
Innovative Hybrid UAV Design, Development, and Manufacture for Forest Preservation and Acoustic Surveillance
 , ,
, ,  ,
,
Abstract
1. Introduction
2. Materials and Methods
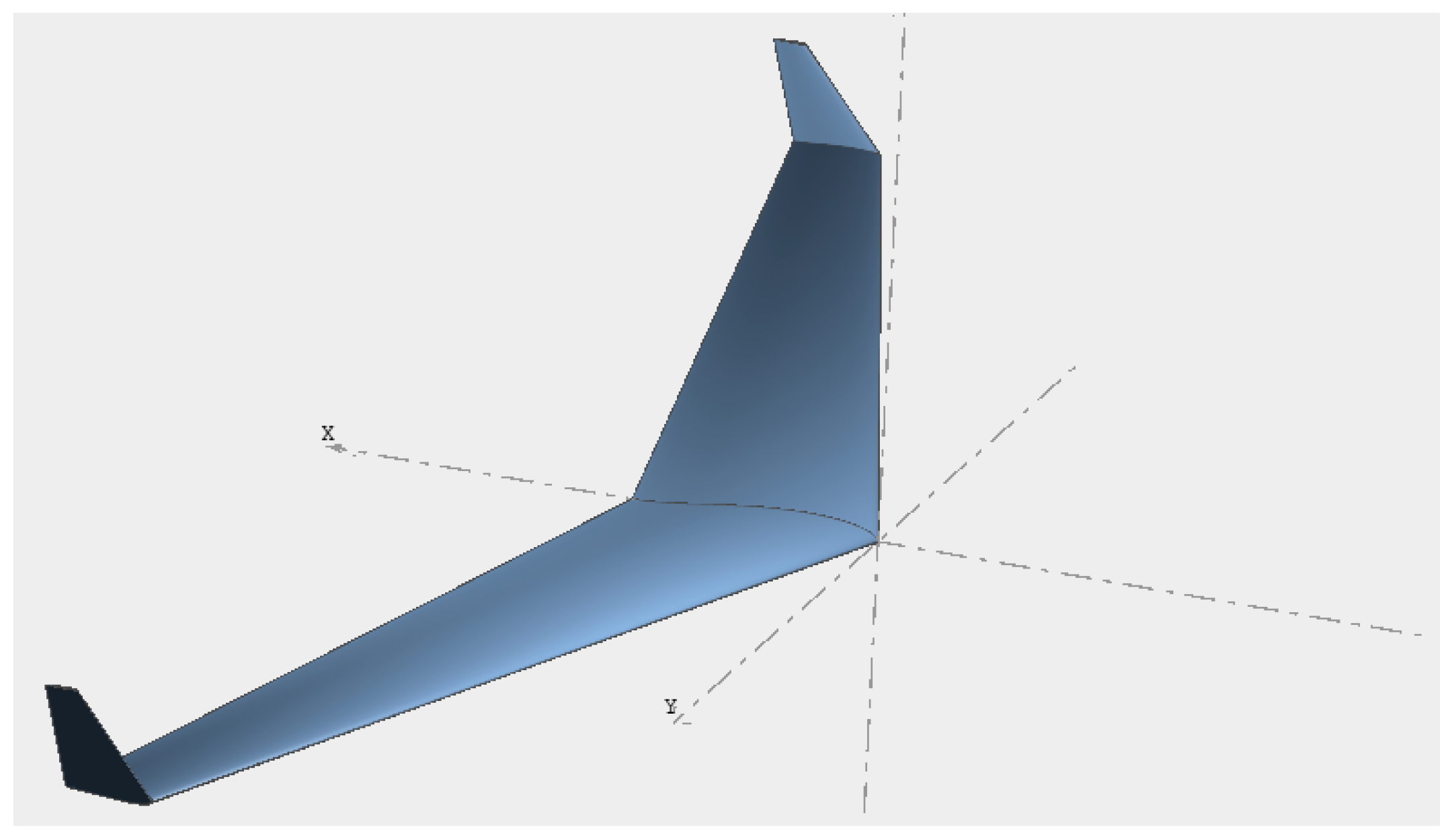
