1. Introduction
The Takagi–Sugeno (T-S) fuzzy model [
1] is composed of certain If-Then fuzzy rules, in which each consequent part is in the form of the state-space representation that is a linear differential equation. Though the overall T-S fuzzy model is a nonlinear model (meaning a nonlinear differential equation), techniques for controller design based on linear models such as linear feedback control can still be applied, if a controller design based on the T-S fuzzy model is developed using the concept of the so-called parallel distributed compensation (PDC). This is one of the main reasons why there have been significant advances in the study of the stability analysis and controller synthesis based on the T-S fuzzy model since the beginning of the 1990s. In particular, with the help of some advanced software packages such as the third-party MATLAB toolbox, the design parameters in the PDC controller can be numerically obtained by solving certain linear matrix inequalities (LMIs) that provide sufficient conditions for system stability in the sense of Lyapunov stability.
On the other hand, the T-S fuzzy model, like other models, in most cases, is comprised of approximate mathematical expressions for the purpose of designing a controller for the system. This means that there is a discrepancy between a real system and its T-S fuzzy model. Including the discrepancy, this paper uses a term called uncertainty to express the unmodeled dynamics such as external/internal disturbance and parameter perturbations beyond the T-S fuzzy model. If the uncertainty is small enough, i.e., the T-S fuzzy model matches the real system perfectly well, the control performance of the controller based on the T-S fuzzy model will be as good as designed; however, in the case when the magnitude of the uncertainty is relatively large, the controller may not work well when it is applied to the real system, and in the worst case, the closed-loop system may become unstable. Therefore, in order to guarantee and improve the control performance, the uncertainty must be taken into consideration in the T-S fuzzy model.
Though the uncertainty is referred to by different names in different contexts, how to deal with it has been a very typical subject in control systems. Among the existing approaches,
control [
2,
3,
4,
5,
6] is an effective approach that keeps the ratio of the influence from the uncertainty on the real system below some prescribed indexes. Though a wide range of related works was reported, as a result, the influence from the uncertainty becomes larger accordingly if the magnitude of the uncertainty is larger, even if the ratio is kept the same. Another way to handle the uncertainty in the T-S fuzzy model is to utilize the capability of the fuzzy approximator capable of uniformly approximating unknown nonlinearities [
7,
8,
9,
10], in which related parameters are tuned by adaptive laws [
2]. However, the parameters lying in the fuzzy approximators are tuned on the basis, not of the improvement of the approximateness, but of the system stability. In other words, if the approximateness is not guaranteed, the control performance cannot be as good as expected, and even the overall control system becomes unstable in the worst case.
Assuming the uncertainty is norm-bounded with certain structures in the T-S fuzzy model, some works involved certain known matrices defining the norm-bounded uncertainty in certain LMIs, which guarantees the system stability [
11,
12,
13,
14]. However, it is not easy to estimate the norm-bounded matrices because the mathematical model of the real system is unavailable in most cases; thus, the magnitudes of the norm-bounded matrices are often set large to safely cover the uncertainty, which results in conservative stability conditions. On the other hand, viewing the uncertainty as an unknown input, there are existing approaches of designing state observers decoupling the influence of the unknown input in the field of fault diagnosis [
15,
16,
17]. However, when further designing a controller based on the model with unknown input, in fact, the approach used in the design of the state observers cannot be applied straightforwardly to the design of controller.
Uncertainty observer-based control provides a promising approach to handle system uncertainty and improve robustness [
18,
19,
20,
21]. In this framework, a baseline controller is first designed under the assumption that the uncertainty is not considered, and then, a compensation part is added to the baseline controller in order to counteract the influence of the uncertainty that is estimated by an observer. However, all the proposed observers are designed on the assumption that the uncertainty only lies in the control matrices and must not be time-dependent, which clearly limits its applications.
While it is difficult to estimate the uncertainty itself particularly when it is highly oscillating, the paper makes an effort to extract as much information from the uncertainty as possible; then, the information is utilized in the controller design. Consequently, the influence of the uncertainty will be reduced accordingly, which leads to a better control performance. In the T-S fuzzy model considered in this paper, the uncertainty is thought to influence the system behavior through the state and the control input. While the former part of the uncertainty is assuming norm-boundedness, this paper focuses attention on the latter part of the uncertainty, because it is linked to the control input directly, which implies that any information available about the uncertainty can be used directly, as well. Concretely, the latter part of the uncertainty is virtually divided further into a constant part and a time-varying part, and an observer of the constant part is designed. As a result, the observer is able to catch the trajectory of the latter part of the uncertainty. Following the observer design, a controller using the information of the trajectory from the observer is proposed, in which the conditions guaranteeing the system stability are arranged in the form of LMIs. Finally, simulation results are provided to illustrate the effectiveness of the approach proposed in this paper.
2. T-S Fuzzy Model and Partial Disturbance Observer
Assume that a nonlinear system can be represented by the following T-S fuzzy model [
1]:
where
is a variable in the antecedent that is available;
, a fuzzy term corresponding to the
i-th rule;
, the state vector;
, the input vector;
, the output vector;
,
,
, some compatible matrices;
, uncertainty including modeling error, external disturbance, unmodeled dynamics and parameter perturbations.
The overall T-S fuzzy model is of the following form accordingly:
where
,
At first glance,
in (
1) seems redundant due to the fact that it can be obtained directly from
. However, when it comes to the fuzzy inference,
in (
2) cannot be obtained straightforwardly from
, which leads to:
Therefore, we assume that in this paper, in order to focus our attention on simple control approaches rather than complex formula manipulation. In addition, if as in most cases of the T-S fuzzy models, then is no longer needed due to the fact that , which leads to .
As for the uncertainty
, we assume it influences the system behavior through the state and the control input:
where
denotes a partial influence of the uncertainty on the state
, while
represents a further partial influence of the uncertainty on the control input
.
Paying attention to
, which influences the system through the control matrix
the same as the control input
, it is reasonable to consider that it would be able to design a controller that is based on a regular control input
with an extra element such as
to counteract the influence of
completely if
were available. While it is impossible to catch the real value of
as a whole, it is still desirable to employ some information of
, even partially, to counteract its influence on the system as much as possible. On the other hand, some existing works have shown that we are able to estimate
under the condition of
[
22,
23], which means that
must be a constant, or precisely, not a time-dependent function. Though such a condition is evidently strict from the point of view of dynamic control systems, in fact, as pointed out by Wu and Han [
23], the condition can, not theoretically, but practically, be extended to cases such as the piecewise-constant case and the slowly time-varying case (
). However, when it comes to a sharply time-varying case, it is clear that the condition cannot be tolerated anymore.
