Abstract
Controllability is a fundamental issue in the field of fractional complex network control, yet it has not received adequate attention in the past. This paper is dedicated to exploring the controllability of complex networks involving the Caputo fractional derivative. By utilizing the Cayley–Hamilton theorem and Laplace transformation, a concise proof is given to determine the controllability of linear fractional complex networks. Subsequently, leveraging the Schauder Fixed-Point theorem, controllability Gramian matrix, and fractional calculus theory, we derive controllability conditions for nonlinear fractional complex networks with a weighted adjacency matrix and Laplacian matrix, respectively. Finally, a numerical method for the controllability of fractional complex networks is obtained using Matlab (2021a)/Simulink (2021a). Three examples are provided to illustrate the theoretical results.
1. Introduction
In recent decades, due to the widespread existence of complex networks in nature and society, complex networks have been undergoing a period of rapid development in various interdisciplinary research fields, particularly in engineering [1], mathematics [2], physics [3], biology [4] and other related areas. The ultimate goal of researching complex networks is to control them to facilitate our lives. Despite significant efforts being dedicated to comprehending the interactions between complex networks and their dynamic behaviors, controlling these networks remains a prominent challenge [5].
In order to establish a framework for controlling complex networks, a fundamental and essential step is to study their controllability. Controllability ensures that by manipulating a subset of nodes with appropriate control inputs, every node within the network can be steered to the desired state [6,7]. Many scholars from the fields of control, physics, and mathematics [8,9,10,11] have been inspired by the pioneering paper on the controllability of complex networks [12]. Liu et al. [8] analyzed the controllability of discrete-time dynamic networks with both switching and fixed interaction topologies. Cai [9] utilized the condition number of a matrix as a metric to quantitatively assess controllability. Chen [10] incorporated pinning control strategies into the study of controllability in directed networks. Meanwhile, Whalen et al. [11] developed a group representational framework to tackle the controllability of nonlinear networks that exhibit explicit symmetries.
Due to its memory and hereditary properties, fractional calculus has garnered considerable attention across various scientific fields and is widely adopted in science and engineering [13,14,15,16,17,18,19,20]. Fractional operators have been integrated into traditional complex networks, significantly improving model accuracy. It is worth noting that while the controllability of integer-order complex networks is relatively mature, the controllability results of fractional networks are still in their infancy. Some papers have addressed the controllability of fractional systems [21,22,23,24,25], but only a few papers have delved into the controllability of fractional complex networks because of their inherent complexity and long memory characteristics. Zhang et al. [26] examined the controllability of linear fractional directed complex networks, and subsequently, they [27] extended this work to explore the controllability of linear fractional dynamical networks with specific topological structures. However, given the ubiquitous nature of nonlinearity, it is imperative to consider the control of fractional complex networks with nonlinear dynamics. As far as we know, no research has yet been explored on the controllability of nonlinear fractional complex networks.
Motivated by the above analysis, this manuscript aims to address the controllability issues for fractional complex networks through rigorous mathematical theory. The distinctive contributions are summarized as follows: (i) A concise technique is established to prove the controllability of fractional complex networks with linear dynamic behavior. This allows the controllability of similar networks to be easily determined. (ii) For the first time, nonlinear fractional complex networks with weighted adjacency matrices or Laplacian matrices are shown to be controllable, effectively making up for the deficiency left by existing methods. (iii) Matlab/Simulink is used to obtain a numerical implementation for the controllability of fractional complex networks. Three examples are presented to validate theoretical results.
2. Preliminaries
This section presents algebraic graph theory and some necessary theories since we will use them later.
A graph is defined by , where and denote node sets and link sets, respectively. Additionally, represents a link from node to node . The concepts of a directed graph, undirected graph, and adjacency matrix can be found in [28,29,30].
Definition 1
([31]). The Caputo fractional derivative of order p of a function f is defined by
where and is the Gamma function.
