
Empirical Evaluation and Simulation of GNSS Solutions on UAS-SfM Accuracy for Shoreline Mapping

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Study Purpose and Objectives
- Evaluation of PPK and brief experimentation with RTN and PPP GNSS trajectory solutions as alternatives to GCPs for the direct georeferencing of UAS-SfM image locations and derived mapping products;
- Assessment of UAS-SfM data product vertical accuracy as a result of PPK GNSS sample rate, fix percentage, and baseline distance;
- Comparison of UAS-SfM-derived products against ground control data acquired using other surveying techniques (i.e., RTN GNSS, total station, and geodetic-grade terrestrial light detection and ranging (lidar));
- Application of Monte Carlo simulation techniques to examine the impact of GNSS quality on the vertical accuracy of UAS-SfM-derived point clouds.
3. Study Sites
4. Methodology
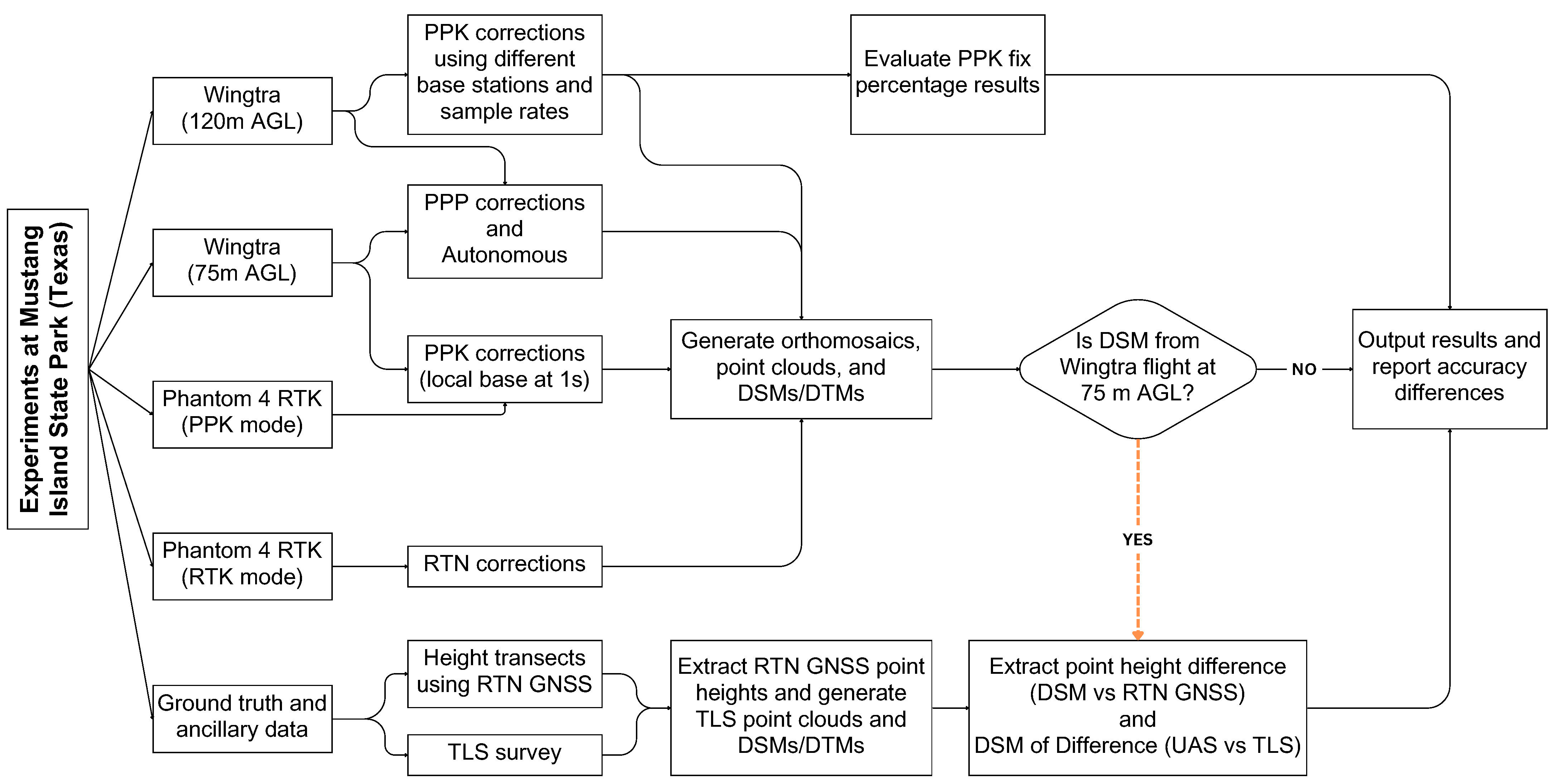
4.1. Mustang Island State Park Field Experiment
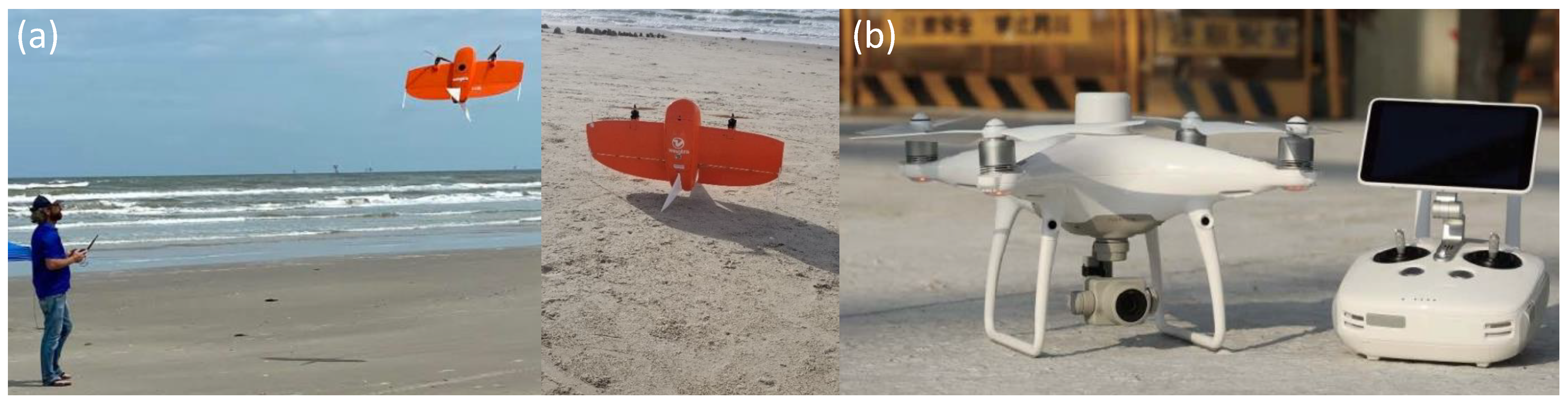
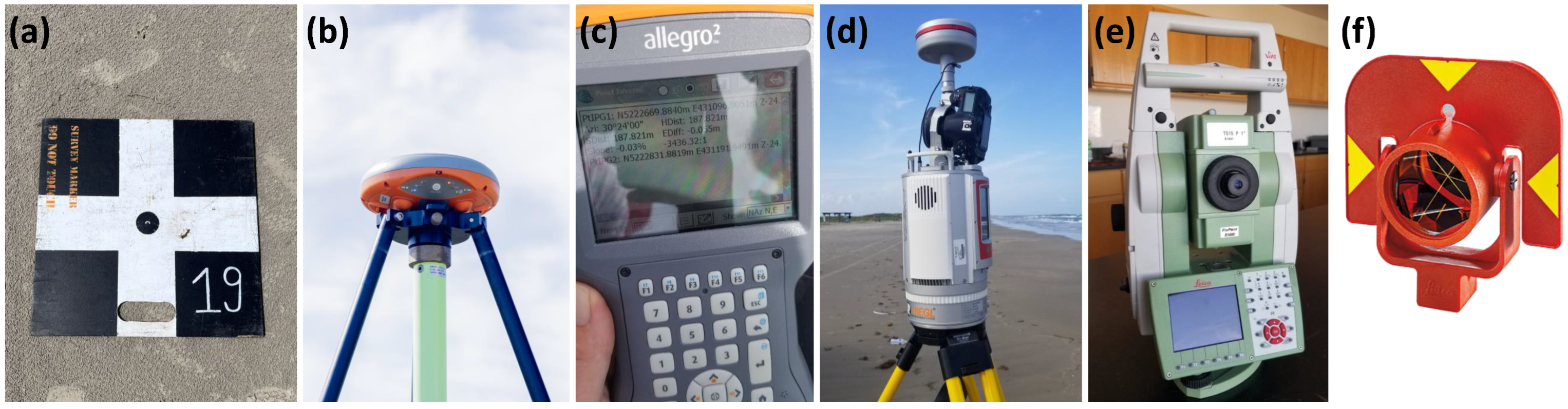
4.1.1. Hardware
4.1.2. Software
4.1.3. UAS Flight Designs
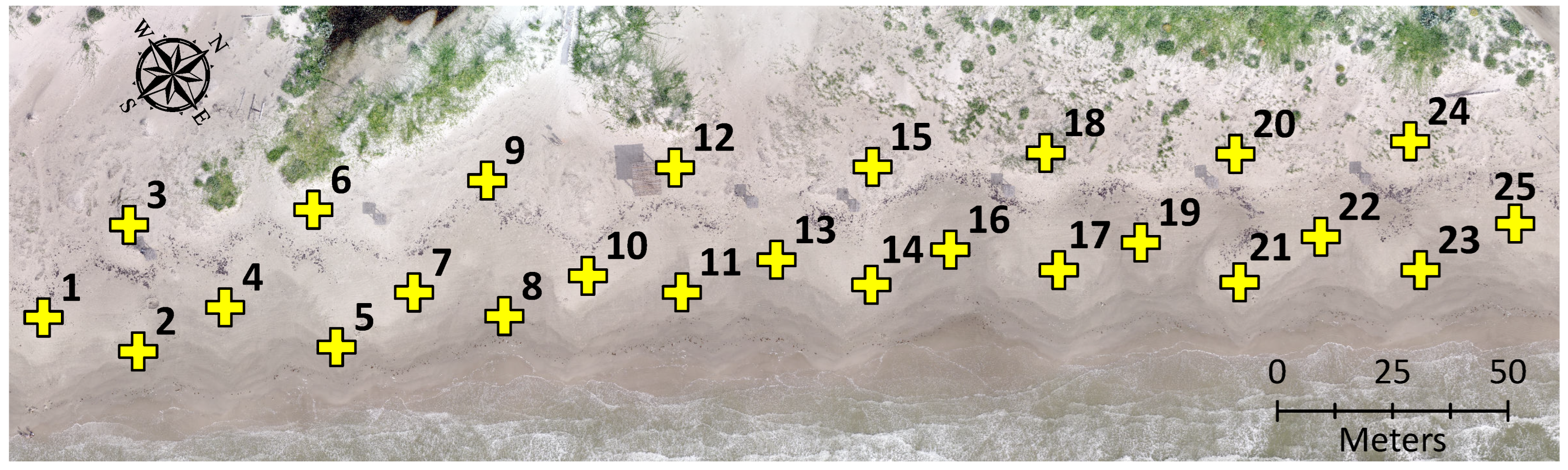
4.1.4. Ground Truth
4.1.5. Data Processing and GNSS Evaluation
- Test 1: UAS-SfM vertical accuracy assessment when using RTN GNSS to correct the location of Phantom 4 imagery (flown in RTK mode).
- Test 2: Examination of UAS-SfM vertical accuracies when using PPK GNSS to correct the location of images from the Phantom 4 (flown in PPK mode) and the two Wingtra flights (i.e., 75 m AGL and 120 m AGL).