On the basis of the aforementioned observation, we virtually divide
into a constant part
and a time-vary part
:
Whether
is either slowly time-varying or sharply time-varying, we assume it, along with
, is norm-bounded as follows [
11]:
where
and
are known constant matrices with compatible dimensions and
is an unknown nonlinear time-varying matrix function satisfying:
Regarding the virtually constant part
in (
4), we use the following observer to estimate it:
where
is the estimate of the constant part
;
, the internal state vector of the observer;
, the observer gain to be determined. The overall observer is of the following form accordingly:
Defining the estimation error between
and
as:
we have:
where the facts that
and
are used. It is worth noting that
is not an assumption in this paper, because
is considered as the constant part in (
4).
Before starting the controller design, the following lemma is first provided, which will be used in the control system stability analysis [
24].
Lemma 1. Given matrices A, M, E and with appropriate dimensions, let be of the appropriate dimensions and satisfy . Then, the following holds:
- (a)
- (b)
If for some constant such that , then:or:
From here, unless confusion arises, arguments such as t and will be omitted just for notational convenience. An asterisk (∗) for inline expressions denotes the transpose of the terms on its left-hand side; for matrix expressions, it denotes the transpose of its symmetric block-entry.
3. Controller Design
Based on the partial disturbance observer, the following PDC controller is proposed.
where
is the control gain to be determined. Compared to the regular PDC controller, there is an extra term
in order to counteract the disturbance whenever possible. The overall PDC controller is of the following form accordingly:
Substituting (
15) into (
2), the closed-loop control system becomes:
Combining (
A5) with (
A7), we have the following augmented system containing the state and estimation error of the partial disturbance:
where:
The stability of the above augmented closed-loop system is investigated based on the Lyapunov stability theory. Let us consider the following quadratic Lyapunov function candidate:
where:
,
.
Taking the time derivative of
V, we have:
Substituting the following inequalities into (
21),
where:
and:
where (a) of Lemma 1 is used, we have:
Letting:
where
is a prescribed constant, from (
25), we have:
where
is the maximum eigenvalue of
P,
. Considering the relation in (
5) and
, whatever the dimensions of
and
may be,
must be a vertical vector. As a result,
is a scalar.
From (
27), we have:
which implies that after sufficient time has elapsed,
will tend to zero, i.e.,
Considering the relation of
, where
is the minimum eigenvalue of
P, from (
29), we have:
Therefore, the problem left is how to maintain the inequality (
26). By the Schur complement, (
26) is equivalent to the following:
Substituting (
18) and (
23) into (
31), we have:
where
,
Considering that
,
,
F and
, which is hidden in
F, are parameters to be determined,
is nonlinear. Though, except
, the other blocks are all linear, (
32) cannot be treated as an LMI issue to obtain the parameters satisfying the inequality. However, bearing in mind that a necessary condition to hold the inequality is the leading principal minor
, here in this paper, we first consider obtaining
such that:
where
. It is evident that by the Schur complement,
holds if (
34) is satisfied. By solving LMIs in (
34), we have:
Once
is known, (
32) becomes LMIs. In other words, viewing
,
F as the decision variables, solving (
32) along with LMI (
20), the observer gain
L can be obtained as follows.
To sum up all results above, the following theorem is provided.
Theorem 1. Consider a nonlinear system represented by the T-S fuzzy model (2) with the uncertainty subject to (3)–(6), the partial uncertainty observer (7) and controller (15) in which the observer gain L and the control gain () are obtained by the following two steps. For a prescribed scalar , if there exists symmetric matrices , matrices F and with appropriate dimensions obtained progressively: - Step 1
solving LMIs (34) to obtain , then by (35), - Step 2
solving LMIs (20) and (32) to obtain and F, then L by (36), where is known by Step 1,
then the augmented system containing the state x and the estimation error of the partial disturbance defined in (9) will remain stable, and the state will converge to the region defined in (30). Regarding this theorem, we give the following remarks.
Remark 1. It follows from (30) that it is better to set a larger η and a smaller in order to make smaller. However, a larger η leads to LMIs (34) tending to be more difficult to satisfy, while a smaller causes the risk that is no longer covered by , as shown in (5). There is a trade-off between the parameter setting and the convergence. Remark 2. is not involved in the LMIs (32) directly in Step 2, which implies that it is enough as long as as required by the LMI (20). Therefore, from (36), we observe that a smaller leads to a larger observer gain L. In order to adjust the magnitude of ,where is set manually. Remark 3. The theorem is based on the condition that the state x is available. A similar design is provided in Appendix A in the case that the state is unavailable. 4. Simulation
Consider the following altered Van der Pol oscillator [
25]:
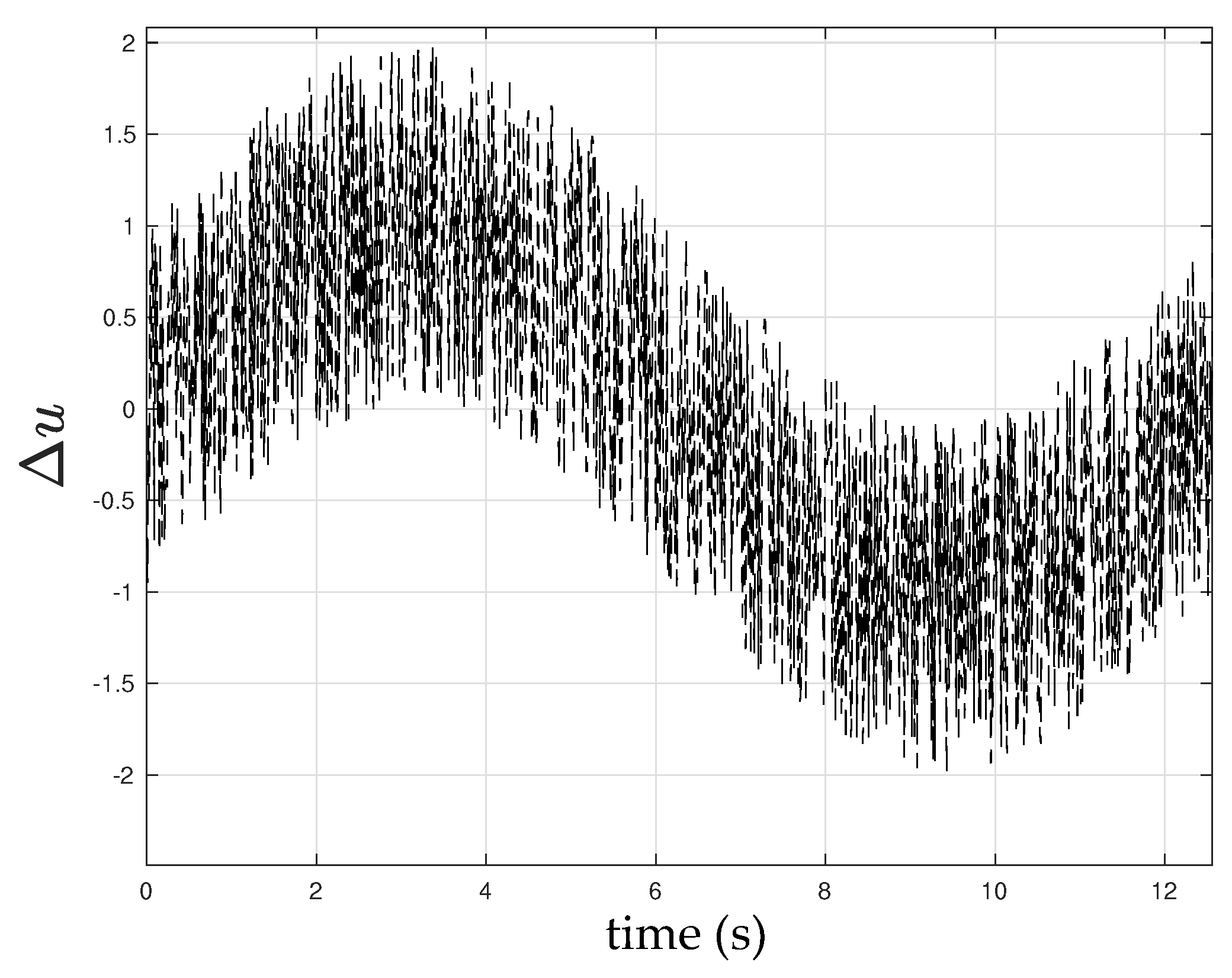
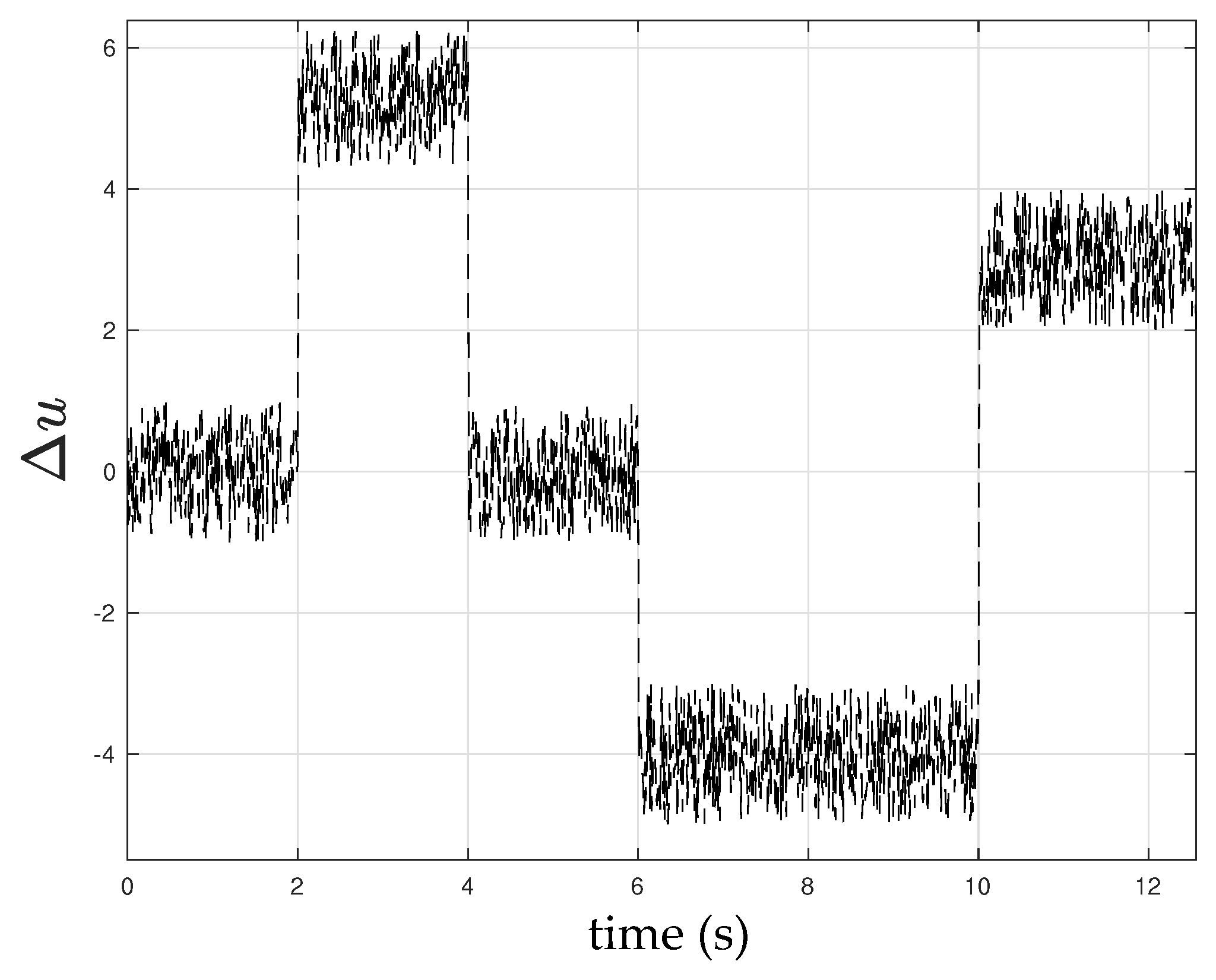
where the uncertainty in (
3) is given as:
and
, in which
is considered in two cases that are depicted in
Figure 1 and
Figure 2.