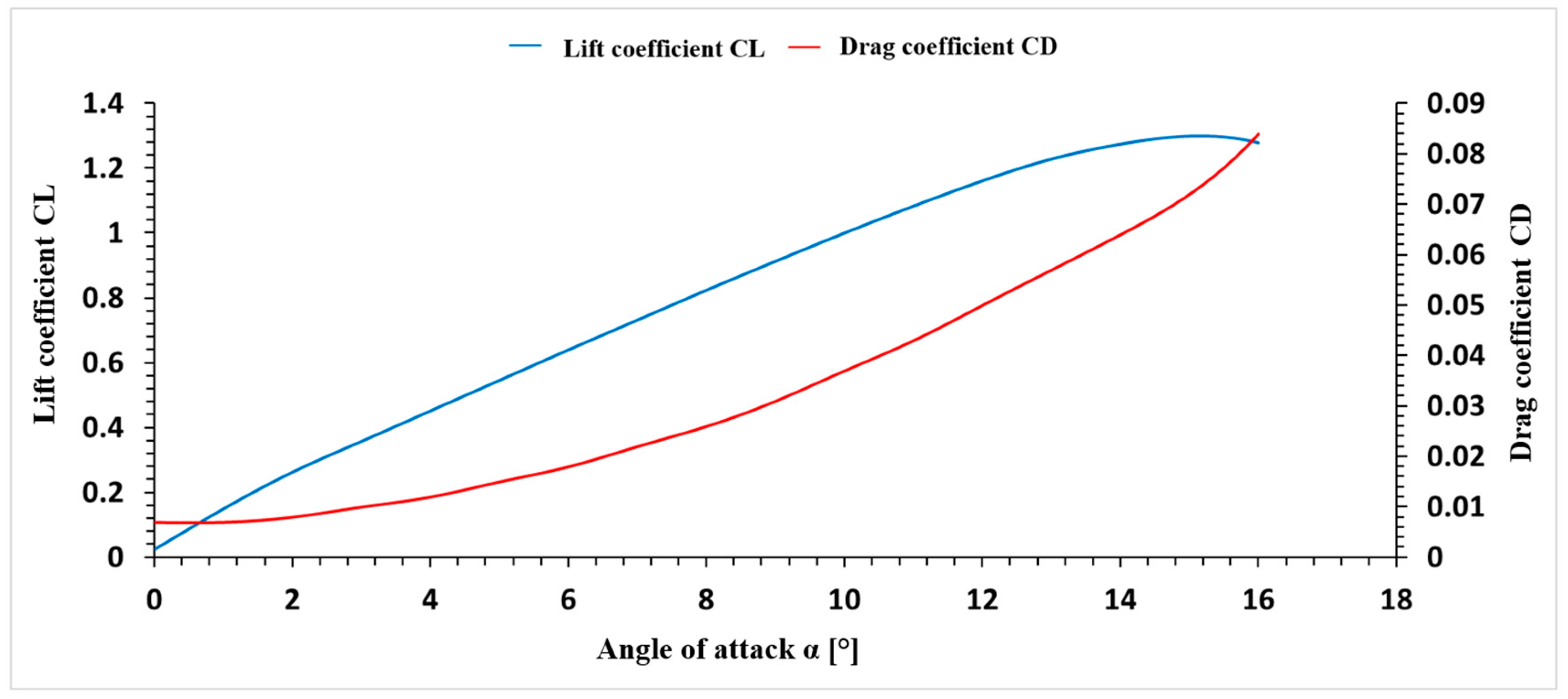
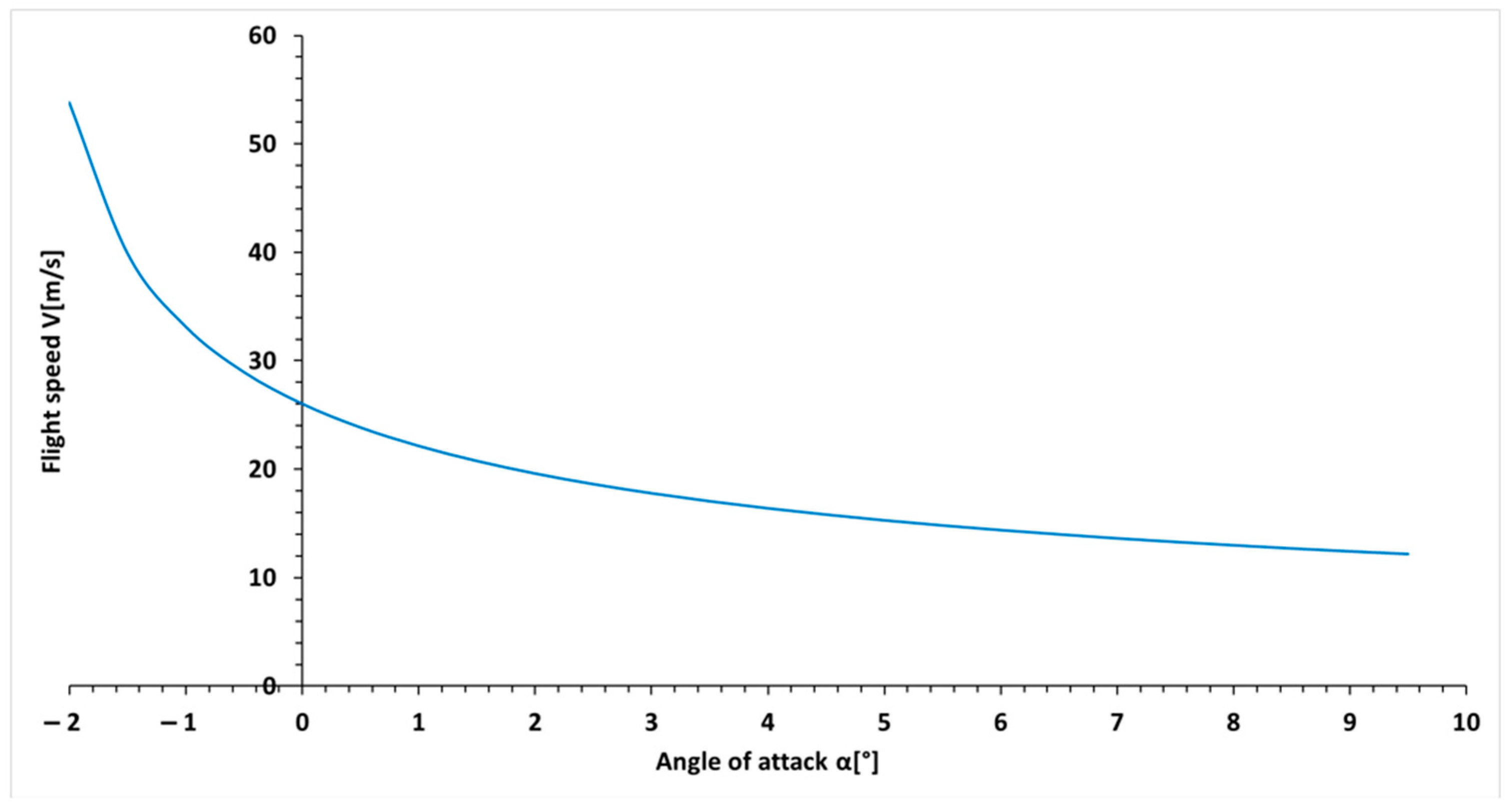
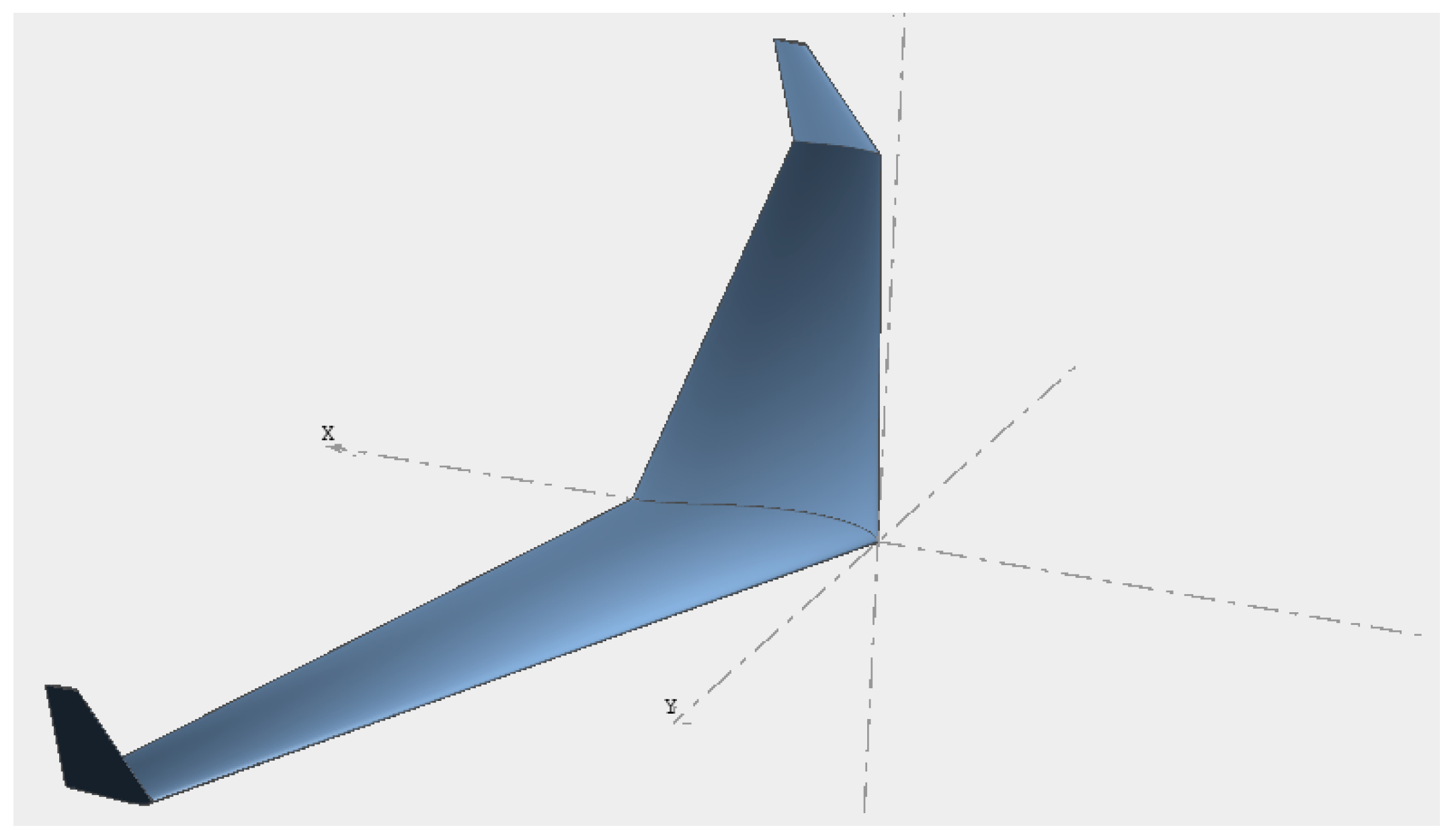
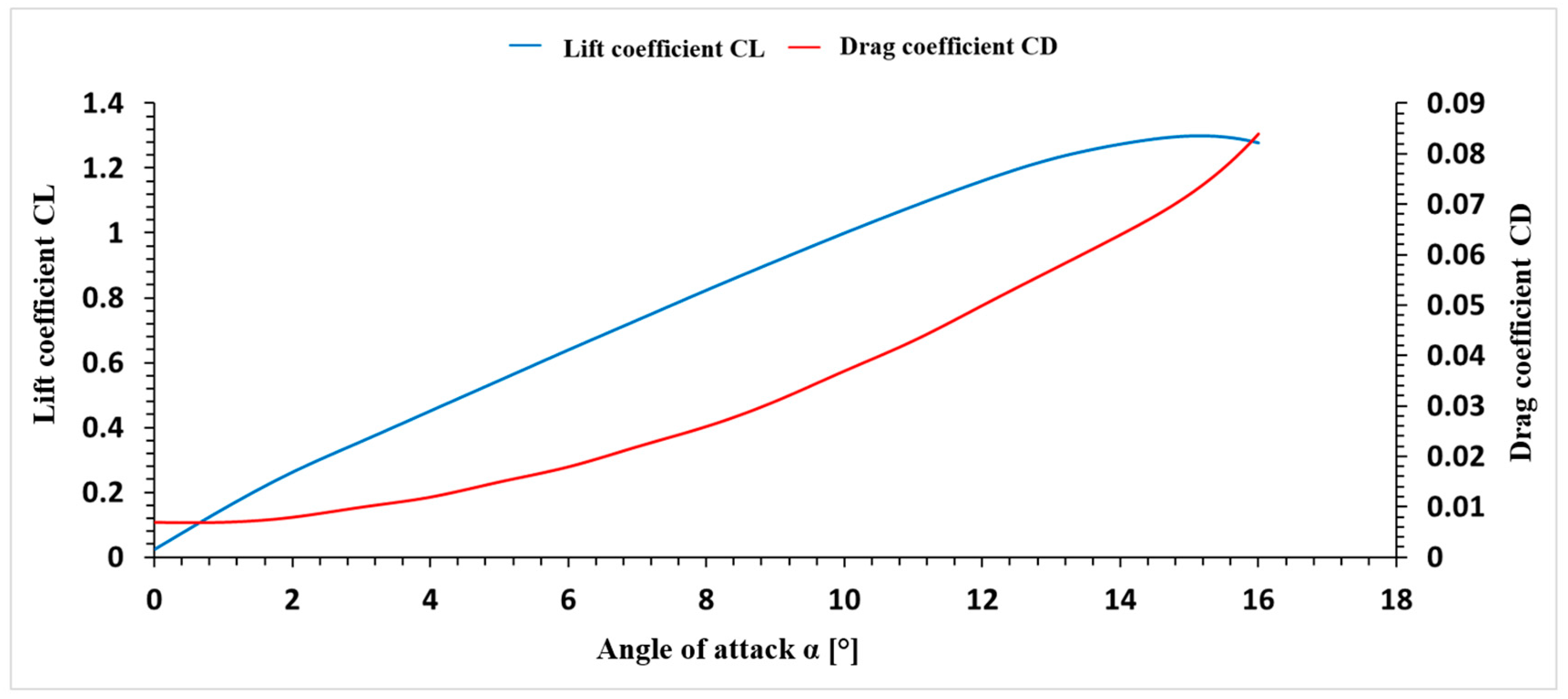
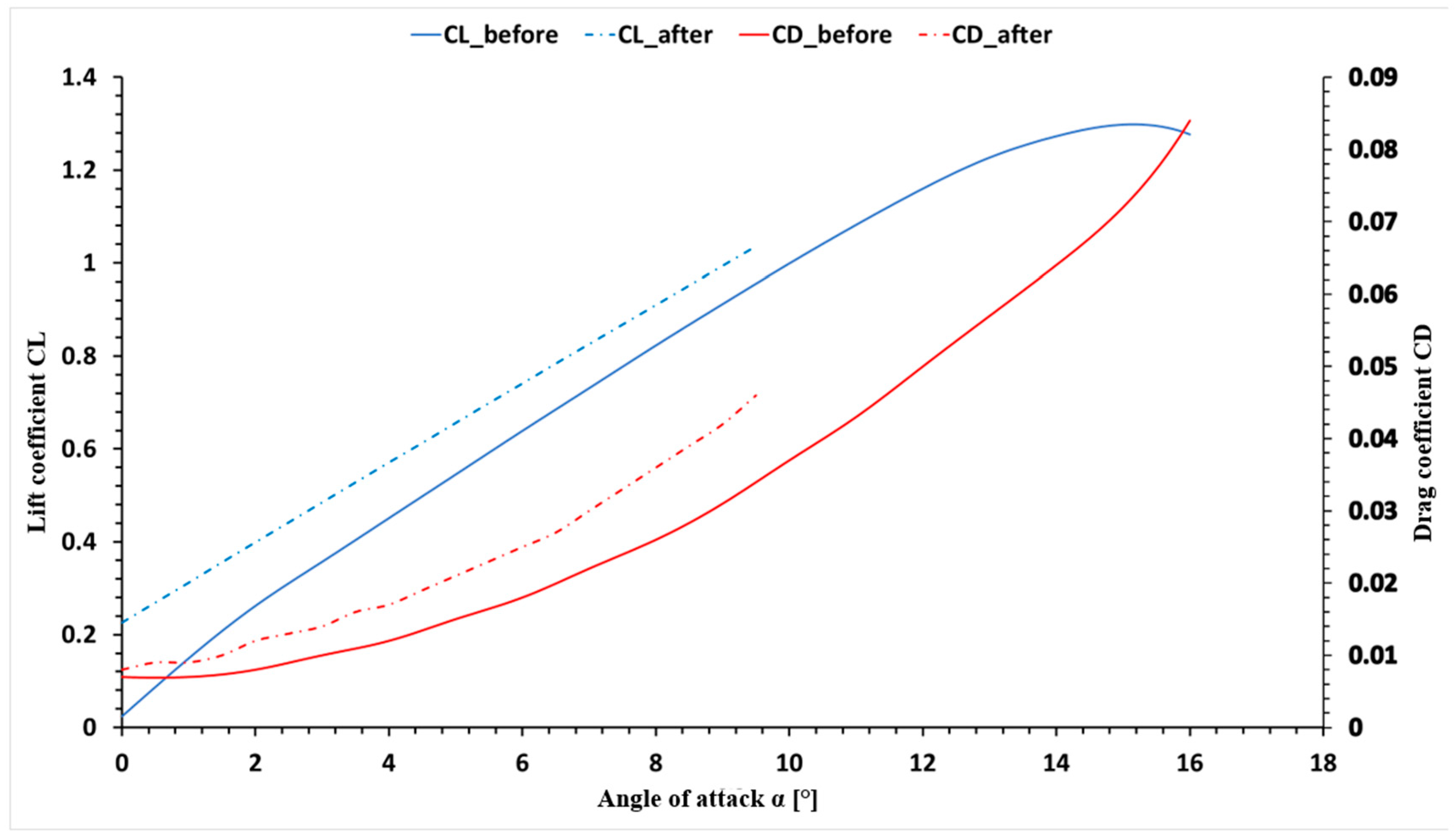