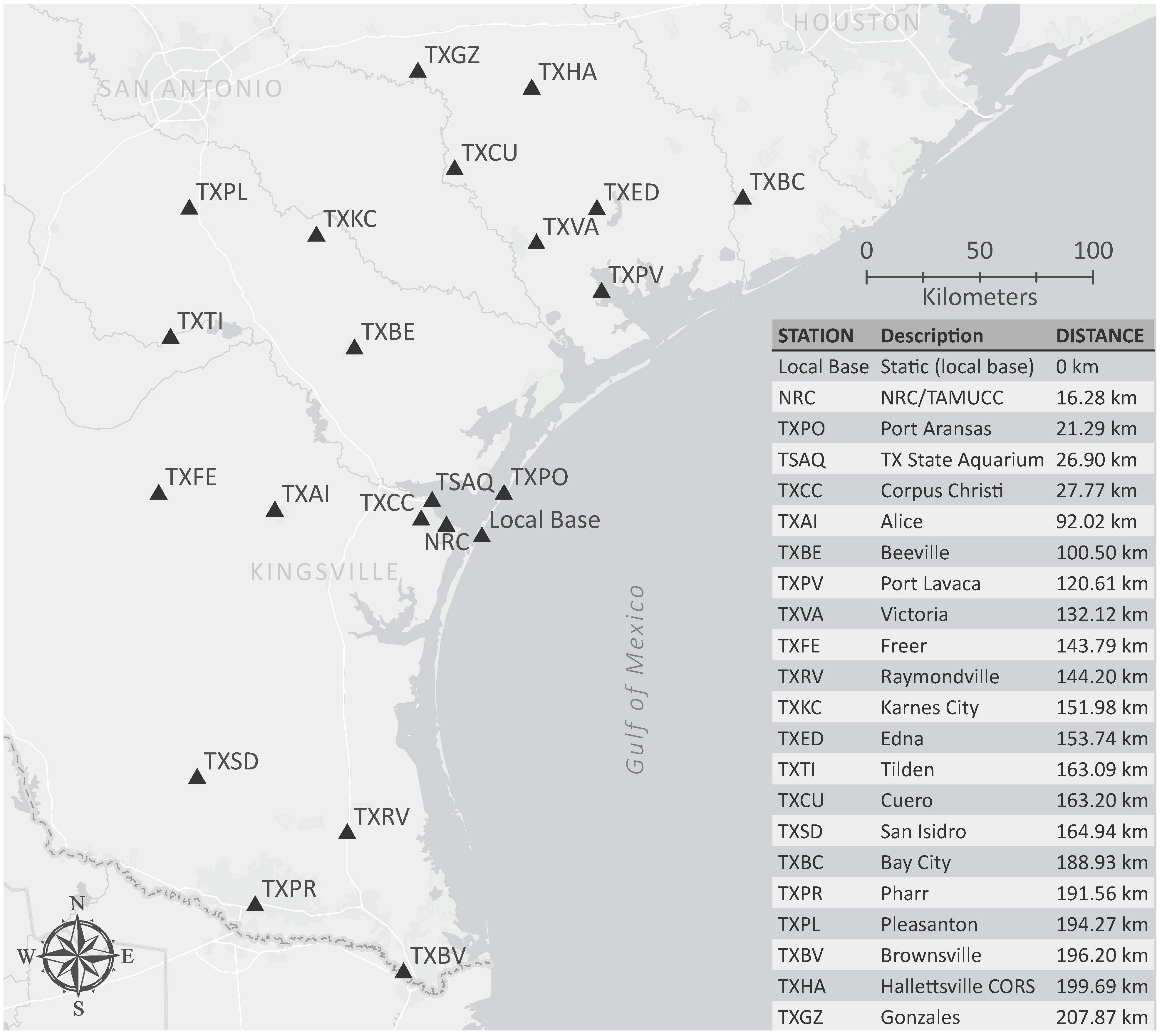
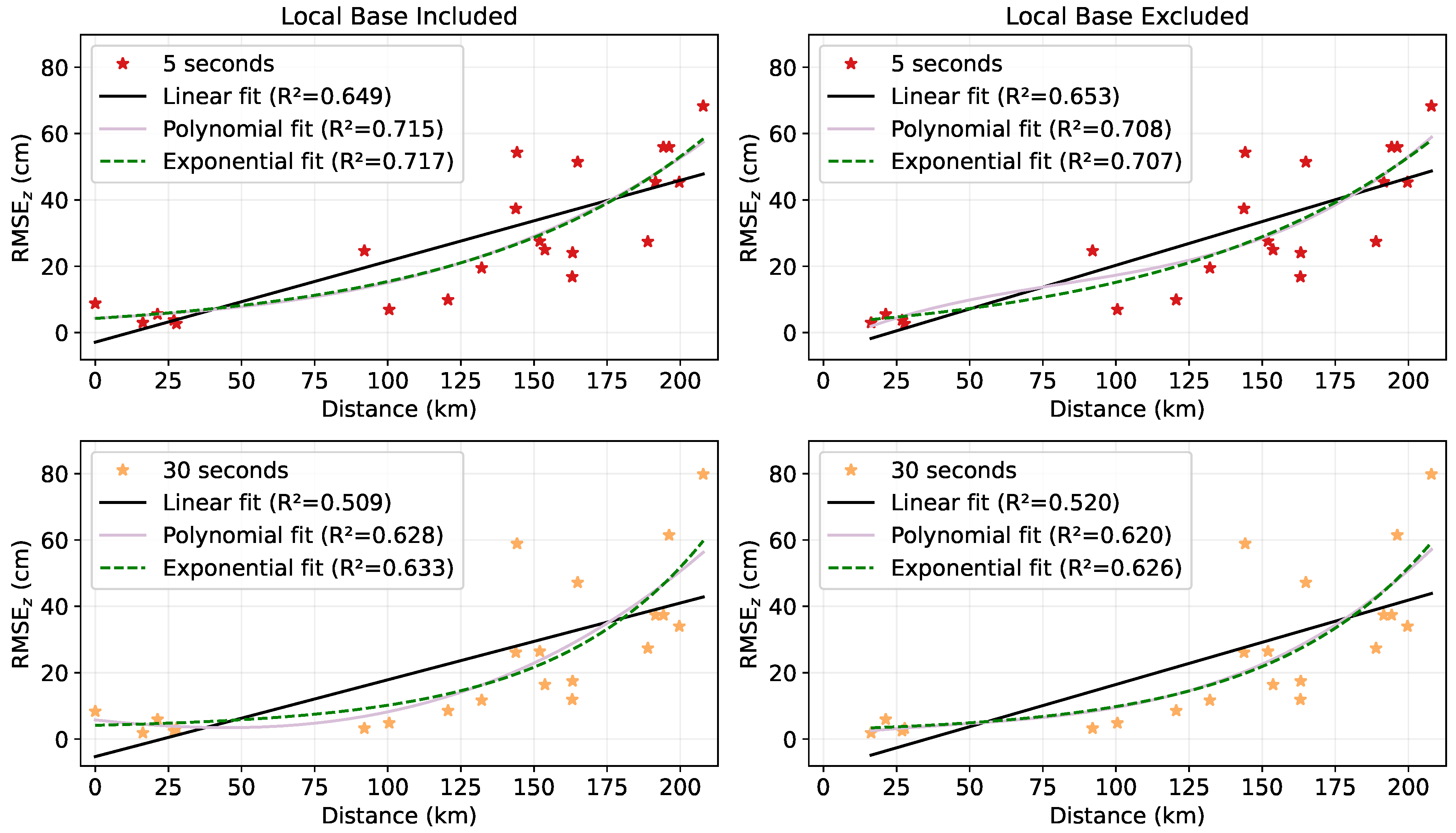
- Test 2.1: Influence of PPK base station distance on UAS-SfM vertical accuracy, using imagery from the Wingtra at 120 m AGL.
- Test 2.2: Effects of different GNSS sample rates on PPK corrections (i.e., 1 s, 5 s, 15 s, and 30 s), using imagery from the Wingtra at 120 m AGL.
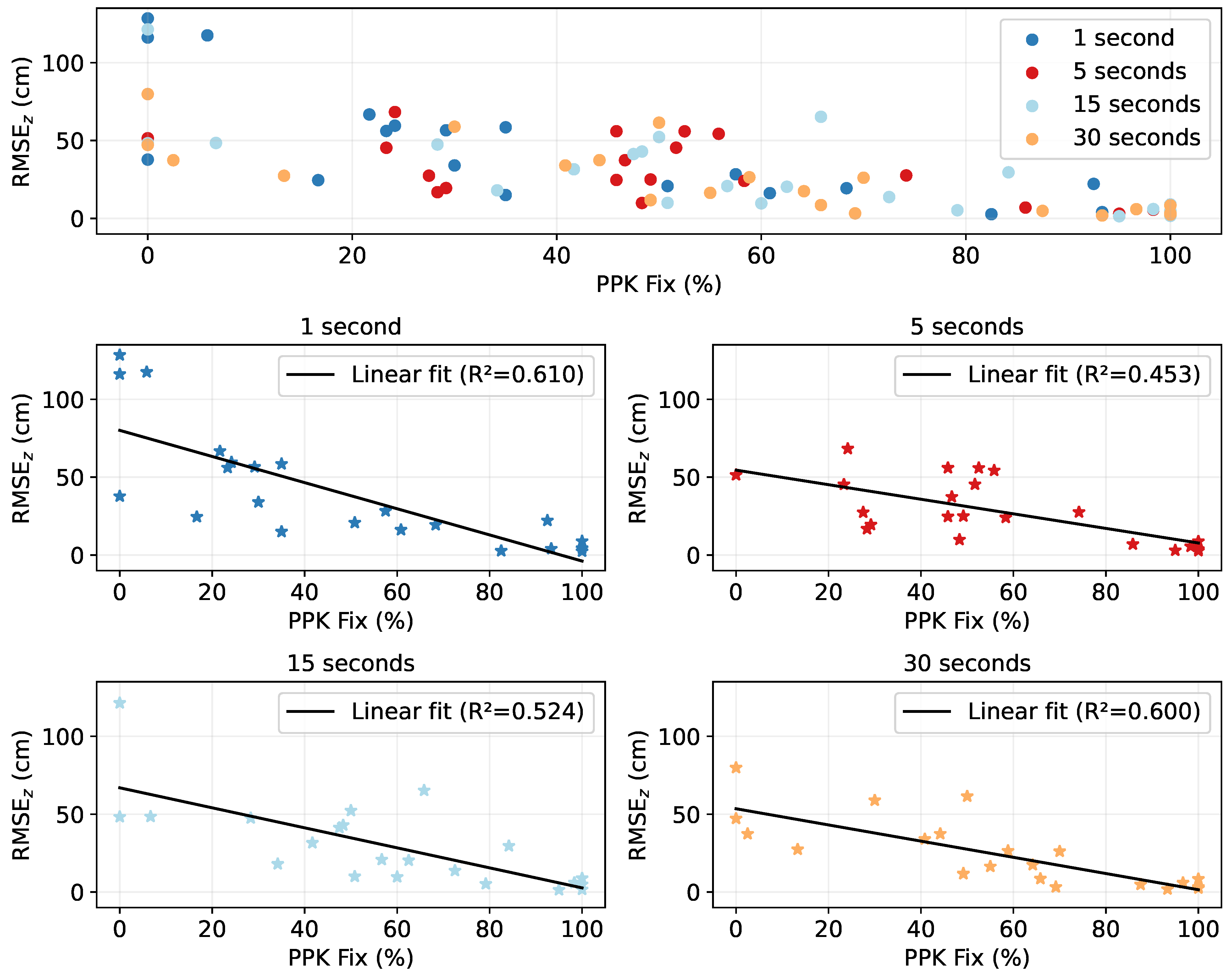
- Test 2.3: Influence of the PPK fix percentage on the accuracy of UAS-SfM mapping products, using imagery from the Wingtra at 120 m AGL.
- Test 3: Assessment of UAS-SfM vertical accuracies when using PPP GNSS to correct image geotags, using imagery from the two Wingtra flights.
