
Performance Analysis of Conventional IPMSM and NCPM Based IPMSM

 ,
, 
Abstract
:1. Introduction
- To examine the electro-deposition of a NiCuZn nanocomposite based on polyethylene glycol with permanent magnet material.
- The resulting coated permanent magnets’ magnetic characteristics are assessed using a hysteresis loop tester, and their microstructure is investigated using X-ray diffraction (XRD) and scanning electron microscopy (SEM). By using linear polarization, their corrosion resistance is assessed.
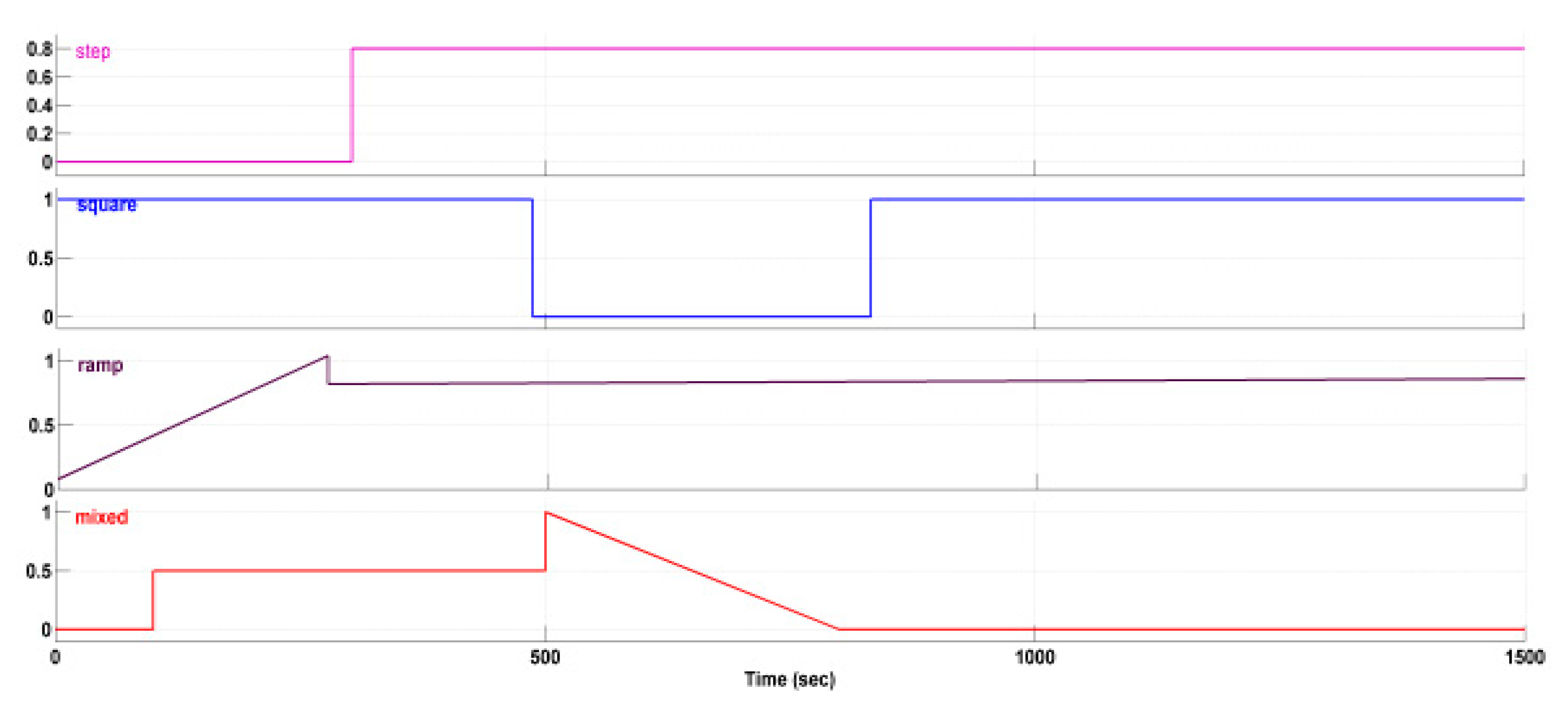
- A comparison of the performance of IPMSMs based on NCPM and those based on traditional IPMSM for various speed command types.
- A performance comparison between the proposed EV drive’s conventional IMPMSM drive and the DCMLI-fed NCPM-based IPMSM drive to show its effectiveness.
2. Nano-Composite with PM Material
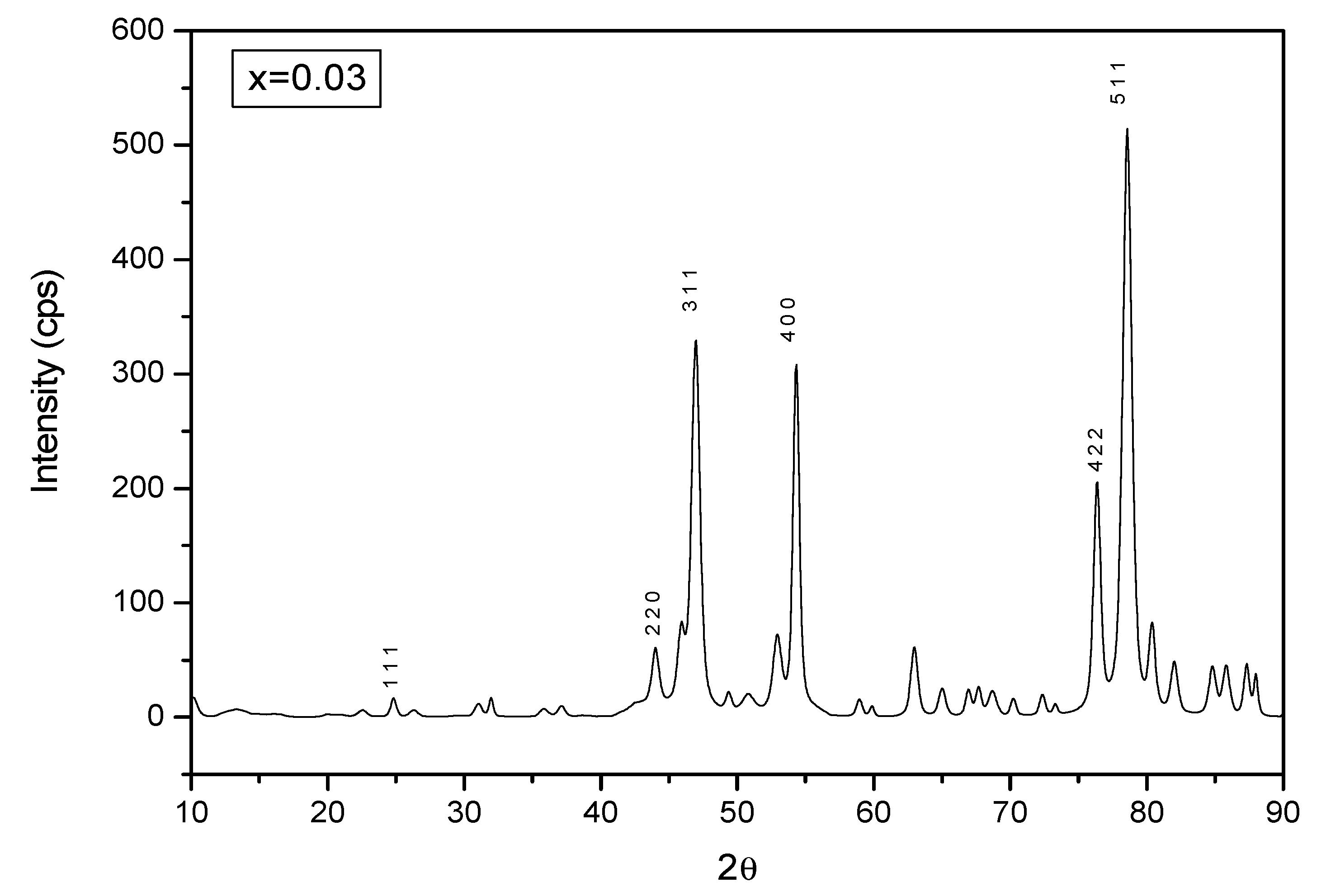
2.1. XRD Pattern
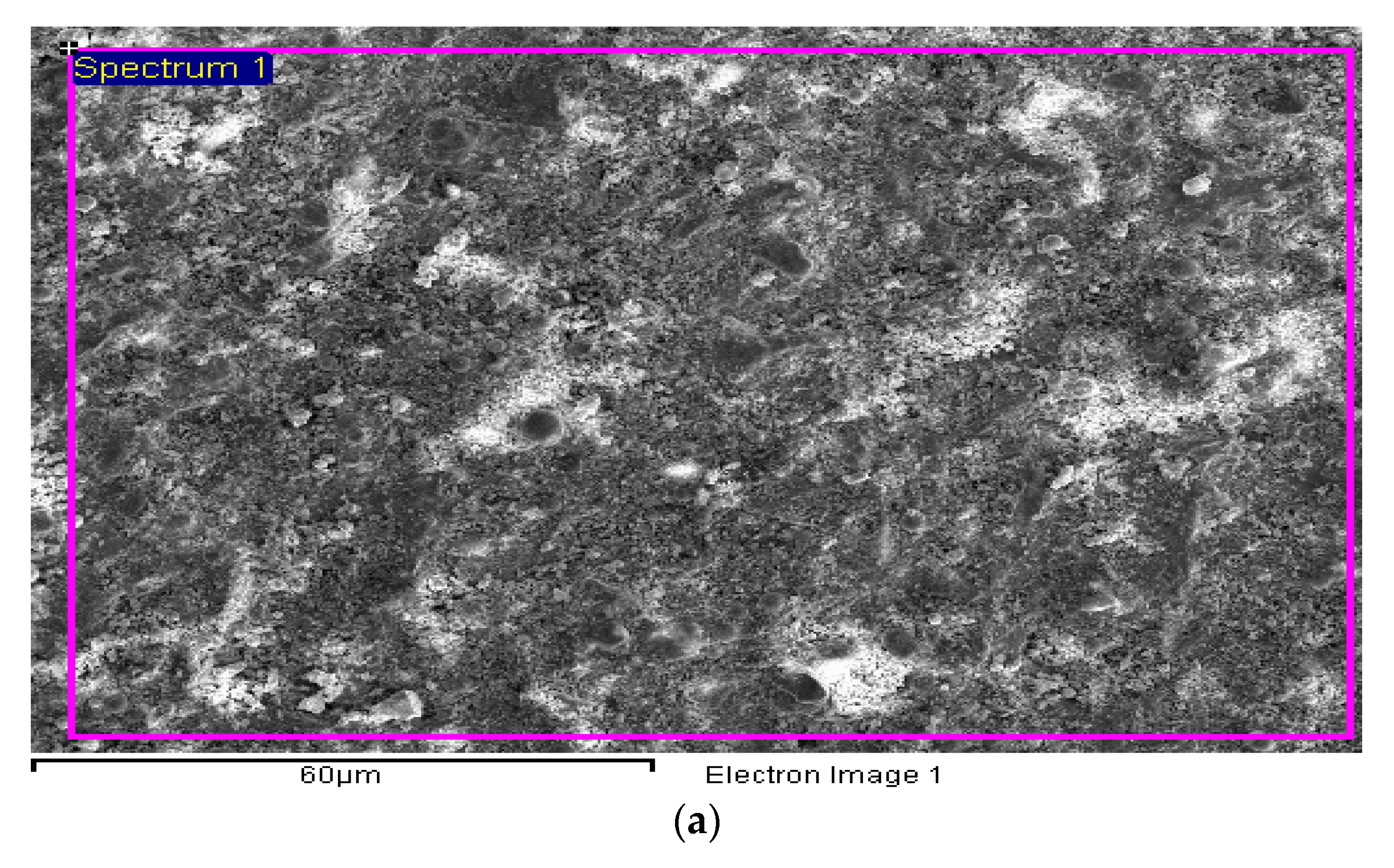
2.2. SEM and EDX Analysis
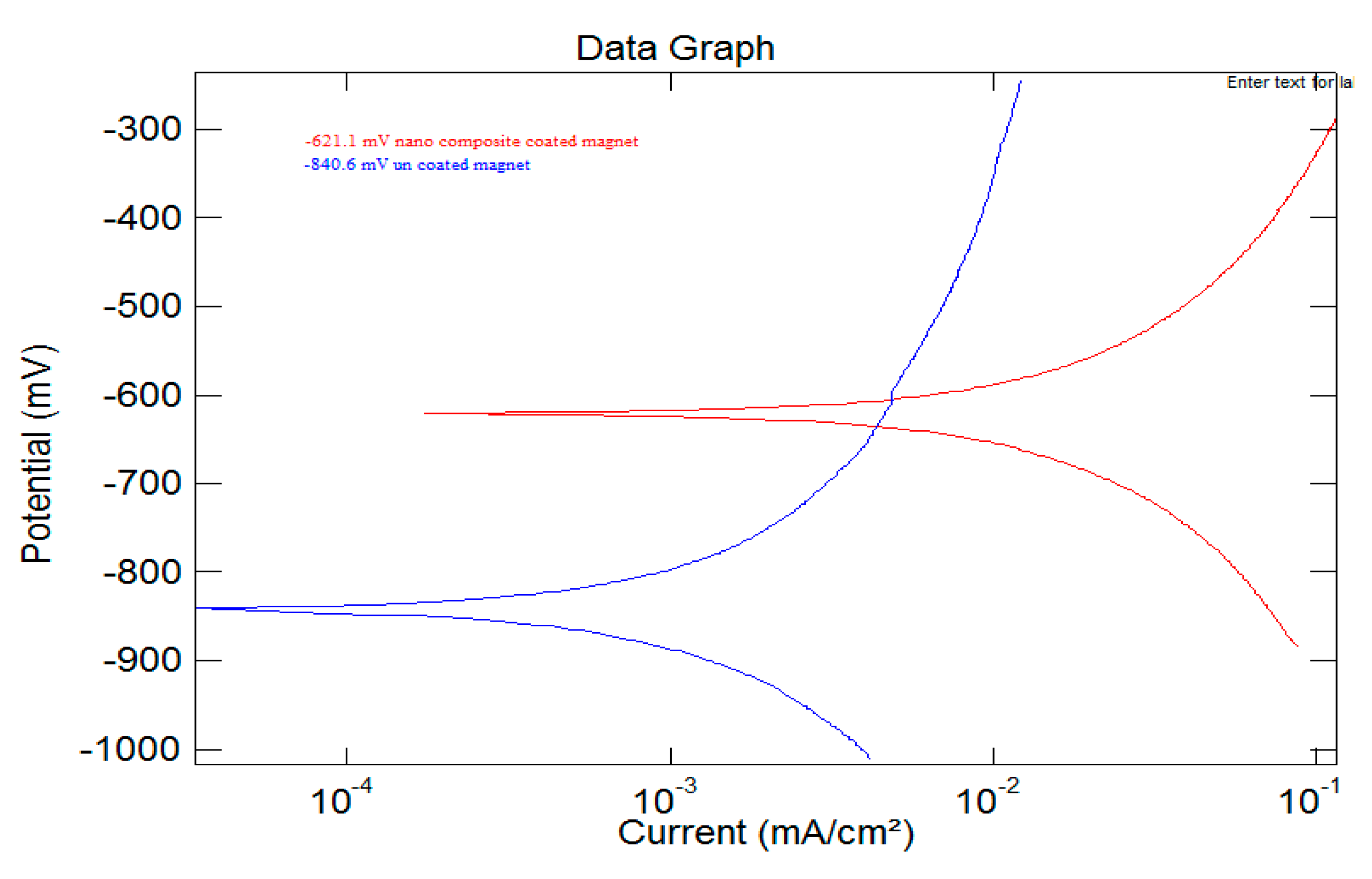
2.3. Corrosion Pattern
2.4. B-H Curve
3. Results and Discussion
4. Comparative Analysis of Vector Controlled IPMSM with and without NCPM
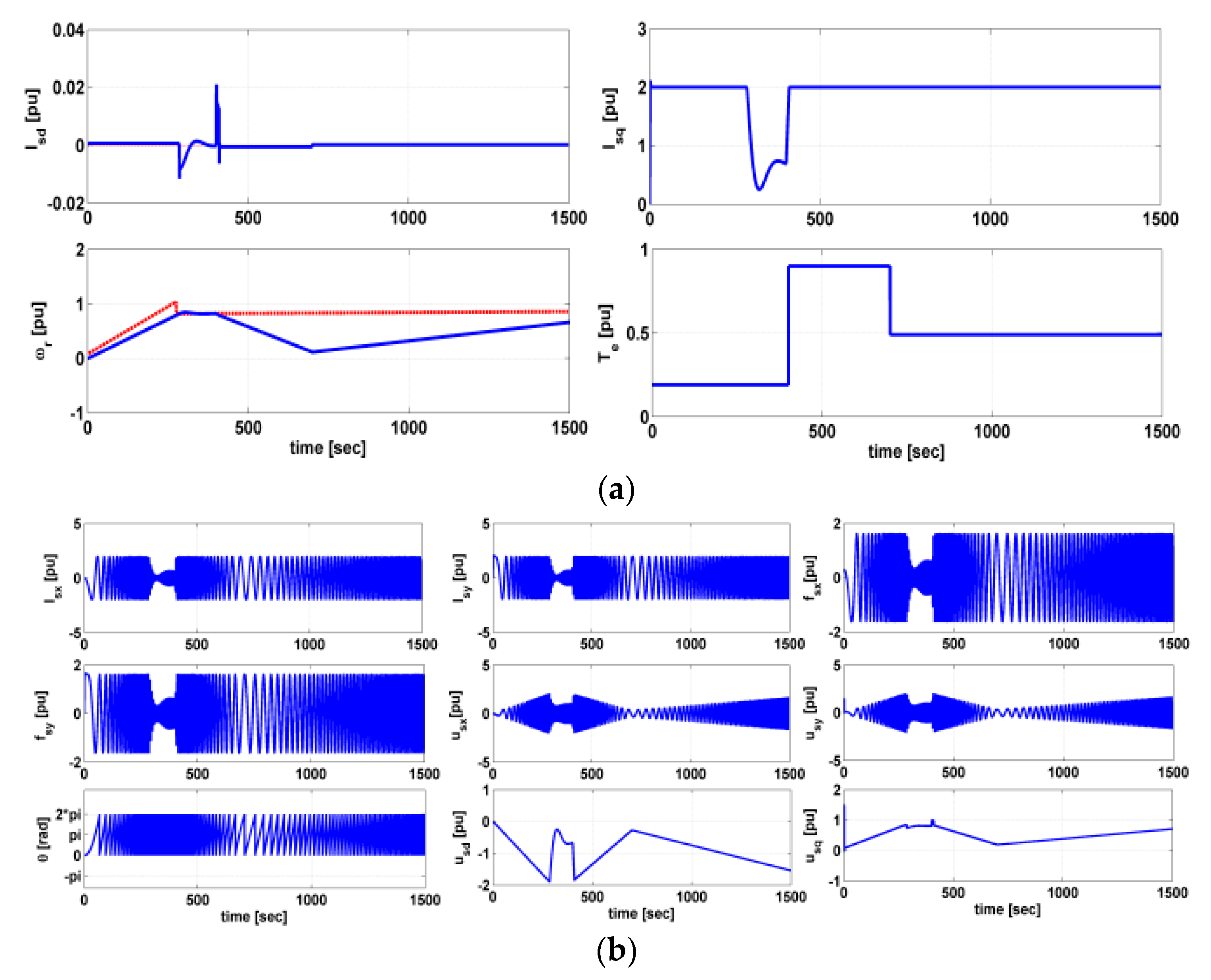
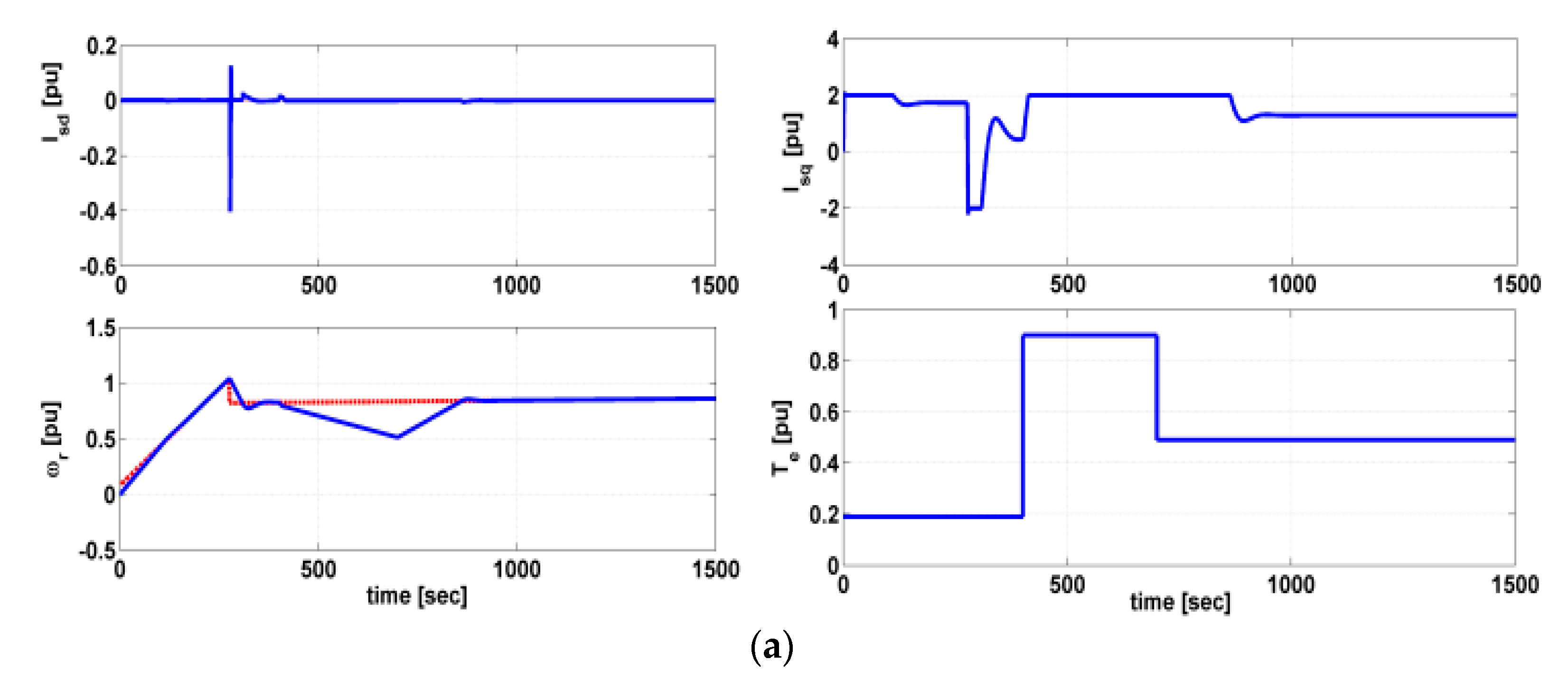
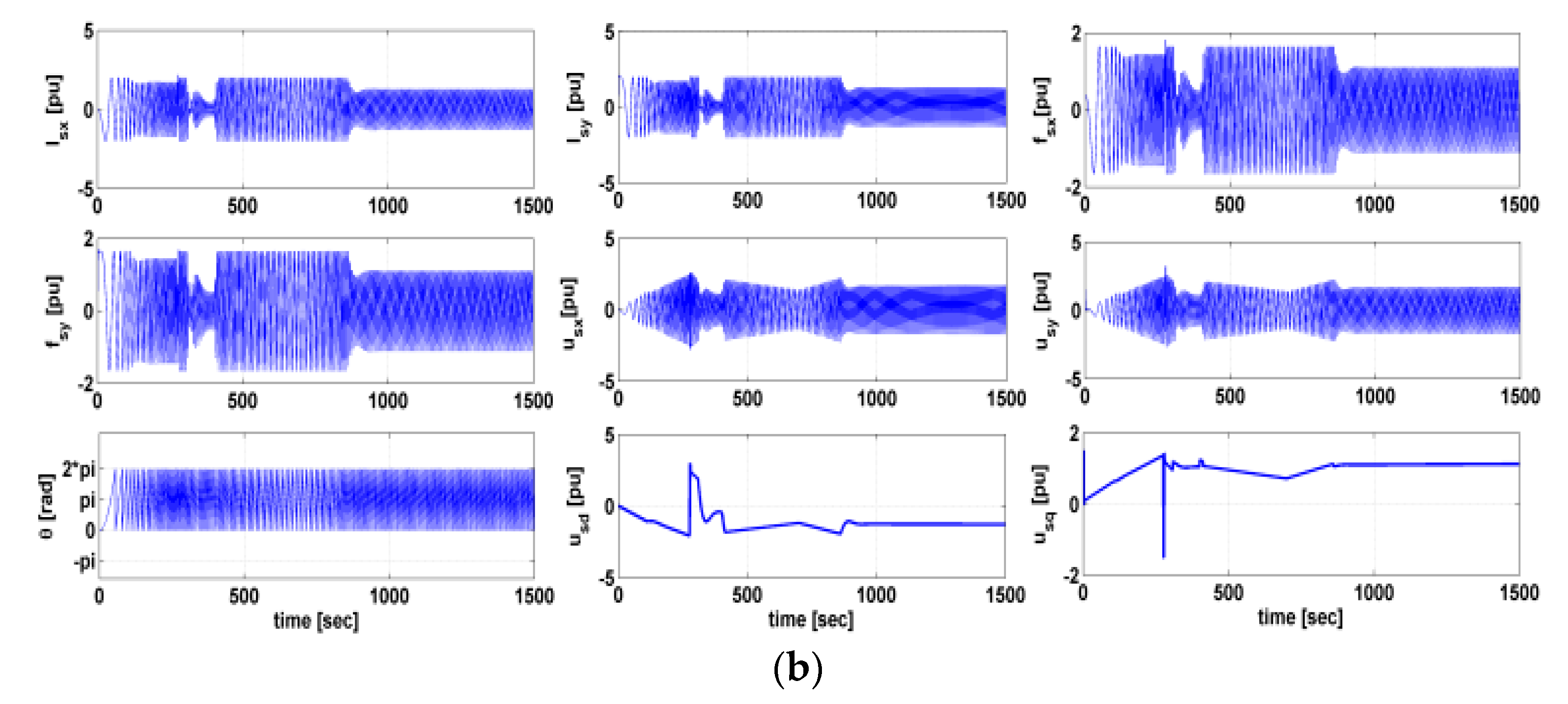
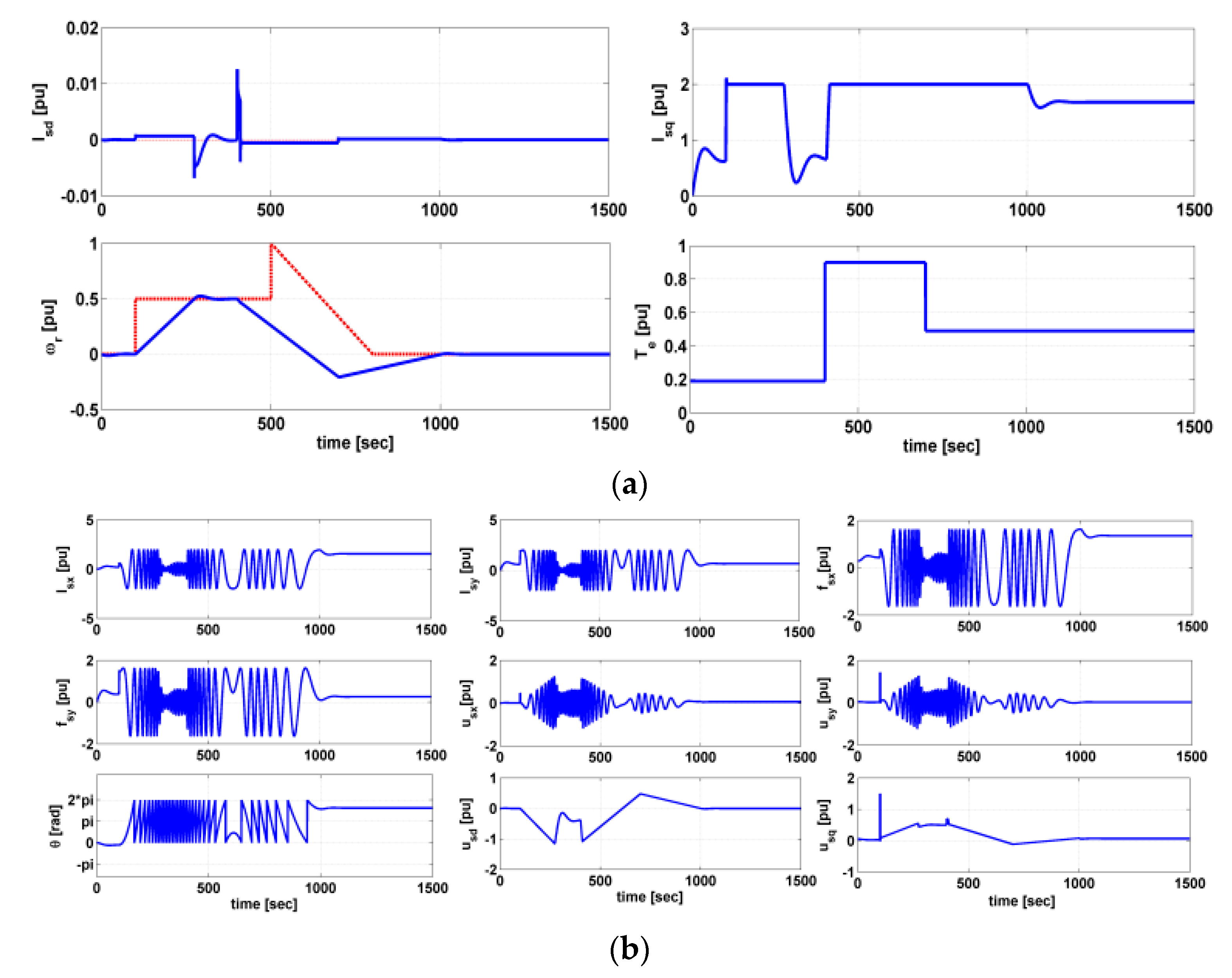
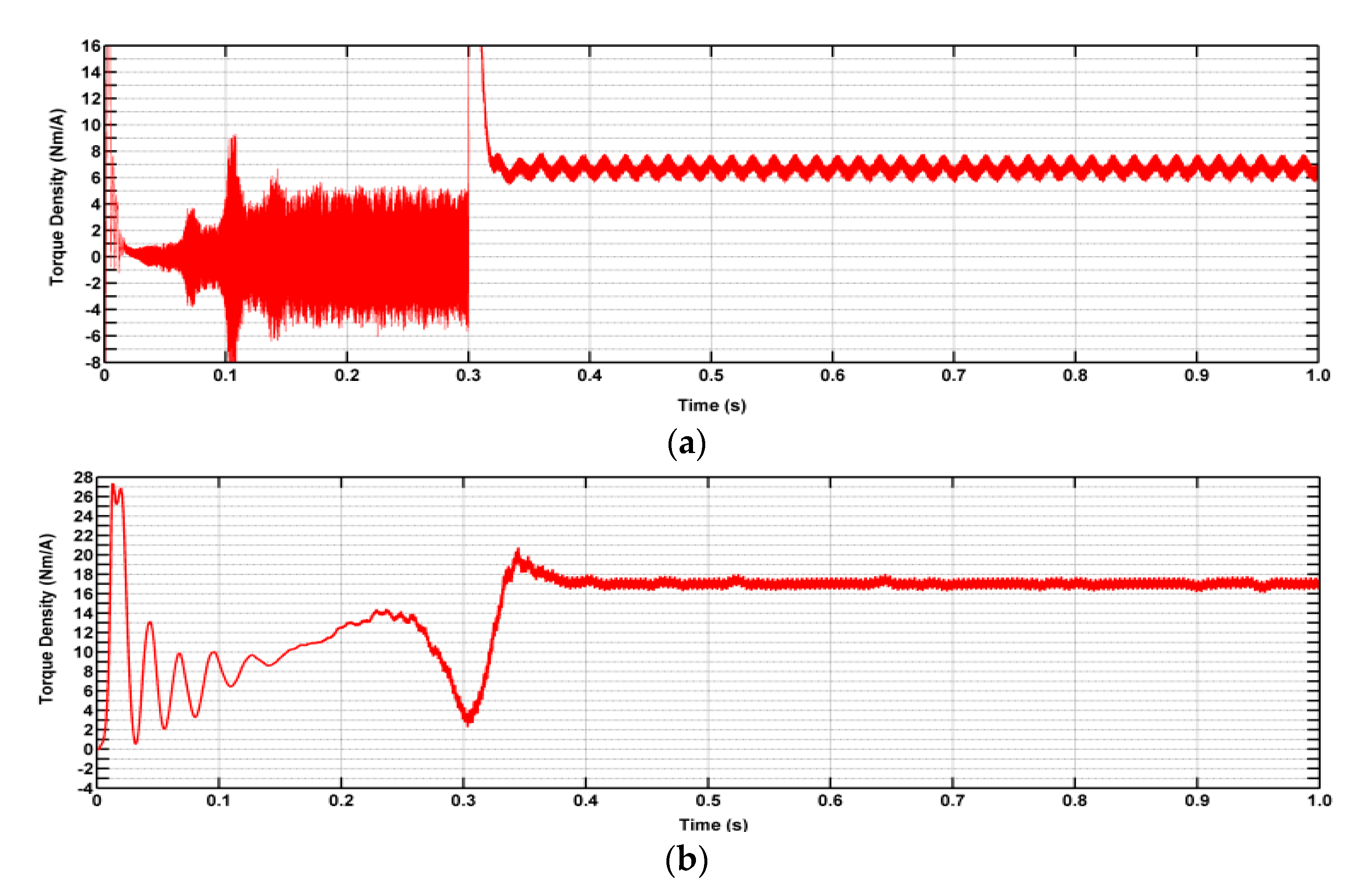
4.1. Fixed Load Condition
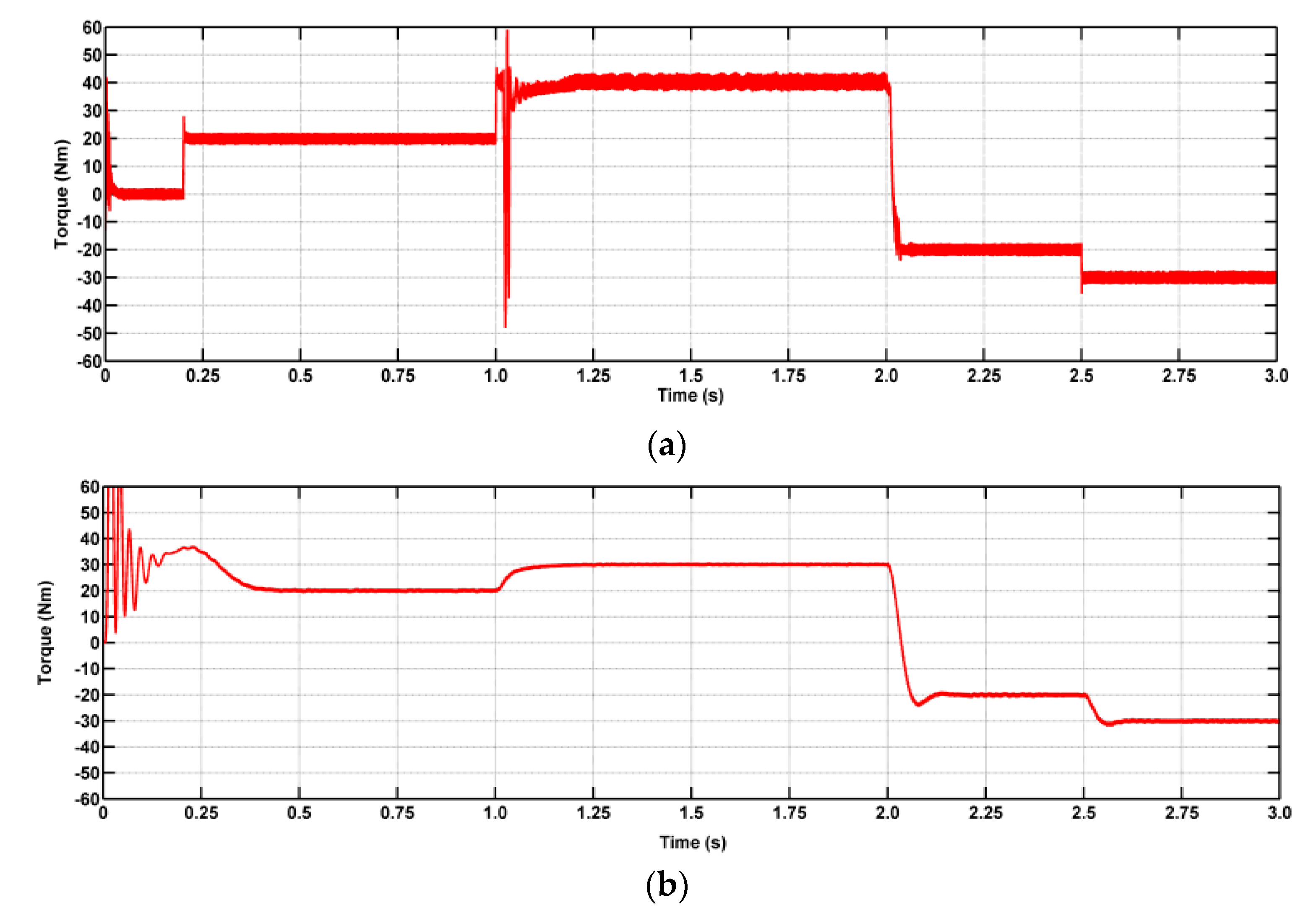
4.2. Variable Load Condition
