
Results on Neutral Partial Integrodifferential Equations Using Monch-Krasnosel’Skii Fixed Point Theorem with Nonlocal Conditions

 ,
,  ,
,  and
and {kind=link}
Abstract
:1. Introduction
2. Results on Measure of Noncompactness
- (P1)
- A is a closed linear operator and densely defined on Banach space with graph norm , which is denoted as .
- (P2)
- be the set of all linear operators on X and is continuous for , there is a positive real-valued function b such that , , .
- (P3)
- For any , then and , .
- (i)
- and , where M, β are constants.
- (ii)
- is strongly continuous, and .
- (iii)
- , and let such that in both and and
- (1)
- if and only if S is relatively compact.
- (2)
- , where is the convex closed hull of S.
- (3)
- A MNC is called full, if if and only if S is relatively compact.
- (4)
- A MNC is monotone if the sets and of X are
- (5)
- A MNC is non-singular if for some and .
- (i)
- .
- (ii)
- where λ is real number.
- (iii)
- If is a decreasing bounded sequence of X with , then is a compact set in X.
- (iv)
- The map is Lipschitz continuous with a constant k such that for some bounded subset S of X.
- (a)
- is a strict contradiction of X into itself with constant k in .
- (b)
- for some .
- (i)
- is a nonempty set, for some , .
- (ii)
- for, .
- (iii)
- implies for any .
3. Important Results on Fixed Point Theorem
- (i)
- There exist and such that for all countable subsets , we have, which implies that C is relatively compact.
- (ii)
- The mapping is a strict contraction.
- (iii)
- , for some y in .
- (i)
- Let be a countable set with such that
- (ii)
- The mapping is a strict contraction.
- (iii)
- If , for some y in Then has a fixed point in M.
4. Results on Existence
- (S1)
- For some , we have
- (S2)
- The compact set and implies for all we have
- (H1)
- The mapping satisfied Caratheodary conditions, i.e., is continuous for all and is measurable, for each .
- (H2)
- There is and the mapping from intothen , and .
- (H3)
- The mapping is continuous and for some continuous function we havewhere is the increasing function.
- (H4)
- There exists the functions such that
- (H5)
- There is a constant for any we have
- (H6)
- For and there is then
- (H7)
5. Application I
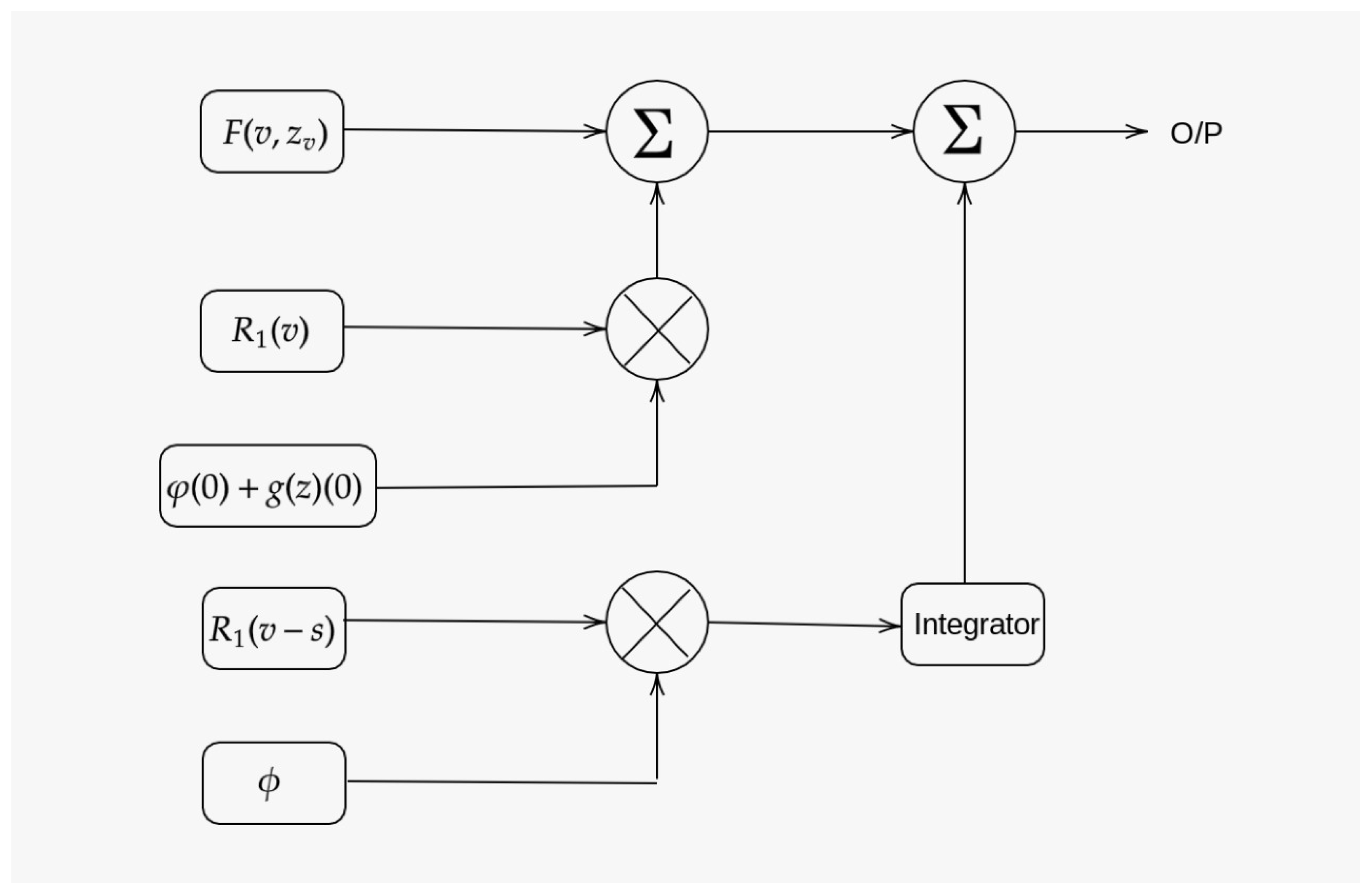
6. Application II—Filter System
- 1.
- Product modulator (PM)-1 accepts the inputs and at time , and produces the output .
- 2.
- PM-2 accepts the inputs and , and produces the output .
- 3.