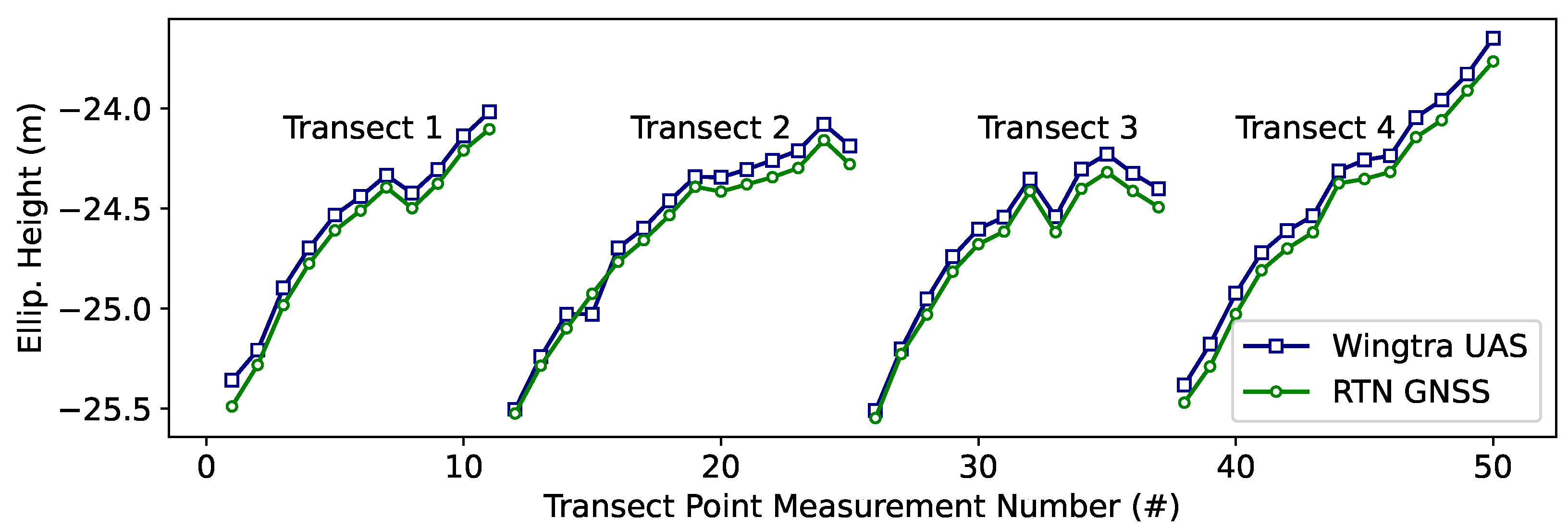
- Test 4: Comparison between UAS-SfM-derived DSMs (using the Wingtra-generated DSM at 75 m AGL) and point heights extracted from cross-shore transects measured using RTN GNSS.
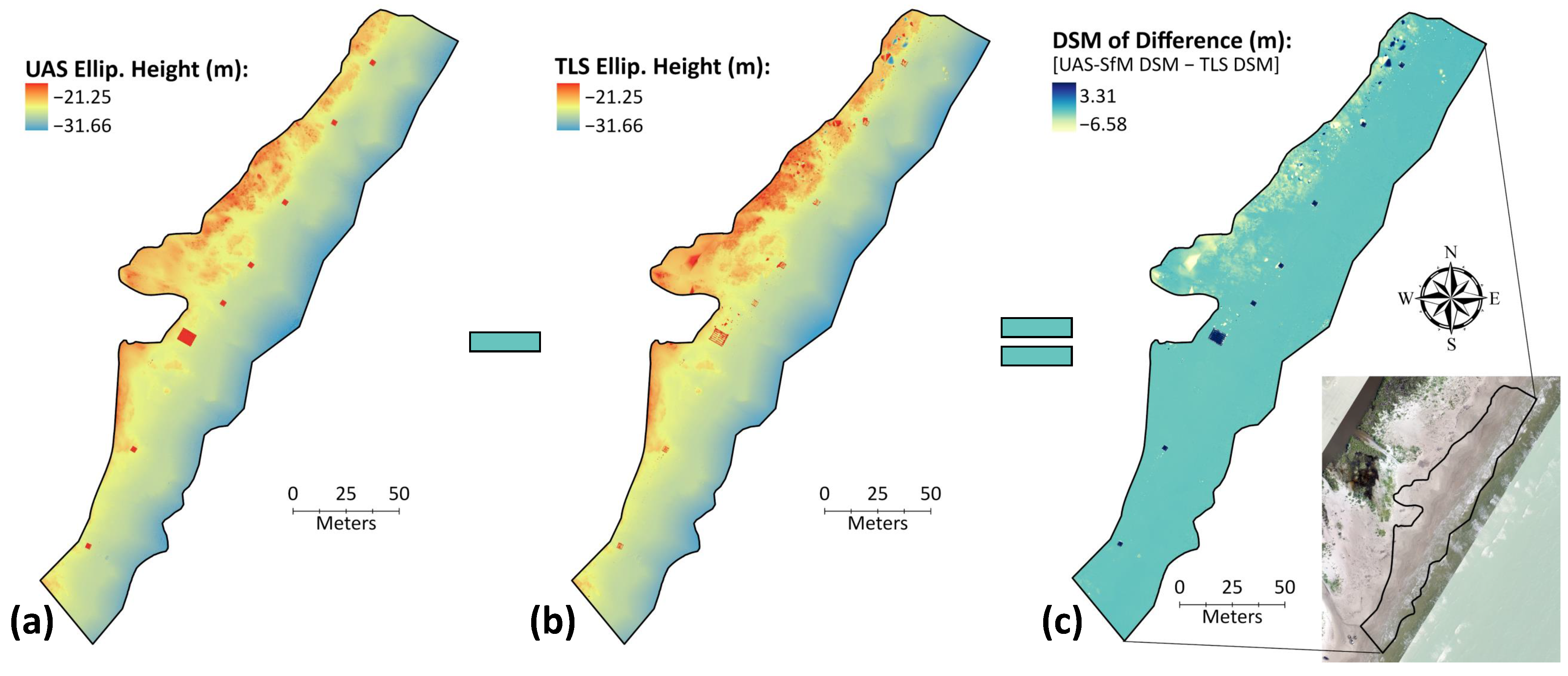
- Test 5: Comparison between DSMs generated using UAS-SfM (i.e., Wingtra at 75 m AGL) versus DSMs generated using the geodetic-grade Reigl VZ-2000i TLS.
- Test 6: Supplementary processing of Wingtra data without additional corrections of image geotags for comparison against RTN, PPK, and PPP GNSS.
