
Discretization, Bifurcation, and Control for a Class of Predator-Prey Interactions


Abstract
:1. Introduction
- The existence and uniqueness of biologically feasible equilibria and their stability analysis are discussed.
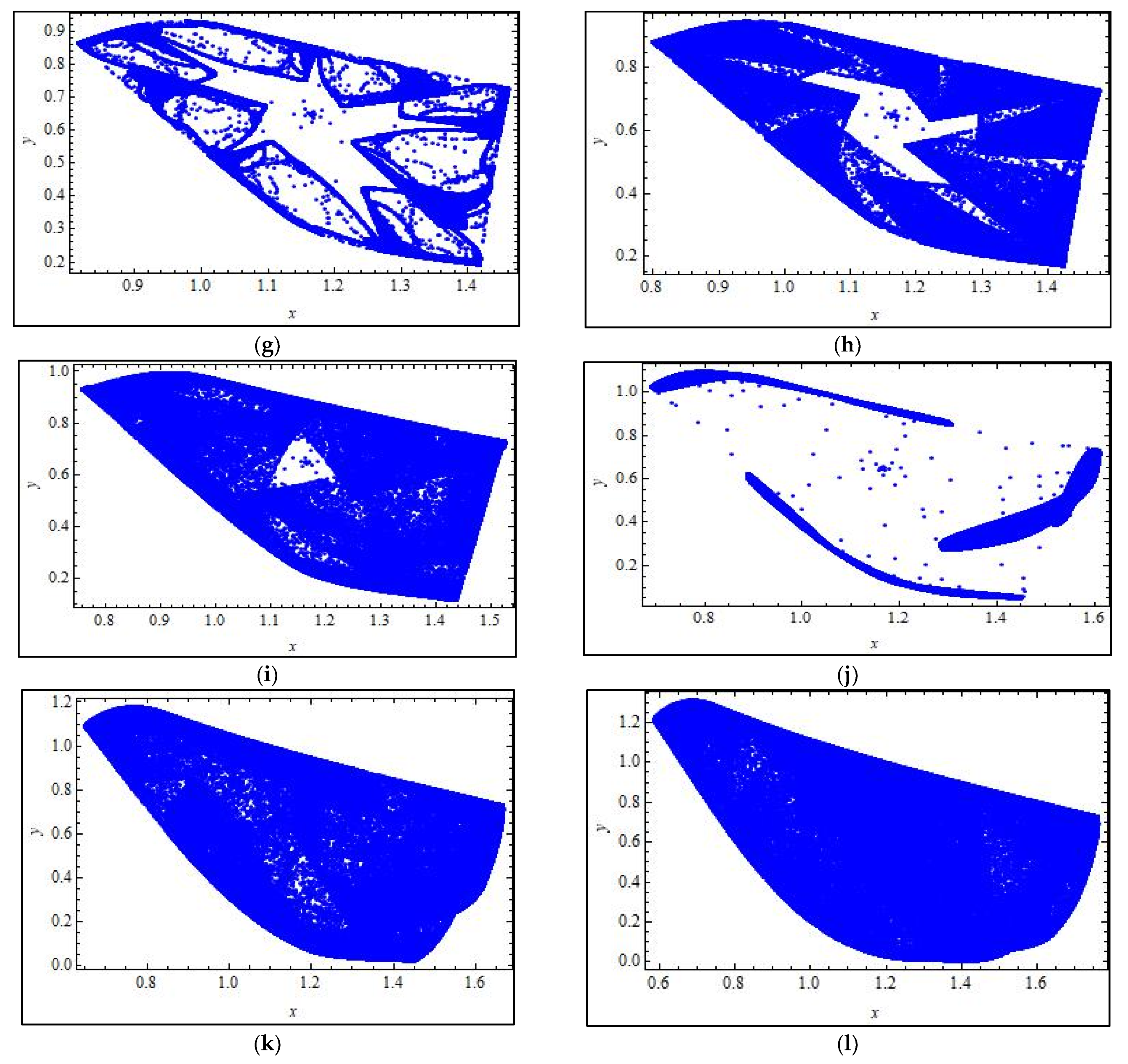
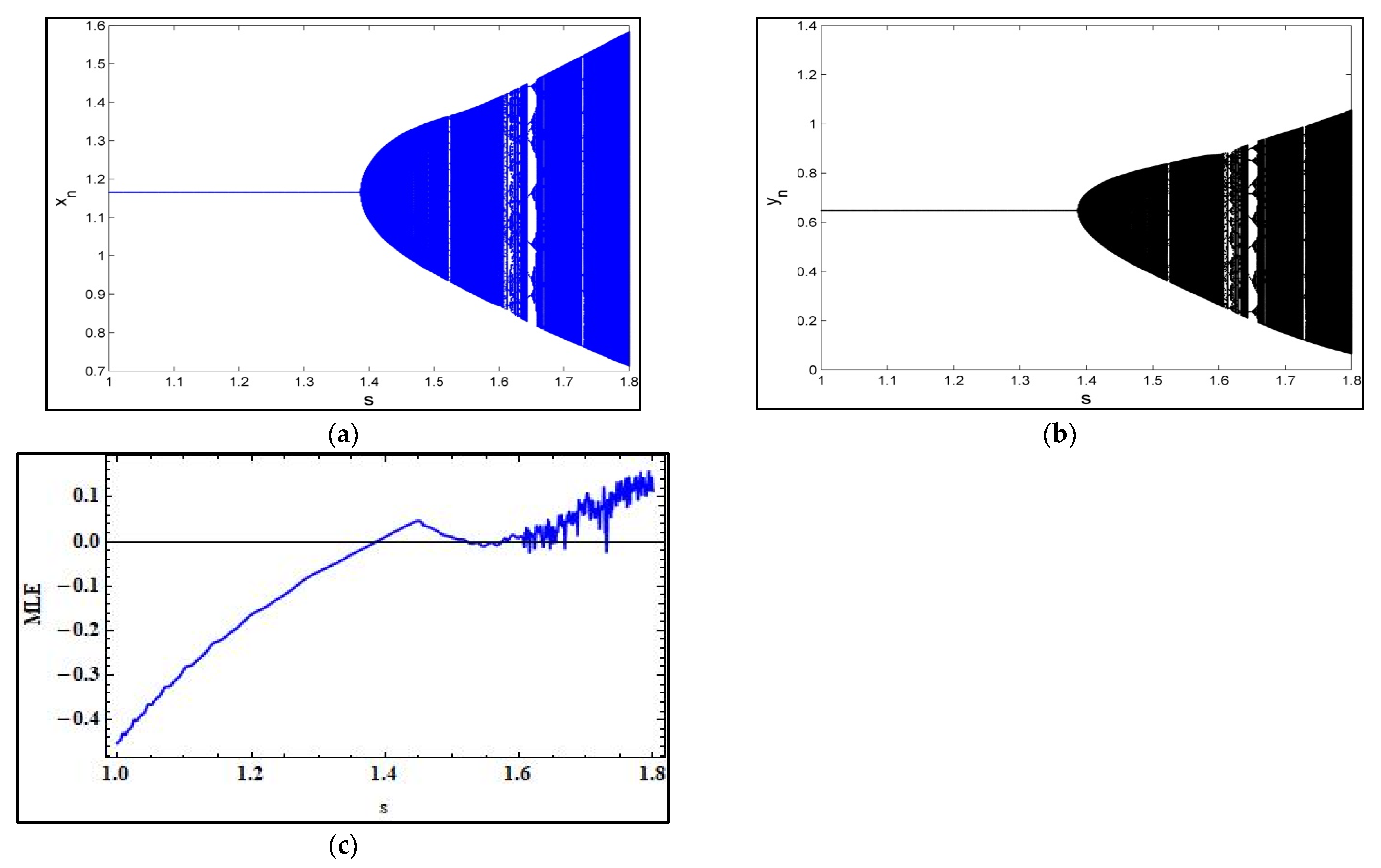
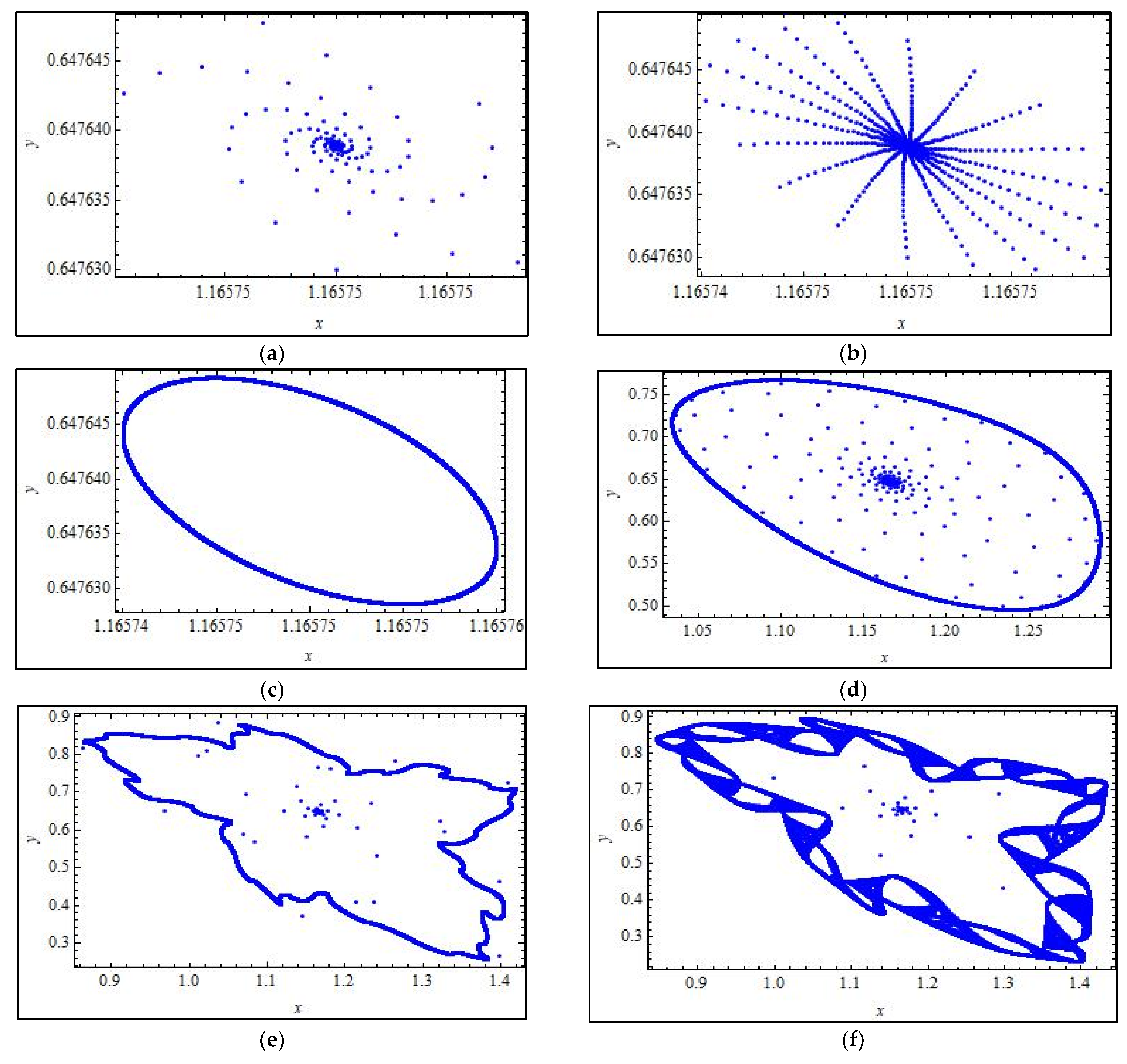
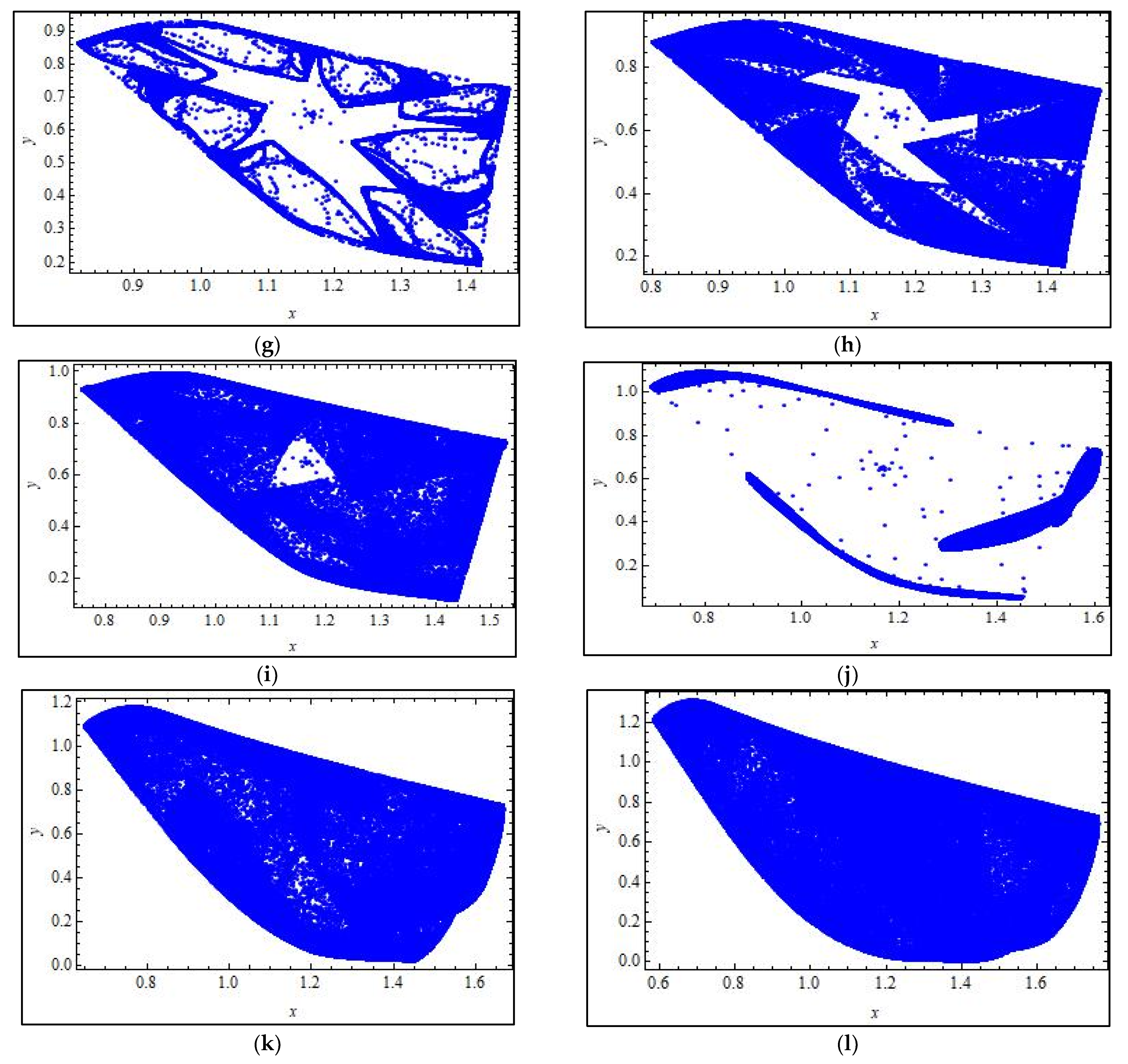
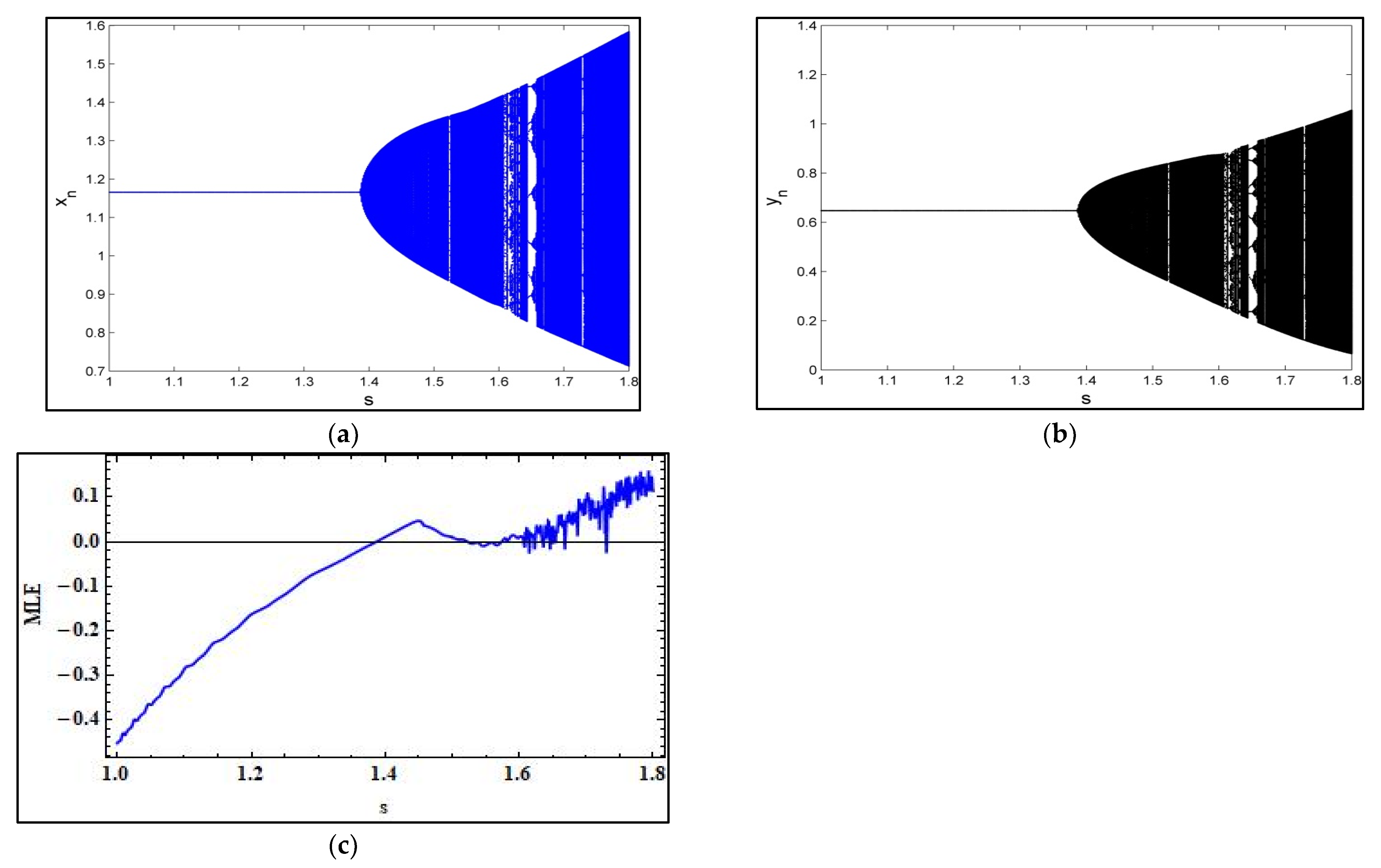