- The integrator executes the integral of over the period v.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, C.; Grimmer, R. Semigroups and integral equations. J. Integral Equ. 1980, 2, 133–154. [Google Scholar]
- Grimmer, R.C. Resolvent operators for integral equations in a Banach space. Trans. Am. Math. Soc. 1982, 273, 333–349. [Google Scholar] [CrossRef]
- Balachandran, K.; Shija, G. Existence of Solutions of Nonlinear Abstract Neutral Integrodifferential Equations. Comput. Math. Appl. 2004, 48, 1403–1414. [Google Scholar] [CrossRef] [Green Version]
- Ezzinbi, K.; Ghnimi, S.; Taoudi, M.A. New Monch-Krasnosel’skii type fixed point theorems applied to solve neutral partial integrodifferential equations without compactness. J. Fixed Point Theory Appl. 2020, 22, 73. [Google Scholar] [CrossRef]
- Hernandez, E. Existence results for partial neutral functional integrodifferential equations with unbounded delay. J. Math. Anal. Appl. 2004, 292, 194–210. [Google Scholar] [CrossRef]
- Murugesu, R.; Suguna, S. Existence of solutions for neutral functional integrodifferential equations. Tamkang J. Math. 2010, 41, 117–128. [Google Scholar] [CrossRef]
- Pazy, A. Semigroups of Linear Operators and Applications to Partial Differential Equations; Springer: New York, NY, USA, 1983. [Google Scholar]
- Lizama, C.; Pozo, J.C. Existence of mild solutions for a semilinear integrodifferential equation with nonlocal initial conditions. Abstr. Appl. Anal. 2012, 2012, 1–15. [Google Scholar] [CrossRef]
- Ezzinbi, K.; Ghnimi, S. Existence and Regularity for Some Partial Neutral Functional Integrodifferential Equations with Nondense Domain. Bull. Malays. Math. Sci. Soc. 2019, 43, 1–21. [Google Scholar] [CrossRef]
- Banas, J.; Goebel, K. Measure of Noncompactness in Banach Spaces; Marcel Dekker: New York, NY, USA, 1980. [Google Scholar]
- Chlebowicz, A.; Taoudi, M.A. Measures of Weak Noncompactness and Fixed points. In Advances in Nonlinear Analysis via the Concept of Measures of Noncompactness; Springer: Singapore, 2017; pp. 247–296. [Google Scholar]
- Sun, J.; Zhang, X. The fixed point theorem of convex-power condensing operator and applications to abstract semilinear evolution equations. Acta Math. Sin. 2005, 48, 339–446. [Google Scholar]
- Henrniquez, H.R.; Poblete, V.; Pozo, J.C. Mild solutions of non-autonomous second order problems with nonlocal initial conditions. J. Math. Anal. Appl. 2014, 412, 1064–1083. [Google Scholar] [CrossRef]