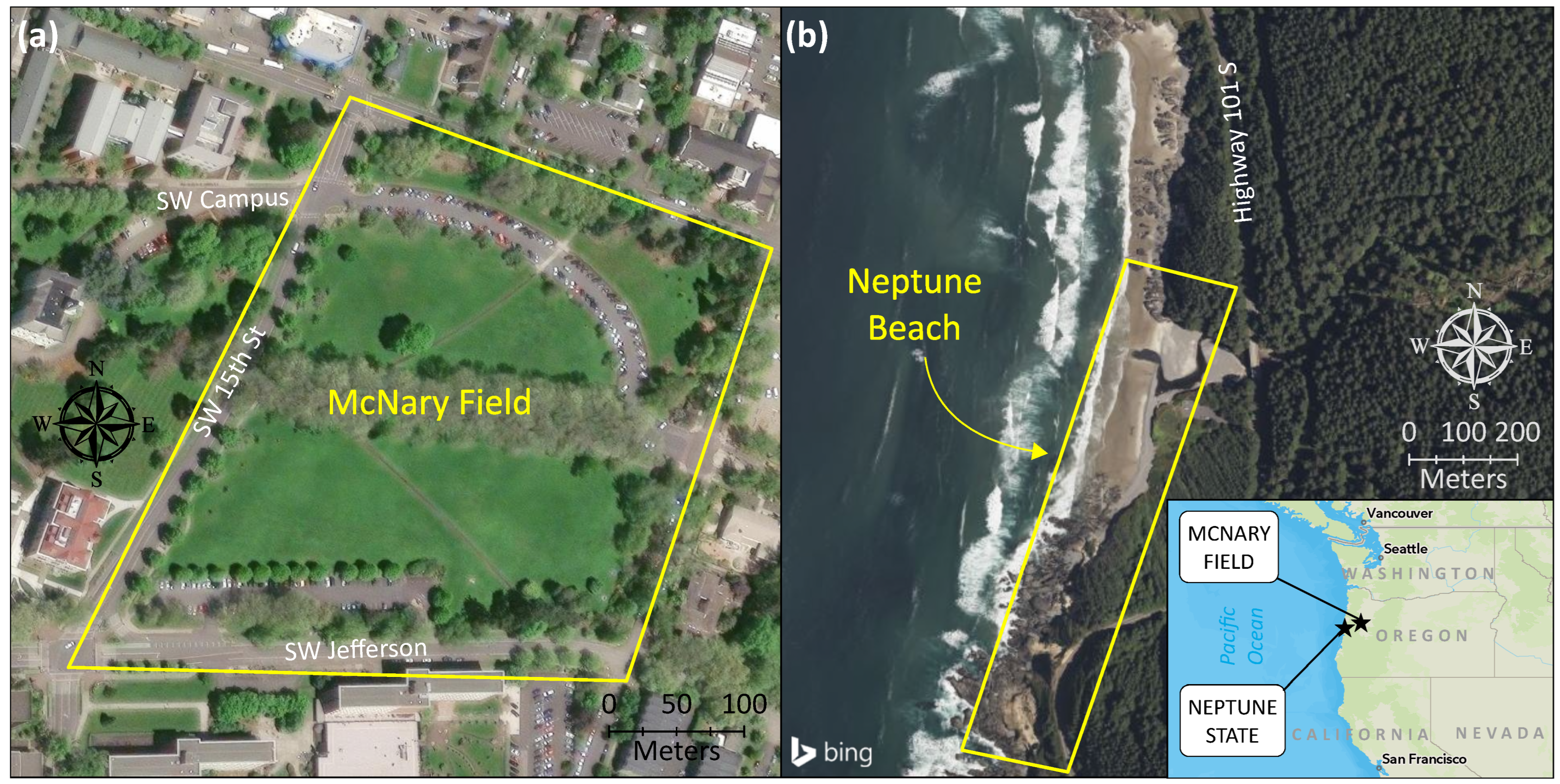
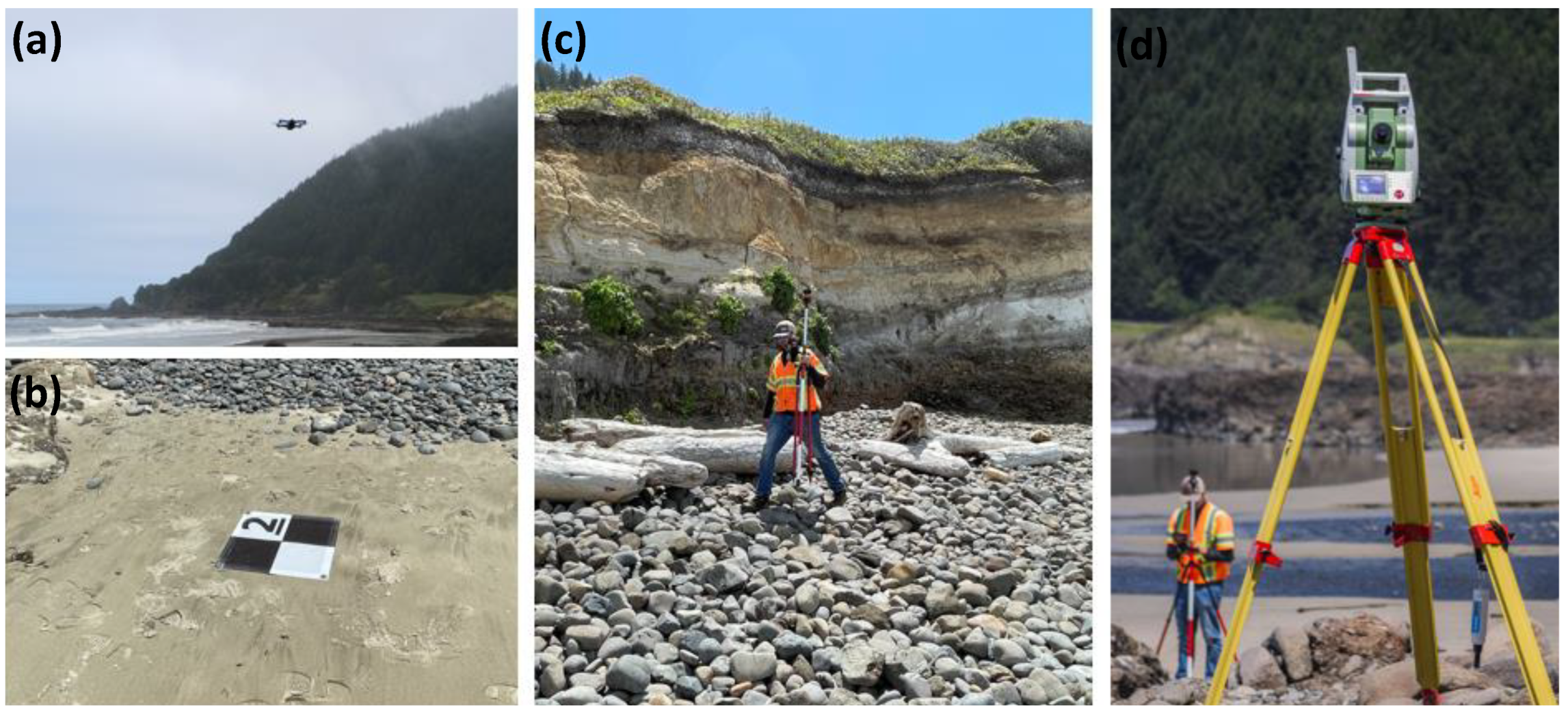
4.2. McNary Field and Neptune State Scenic Area Field Experiments
4.2.1. Hardware
4.2.2. Software
4.2.3. UAS Flight Designs
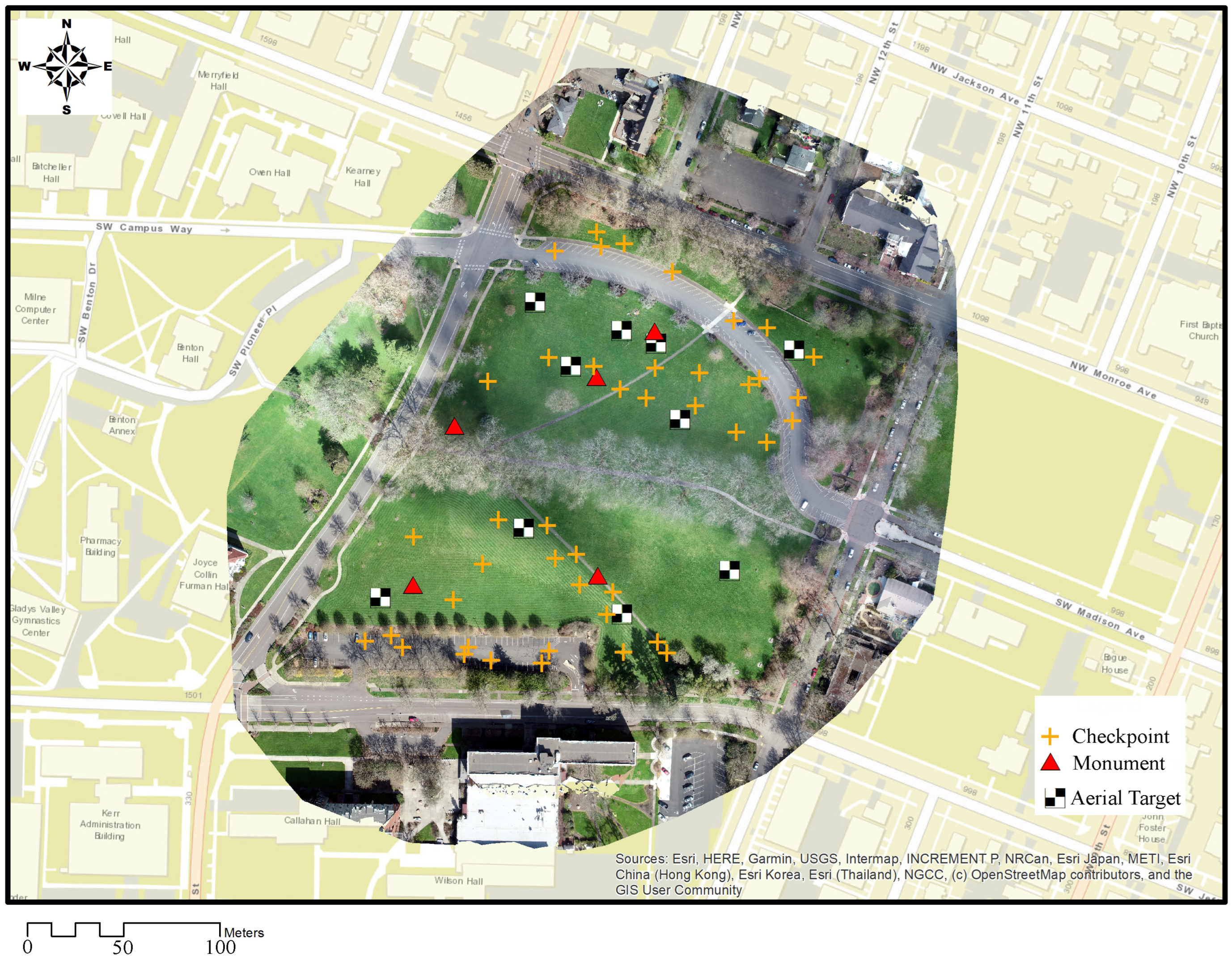
4.2.4. Ground Truth
4.2.5. Data Processing and GNSS Analyses
4.3. Simulated Tests (simUAS)
4.4. Accuracy Evaluation and SfM Processing
5. Results
5.1. GNSS Evaluation Results—Mustang Island State Park
5.2. GNSS Evaluation Results—McNary Field and Neptune State Scenic Area Field Experiments
5.3. Simulation Results (simUAS)—Monte Carlo
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, F3. [Google Scholar] [CrossRef]
- Javadnejad, F.; Slocum, R.K.; Gillins, D.T.; Olsen, M.J.; Parrish, C.E. Dense point cloud quality factor as proxy for accuracy assessment of image-based 3D reconstruction. J. Surv. Eng. 2021, 147, 04020021. [Google Scholar] [CrossRef]
- Casella, E.; Lewin, P.; Ghilardi, M.; Rovere, A.; Bejarano, S. Assessing the relative accuracy of coral heights reconstructed from drones and structure from motion photogrammetry on coral reefs. Coral Reefs 2022, 41, 869–875. [Google Scholar] [CrossRef]
- Śledziowski, J.; Terefenko, P.; Giza, A.; Forczmański, P.; Łysko, A.; Maćków, W.; Stępień, G.; Tomczak, A.; Kurylczyk, A. Application of unmanned aerial vehicles and image processing techniques in monitoring underwater coastal protection measures. Remote Sens. 2022, 14, 458. [Google Scholar] [CrossRef]
- Pashaei, M.; Kamangir, H.; Starek, M.J.; Tissot, P. Review and evaluation of deep learning architectures for efficient land cover mapping with UAS hyper-spatial imagery: A case study over a wetland. Remote Sens. 2020, 12, 959. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Albeaino, G.; Kelly, C.R.; Lassiter, H.A.; Wilkinson, B.; Gheisari, M.; Issa, R.R. Quantitative and qualitative assessments of geometric feature accuracy using a UAS-Lidar system for building surveying applications. J. Archit. Eng. 2023, 29, 04022046. [Google Scholar] [CrossRef]
- Ballouch, Z.; Hajji, R.; Poux, F.; Kharroubi, A.; Billen, R. A prior level fusion approach for the semantic segmentation of 3D point clouds using deep learning. Remote Sens. 2022, 14, 3415. [Google Scholar] [CrossRef]
- Williams, A.T.; Rangel-Buitrago, N.; Pranzini, E.; Anfuso, G. The management of coastal erosion. Ocean. Coast. Manag. 2018, 156, 4–20. [Google Scholar] [CrossRef]
- López, L.; Cellone, F. SfM-MVS and GIS analysis of shoreline changes in a coastal wetland, Parque Costero del Sur Biosphere Reserve, Argentina. Geocarto Int. 2022, 37, 11134–11150. [Google Scholar] [CrossRef]
- Casella, E.; Rovere, A.; Pedroncini, A.; Stark, C.P.; Casella, M.; Ferrari, M.; Firpo, M. Drones as tools for monitoring beach topography changes in the Ligurian Sea (NW Mediterranean). Geo-Mar. Lett. 2016, 36, 151–163. [Google Scholar] [CrossRef]
- Hwang, B.H.; Do, K.D.; Chang, S.Y. Morphological response of Storm Hinnamnor at Songjeong Beach using UAV-derived data. J. Coast. Res. 2024, 116, 126–130. [Google Scholar] [CrossRef]
- Sturdivant, E.J.; Lentz, E.E.; Thieler, E.R.; Farris, A.S.; Weber, K.M.; Remsen, D.P.; Miner, S.; Henderson, R.E. UAS-SfM for coastal research: Geomorphic feature extraction and land cover classification from high-resolution elevation and optical imagery. Remote Sens. 2017, 9, 1020. [Google Scholar] [CrossRef]
- Gonçalves, J.A.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Shin, B.S.; Kim, K.H. Dynamic observation for terrain volume estimation using UAV-based photogrammetry. J. Coast. Res. 2024, 116, 658–662. [Google Scholar] [CrossRef]
- Klemas, V.V. Coastal and environmental remote sensing from unmanned aerial vehicles: An overview. J. Coast. Res. 2015, 31, 1260–1267. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Jakovljevic, G.; Govedarica, M.; Alvarez-Taboada, F.; Pajic, V. Accuracy assessment of deep learning based classification of LiDAR and UAV points clouds for DTM creation and flood risk mapping. Geosciences 2019, 9, 323. [Google Scholar] [CrossRef]
- Carrera-Hernández, J.; Levresse, G.; Lacan, P. Is UAV-SfM surveying ready to replace traditional surveying techniques? Int. J. Remote Sens. 2020, 41, 4820–4837. [Google Scholar] [CrossRef]
