
Analytical and Dynamical Study of Solitary Waves in a Fractional Magneto-Electro-Elastic System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- : Represents the acceleration of the quantity with respect to time, indicating how the rate of change of over time influences the wave’s evolution.
- : A constant representing the square of the wave velocity, influencing the speed at which the wave propagates.
- : Describes the curvature of the wavefront in the spatial dimension x, showing how wave velocity affects the spatial variation of , thereby impacting wave propagation.
- : Represents a nonlinear interaction within the system, indicating how the nonlinearity of the system influences the wave’s behavior.
- : Accounts for the effect of nonlinearity on the time evolution of , showing how nonlinearities influence the time-dependent behavior.
2. Exploring the Truncated -Fractional Derivative
- where Ω is a constant.
3. Methodology
4. Mathematical Exploration
4.1. Solution of Equation (4) Using Direct Algebraic Method
4.2. Evaluation from a Physical Perspective
5. Dynamical Analysis of Equation (4)
5.1. Sensitivity Analysis of Equation (17)
5.2. Core Elements of Chaos Theory
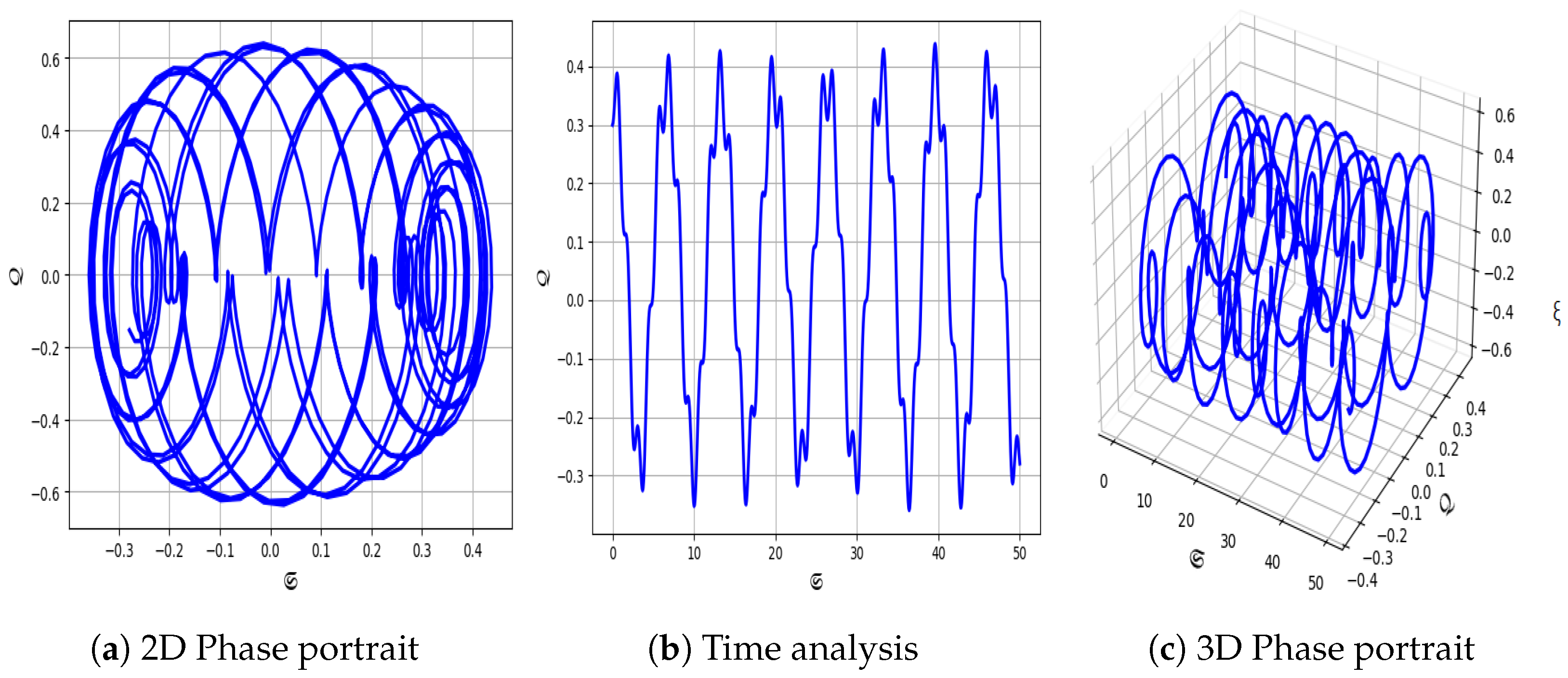
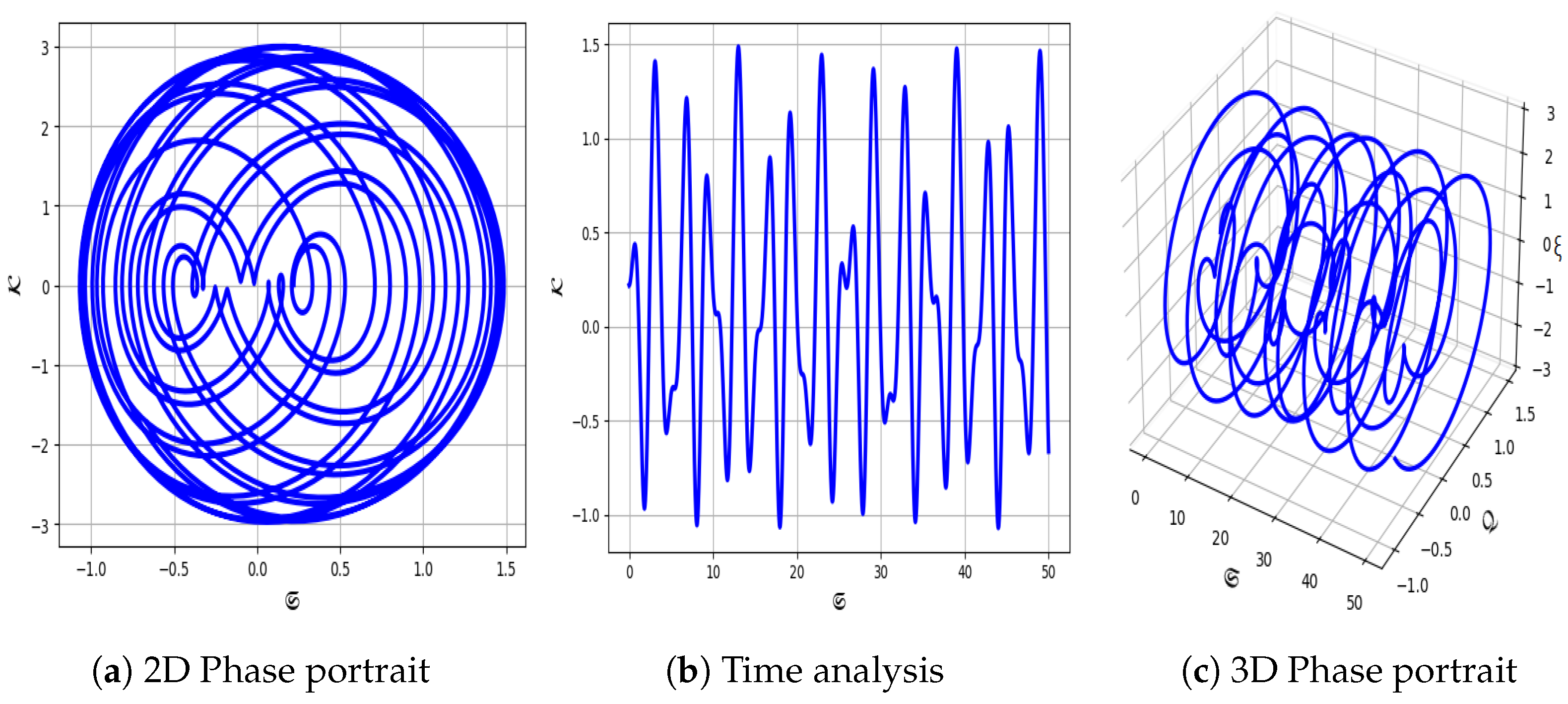
- In Figure 13, the system parameters are set to and with , again demonstrating quasi-periodic behavior.
- In Figure 14, for and with , the system continues to exhibit quasi-periodic behavior.
- In contrast, Figure 15 uses smaller values and with initial conditions . For this configuration, the system displays clear periodic behavior.