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Anh, H.T.; Hsieh, M. Comparative study of PM-assisted SynRM and IPMSM on constant power speed range for EV applications. In Proceedings of the 2017 IEEE International Magnetics Conference (INTERMAG), Dublin, Ireland, 24–28 April 2017; p. 1. [Google Scholar]
- Zhang, Q.; Raherimihaja, H.J.; Xu, G.; Zhang, X. Design and Performance Analysis of Segmented Three-Phase IPMSM for EVs Integrated Battery Charger. IEEE Trans. Ind. Electron. 2021, 68, 9114–9124. [Google Scholar] [CrossRef]
- Mun, J.; Park, G.; Seo, S.; Kim, Y.; Jung, S. Design Characteristics of IPMSM With Wide Constant Power Speed Range for EV Traction. IEEE Trans. Magn. 2017, 53, 8105104. [Google Scholar] [CrossRef]
- Jung, Y.-H.; Park, M.-R.; Kim, K.-O.; Chin, J.-W.; Hong, J.-P.; Lim, M.-S. Design of High-Speed Multilayer IPMSM Using Ferrite PM for EV Traction Considering Mechanical and Electrical Characteristics. IEEE Trans. Ind. Appl. 2021, 57, 327–339. [Google Scholar] [CrossRef]
- Lim, M.-S.; Chai, S.-H.; Hong, J.-P. Design of sensorless controlled IPMSM with concentrated winding for EV drive at low speed. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–5. [Google Scholar]
- Hwang, Y.; Lee, J. HEV Motor Comparison of IPMSM With Nd Sintered Magnet and Heavy Rare-Earth Free Injection Magnet in the Same Size. IEEE Trans. Appl. Supercond. 2018, 28, 5206405. [Google Scholar] [CrossRef]