- Rogers, S.R.; Manning, I.; Livingstone, W. Comparing the spatial accuracy of digital surface models from four unoccupied aerial systems: Photogrammetry versus LiDAR. Remote Sens. 2020, 12, 2806. [Google Scholar] [CrossRef]
- Fraser, C.S. Automatic camera calibration in close range photogrammetry. Photogramm. Eng. Remote Sens. 2013, 79, 381–388. [Google Scholar] [CrossRef]
- Ajayi, O.G.; Salubi, A.A.; Angbas, A.F.; Odigure, M.G. Generation of accurate digital elevation models from UAV acquired low percentage overlapping images. Int. J. Remote Sens. 2017, 38, 3113–3134. [Google Scholar] [CrossRef]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop height monitoring with digital imagery from unmanned aerial system (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.H.; Rodríguez-Pérez, J.R.; Ordóñez, C. Accuracy of unmanned aerial vehicle (UAV) and SfM photogrammetry survey as a function of the number and location of ground control points used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef]
- Thomas, O.; Stallings, C.; Wilkinson, B. Unmanned aerial vehicles can accurately, reliably, and economically compete with terrestrial mapping methods. J. Unmanned Veh. Syst. 2019, 8, 57–74. [Google Scholar] [CrossRef]
- Mugnai, F.; Tucci, G. A comparative analysis of unmanned aircraft systems in low altitude photogrammetric surveys. Remote Sens. 2022, 14, 726. [Google Scholar] [CrossRef]
- Ye, S.; Yan, F.; Zhang, Q.; Shen, D. Comparing the accuracies of sUAV-SFM and UAV-LiDAR point clouds for topographic measurements. Arab. J. Geosci. 2022, 15, 388. [Google Scholar] [CrossRef]
- Rabah, M.; Basiouny, M.; Ghanem, E.; Elhadary, A. Using RTK and VRS in direct geo-referencing of the UAV imagery. NRIAG J. Astron. Geophys. 2018, 7, 220–226. [Google Scholar] [CrossRef]
- Oniga, V.E.; Breaban, A.I.; Statescu, F. Determining the optimum number of ground control points for obtaining high precision results based on UAS images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hubbard, S.M.; Hugenholtz, C.H. Direct georeferencing UAV-SfM in high-relief topography: Accuracy assessment and alternative ground control strategies along steep inaccessible rock slopes. Remote Sens. 2022, 14, 490. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure-from-motion (SfM) photogrammetry and surface change detection. EArth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Gurturk, M.; Soycan, M. Accuracy assessment of kinematic PPP versus PPK for GNSS flights data processing. Surv. Rev. 2022, 54, 48–56. [Google Scholar] [CrossRef]
- Allahyari, M.; Olsen, M.J.; Gillins, D.T.; Dennis, M.L. Tale of two RTNs: Rigorous evaluation of real-time network GNSS observations. J. Surv. Eng. 2018, 144, 05018001. [Google Scholar] [CrossRef]
- Raza, S.; Al-Kaisy, A.; Teixeira, R.; Meyer, B. The role of GNSS-RTN in transportation applications. Encyclopedia 2020, 2, 83. [Google Scholar] [CrossRef]
- Rokaha, B.; Gautam, B.P.; Kitani, T. Building a reliable and cost-effective RTK-GNSS infrastructure for precise positioning of IoT applications. In Proceedings of the Twelfth International Conference on Mobile Computing and Ubiquitous Network (ICMU), Kathmandu, Nepal, 4–6 November 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Huang, G.; Du, S.; Wang, D. GNSS techniques for real-time monitoring of landslides: A review. Satellite Navigation 2023, 4, 5. [Google Scholar] [CrossRef]
- Miller, Z.M.; Hupy, J.; Chandrasekaran, A.; Shao, G.; Fei, S. Application of postprocessing kinematic methods with UAS remote sensing in forest ecosystems. J. For. 2021, 119, 454–466. [Google Scholar] [CrossRef]
- Van Sickle, J. GPS for Land Surveyors; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar] [CrossRef]
- Anquela, A.; Martín, A.; Berné, J.; Padín, J. GPS and GLONASS static and kinematic PPP results. J. Surv. Eng. 2013, 139, 47–58. [Google Scholar] [CrossRef]
- Angrisano, A.; Dardanelli, G.; Innac, A.; Pisciotta, A.; Pipitone, C.; Gaglione, S. Performance assessment of PPP surveys with open source software using the GNSS GPS–GLONASS–Galileo constellations. Appl. Sci. 2020, 10, 5420. [Google Scholar] [CrossRef]
- Henkel, P.; Iafrancesco, M.; Sperl, A. Precise point positioning with multipath estimation. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 144–149. [Google Scholar] [CrossRef]
- Alkan, R.M.; Saka, M.H.; Ozulu, İ.M.; İlçi, V. Kinematic precise point positioning using GPS and GLONASS measurements in marine environments. Measurement 2017, 109, 36–43. [Google Scholar] [CrossRef]