- In Figure 16, we consider minimal values and with initial conditions . Under these settings, the system exhibits quasi-periodic behavior.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| NLPDEs | Nonlinear partial differential equations |
| ODEs | ordinary differential equations |
| MEEC | magneto electro-elastic circular |
| FNLWE | Fractional nonlinear longitudinal wave equation |
| NLWE | nonlinear longitudinal wave equation |
References
- Murad, M.A.S.; Ismael, H.F.; Sulaiman, T.A. Various exact solutions to the time-fractional nonlinear Schrödinger equation via the new modified Sardar sub-equation method. Phys. Scr. 2024, 99, 085252. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Breather wave solutions for an integrable (3+1)-dimensional combined pKP–BKP equation. Chaos Solitons Fractals 2024, 182, 114886. [Google Scholar] [CrossRef]
- Wang, K.L.; Wei, C.F. Novel optical soliton solutions of the fractional perturbed Schrödinger equation in optical fiber. Fractals 2024, 33, 2450147. [Google Scholar] [CrossRef]
- Cattani, C.; Sulaiman, T.A.; Baskonus, H.M.; Bulut, H. Solitons in an inhomogeneous Murnaghan’s rod. Eur. Phys. J. Plus 2018, 133, 228. [Google Scholar] [CrossRef]
- Muhammad, J.; Younas, U.; Hussain, E.; Ali, Q.; Sediqmal, M.; Kedzia, K.; Jan, A.Z. Solitary wave solutions and sensitivity analysis to the space-time β-fractional Pochhammer–Chree equation in elastic medium. Sci. Rep. 2024, 14, 28383. [Google Scholar] [CrossRef]
- Younas, U.; Hussain, E.; Muhammad, J.; Sharaf, M.; Meligy, M.E. Chaotic Structure, Sensitivity Analysis and Dynamics of Solitons to the Nonlinear Fractional Longitudinal Wave Equation. Int. J. Theor. Phys. 2025, 64, 42. [Google Scholar] [CrossRef]
- Younas, U.; Hussain, E.; Muhammad, J.; Garayev, M.; El-Meligy, M. Bifurcation analysis, chaotic behavior, sensitivity demonstration and dynamics of fractional solitary waves to nonlinear dynamical system. Ain Shams Eng. J. 2025, 16, 103242. [Google Scholar] [CrossRef]
- Malik, S.; Hashemi, M.S.; Kumar, S.; Rezazadeh, H.; Mahmoud, W.; Osman, M.S. Application of new Kudryashov method to various nonlinear partial differential equations. Opt. Quantum Electron. 2023, 55, 8. [Google Scholar] [CrossRef]
- Malik, S.; Kumar, S.; Akbulut, A.; Rezazadeh, H. Some exact solitons to the (2 + 1)-dimensional Broer-Kaup-Kupershmidt system with two different methods. Opt. Quantum Electron. 2023, 55, 1215. [Google Scholar] [CrossRef]
- Khatkar, A.; Shehla, F.; Sharma, A.; Kumar, S.; Yadav, R.; Malik, S. Nonlinear Shrödinger equation having self-phase modulation without chromatic dispersion: Sensitivity analysis and novel soliton solutions. Nonlinear Dyn. 2025, 113, 13681–13697. [Google Scholar] [CrossRef]
- Zayed, E.M.; Alurrfi, K.A.; Hasek, A.M.; Arnous, A.H.; Secer, A.; Ozisik, M.; Kumar, S. Perturbations of optical solitons in magneto-optic waveguides incorporating multiplicative white noise and sixth-order dispersion: A study of the Sasa-Satsuma equation. Pramana 2025, 99, 22. [Google Scholar] [CrossRef]
- Kumar, S.; Malik, S. A new analytic approach and its application to new generalized Korteweg-de Vries and modified Korteweg-de Vries equations. Math. Methods Appl. Sci. 2024, 47, 11709–11726. [Google Scholar] [CrossRef]
- Bhan, C.; Karwasra, R.; Malik, S.; Kumar, S. Bifurcation, chaotic behavior and soliton solutions to the KP-BBM equation through new Kudryashov and generalized Arnous methods. AIMS Math. 2024, 9, 8749–8767. [Google Scholar] [CrossRef]
- Qu, H.D.; Liu, X.; Lu, X.; ur Rahman, M.; She, Z.H. Neural network method for solving nonlinear fractional advection-diffusion equation with spatiotemporal variable-order. Chaos Solitons Fractals 2022, 156, 111856. [Google Scholar] [CrossRef]
- Wu, X.S.; Liu, J.G. Solving the variable coefficient nonlinear partial differential equations based on the bilinear residual network method. Nonlinear Dyn. 2024, 112, 8329–8340. [Google Scholar] [CrossRef]
- Waseem; Yun, W.; Boulaaras, S.; ur Rahman, M. Exploring hybrid Sisko nanofluid on a stretching sheet: An improved cuckoo search-based machine learning approach. Eur. Phys. J. Plus 2024, 139, 760. [Google Scholar] [CrossRef]
- Xue, C.X.; Pan, E.; Zhang, S.Y. Solitary waves in a magneto-electro-elastic circular rod. Smart Mater. Struct. 2011, 20, 105010. [Google Scholar] [CrossRef]