Definition 2
([6]). The two-parameter Mittag–Leffler matrix function for a matrix is defined as
Note that when , becomes a one-parameter Mittag–Leffler matrix function. Additionally, the Laplace transform of is given by
Lemma 1
([32]). For , the Laplace transform of Caputo fractional derivative is given by
In particular, if , then
where .
Lemma 2
(Schauder Fixed-Point theorem [33]). Let M be a non-empty, closed, bounded, convex subset of a Banach space X. Suppose is a compact operator, then G has a fixed point.
3. Controllability Analysis of Linear Fractional Complex Networks
In this part, a fractional complex network with linear dynamic behavior is described as follows:
in which , represents the state of the node i, denotes the intrinsic dynamics, and denotes the weight of the network. Here, m represents the number of controllers and is the outer controller. For example, the can stand for the command from a leader in a social network or the signal from equipment in a sensor network. represents the signal strength of the outer controller.
Let be the whole state of the network (4), and be the total outer controller. The linear network (4) can be reformulated as
where A represents the weighted (unweighted) adjacency matrix, , and stands for the control matrix.
Definition 3
([7]). For a finite time , any initial state and any final state , if there exists a controller that satisfies , then the linear fractional complex network (4) is called controllable on I.
Lemma 3
([34]). The linear fractional complex network (4) is controllable if the controllability Gramian matrix
is invertible.
For the linear fractional complex network (4), a controllability result is proposed in [26], but we give a more concise proof below.
Theorem 1.
The fractional complex network (4) is controllable if controllability matrix
is of full rank, which is .
Proof.
By virtue of Laplace transformation and inverse Laplace transformation, the solution of (5) can be derived as follows:
When , from (9) and (10), one has
Let
Then, applying (11) and (12) leads to
in which . Note that for any and in , the adequacy and necessity condition with an external controller vector satisfying (13) is that
The theorem is, thus, proved. □
4. Controllability Analysis of Nonlinear Fractional Complex Networks
Complex networks with different topology structures can describe different connection relationships in complex worlds. This section mainly focuses on nonlinear fractional complex networks with a weighted adjacency matrix and Laplacian matrix.
4.1. Nonlinear Networks Represented by a Weighted Adjacency Matrix
Consider a nonlinear fractional complex network with a weighted adjacency matrix depicted by
where , expresses the state of node i. denotes the weight of a link , m represents the number of controllers, is the outer controller, and is the nonlinear continuous function.
The nonlinear fractional complex network (16) can be recast into the following vector form
Here, expresses the state vector; represents the total outer controller; stands for the weighted adjacency matrix; represents the control matrix; is the nonlinear vector function.
Similar to Definition 3, the definition of controllability for network (16) can also be given.
Henceforth, let us make the following assumptions:
There is a positive constant M that satisfies
The vector function that is nonlinear meets the Lipschitz condition in vector form as follows:
where , , and are any vectors.
Let
Theorem 2.
Proof.
Give a Banach space
which is endowed with the norm
By utilizing (15), it is possible to construct a controller that can regulate any . In this case, the controller can be constructed as
Now, we will prove that the nonlinear operator has a fixed point, which is also a solution of (17). The G is designed as
Substituting (18) into (19) yields
If the nonlinear operator G satisfies , then in view of Lemma 3; that is, the nonlinear fractional complex network (16) can be steered from initial state to desired final state by the controller within a finite time . By assuming and using Equation (20), it is true that
Taking into account derivatives of , one gets
From (22), it follows that
Define the subspace of X as . It is easy to see that the set is closed, bounded and convex. Let , from (21) and (23), one has
Thus, we obtain that the G maps into itself.
In what follows, we will prove that the G is continuous on . Let be a sequence of functions in with
It can be deduced directly that
and
From (25), one obtains
Combining (24) and (26) yields
Thus, the nonlinear operator G is continuous on .