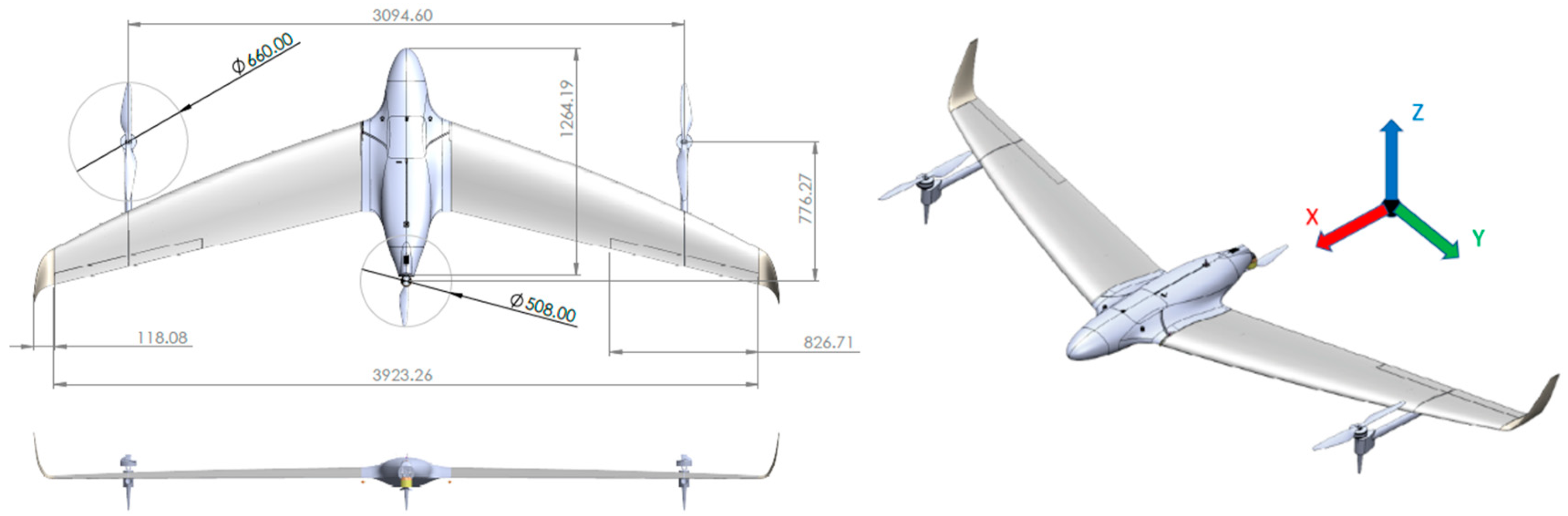
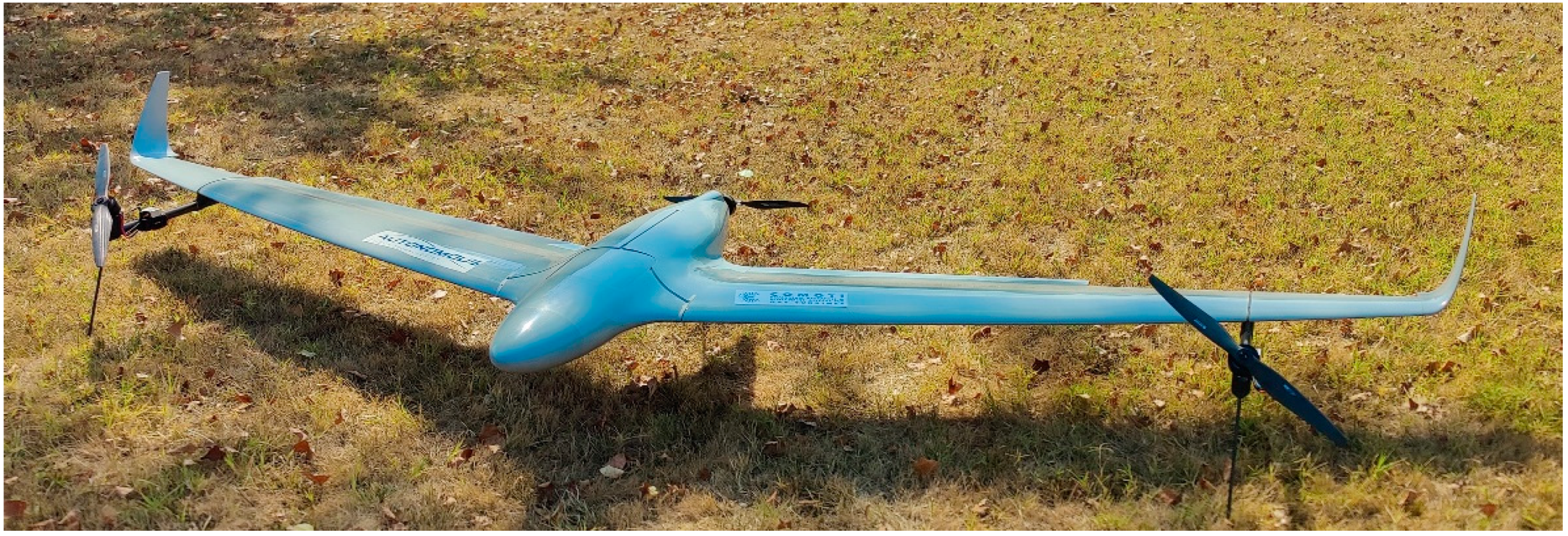
2.1. UAV Performance and Design
- Takeoff to an altitude of 100 m;
- Maintaining an altitude of 100 m for 20 s;
- Imposing a pitch angle of 60°;
- Movement while maintaining altitude for a distance of 10 km;
- Changing the pitch angle to 85° when the wing provides the necessary lift for the aircraft.