- Kim, W.H.; Kim, M.J.; Lee, K.D.; Lee, J.J.; Han, J.H.; Jeong, T.C.; Cho, S.Y.; Lee, J. NE-Map-Based Design of an IPMSM for Traction in an EV. IEEE Trans. Magn. 2014, 50, 4001404. [Google Scholar] [CrossRef]
- Jung, H.; Park, G.; Kim, D.; Jung, S. Optimal Design and Validation of IPMSM for Maximum Efficiency Distribution Compatible to Energy Consumption Areas of HD-EV. IEEE Trans. Magn. 2017, 53, 8201904. [Google Scholar] [CrossRef]
- Du, J.; Wang, X.; Lv, H. Optimization of Magnet Shape Based on Efficiency Map of IPMSM for EVs. IEEE Trans. Appl. Supercond. 2016, 26, 0609807. [Google Scholar] [CrossRef]
- Kurosu, R.; Sugawara, A.; Iwama, H.; Doi, M.; Shima, T. Improvement of Magnetic Properties in MicrofabricatedFePt and Fe Nano-Composites Upon Post-Annealing. IEEE Magn. Lett. 2017, 8, 5502804. [Google Scholar] [CrossRef]
- Venkatachalam, M.; Kannan, M.D.; Muthukumarasamy, N.; Prasanna, S.; Jayakumar, S.; Balasundaraprabhu, R.; Saroja, M. Investigations on electron beam evaporated Cu(In0.85Ga0.15)Se2 thin film solar cells. Sol. Energy 2009, 83, 1652–1655. [Google Scholar] [CrossRef]
- Yılmaz, K.; Karaagac, H. A hybrid solar cell based on silicon-nanowire and organic-thin film. Phys. Status Solidi 2014, 211, 2503–2508. [Google Scholar]
- Vellucci, F.; Pede, G. Fast-Charge Life Cycle Test on a Lithium-Ion Battery Module. World Electr. Veh. J. 2018, 9, 13. [Google Scholar] [CrossRef]
- Rupp, M.; Schulze, S.; Kuperjans, I. Comparative Life Cycle Analysis of Conventional and Hybrid Heavy-Duty Trucks. World Electr. Veh. J. 2018, 9, 33. [Google Scholar] [CrossRef]