Furthermore, we will demonstrate that the set is relatively compact. Given that , it is shown that
and
Clearly, one has
As a result, is equicontinuous, and it is not difficult to obtain that is uniformly bounded. By applying the well-known Arzelà–Ascoli theorem [33], the set is relatively compact. Moreover, since the nonlinear operator G is continuous on the bounded set in X and maps it into the relatively compact set in X, it can be conluded that G is compact. According to Lemma 2, the nonlinear operator G exists at a fixed point, which means the nonlinear fractional complex network (16) is controllable. This concludes the demonstration of Theorem 2. □
Remark 2.
The nonlinear fractional complex network (16) represented by a pair is controllable if the system is controllable and conditions hold.
4.2. Nonlinear Networks Represented by a Laplacian Matrix
A nonlinear fractional complex network with a Laplacian matrix can be described as follows:
in which all parameters represent the same meaning as (16).
The nonlinear network (27) can be recast as follows:
in which is the Laplacian matrix of network (27), , and is the out-degree of node i.
Theorem 3.
Proof of Theorem 3.
Similar to Theorem 2, Theorem 3 can be proved. Therefore, the proof is omitted here. □
5. Numerical Implementation
In this part, a numerical algorithm is given to demonstrate the controllability of the networks mentioned above with the help of the FOTF Toolbox [36]. Based on the maximum matching method [12], the minimum of the driven nodes of fractional complex networks can be obtained. For convenience, we take fractional order and the final time .
Before the simulation, we will state two facts that are used to build the Matlab/Simulink simulation model.
Firstly, the control function u in (18) can be written as , where
and
The Simulink simulation model corresponding to control u is shown in Figure 1. Here, the Interpreted Matlab Function 1 and Interpreted Matlab Function 2 blocks are Matlab functions of and , respectively. The integral in is computed using the trapezoidal formula.
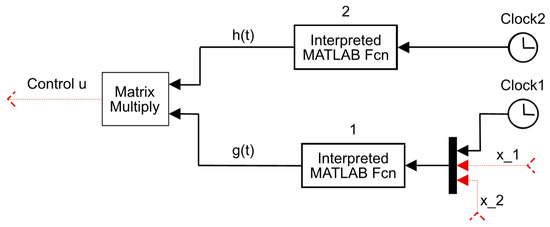
Figure 1.
Simulink block diagram of the control u.
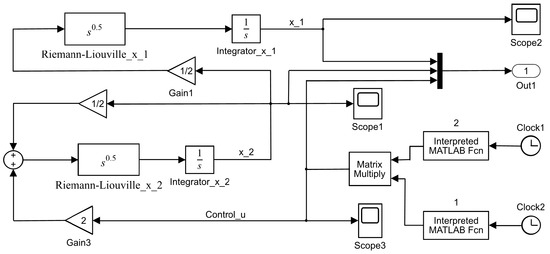
Secondly, the Caputo derivative Simulink block is constructed using the Riemann–Liouville block created by Professor Oustaloup with the combination of the classical integrator block. As we can see in Figure 2, by connecting a Riemann–Liouville differentiator of order to , the signal can be defined.

Figure 2.
The output signal and its Caputo derivative of order .
Example 1.
Consider a linear fractional complex network (4) comprising two nodes. The weighted adjacency matrix, control matrix, and diagonal matrix are presented as
respectively. In the light of Theorem 1, the fractional complex network (4) with linear dynamic behavior can be controlled. Specifically, we used the Matlab/Simulink method. The block diagram of the simulation is depicted in Figure 3.
Figure 3.
Matlab/Simulink block diagram for the network (4) in Example 1.