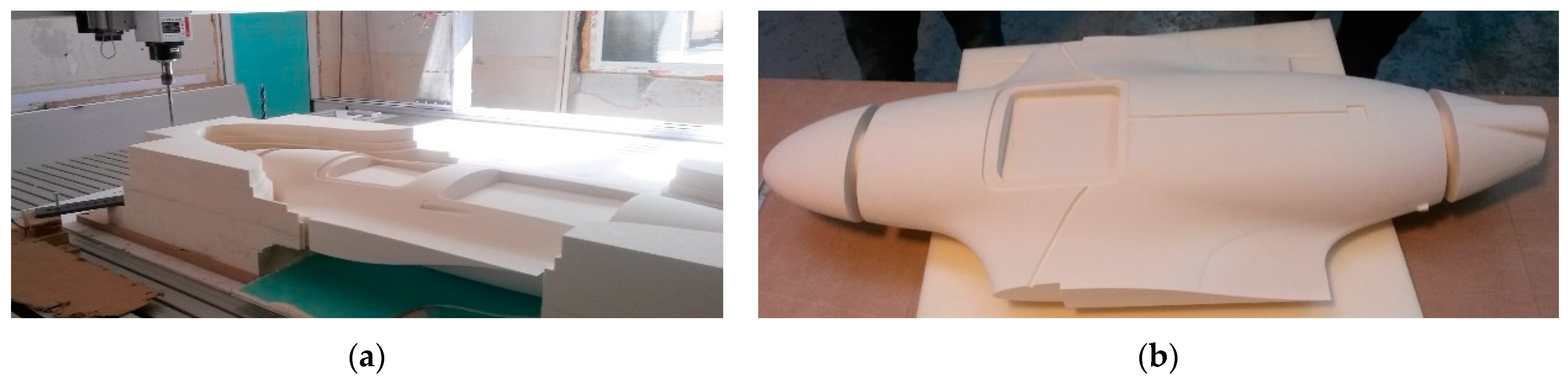
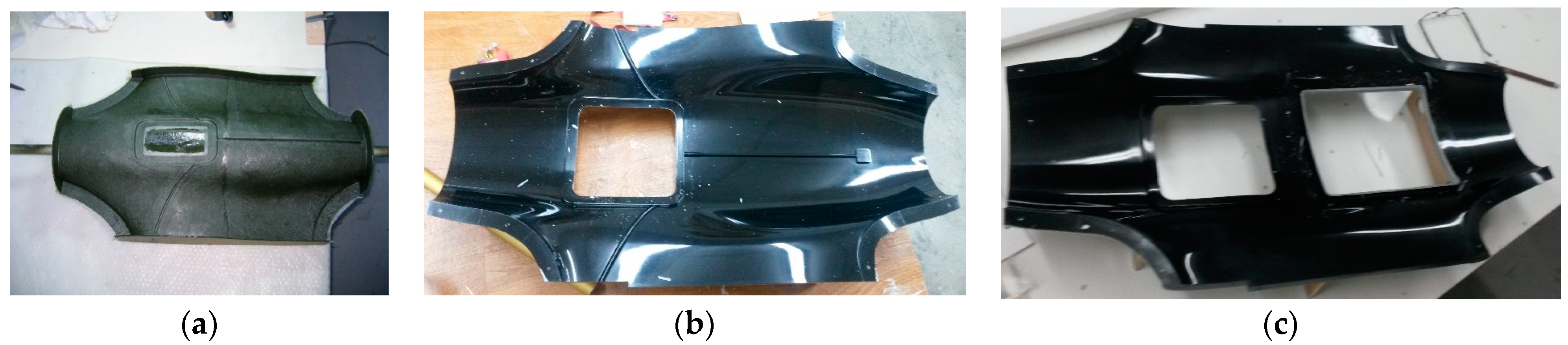