- Chen, C.; Chang, G. PPPLib: An open-source software for precise point positioning using GPS, BeiDou, Galileo, GLONASS, and QZSS with multi-frequency observations. GPS Solut. 2021, 25, 18. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2738–2745. [Google Scholar] [CrossRef]
- Daakir, M.; Pierrot-Deseilligny, M.; Bosser, P.; Pichard, F.; Thom, C.; Rabot, Y.; Martin, O. Lightweight UAV with on-board photogrammetry and single-frequency GPS positioning for metrology applications. ISPRS J. Photogramm. Remote Sens. 2017, 127, 115–126. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of GNSS, inertial, and multisensor integrated navigation systems, [Book review]. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 26–27. [Google Scholar] [CrossRef]
- Lu, F.; Li, J. Precise point positioning study to use different IGS precise ephemeris. In Proceedings of the 2011 IEEE International Conference on Computer Science and Automation Engineering, Shanghai, China, 10–12 June 2011; Volume 3. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, W.; Han, Y.; Hong, Z.; Shen, S.; Yang, S.; Wang, J. Static and kinematic positioning performance of a low-cost real-time kinematic navigation system module. Adv. Space Res. 2019, 63, 3029–3042. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Morra di Cella, U.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground control point distribution for accurate kilometre-scale topographic mapping using an RTK-GNSS unmanned aerial vehicle and SfM photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Kalacska, M.; Lucanus, O.; Arroyo-Mora, J.P.; Laliberté, É.; Elmer, K.; Leblanc, G.; Groves, A. Accuracy of 3D landscape reconstruction without ground control points using different UAS platforms. Drones 2020, 4, 13. [Google Scholar] [CrossRef]
- Raychaudhuri, S. Introduction to Monte Carlo simulation. In Proceedings of the 2008 Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008. [Google Scholar] [CrossRef]
- Carbonneau, P.E.; Dietrich, J.T. Cost-effective non-metric photogrammetry from consumer-grade sUAS: Implications for direct georeferencing of structure from motion photogrammetry. Earth Surf. Process. Landforms 2016, 42, 473–486. [Google Scholar] [CrossRef]
- Slocum, R.K.; Parrish, C.E. Simulated imagery rendering workflow for UAS-based photogrammetric 3D reconstruction accuracy assessments. Remote Sens. 2017, 9, 396. [Google Scholar] [CrossRef]
- Li, T.; Zhang, B.; Cheng, X.; Westoby, M.J.; Li, Z.; Ma, C.; Hui, F.; Shokr, M.; Liu, Y.; Chen, Z.; et al. Resolving fine-scale surface features on polar sea ice: A first assessment of UAS photogrammetry without ground control. Remote Sens. 2019, 11, 784. [Google Scholar] [CrossRef]
- National Oceanic and Atmospheric Administration. Hydrographic Surveys Specifications and Deliverables. 2022. Available online: https://www.nauticalcharts.noaa.gov/publications/docs/standards-and-requirements/specs/HSSD_2022.pdf (accessed on 1 August 2024).
- Pilartes-Congo, J.; Starek, M.J.; Berryhill, J. Impact of different GNSS solutions on UAS-SfM vertical accuracy for shoreline charting. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 4666–4669. [Google Scholar] [CrossRef]
- Wingtra. WingtraOne Drone: Technical Specifications. Available online: https://wingtra.com/mapping-drone-wingtraone/technical-specifications/ (accessed on 13 June 2021).
- DJI. Phantom 4 RTK User Manual v2.4. Available online: https://dl.djicdn.com/downloads/phantom_4_rtk/20200721/Phantom_4_RTK_User_Manual_v2.4_EN.pdf (accessed on 10 October 2024).
- Septentrio. Altus NR3 User Manual. Available online: https://globalgpssystems.com/wp-content/uploads/2020/03/altus_nr3.pdf (accessed on 10 October 2024).
- Fuegner, A. TxDOT GPS Applications. Available online: https://www.gps.gov/cgsic/states/2012/austin/fuegner.pdf (accessed on 6 October 2024).
- Smith, D.; Choi, K.; Prouty, D.; Jordan, K.; Henning, W. Analysis of the TXDOT RTN and OPUS-RS from the geoid slope validation survey of 2011: Case study for Texas. J. Surv. Eng. 2014, 140, 05014003. [Google Scholar] [CrossRef]
- Juniper Systems, I. Allegro 2 Owner’s Manual. Available online: https://junipersys.com/data/support/allegro-2-manual-english.pdf (accessed on 10 October 2024).