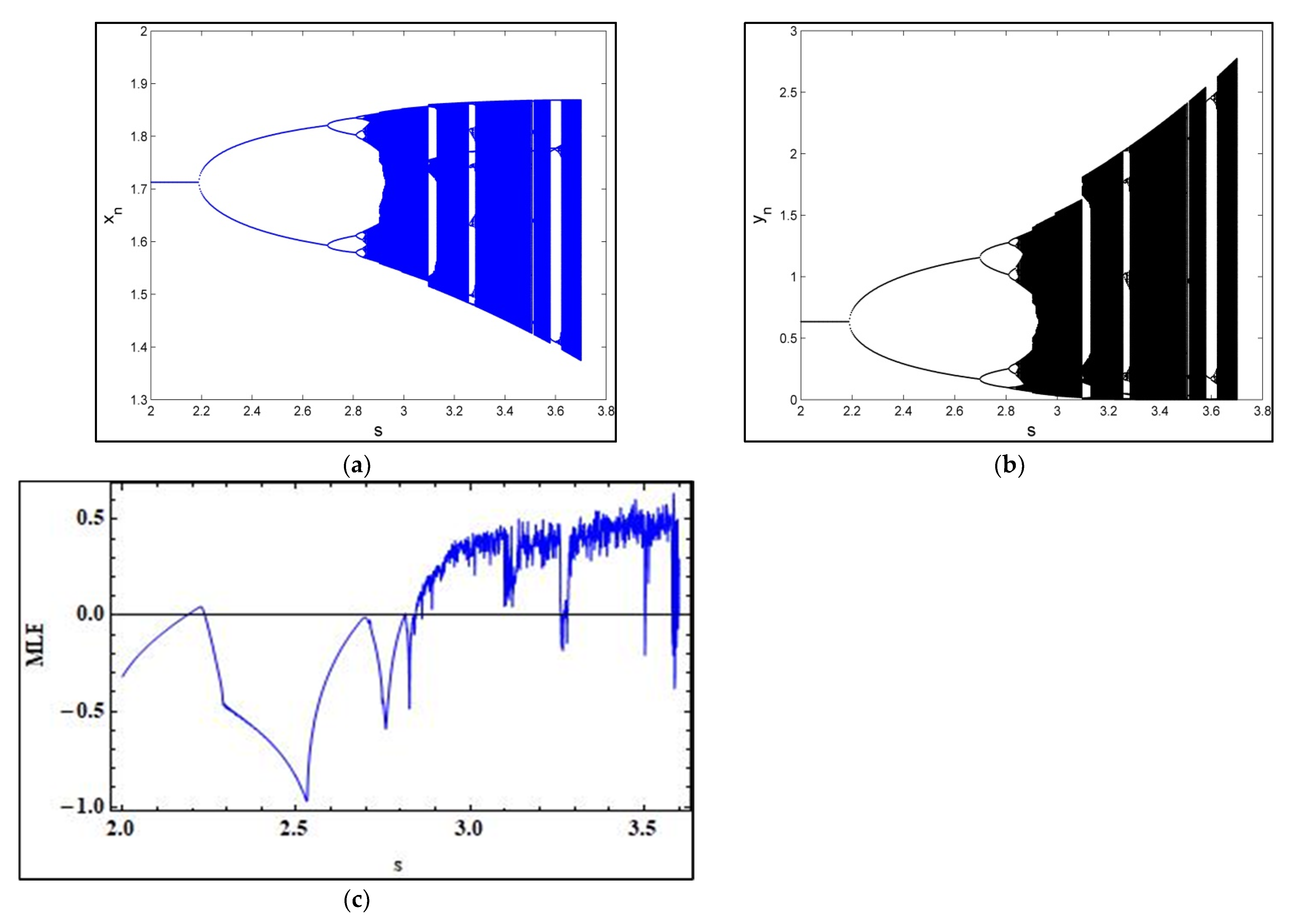
- Our findings indicate that model (4) undergoes periodic doubling as well as a Neimark-Sacker bifurcation at its unique positive equilibrium.