Here, the initial and final values of nodes and are taken as and , respectively. It is known that the Mittag–Leffler matrix function for matrix can be written as
where and . The Gramian matrix of the network (4) is
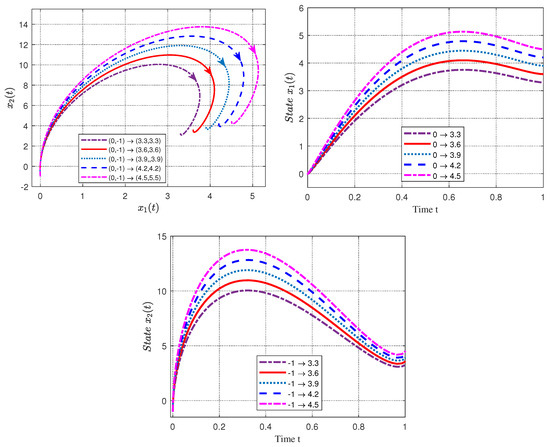
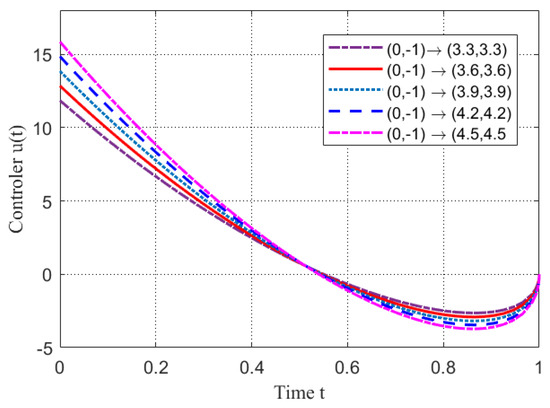
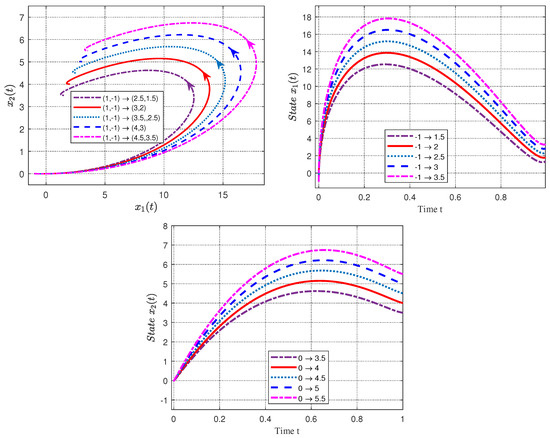
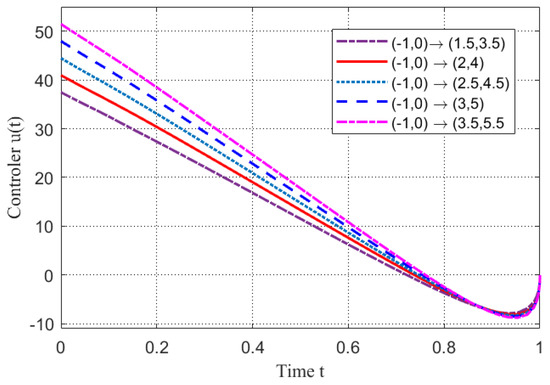
Using Matlab/Simulink, the controlled trajectories and steering control
are computed and are depicted in Figure 4 and Figure 5. Then, we can see that a linear fractional complex network with two nodes can be steered from the initial value to the desired value .
Figure 4.
The state trajectories of the linear fractional complex network in Example 1.
Figure 5.
The trajectory of outer controller imposed on node in Example 1.
Example 2.
Consider a nonlinear fractional complex network (16) comprising two nodes, where weighted adjacency matrix, control matrix, and nonlinear function satisfying conditions are given as follows:
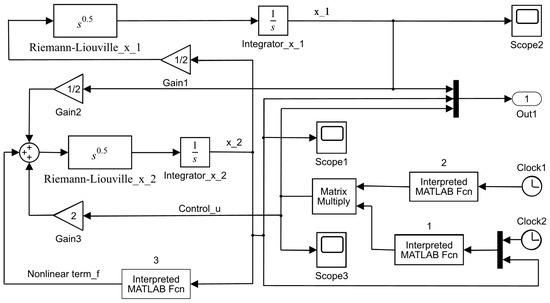
respectively. According to Remark 1, the system is controllable, which means that a nonlinear network (16) with a weighted adjacency matrix is controllable. To be specific, we used the Matlab/Simulink method. The block diagram of the simulation is depicted in Figure 6.