- RIEGL. RIEGL VZ-2000i. Available online: http://www.riegl.com/nc/products/terrestrial-scanning/produktdetail/product/scanner/58/ (accessed on 13 May 2024).
- Leica. Leica TS11/TS15 User Manual. Available online: http://www.engineeringsurveyor.com/software/Leica_Viva_TS11_TS15_User_Manual.pdf (accessed on 18 December 2022).
- Leica. Leica Geosystems Original Accessories: Material Matters. Available online: https://leica-geosystems.com/services-and-support/-/media/files/archived-files/2793c068-e703-4900-a20d-e5e6bba8978e.pdf (accessed on 11 October 2024).
- ASPRS. ASPRS positional accuracy standards for digital geospatial data. Photogramm. Eng. Remote Sens. 2015, 81, A1–A26. [Google Scholar] [CrossRef]
- Over, J.S.R.; Ritchie, A.C.; Kranenburg, C.J.; Brown, J.A.; Buscombe, D.D.; Noble, T.; Sherwood, C.R.; Warrick, J.A.; Wernette, P.A. Processing Coastal Imagery with Agisoft Metashape Professional Edition, Version 1.6—Structure from Motion Workflow Documentation; Technical Report; US Geological Survey: Reston, VA, USA, 2021. [CrossRef]
- Agisoft. Agisoft Metashape User Manual: Professional Edition, Version 1.8. Available online: https://www.agisoft.com/pdf/metashape-pro_1_8_en.pdf (accessed on 17 October 2024).
- Romero-Andrade, R.; Trejo-Soto, M.E.; Vázquez-Ontiveros, J.R.; Hernández-Andrade, D.; Cabanillas-Zavala, J.L. Sampling rate impact on precise point positioning with a low-cost GNSS receiver. Appl. Sci. 2021, 11, 7669. [Google Scholar] [CrossRef]
- Zhang, Q.; Niu, X.; Shi, C. Assessment of the effect of GNSS sampling rate on GNSS/INS relative accuracy on different time scales for precision measurements. Measurement 2019, 145, 583–593. [Google Scholar] [CrossRef]
- Erol, S.; Alkan, R.M.; Ozulu, İ.M.; Ilçi, V. Impact of different sampling rates on precise point positioning performance using online processing service. Geo-Spat. Inf. Sci. 2021, 24, 302–312. [Google Scholar] [CrossRef]
- Wingtra. PPK Geotagging. Available online: https://knowledge.wingtra.com/en/ppk-geotagging (accessed on 1 April 2022).
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. Structure from Motion in the Geosciences; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Salach, A.; Bakuła, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczyński, Z. Accuracy assessment of point clouds from LiDAR and dense image matching acquired using the UAV platform for DTM creation. ISPRS Int. J.-Geo-Inf. 2018, 7, 342. [Google Scholar] [CrossRef]
- Deliry, S.I.; Avdan, U. Accuracy of unmanned aerial systems photogrammetry and structure from motion in surveying and mapping: A review. J. Indian Soc. Remote Sens. 2021, 49, 1997–2017. [Google Scholar] [CrossRef]
- Liu, Y.; Han, K.; Rasdorf, W. Assessment and prediction of impact of flight configuration factors on UAS-based photogrammetric survey accuracy. Remote Sens. 2022, 14, 4119. [Google Scholar] [CrossRef]
- Jiménez-Jiménez, S.I.; Ojeda-Bustamante, W.; Marcial-Pablo, M.d.J.; Enciso, J. Digital terrain models generated with low-cost UAV photogrammetry: Methodology and accuracy. ISPRS Int. J.-Geo-Inf. 2021, 10, 285. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform | Wingtra | Wingtra | Phantom 4 | Phantom 4 |
|---|---|---|---|---|
| Flight mode | PPK #1 | PPK #2 | RTN | PPK |
| Number of photos | 271 | 120 | 610 | 610 |
| Flying height AGL (m) | 75 | 120 | 59 | 59 |
| GSD (cm/px) | 1.0 | 1.6 | 1.6 | 1.6 |
| Flight | 80% sidelap | 80% sidelap | Double | Double |
| design | 70% endlap | 70% endlap | grid | grid |
| Min (cm) | Max (cm) | Mean (cm) | Median (cm) | Sigma (cm) | |
|---|---|---|---|---|---|
| 1 s | 2.44 | 22.16 | 8.35 | 4.31 | 7.23 |
| 5 s | 2.73 | 8.79 | 4.77 | 3.78 | 2.44 |
| 15 s | 1.38 | 8.81 | 4.54 | 4.89 | 2.79 |
| 30 s | 1.87 | 8.36 | 4.37 | 3.21 | 2.43 |
| Min (cm) | Max (cm) | Mean (cm) | Median (cm) | Sigma (cm) | |
|---|---|---|---|---|---|
| 1 s | 2.44 | 128.42 | 40.91 | 26.44 | 37.32 |
| 5 s | 2.73 | 68.29 | 28.17 | 24.83 | 20.05 |
| 15 s | 1.38 | 121.36 | 29.49 | 20.55 | 27.51 |
| 30 s | 1.87 | 79.83 | 24.18 | 16.93 | 21.48 |
| Survey Mode | PPK Sample Rate (s) | Mean (cm) | Sigma (cm) | RMSEz (cm) |
|---|---|---|---|---|
| Total station | 1 | −8.74 | 1.42 | 8.85 |
| RTN GNSS | 1 | −8.32 | 2.42 | 8.66 |
| Total station | 30 | −8.26 | 1.31 | 8.36 |
| RTN GNSS | 30 | −7.84 | 2.27 | 8.16 |
| Transect 1 | Transect 2 | Transect 3 | Transect 4 | |
|---|---|---|---|---|
| Mean of differences (m) | 0.080 | 0.055 | 0.072 | 0.093 |
| Std. dev. of differences (m) | 0.018 | 0.047 | 0.021 | 0.014 |
| RMSEz (m) | 0.082 | 0.073 | 0.075 | 0.094 |
| Processing Mode | Dataset | RMSEz × 1.96 (cm) | Result |
|---|---|---|---|
| RTN | Phantom 4 (RTN mode) | 14.25 | Pass |
| PPK (Local Base, 1 s) | Phantom 4 (PPK mode) | 16.54 | Pass |
| PPK (Local Base, 1 s) | WingtraOne (75 m AGL) | 10.37 | Pass |
| PPK (Local Base, 1 s) | Wingtra (120 m AGL) | 17.35 | Pass |
| PPP | Wingtra (75 m AGL) | 64.41 | Fail |
| PPP | Wingtra (120 m AGL) | 177.97 | Fail |
| Autonomous | Wingtra (75 m AGL) | 1864.76 | Fail |
| Autonomous | Wingtra (120 m AGL) | 3070.38 | Fail |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pilartes-Congo, J.A.; Simpson, C.; Starek, M.J.; Berryhill, J.; Parrish, C.E.; Slocum, R.K. Empirical Evaluation and Simulation of GNSS Solutions on UAS-SfM Accuracy for Shoreline Mapping. Drones 2024, 8, 646. https://doi.org/10.3390/drones8110646
Pilartes-Congo JA, Simpson C, Starek MJ, Berryhill J, Parrish CE, Slocum RK. Empirical Evaluation and Simulation of GNSS Solutions on UAS-SfM Accuracy for Shoreline Mapping. Drones. 2024; 8(11):646. https://doi.org/10.3390/drones8110646
Chicago/Turabian StylePilartes-Congo, José A., Chase Simpson, Michael J. Starek, Jacob Berryhill, Christopher E. Parrish, and Richard K. Slocum. 2024. "Empirical Evaluation and Simulation of GNSS Solutions on UAS-SfM Accuracy for Shoreline Mapping" Drones 8, no. 11: 646. https://doi.org/10.3390/drones8110646
APA StylePilartes-Congo, J. A., Simpson, C., Starek, M. J., Berryhill, J., Parrish, C. E., & Slocum, R. K. (2024). Empirical Evaluation and Simulation of GNSS Solutions on UAS-SfM Accuracy for Shoreline Mapping. Drones, 8(11), 646. https://doi.org/10.3390/drones8110646