- The direction and existance criteria for both types of bifurcation are examined under interior equilibrium.
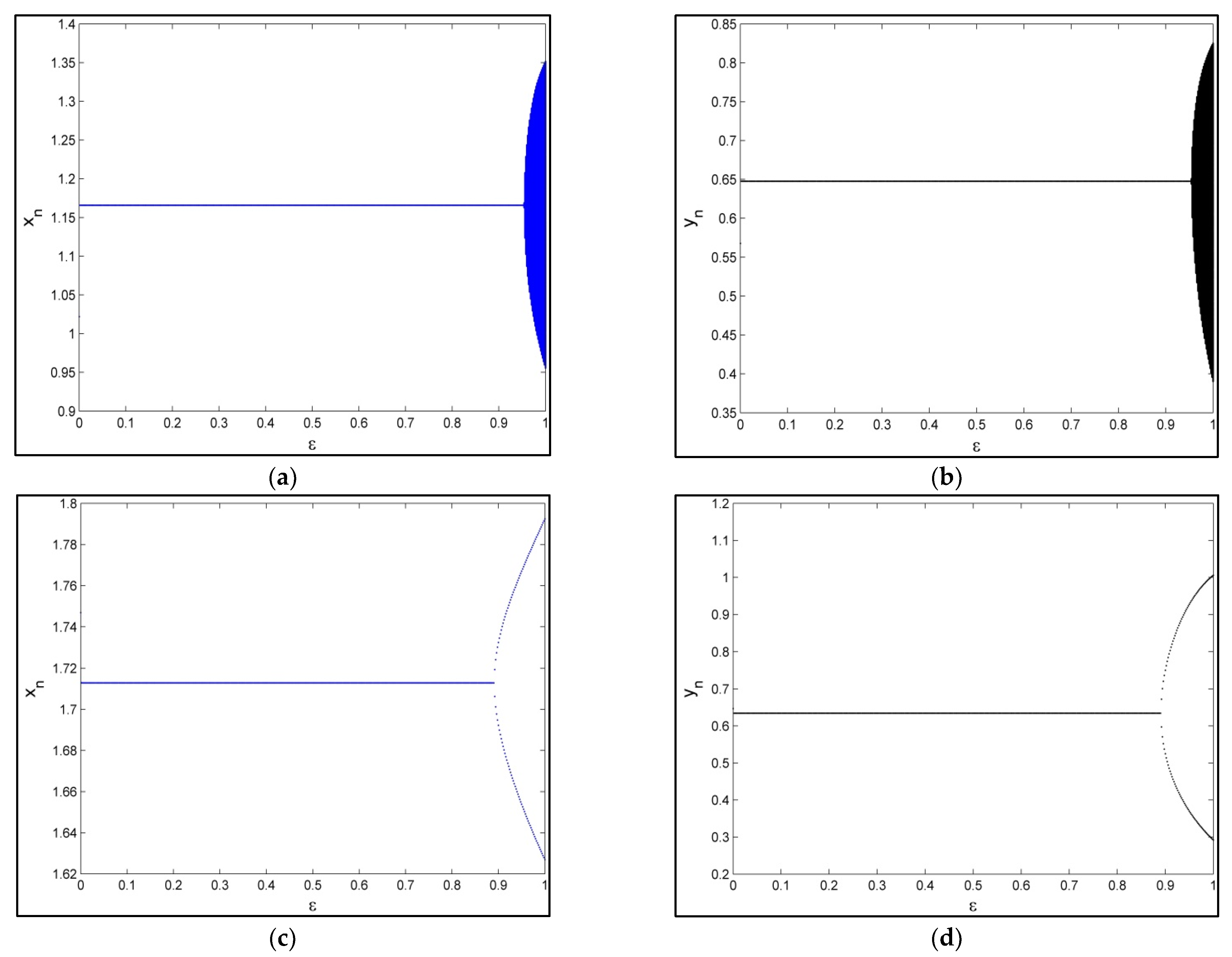
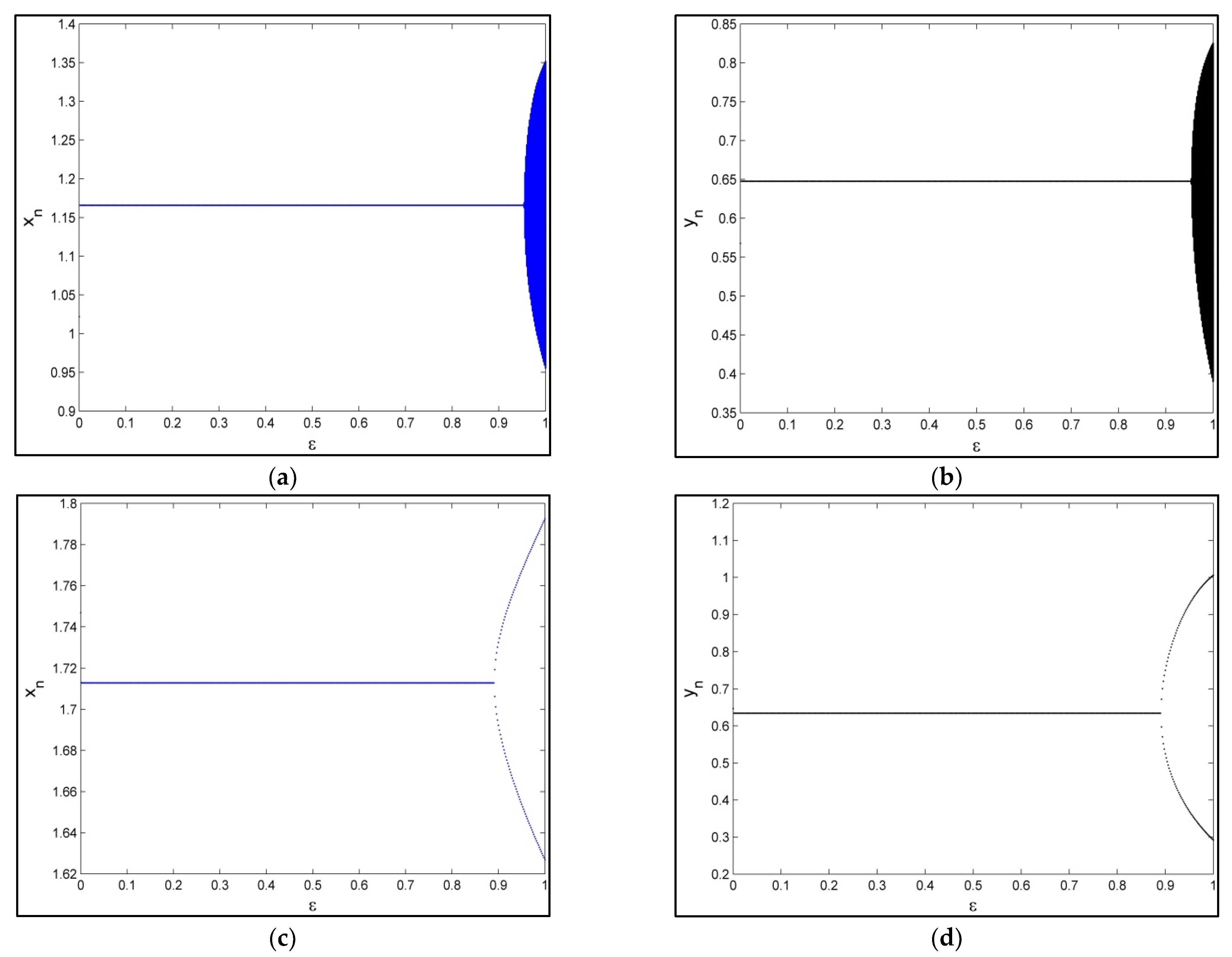
- A hybrid control strategy is applied to control the chaos in model (4).
2. Preliminaries
- is said to be stable if for any, there existssuch that for allwithwe havefor all. Otherwise, the fixed pointis unstable.
- is said to be attractive ifexists, such thatimplies.
- is asymptotically stable if it is both stable and attractive. If in (2),, thenis said to be globally asymptotically stable.
- If, thenis asymptotically stable.
- If, thenis unstable.