Figure 6.
Matlab/Simulink block diagram for the network (16) in Example 2.
Here, the initial and final values of nodes and are taken as and , respectively. It is known that the Mittag–Leffler matrix function for a given matrix A can be written as
where
and
The corresponding Gramian matrix of network (16) is
Using Matlab/Simulink, the controlled trajectories and steering control
are computed and are depicted in Figure 7 and Figure 8. Then, we can see that the nonlinear network with two nodes can be steered from the initial value to the desired value .
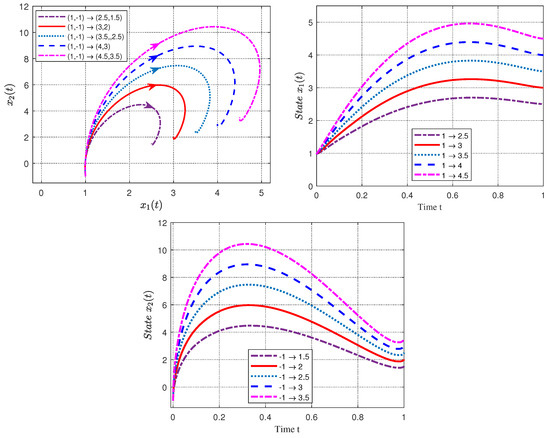
Figure 7.
The state trajectories of a nonlinear fractional complex network with a weighted adjacency matrix in Example 2.
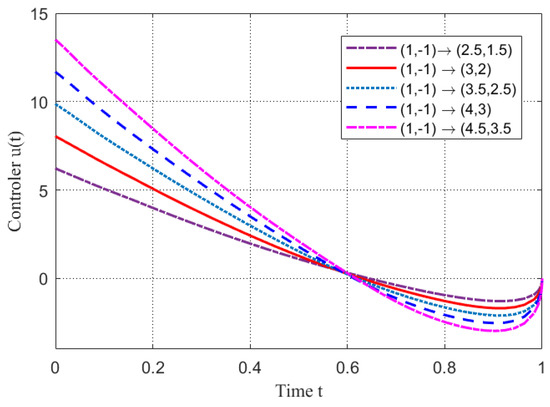
Figure 8.
The trajectories of outer controller imposed on node in Example 2.
Example 3.
Consider a nonlinear fractional directed network (27) with a Laplacian matrix. The Laplacian matrix, control matrix, and nonlinear function satisfying conditions are given as
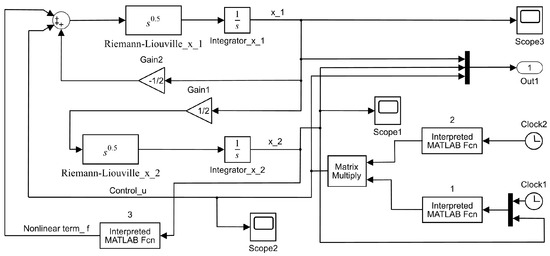
respectively. On the basis of Remark 1, the system is controllable, which indicates that a nonlinear directed network (27) with a Laplacian matrix is controllable. Concretely, we used the Matlab/Simulink method. The block diagram of the simulation is depicted in Figure 9.
Figure 9.
Matlab/Simulink block diagram for the network (27) in Example 3.