- Akutagawa, K.; Wakao, Y. Stabilization of Vehicle Dynamics by Tire Digital Control—Tire Disturbance Control Algorithm for an Electric Motor Drive System. World Electr. Veh. J. 2019, 10, 25. [Google Scholar] [CrossRef]
- Zhong, Z.; You, J.; Zhou, S. Torque Ripple Reduction of DTC Based on an Analytical Model of PMSM. World Electr. Veh. J. 2020, 11, 28. [Google Scholar] [CrossRef]
- Baranov, G.; Zolotarev, A.; Ostrovskii, V.; Karimov, T.; Voznesensky, A. Analytical Model for the Design of Axial Flux Induction Motors with Maximum Torque Density. World Electr. Veh. J. 2021, 12, 24. [Google Scholar] [CrossRef]
- He, T.; Zhu, Z.; Eastham, F.; Wang, Y.; Bin, H.; Wu, D.; Gong, L.; Chen, J. Permanent Magnet Machines for High-Speed Applications. World Electr. Veh. J. 2022, 13, 18. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Ali, Q.; Lipo, T.A. A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electr. Veh. J. 2022, 13, 16. [Google Scholar] [CrossRef]
- He, X.; Bao, G. Suppression of Cross-Coupling Effect of Hybrid Permanent Magnet Synchronous Motor with Parallel Magnetic Circuit. World Electr. Veh. J. 2022, 13, 11. [Google Scholar] [CrossRef]
- Gundogdu, T.; Zhu, Z.-Q.; Chan, C.C. Comparative Study of Permanent Magnet, Conventional, and Advanced Induction Machines for Traction Applications. World Electr. Veh. J. 2022, 13, 137. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Souissi, A.; Abdennadher, I.; Masmoudi, A. On the Analysis and Torque Enhancement of Flux-Switching Permanent Magnet Machines in Electric Power Steering Systems. World Electr. Veh. J. 2022, 13, 64. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, Q.; Xiao, J.; Liang, T.; Lin, Z.; Chen, W. High-Frequency Square Wave Injection Sensorless Control Method of IPMSM Based on Oversampling Scheme. World Electr. Veh. J. 2022, 13, 217. [Google Scholar] [CrossRef]
- Graichen, H.-C.; Sauerhering, J.; Stamann, O.; Beyrau, F.; Boye, G. Influence of Adhesive Tapes as Thermal Interface Materials on the Thermal Load of a Compact Electrical Machine. World Electr. Veh. J. 2022, 13, 42. [Google Scholar] [CrossRef]
- Chen, W.; Wang, S.; Li, X.; Zhang, G. A Reference Voltage Self-Correction Method for Capacitor Voltage Offset Suppression of Three-Phase Four-Switch Inverter-Fed PMSM Drives. World Electr. Veh. J. 2022, 13, 24. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, Q.; Gao, Y.; Gao, D. Real-Time Fire Detection Method for Electric Vehicle Charging Stations Based on Machine Vision. World Electr. Veh. J. 2022, 13, 23. [Google Scholar] [CrossRef]
- Cui, Y.; Faizan, M.; Chen, Z. Back EMF Waveform Comparison and Analysis of Two Kinds of Electrical Machines. World Electr. Veh. J. 2021, 12, 149. [Google Scholar] [CrossRef]
- Chai, J.; Zhao, T.; Gui, X. Multi-Objective Optimization Design of Permanent Magnet Torque Motor. World Electr. Veh. J. 2021, 12, 131. [Google Scholar] [CrossRef]