- Roshid, M.M.; Uddin, M.; Hossain, M.M. Investigation of rogue wave and dynamic solitary wave propagations of the M-fractional (1+1)-dimensional longitudinal wave equation in a magnetic-electro-elastic circular rod. Indian J. Phys. 2025, 99, 1787–1803. [Google Scholar] [CrossRef]
- Djaouti, A.M.; Roshid, M.M.; Abdeljabbar, A.; Al-Quran, A. Bifurcation analysis and solitary wave solution of fractional longitudinal wave equation in magneto-electro-elastic (MEE) circular rod. Results Phys. 2024, 64, 107918. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, S.; Bohra, N.; Pillai, G.; Kapoor, R.; Rao, J. Exploring soliton solutions and interesting wave-form patterns of the (1+1)-dimensional longitudinal wave equation in a magnetic-electro-elastic circular rod. Opt. Quantum Electron. 2024, 56, 1029. [Google Scholar] [CrossRef]
- Li, B.; Liang, H.; He, Q. Multiple and generic bifurcation analysis of a discrete Hindmarsh-Rose model. Chaos Solitons Fractals 2021, 146, 110856. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, X.; He, Q. Multi-scale systemic risk and spillover networks of commodity markets in the bullish and bearish regimes. N. Am. J. Econ. Financ. 2022, 62, 101766. [Google Scholar] [CrossRef]
- Zhu, X.; Xia, P.; He, Q.; Ni, Z.; Ni, L. Coke price prediction approach based on dense GRU and opposition-based learning salp swarm algorithm. Int. J. Bio-Inspired Comput. 2023, 21, 106–121. [Google Scholar] [CrossRef]
- Eskandari, Z.; Avazzadeh, Z.; Khoshsiar Ghaziani, R.; Li, B. Dynamics and bifurcations of a discrete-time Lotka-Volterra model using nonstandard finite difference discretization method. Math. Methods Appl. Sci. 2022, 48, 7197–7212. [Google Scholar] [CrossRef]
- Borhan, J.R.M.; Mamun Miah, M.; Duraihem, F.Z.; Iqbal, M.A.; Ma, W.X. New optical soliton structures, bifurcation properties, chaotic phenomena, and sensitivity analysis of two nonlinear partial differential equations. Int. J. Theor. Phys. 2024, 63, 183. [Google Scholar] [CrossRef]
- Li, Z.; Lyu, J.; Hussain, E. Bifurcation, chaotic behaviors and solitary wave solutions for the fractional Twin-Core couplers with Kerr law non-linearity. Sci. Rep. 2024, 14, 22616. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Hussain, E.; Ma, W.X.; Li, Z.; Ragab, A.E.; Khalaf, T.M. Qualitative analysis and new variety of solitons profiles for the (1+1)-dimensional modified equal width equation. Chaos Solitons Fractals 2024, 187, 115353. [Google Scholar] [CrossRef]
- Hussain, E.; Li, Z.; Shah, S.A.A.; Az-Zo’bi, E.A.; Hussien, M. Dynamics study of stability analysis, sensitivity insights and precise soliton solutions of the nonlinear (STO)-Burger equation. Opt. Quantum Electron. 2023, 55, 1274. [Google Scholar] [CrossRef]
- Almusawa, H.; Jhangeer, A. Soliton solutions, Lie symmetry analysis and conservation laws of ionic waves traveling through microtubules in live cells. Results Phys. 2022, 43, 106028. [Google Scholar] [CrossRef]
- Samreen, M. Exploring quasi-periodic behavior, bifurcation, and traveling wave solutions in the double-chain DNA model. Chaos Solitons Fractals 2025, 192, 116052. [Google Scholar] [CrossRef]
- Ali, K.K.; Faridi, W.A.; Tarla, S. Phase trajectories and Chaos theory for dynamical demonstration and explicit propagating wave formation. Chaos Solitons Fractals 2024, 182, 114766. [Google Scholar] [CrossRef]
- Ali, K.K. Kudryashov-Sinelshchikov equation: Phase portraits, bifurcation analysis and solitary waves. Opt. Quantum Electron. 2024, 56, 1627. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
San, S.; Beenish; Alshammari, F.S. Analytical and Dynamical Study of Solitary Waves in a Fractional Magneto-Electro-Elastic System. Fractal Fract. 2025, 9, 309. https://doi.org/10.3390/fractalfract9050309
San S, Beenish, Alshammari FS. Analytical and Dynamical Study of Solitary Waves in a Fractional Magneto-Electro-Elastic System. Fractal and Fractional. 2025; 9(5):309. https://doi.org/10.3390/fractalfract9050309
Chicago/Turabian StyleSan, Sait, Beenish, and Fehaid Salem Alshammari. 2025. "Analytical and Dynamical Study of Solitary Waves in a Fractional Magneto-Electro-Elastic System" Fractal and Fractional 9, no. 5: 309. https://doi.org/10.3390/fractalfract9050309
APA StyleSan, S., Beenish, & Alshammari, F. S. (2025). Analytical and Dynamical Study of Solitary Waves in a Fractional Magneto-Electro-Elastic System. Fractal and Fractional, 9(5), 309. https://doi.org/10.3390/fractalfract9050309