Here, the initial and final values of nodes and are taken as and , respectively. It is known that the Mittag–Leffler matrix function for a given matrix can be written as
where and . The corresponding Gramian matrix of the network (27) is
Using Matlab/Simulink, the controlled trajectories and steering control
are computed and are depicted in Figure 10 and Figure 11. Then, we can see that a nonlinear fractional complex network with two nodes can be steered from the initial value to the desired value .
Figure 10.
The state trajectories of a nonlinear fractional complex network with Laplacian matrix in Example 3.
Figure 11.
The trajectories of outer controller imposed on node in Example 3.
6. Conclusions
Considering the fact that controllability is one of the most basic problems in the field of fractional complex network control and complex networks are typically nonlinear in real-world applications, this paper investigates the controllability problems of nonlinear fractional complex networks with a weighted adjacency matrix or Laplacian matrix. What is worth mentioning is that all controllability results obtained are proved by means of rigorous mathematical theory. Our findings indicate that the fractional complex networks with linear dynamic behavior can be controlled if the controllability matrix is of full rank. More importantly, the controllability criteria of nonlinear fractional complex networks are deduced, which provides a theoretical framework for the controllability analysis. Finally, three corresponding examples clearly show that it is convenient and efficient to obtain the controllability of given networks by using a newly developed technique. It is believed that this manuscript will play a crucial role in the controllability analysis and controller design of nonlinear fractional complex networks. In the future, we will continue to focus on the following interesting topics:
- •
- Solve the other control problems like optimal control, approximate controllability, etc.;
- •
- Develop the controllability and observability on complex fractional time-varying systems;
- •
- Implement controllability for complex time-varying systems numerically using the Matlab/Simulink method.
Author Contributions
Conceptualization, W.M. and X.B.; methodology, X.B; writing—original draft preparation, X.B.; writing—review and editing, W.M. and X.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Natural Science Foundation of Gansu Province (No. 22JR5RA184) and the Fundamental Research Funds for the Central Universities (Grant No. 31920230174).
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cui, L.Y.; Kumara, S.; Albert, R. Complex networks: An engineering view. IEEE Circuits Syst. Mag. 2010, 10, 10–25. [Google Scholar] [CrossRef]
- MacArthur, B.D.; Sánchez-García, R.J.; Anderson, J.W. Symmetry in complex networks. Discret. Appl. Math. 2008, 156, 3525–3531. [Google Scholar] [CrossRef]
- Strogatz, S.H. Exploring complex networks. Nature 2001, 410, 268–276. [Google Scholar] [CrossRef]
- Barabási, A.L.; Oltvai, Z.N. Network biology: Understanding the cell’s functional organization. Nat. Rev. Genet. 2004, 5, 101–113. [Google Scholar] [CrossRef]
- Yuan, Z.; Zhao, C.; Di, Z.; Wang, W.-X.; Lai, Y.-C. Exact controllability of complex networks. Nat. Commun. 2013, 4, 2447. [Google Scholar] [CrossRef]
- Balachandran, K.; Govindaraj, V.; Rivero, M.; Trujillo, J.J. Controllability of fractional damped dynamical systems. Appl. Math. Comput. 2015, 257, 66–73. [Google Scholar] [CrossRef]
- Xiang, L.; Chen, F.; Ren, W.; Chen, G. Advances in network controllability. IEEE Circuits Syst. Mag. 2019, 19, 8–32. [Google Scholar] [CrossRef]
- Liu, B.; Chu, T.; Wang, L.; Xie, G. Controllability of a leader-follower dynamic network with switching topology. IEEE Trans. Autom. Control 2008, 53, 1009–1013. [Google Scholar] [CrossRef]
- Cai, N. On quantitatively measuring controllability of complex networks. Phys. A 2017, 474, 282–292. [Google Scholar] [CrossRef]