- Kuptsov, V.; Fajri, P.; Trzynadlowski, A.; Zhang, G.; Magdaleno-Adame, S. Electromagnetic Analysis and Design Methodology for Permanent Magnet Motors Using MotorAnalysis-PM Software. Machines 2019, 7, 75. [Google Scholar] [CrossRef]
- Iftikhar, M.H.; Park, B.-G.; Kim, J.-W. Design and Analysis of a Five-Phase Permanent-Magnet Synchronous Motor for Fault-Tolerant Drive. Energies 2021, 14, 514. [Google Scholar] [CrossRef]
- Zou, N.; Yan, Y.; Shi, T.; Song, P. Wide Speed Range Operation Strategy of Indirect Matrix Converter–Surface Mounted Permanent Magnet Synchronous Motor Drive. Energies 2021, 14, 2277. [Google Scholar] [CrossRef]
- Chereji, E.; Radac, M.-B.; Szedlak-Stinean, A.-I. Sliding Mode Control Algorithms for Anti-Lock Braking Systems with Performance Comparisons. Algorithms 2021, 14, 2. [Google Scholar] [CrossRef]
- Yoon, K.-Y.; Baek, S.-W. Robust Design Optimization with Penalty Function for Electric Oil Pumps with BLDC Motors. Energies 2019, 12, 153. [Google Scholar] [CrossRef]
- He, B.; Javvaji, B.; Zhuang, X. Characterizing Flexoelectricity in Composite Material Using the Element-Free Galerkin Method. Energies 2019, 12, 271. [Google Scholar] [CrossRef]
- Yin, W.; Alekseeva, M.V.; Venderbosch, R.H.; Yakovlev, V.A.; Heeres, H.J. Catalytic Hydrotreatment of the Pyrolytic Sugar and Pyrolytic Lignin Fractions of Fast Pyrolysis Liquids Using Nickel Based Catalysts. Energies 2020, 13, 285. [Google Scholar] [CrossRef]