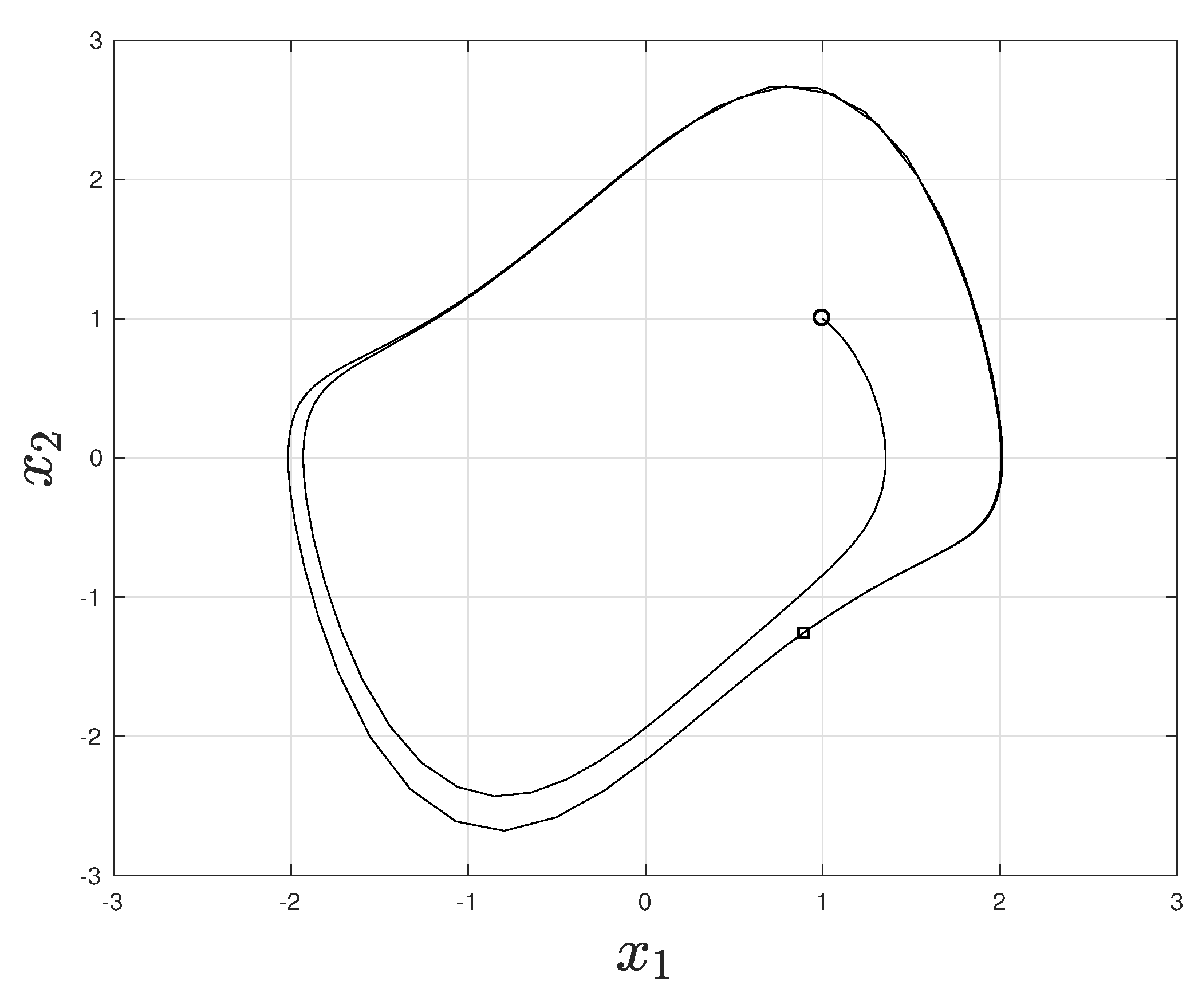
Without control and uncertainty, i.e.,
and
, the
phase plane is shown in
Figure 3, where the circle is the initial point and the square is the end point. It is clear that the unforced system is unstable.
The above nonlinear system can be represented by the following two-rule T-S fuzzy model:
where
,
,
,
,
As for
in (
5), we set
,
,
and
. Following Step 1 in Theorem 1, we have