- Chen, G. Pinning control and controllability of complex dynamical networks. Int. J. Autom. Comput. 2017, 14, 1–9. [Google Scholar] [CrossRef]
- Whalen, A.J.; Brennan, S.N.; Sauer, T.D.; Schiff, S.J. Observability and controllability of nonlinear networks: The role of symmetry. Phys. Rev. X 2015, 5, 011005. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Slotine, J.J.; Barabási, A.L. Controllability of complex networks. Nature 2011, 473, 167–173. [Google Scholar] [CrossRef]
- Ma, W.; Ma, N.; Dai, C.; Chen, Y.Q.; Wang, X. Fractional modeling and optimal control strategies for mutated COVID-19 pandemic. Math. Methods Appl. Sci. 2022, 1–25. [Google Scholar] [CrossRef]
- Sun, H.G.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y.Q. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equation; John Wiley and Sons: New York, NY, USA, 1993. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Li, C.P.; Deng, W.H.; Xu, D. Chaos synchronization of the Chua system with a fractional order. Phys. A 2006, 360, 171–185. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.Q.; Vinagre, B.M.; Xue, D.Y.; Feliu, V. Fractional-Order Systems and Controls; Springer-Verlag: London, UK, 2010. [Google Scholar]
- Ma, W.; Li, Z.; Ma, N. Synchronization of discrete fractional-order complex networks with and without unknown topology. Chaos 2022, 32, 013112. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Ahn, H.S.; Xue, D.Y. Robust controllability of interval fractional order linear time invariant systems. Signal Process. 2006, 86, 2794–2802. [Google Scholar] [CrossRef]
- Balachandran, K.; Govindaraj, V.; Rodríguez-Germá, L.; Trujillo, J.J. Controllability results for nonlinear fractional order dynamical systems. J. Optim. Theory Appl. 2013, 156, 33–44. [Google Scholar] [CrossRef]
- Liu, J.; Liu, S.; Li, H. Controllability result of nonlinear higher order fractional damped dynamical system. J. Nonlinear Sci. Appl. 2017, 10, 325–337. [Google Scholar] [CrossRef]
- Ahmad, B.; Nieto, J.J. Existence results for a coupled system of nonlinear fractional differential equations with three-point boundary conditions. Comput. Math. Appl. 2009, 58, 1838–1843. [Google Scholar] [CrossRef]
- Govindaraj, V.; Balachandran, K.; George, R.K. Numerical Approach for the Controllability of Composite Fractional Dynamical Systems. J. Appl. Nonlinear Dyn. 2018, 7, 59–72. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, D.Y.; Xu, B.B.; Zhang, R.F. Controllability of fractional-order directed complex networks. Mod. Phys. Lett. B 2014, 28, 1450211. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, D.; Xu, B.B.; Zhou, R. Controllability of fractional-order directed complex networks with self loop and double edge structure. J. Circuits Syst. Comput. 2015, 24, 1550087. [Google Scholar] [CrossRef]
- Wang, L.; Chen, G.; Wang, X.; Tang, W.K.S. Controllability of networked MIMO systems. Automatica 2016, 69, 405–409. [Google Scholar] [CrossRef]
- García, P.M.I. Analyzing controllability of neural networks. Wseas Trans. Circuits Syst. 2019, 18, 1–6. [Google Scholar]
- Biggs, N.L. Algebraic Graph Theory; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Li, C.P.; Deng, W.H. Remarks on fractional derivatives. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: San Diego, CA, USA, 1998. [Google Scholar]
- Zeidler, E. Nonlinear Functional Analysis and Its Applications I: Fixed-Point Theorems; Springer: New York, NY, USA, 1986. [Google Scholar]
- Govindaraj, V.; George, R.K. Controllability of fractional dynamical systems: A functional analytic approach. Math. Control Relat. Fields 2017, 7, 537. [Google Scholar] [CrossRef]
- Eǧecioǧlu, Ö.; Garsia, A.M. Lessons in Enumerative Combinatorics; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Xue, D.Y. FOTF Toolbox. MATLAB Central File Exchange. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/60874-fotf-toolbox (accessed on 2 October 2023).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).