3. Boundedness
4. Existence of a Positive Fixed Point and Local Stability
- (i)
- & and ;
- (ii)
- & or ( and ) ;
- (iii)
- & and ;
- (iv)
- & and ;
- (v)
- andare complex andand and.
- (i)
- The interior equilibriumis stable iff:and
- (ii)
- The positive fixed pointis a saddle point if and only ifand
- (iii)
- The interior fixed pointis non-hyperbolic if and only ifor
5. Bifurcation Analysis
6. Chaos Control
7. Fractal Dimension
8. Numerical Simulation
9. Concluding Remarks
10. Future Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Chen, B.S.; Chen, J.J. Bifurcation and chaotic behavior of a discrete singular biological economic system. Appl. Math. Comput. 2012, 219, 2371–2386. [Google Scholar] [CrossRef]
- Ghaziani, R.K.; Govaerts, W.; Sonck, C. Resonance and bifurcation in a discrete-time predator-prey system with Holling functional response. Nonlinear Anal. RWA 2012, 13, 1451–1465. [Google Scholar] [CrossRef] [Green Version]
- Jana, D. Chaotic dynamics of a discrete predator-prey system with prey refuge. Appl. Math. Comput. 2013, 224, 848–865. [Google Scholar] [CrossRef]
- Misra, O.P.; Sinha, P.; Singh, C. Stability and bifurcation analysis of a prey-predator model with age based predation. Appl. Math. Model. 2013, 37, 6519–6529. [Google Scholar] [CrossRef]
- Zhang, G.D.; Shen, Y.; Chen, B.S. Bifurcation analysis in a discrete differential-algebraic predator-prey system. Appl. Math. Model. 2014, 38, 4835–4848. [Google Scholar] [CrossRef]
- Hu, D.P.; Cao, H.J. Bifurcation and chaos in a discrete-time predator-prey system of Holling and Leslie type. Commun. Nonlinear Sci. Numer. Simulat. 2015, 22, 702–715. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.Y. Further investigations into the stability and bifurcation of a discrete predator-prey model. J. Math. Anal. Appl. 2015, 422, 920–939. [Google Scholar] [CrossRef]
- Murdoch, W.; Briggs, C.; Nisbet, R. Consumer-Resource Dynamics; Princeton University Press: New York, NY, USA, 2003. [Google Scholar]
- Holling, C.S. The functional response of predator to prey density and its role in mimicry and population regulation. Mem. Entomol. Soc. Can. 1965, 97, 5–60. [Google Scholar] [CrossRef] [Green Version]
- Rosenzweig, M.L.; MacArthur, R.H. Graphical representation and stability conditions of predator-prey interactions. Am. Nat. 1963, 97, 209–223. [Google Scholar] [CrossRef]
- Freedman, H.I.; Mathsen, R.M. Persistence in predator-prey systems with ratio-dependent predator influence. Bull. Math. Biol. 1993, 55, 817–827. [Google Scholar] [CrossRef]
- Hastings, A. Multiple limit cycles in predator-prey models. J. Math. Biol. 1981, 11, 51–63. [Google Scholar] [CrossRef]
- Lindstrom, T. Qualitative analysis of a predator-prey systems with limit cycles. J. Math. Biol. 1993, 31, 541–561. [Google Scholar] [CrossRef]
- Jing, Z.J.; Yang, J. Bifurcation and chaos in discrete-time predator-prey system. Chaos Solitons Fractals 2006, 27, 259–277. [Google Scholar] [CrossRef]
- Liu, X.; Xiao, D. Complex dynamic behaviors of a discrete-time predator-prey system. Chaos Solitons Fractals 2007, 32, 80–94. [Google Scholar] [CrossRef]
- Lopez-Ruiz, R.; Fournier-Prunaret, D. Indirect Allee effect, bistability and chaotic oscillations in a predator-prey discrete model of logistic type. Chaos Solitons Fractals 2005, 24, 85–101. [Google Scholar] [CrossRef]
- Neubert, M.G.; Kot, M. The subcritical collapse of predator populations in discrete-time predator-prey models. Math. Biosci. 1992, 110, 45–66. [Google Scholar] [CrossRef]
- Shabbir, M.S.; Din, Q.; Ahmad, K.; Tassaddiq, A.; Soori, A.H.; Khan, M.A. Stability, bifurcation and chaos control of a novel discrete-time model involving Allee effect and cannibalism. Adv. Differ. Equ. 2020, 2020, 379. [Google Scholar] [CrossRef]
- Din, Q.; Shabbir, M.S.; Khan, M.A.; Ahmad, K. Bifurcation analysis and chaos control for a plant-herbivore model with weak predator functional response. J. Biol. Dyn. 2019, 13, 481–501. [Google Scholar] [CrossRef] [Green Version]
- Shabbir, M.S.; Din, Q.; Safeer, M.; Khan, M.A.; Ahmad, K.A. A dynamically consistent nonstandard finite difference scheme for a predator-prey model. Adv. Differ. Equ. 2019, 2019, 381. [Google Scholar] [CrossRef] [Green Version]
- Samaddar, S.; Dhar, M.; Bhattacharya, P. Effect of fear on prey-predator dynamics: Exploring the role of prey refuge and additional food. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 63129. [Google Scholar] [CrossRef]