,
by solving LMIs by (
35). Then, following Step 2, we have
by solving LMIs (
20) and (
32), where
in (
37) is set to be 100 in order to get a larger observer gain. It is obvious that
L will be
if we set
For the purposes of comparison, we recall the regular PDC controller based on the T-S fuzzy model (
2) where
[
26]:
The control gain can be obtained by
, where
are subject to the following LMIs:
Solving the above LMIs, we have
,
for the regular PDC controller in (
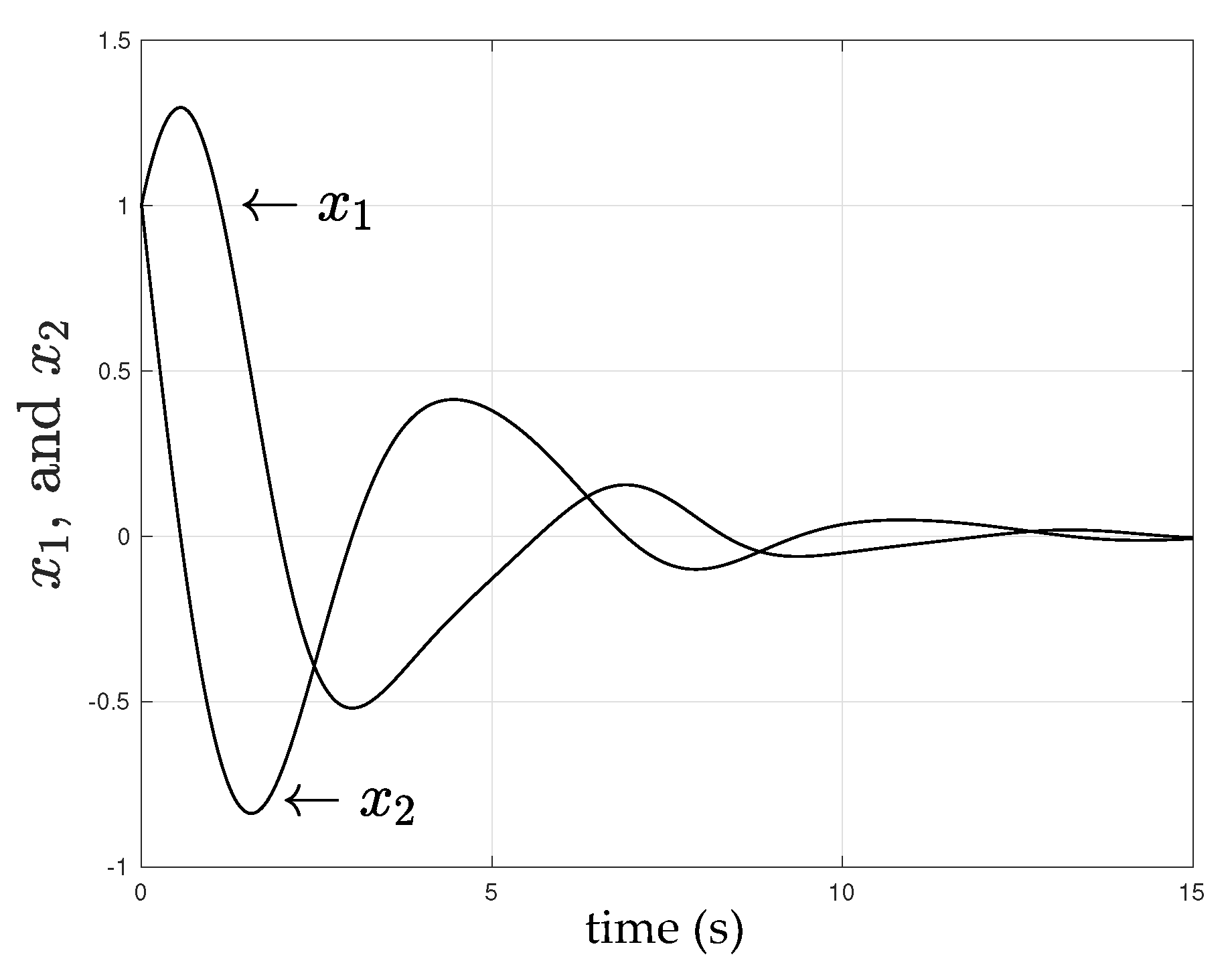
41). The control performance of the regular controller is shown in
Figure 4, where the uncertainty is not considered, i.e.,
, where the initial state is set to be
. It is clear that the regular controller is able to stabilize the unstable system when the uncertainty is not considered.
However, when the uncertainty in