- Liu, L.; Guo, F.; Wu, C.; Wu, Y. Existence theorems of global solutions for nonlinear Volterra type integral equations in Banach spaces. J. Math. Anal. Appl. 2005, 309, 638–649. [Google Scholar] [CrossRef] [Green Version]
- Daher, S.D. On a fixed point principle of Sadovskii. Nonlinear Anal. 1978, 2, 643–645. [Google Scholar] [CrossRef]
- Kamenskii, M.; Obukhovskii, V.; Zekka, P. Condensing Multivated Maps and Semilinear Differential Inclusions in Banach Spaces; De Gryter: Berlin, NY, USA, 2001. [Google Scholar]
- Chandra, A.; Chattopadhyay, S. Design of hardware efficient FIR filter: A review of the state-of-the-art approaches. Eng. Sci. Technol. Int. J. 2016, 19, 212–226. [Google Scholar] [CrossRef] [Green Version]
- Zahoor, S.; Naseem, S. Design and implementation of an efficient FIR digital filter. Cogent Eng. 2017, 4, 1323373. [Google Scholar] [CrossRef]
- Beyrouthy, T.; Fesquet, L. An event-driven FIR filter design and implementation. In Proceedings of the 22nd IEEE International Symposium on Rapid System Prototyping, Karlsruhe, Germany, 24–27 May 2011; pp. 59–65. [Google Scholar]
- Tabassum, F.; Amin, M.R.; Islam, M.I. Comparison of FIR and IIR Filter Bank in Reconstruction of Speech Signal. Int. J. Comput. Sci. Inf. Secur. 2016, 14, 864–872. [Google Scholar]
- Stavrou, V.N.; Tsoulos, I.G.; Mastorakis, N.E. Transformations for FIR and IIR Filters Design. Symmetry 2021, 33, 533. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravichandran, C.; Munusamy, K.; Nisar, K.S.; Valliammal, N. Results on Neutral Partial Integrodifferential Equations Using Monch-Krasnosel’Skii Fixed Point Theorem with Nonlocal Conditions. Fractal Fract. 2022, 6, 75. https://doi.org/10.3390/fractalfract6020075
Ravichandran C, Munusamy K, Nisar KS, Valliammal N. Results on Neutral Partial Integrodifferential Equations Using Monch-Krasnosel’Skii Fixed Point Theorem with Nonlocal Conditions. Fractal and Fractional. 2022; 6(2):75. https://doi.org/10.3390/fractalfract6020075
Chicago/Turabian StyleRavichandran, Chokkalingam, Kasilingam Munusamy, Kottakkaran Sooppy Nisar, and Natarajan Valliammal. 2022. "Results on Neutral Partial Integrodifferential Equations Using Monch-Krasnosel’Skii Fixed Point Theorem with Nonlocal Conditions" Fractal and Fractional 6, no. 2: 75. https://doi.org/10.3390/fractalfract6020075
APA StyleRavichandran, C., Munusamy, K., Nisar, K. S., & Valliammal, N. (2022). Results on Neutral Partial Integrodifferential Equations Using Monch-Krasnosel’Skii Fixed Point Theorem with Nonlocal Conditions. Fractal and Fractional, 6(2), 75. https://doi.org/10.3390/fractalfract6020075