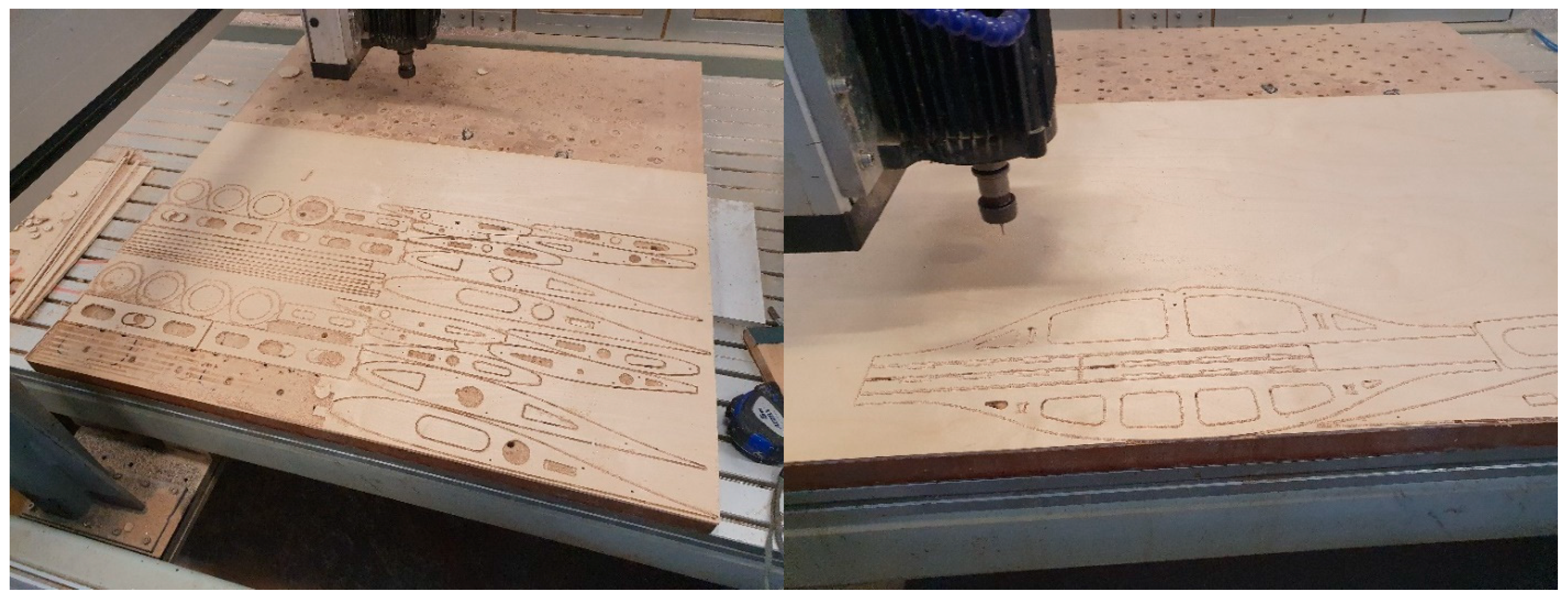
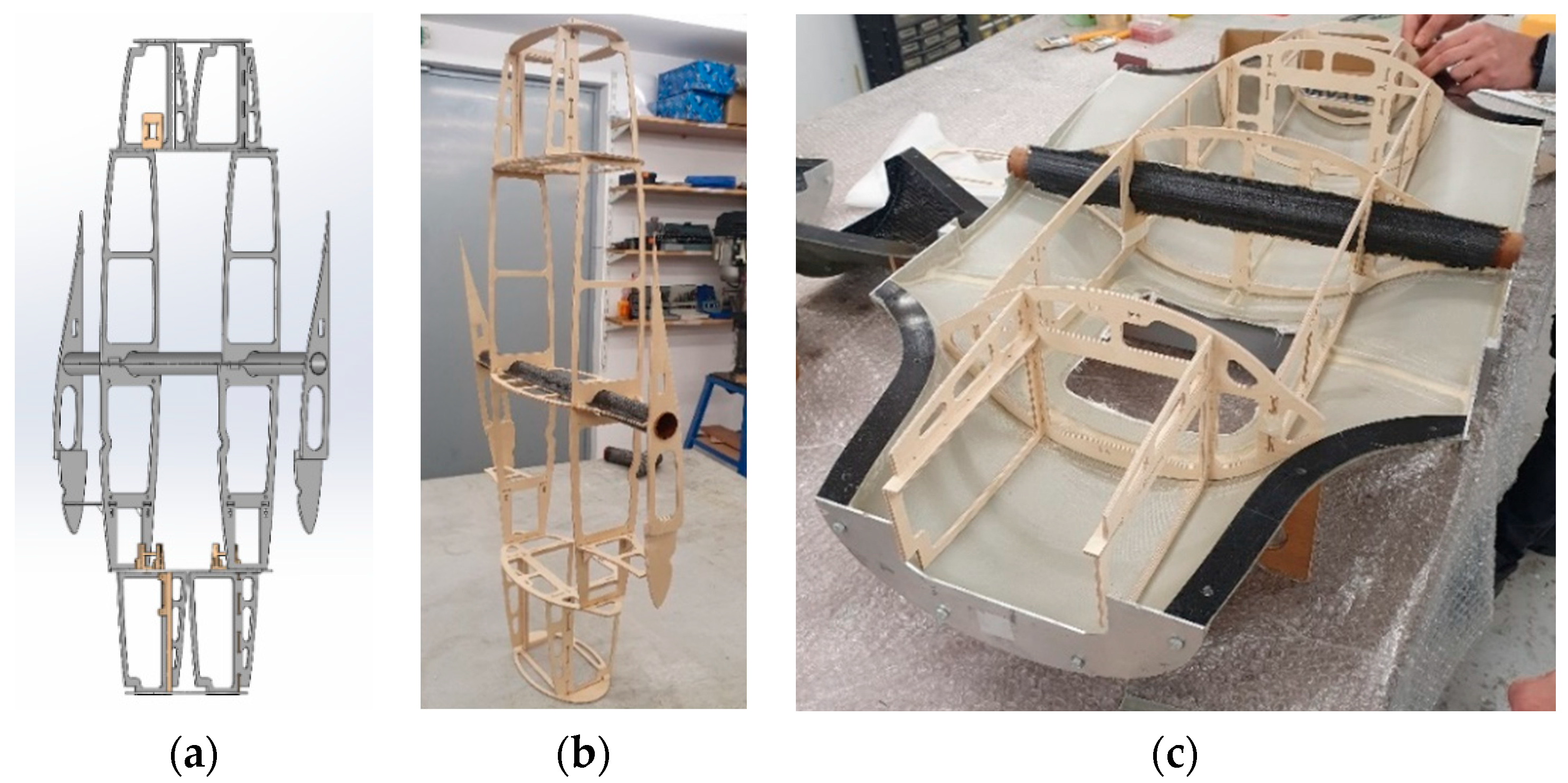
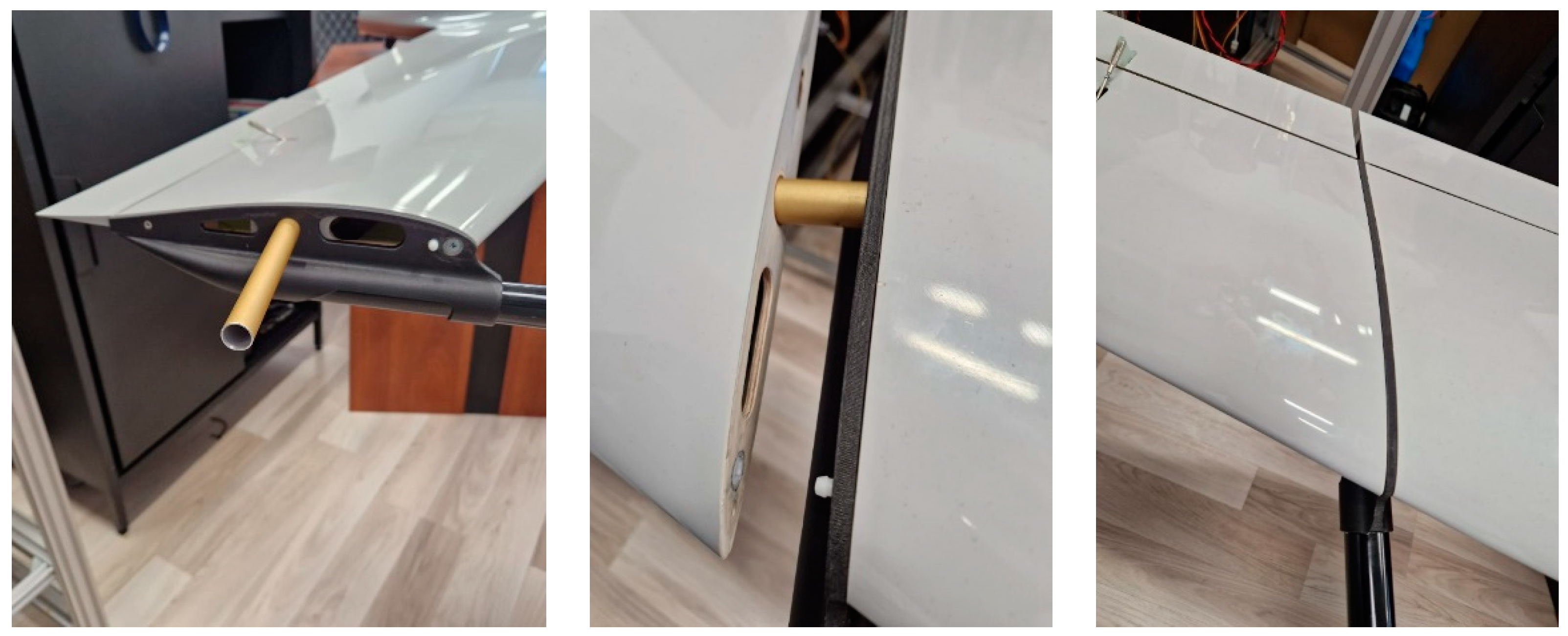