- Anacleto, M.; Vidal, C. Dynamics of a delayed predator-prey model with Allee effect and Holling type II functional response. Math. Methods Appl. Sci. 2020, 43, 5708–5728. [Google Scholar] [CrossRef]
- Tang, B. Dynamics for a fractional-order predator-prey model with group defense. Sci. Rep. 2020, 10, 4906. [Google Scholar] [CrossRef]
- Sarwardi, S.; Haque, M.M.; Hossain, S. Analysis of Bogdanov-Takens bifurcations in a spatiotemporal harvested-predator and prey system with Beddington–DeAngelis-type response function. Nonlinear Dyn. 2020, 100, 1755–1778. [Google Scholar] [CrossRef]
- Din, Q. Complexity and chaos control in a discrete-time prey-predator model. Commun. Nonlinear. Sci. Numer. Simulat. 2017, 49, 113–134. [Google Scholar] [CrossRef]
- Shabbir, M.S.; Din, Q.; Alabdan, R.; Tassaddiq, A.; Ahmad, K. Dynamical complexity in a class of novel discrete-time predator-prey interaction with cannibalism. IEEE Access 2020, 8, 100226–100240. [Google Scholar] [CrossRef]
- Selvam, A.G.; Vianny, D.A.; Jacob, S.B. Dynamical behaviour of discrete time prey-predator model with Holling type III functional response. Cikitusi J. Multidiscip. Res. 2019, 6, 75–81. [Google Scholar]
- Jiangang, Z.; Tian, D.; Yandong, C.; Shuang, Q.; Wenju, D.; Hongwei, L. Stability and bifurcation analysis of a discrete predator-prey model with Holling type III functional response. J. Nonlinear Sci. Appl. 2016, 2016, 6228–6243. [Google Scholar]
- Elettreby, M.F.; Nabil, T.; Khawagi, A. Stability and bifurcation analysis of a discrete predator-prey model with mixed Holling interaction. Comput. Modeling Eng. Sci. 2020, 122, 907–921. [Google Scholar] [CrossRef]
- Murray, J.D. Mathematical Biology, 2nd ed.; Springer: Berlin, Germany, 1993. [Google Scholar]
- He, Z.; Lai, X. Bifurcation and chaotic behavior of a discrete-time predator-prey system. Nonlinear Anal. Real World Appl. 2011, 12, 403–417. [Google Scholar] [CrossRef]
- Saber, N. Elaydi, Discrete Chaos; Chapman & Hall/CRC: Boca Raton, FL, USA, 2007. [Google Scholar]
- Chen, Y.U. Controlling and anti-controlling Hopf bifurcations in discrete maps using polynomial functions. Chaos Solitons Fractals 2005, 26, 1231–1248. [Google Scholar] [CrossRef]
- ELabbasy, E.M.; Agiza, H.N.; Metwally, H.E.L.; Elsadany, A.A. Bifurcation analysis, chaos and control in the Burgers mapping. Int. J. Nonlinear Sci. 2007, 4, 171–185. [Google Scholar]
- Tassaddiq, A.; Shabbir, M.S.; Din, Q.; Ahmad, K. A ratio-dependent nonlinear predator-prey model with certain dynamical results. IEEE Access 2020, 8, 195074–195088. [Google Scholar] [CrossRef]
- Din, Q.; Saleem, N.; Shabbir, M.S. A class of discrete predator-prey interaction with bifurcation analysis and chaos control. Math. Model. Nat. Phenom. 2020, 15, 1–27. [Google Scholar] [CrossRef]
- Din, Q.; Shabbir, M.S. A Cubic autocatalator chemical reaction model with limit cycle analysis and consistency preserving discretization. MATCH Commun. Math. Comput. Chem. 2022, 87, 441–462. [Google Scholar] [CrossRef]
- Cartwright, J.H.E. Nonlinear stiffness Lyapunov exponents and attractor dimension. Phys. Lett. A 1999, 264, 298–304. [Google Scholar] [CrossRef] [Green Version]
- Kaplan, J.L.; Yorke, J.A. Preturbulence: A regime observed in a fluid flow model of Lorenz. Commun. Math. Phys. 1979, 67, 93–108. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2.85 | |||
| 2.90 | |||
| 3.0 | |||
| 3.1 | |||
| 3.2 | |||
| 3.3 | |||
| 3.4 | |||
| 3.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tassaddiq, A.; Shabbir, M.S.; Din, Q.; Naaz, H. Discretization, Bifurcation, and Control for a Class of Predator-Prey Interactions. Fractal Fract. 2022, 6, 31. https://doi.org/10.3390/fractalfract6010031
Tassaddiq A, Shabbir MS, Din Q, Naaz H. Discretization, Bifurcation, and Control for a Class of Predator-Prey Interactions. Fractal and Fractional. 2022; 6(1):31. https://doi.org/10.3390/fractalfract6010031
Chicago/Turabian StyleTassaddiq, Asifa, Muhammad Sajjad Shabbir, Qamar Din, and Humera Naaz. 2022. "Discretization, Bifurcation, and Control for a Class of Predator-Prey Interactions" Fractal and Fractional 6, no. 1: 31. https://doi.org/10.3390/fractalfract6010031
APA StyleTassaddiq, A., Shabbir, M. S., Din, Q., & Naaz, H. (2022). Discretization, Bifurcation, and Control for a Class of Predator-Prey Interactions. Fractal and Fractional, 6(1), 31. https://doi.org/10.3390/fractalfract6010031