- Xue, X.; Cheng, M.; Hou, T.; Wang, G.; Peng, N.; Liang, R. Accurate Location of Faults in Transmission Lines by Compensating for the Electrical Distance. Energies 2020, 13, 767. [Google Scholar] [CrossRef]
- Zhou, J.; Li, D.; Fan, X.; Zhang, Z.; Zhu, J.; Hu, C.; Tang, D. Investigations on heat flow management perspective-induced design criteria of thermal interface materials. J. Mater. Res. Technol. 2023, 25. [Google Scholar] [CrossRef]
- Hanini, W.; Mahfoudhi, S.; Ayadi, M. Development of Electrothermal Models for Electrical Traction. World Electr. Veh. J. 2022, 13, 39. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, Z.; Pride, A.; Shi, J.; Deodhar, R.; Umemura, C. Comparison of Different Winding Configurations for Dual Three-Phase Interior PM Machines in Electric Vehicles. World Electr. Veh. J. 2022, 13, 51. [Google Scholar] [CrossRef]
- El Hadraoui, H.; Zegrari, M.; Chebak, A.; Laayati, O.; Guennouni, N. A Multi-Criteria Analysis and Trends of Electric Motors for Electric Vehicles. World Electr. Veh. J. 2022, 13, 65. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Parameters | Coated Magnets | Uncoated Magnets |
|---|---|---|---|
| 1 | Br (kG) | 14.11 | 13.73 |
| 2 | Hc (kOe) | 13.9 | 13.48 |
| 3 | Hci (kOe) | >20 | 17.88 |
| 4 | BH max (MGOe) | 51.49 | 48.39 |
| 5 | H0 (kOe) | −7.173 | −7.06 |
| 6 | Hk (kOe) | −18.80 | −18.29 |
| 7 | Hmax (kOe) | 23.40 | 23.7 |
| 8 | Bmax (kG) | 25.62 | 25.52 |
| 9 | Surface flux density (kG) | 4.1 | 3.9 |
| Parameter | Value |
|---|---|
| Voltage, Vs | 400 V |
| Current, I | 40 A |
| Torque, τ | 60 Nm |