Figure 1 is applied to the system, as shown in
Figure 5, the regular controller no longer stabilizes the system. On the contrary, with the uncertainty observer (
A4), the proposed controller (
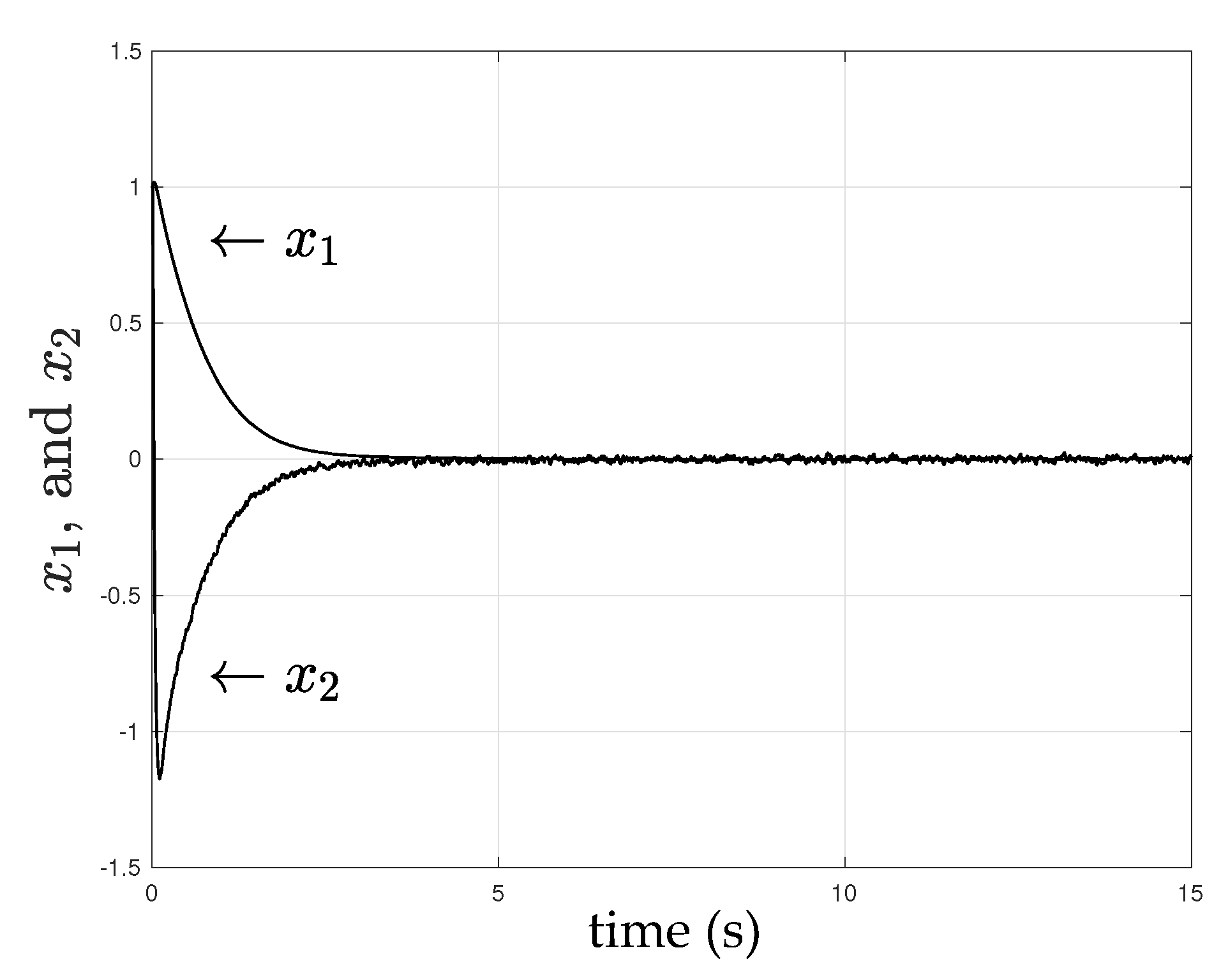
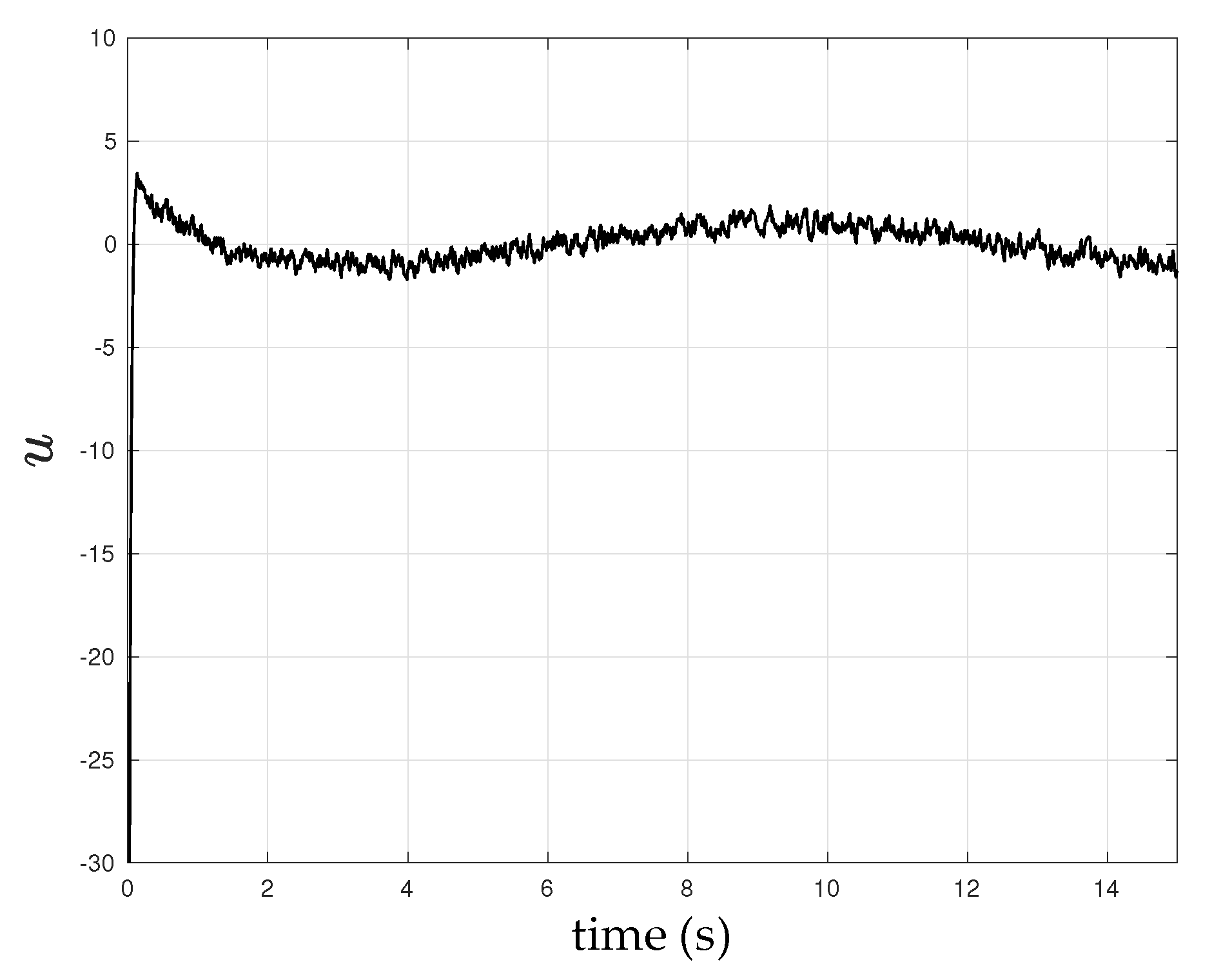
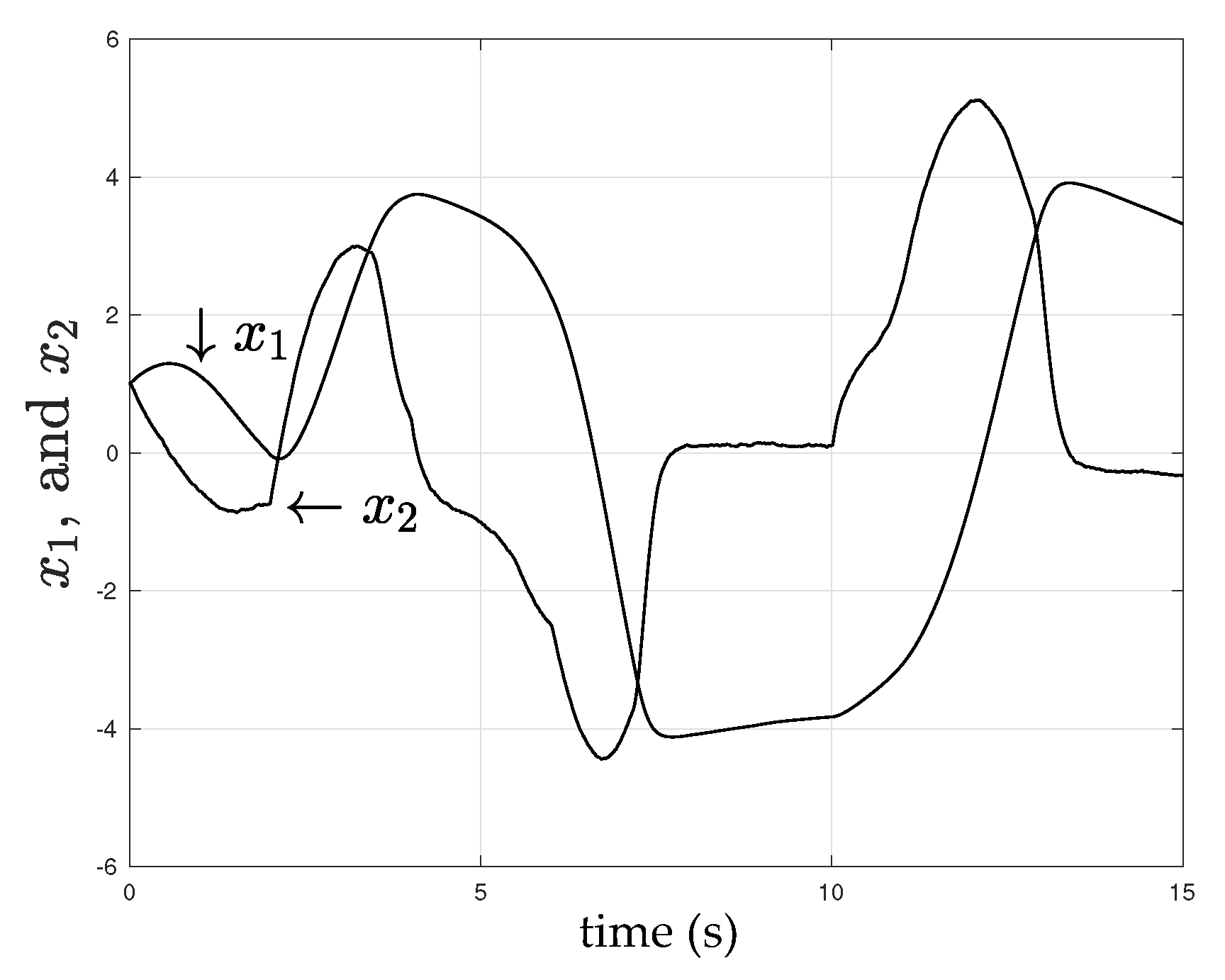
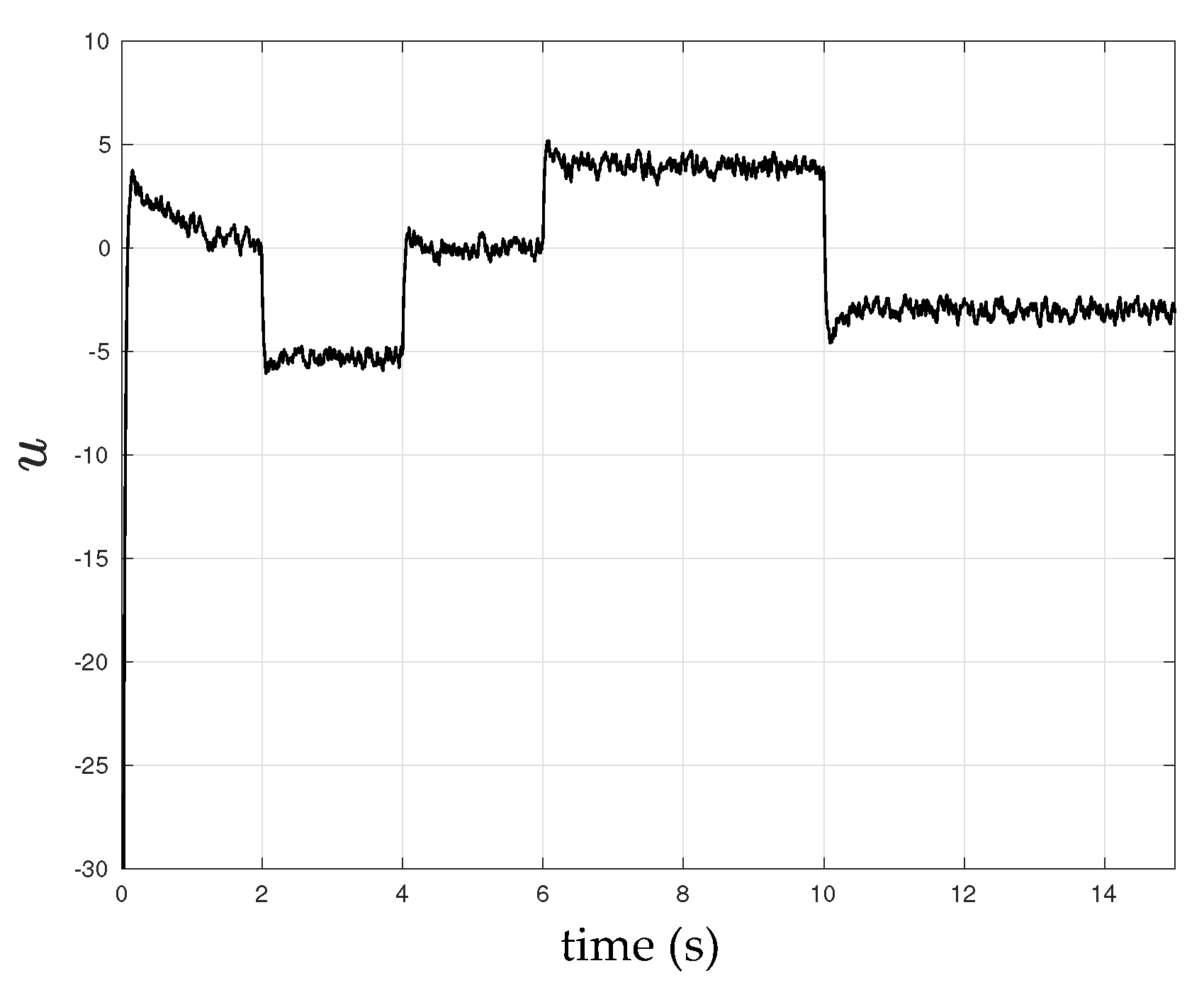
15) can stabilize the system effectively under the same circumstances.
