz, B.; Kilian, J.; Papanikolopoulos, N. Design and experiments for a transformable solar-UAV. In Proceedings of the Em Proceedings—IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 3917–3923. [Google Scholar] [CrossRef]
- Chen, W.; Liu, F. Carbon Fiber Composites in UAV Design. Aerosp. Mater. Handb. 2023, 22, 78–89. [Google Scholar]
- Murphy, K. Bio-Inspired UAV Design: Lessons from Nature. J. Aeronaut. 2024, 15, 150–162. [Google Scholar]
- Anderson, J.D. Aircraft Performance and Design. Thomas Casson. 1999. Available online: https://www.academia.edu/8768700/Anderson_aircraft_performance_and_design (accessed on 1 June 2023).
- Raymer, D. Aircraft Design: A Conceptual Approach, 6th ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Sadraey, M.H. Aircraft Design: A Systems Engineering Approach; Jones, R., Smith, L., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Gupta, A.; Kumar, N. Solar Integration in Aircraft Wings: Challenges and Prospects. Sol. Energy Eng. 2023, 25. [Google Scholar] [CrossRef]
- Parada LM, A.; Marta, A.C. Conceptual and Preliminary Design of a Long Endurance Electric UAV; Instituto Superior Técnico: Lisbon, Portugal, 2016; Available online: https://fenix.tecnico.ulisboa.pt/downloadFile/1970943312279037/LuisParada_ExtendedAbstract.pdf (accessed on 1 June 2023).
- Vidales, H.M.G.; Marta, A.C. Design, Construction and Test of the Propulsion System of a Solar UAV; Instituto Superior Técnico: Lisbon, Portugal, 2013; Available online: https://www.semanticscholar.org/paper/Design%2C-Construction-and-Test-of-the-Propulsion-of-Vidales/ebb26cb110ae0b1af30b5ab8f307d17d501f5c7f (accessed on 1 June 2023).
- Gieras, J.F. Design of permanent magnet brushless motors for high speed applications. In Proceedings of the 17th International Conference on Electrical Machines and Systems, ICEMS, Hangzhou, China, 22–25 October 2014. [Google Scholar] [CrossRef]
- Propeller Performance Data. APC Propellers. 2014. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 1 June 2023).
- Ferreira, T.; Marta, A.C.; Infante, V.I.M.N. Hybrid Propulsion System of a Long Endurance Electric UAV; Instituto Superior Técnico: Lisbon, Portugal, 2014. [Google Scholar]
- Mermer, E.; Koker, A.; Kurtulus, D.F.; Yilmaz, E.; Uzay, T. Design and performance of wing configurations for high altitude solar powered unmanned system. In Proceedings of the Ankara International Aerospace Conference, Ankara, Turkey, 11–13 September 2013; Available online: https://www.researchgate.net/publication/281461742 (accessed on 1 June 2023).
- Noth, A.; Siegwart, R.; Engel, W. Design of Solar Powered Airplanes for Continuous Flight. Ecole Polytechnique Fédéral de Lausanne. 2008. Available online: https://ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/asl-dam/documents/phd_thesis/Andre_Noth_Design_of_Solar_Powered_Airplanes_for_Continuous_Flight.pdf (accessed on 1 June 2023).
- Silva, R.; Félix, L.; Oliveira, T. Projeto Conceptual de Uma Aeronave Pequena de Baixo Custo para Aplicações em Controlo Cooperativo. Academia da Força Aérea. 2020. Available online: https://comum.rcaap.pt/bitstream/10400.26/39752/1/DissertacaoMestrado_ASPAL_PILAV_139418-F_Silva.pdf (accessed on 1 June 2023).
- Drela, M.; Youngren, H. XFOIL 6.94 User Guide (p. 33). 2001. Available online: http://clubmodelisme.free.fr/liens/files/xfoil/xfoil_doc.pdf (accessed on 1 June 2023).
- Götten, F.; Havermann, M.; Braun, C.; Gómez, F.; Bil, C. On the applicability of empirical drag estimation methods for unmanned air vehicle design. In Proceedings of the Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Castro, R.; Silva, M. Experimental and theoretical validation of one diode and three parameters-based pv models. Energies 2021, 14, 2140. [Google Scholar] [CrossRef]
- Song, Z.; Fang, K.; Sun, X.; Liang, Y.; Lin, W.; Xu, C.; Huang, G.; Yu, F. An effective method to accurately extract the parameters of single diode model of solar cells. Nanomaterials 2021, 11, 2615. [Google Scholar] [CrossRef] [PubMed]
- Torres, J.P.N.; Marques Lameirinhas, R.A.; Bernardo, C.V.; Catarina, P.; Veiga, H.I.; dos Santos, P.M. A discrete electrical model for photovoltaic solar cells—d1MxP. Energies 2023, 16, 2018. [Google Scholar] [CrossRef]
- Bernardes, S.; Lameirinhas, R.A.M.; Torres, J.P.N.; Fernandes, C.A. Characterization and design of photovoltaic solar cells that absorb ultraviolet, visible and infrared light. Nanomaterials 2021, 11, 78. [Google Scholar] [CrossRef]
- Pastuszak, J.; Węgierek, P. Photovoltaic cell generations and current research directions for their development. Materials 2022, 15, 5542. [Google Scholar] [CrossRef]
- Marques Lameirinhas, R.A.; Torres, J.P.N.; de Melo Cunha, J.P. A photovoltaic technology review: History, fundamentals and applications. Energies 2022, 15, 1823. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Requirement | Value | Description |
|---|---|---|
| MTOM | <25 kg | Preferable <10 kg |
| Wingspan | ≤4.5 m | - |
| Endurance | 6 h | - |
| Power | - | Battery, solar cells |
| Payload | - | Include 360° surveillance cameras. |
| Cruising speed | ≥8 m/s | - |
| Stall speed | - | 80% of cruising speed |
| Altitude | 300 ft | Above ground level |
| S | b | AR | MTOM | |||||
|---|---|---|---|---|---|---|---|---|
| 1.70 m2 | 1.27 m2 | 4.5 m | 11.9 | 4.33 kg | 80 W | 262 W | 5.7 m/s | 8 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sampaio Saloio, J.P.; Cruz, G.; Coelho, V.; N. Torres, J.P.; Marques Lameirinhas, R.A. Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells. Vehicles 2023, 5, 1863-1877. https://doi.org/10.3390/vehicles5040100
Sampaio Saloio JP, Cruz G, Coelho V, N. Torres JP, Marques Lameirinhas RA. Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells. Vehicles. 2023; 5(4):1863-1877. https://doi.org/10.3390/vehicles5040100
Chicago/Turabian StyleSampaio Saloio, João Pedro, Gonçalo Cruz, Vasco Coelho, João Paulo N. Torres, and Ricardo A. Marques Lameirinhas. 2023. "Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells" Vehicles 5, no. 4: 1863-1877. https://doi.org/10.3390/vehicles5040100
APA StyleSampaio Saloio, J. P., Cruz, G., Coelho, V., N. Torres, J. P., & Marques Lameirinhas, R. A. (2023). Experimental Study to Increase the Autonomy of a UAV by Incorporating Solar Cells. Vehicles, 5(4), 1863-1877. https://doi.org/10.3390/vehicles5040100