| Rated Power | 14 KW |
| Series resistance, Rs | 0.0401 Ω |
| d-axis inductance, Ld | 0.3566 H |
| q-axis inductance, Lq | 1.1599 H |
| Rated Speed, N | 1500 rpm |
| Load inertia, J | 0.0074 kg/m2 |
| Permanent Magnet flux linkage, | 0.9487 wb |
| Stator zero sequence inductance, L0 | 0.5 * (Ld + Lq) H |
| Stator Negative sequence inductance, L2 | 0.5 * (Ld − Lq) H |
| speed loop parameters | |
| Kp | 30 |
| Ki | 2 |
| q-loop parameters | |
| Kp | 10 |
| Ki | 10 |
| d-loop parameters | |
| Kp | 1 |
| Ki | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jonnalagadda, V.K.; Tammminana, N.; Guntu, R.R.; Salkuti, S.R. Performance Analysis of Conventional IPMSM and NCPM Based IPMSM. Clean Technol. 2023, 5, 1140-1158. https://doi.org/10.3390/cleantechnol5030057
Jonnalagadda VK, Tammminana N, Guntu RR, Salkuti SR. Performance Analysis of Conventional IPMSM and NCPM Based IPMSM. Clean Technologies. 2023; 5(3):1140-1158. https://doi.org/10.3390/cleantechnol5030057
Chicago/Turabian StyleJonnalagadda, Vijaya Kumar, Narasimhulu Tammminana, Raja Rao Guntu, and Surender Reddy Salkuti. 2023. "Performance Analysis of Conventional IPMSM and NCPM Based IPMSM" Clean Technologies 5, no. 3: 1140-1158. https://doi.org/10.3390/cleantechnol5030057
APA StyleJonnalagadda, V. K., Tammminana, N., Guntu, R. R., & Salkuti, S. R. (2023). Performance Analysis of Conventional IPMSM and NCPM Based IPMSM. Clean Technologies, 5(3), 1140-1158. https://doi.org/10.3390/cleantechnol5030057