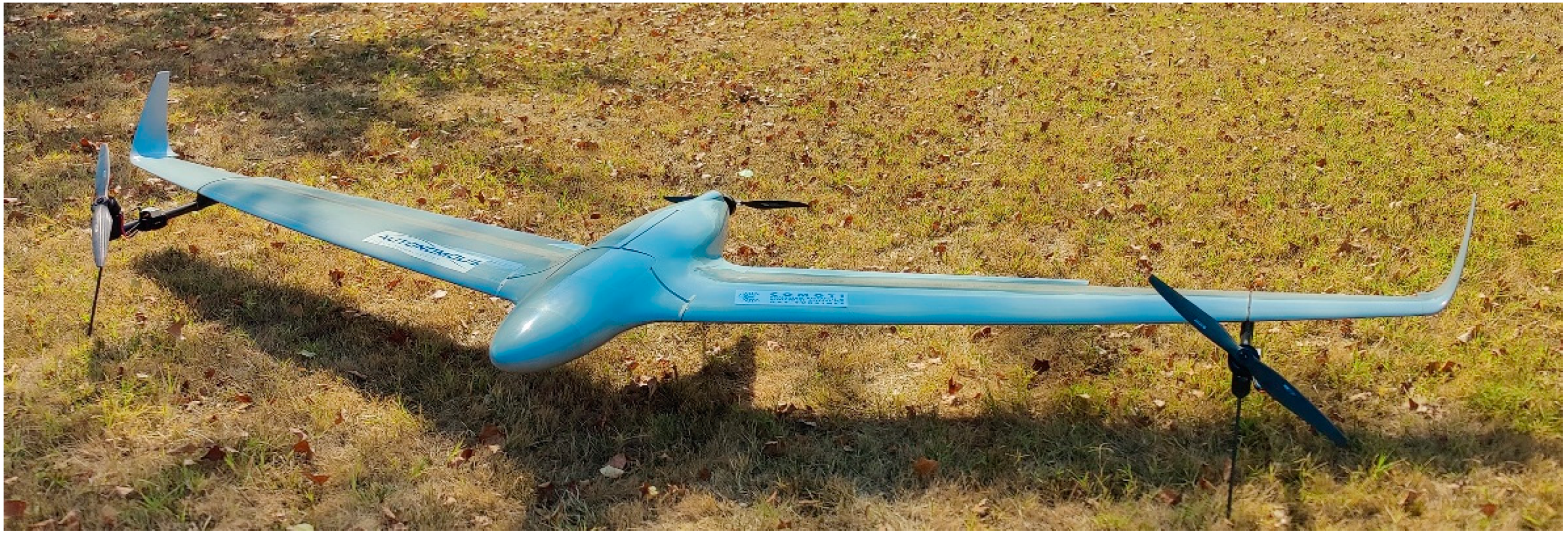
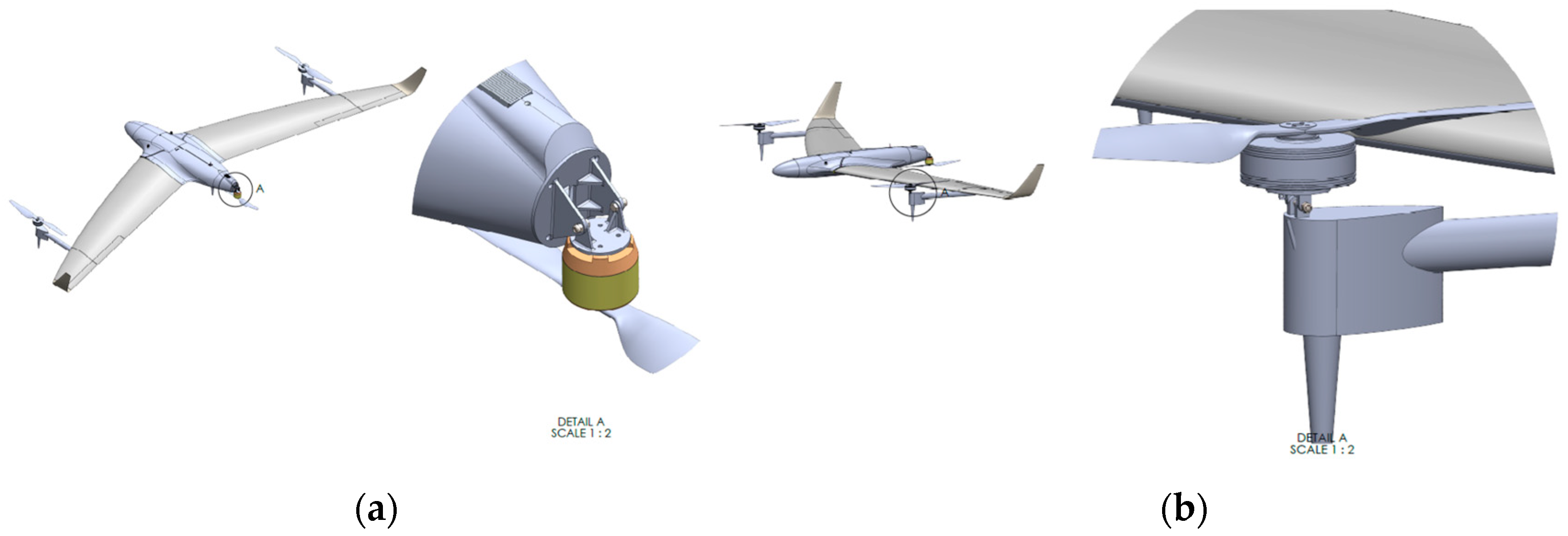
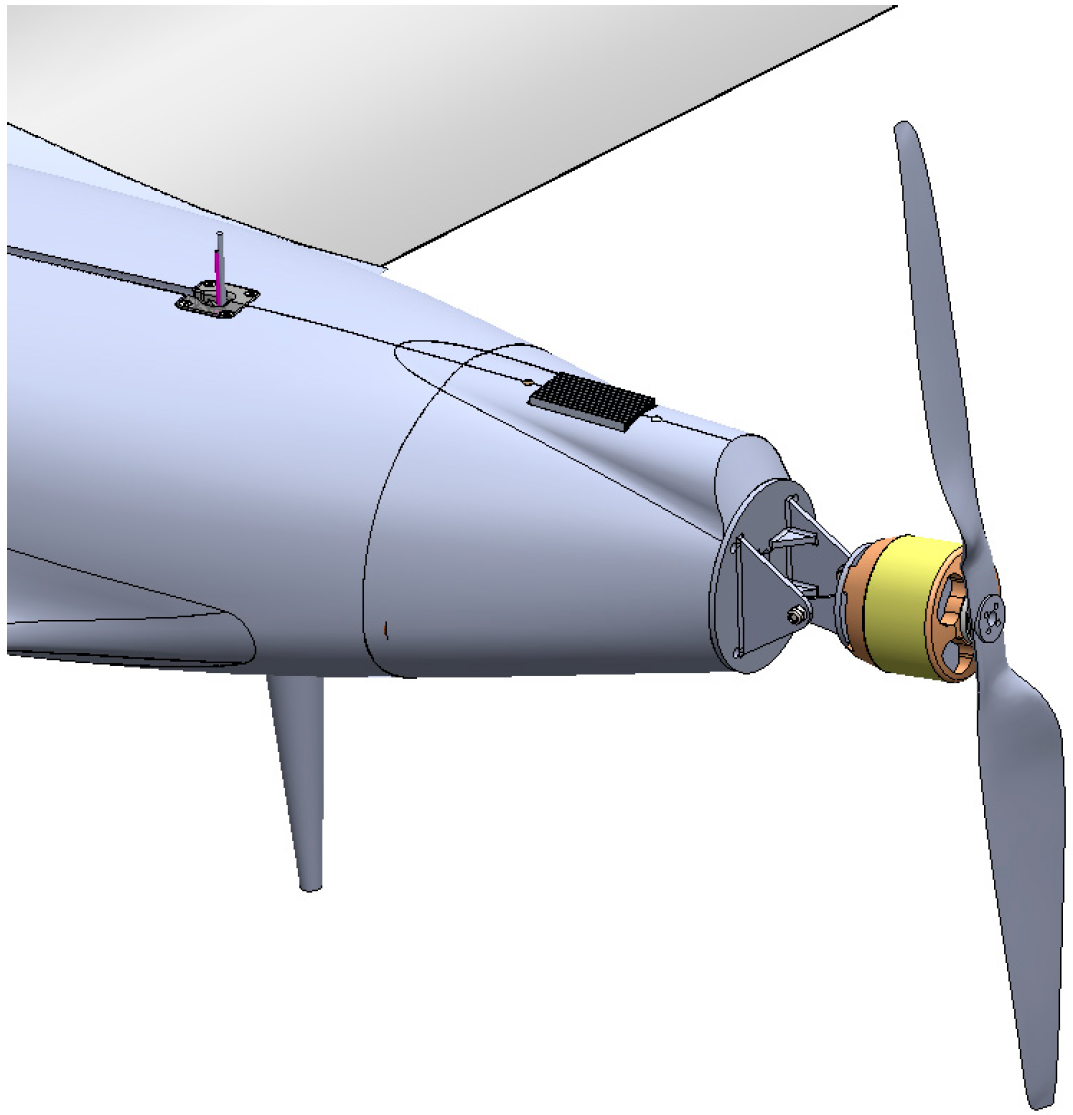