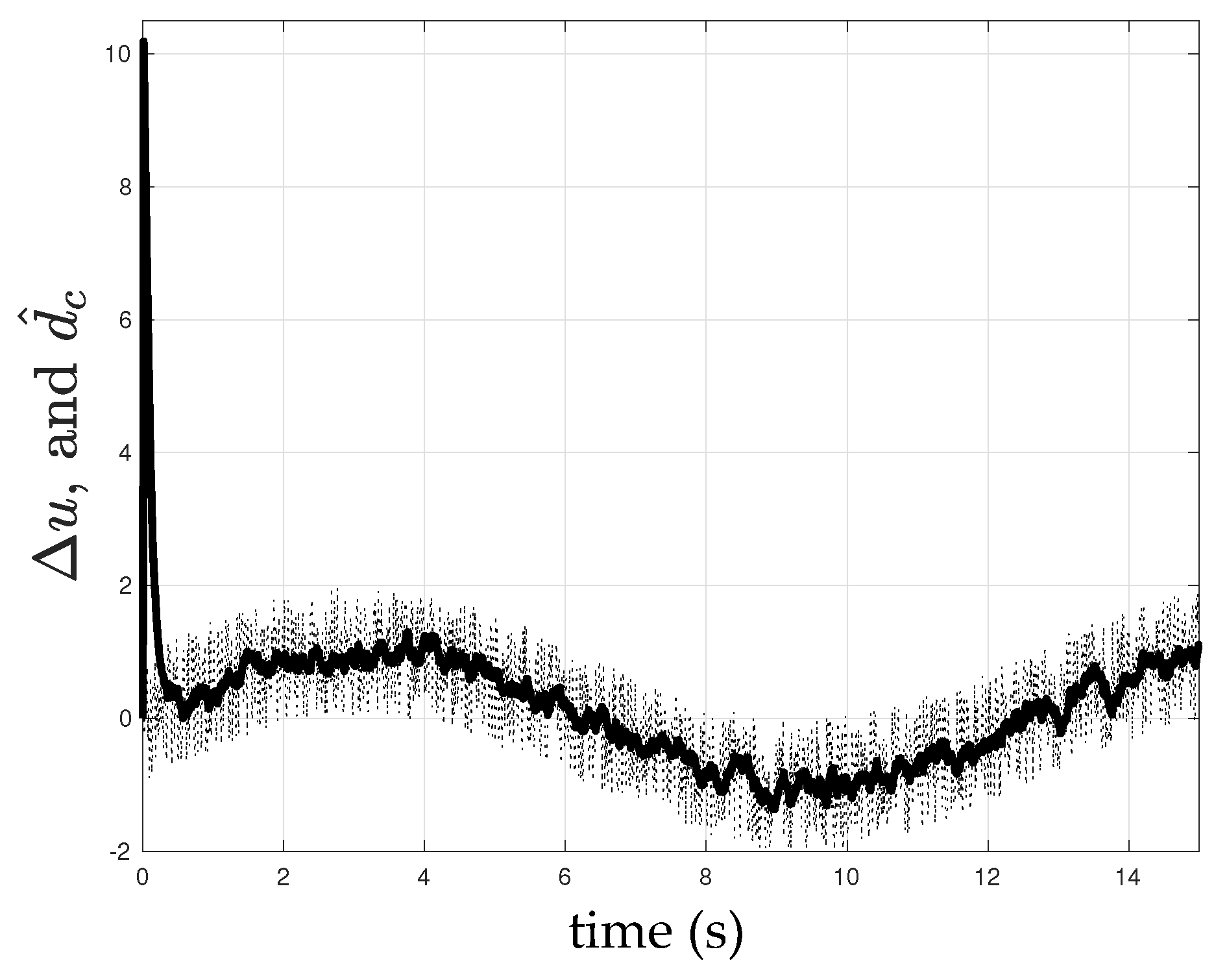
Figure 6 and
Figure 7 depict the behaviors of state and control input, respectively. At the same time, as shown in
Figure 8, the observer (
A4) is able to catch the trajectory (bold line) of the uncertainty
.
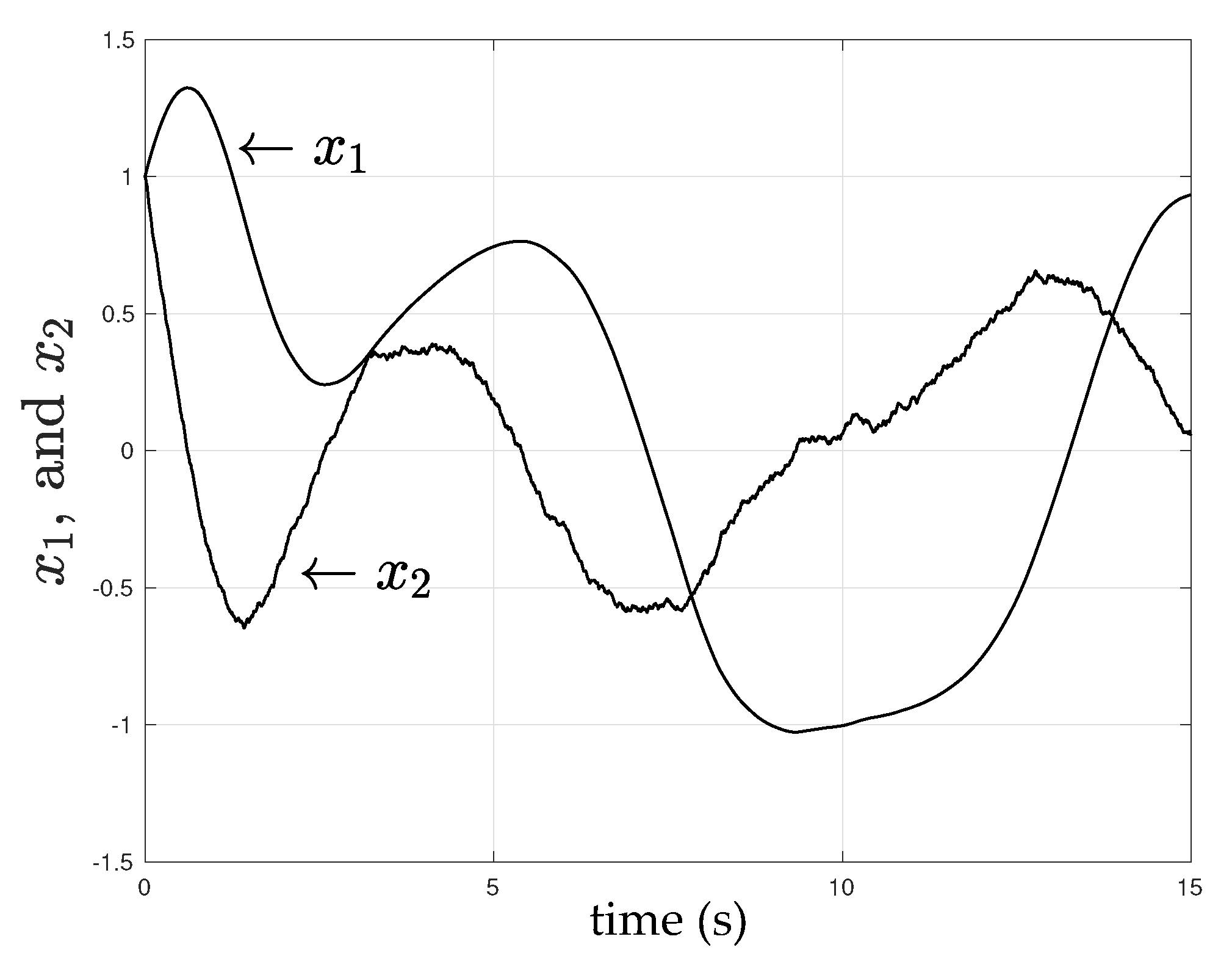
When it comes to the uncertainty in
Figure 2, as shown in
Figure 9, the regular controller (
41) once again is unable to stabilize the system. However, the proposed controller is very effective at handling the same situation. The behaviors of the state and control input are depicted in
Figure 10 and
Figure 11, respectively, while the behavior of the uncertainty observer (
A4) is depicted in
Figure 12.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