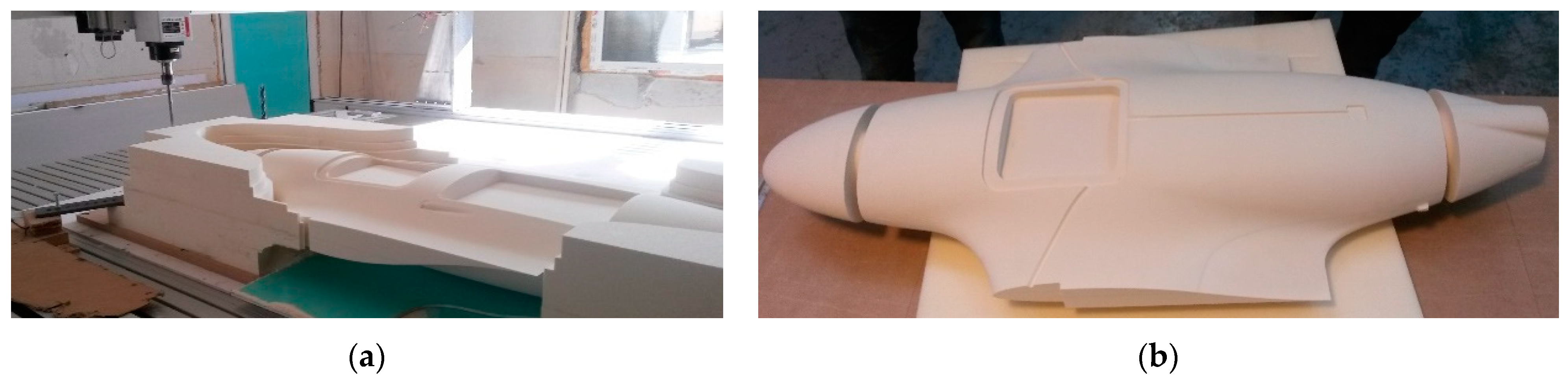
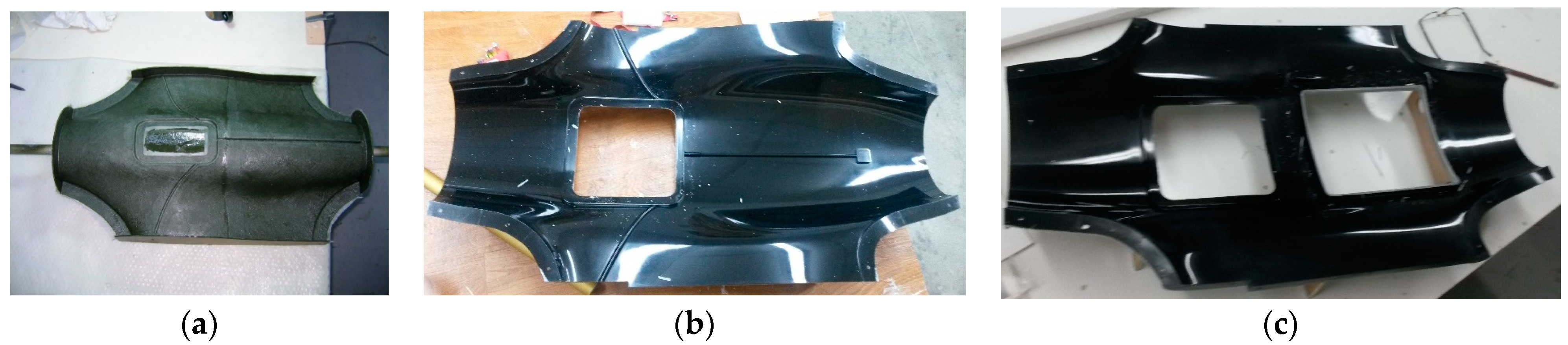
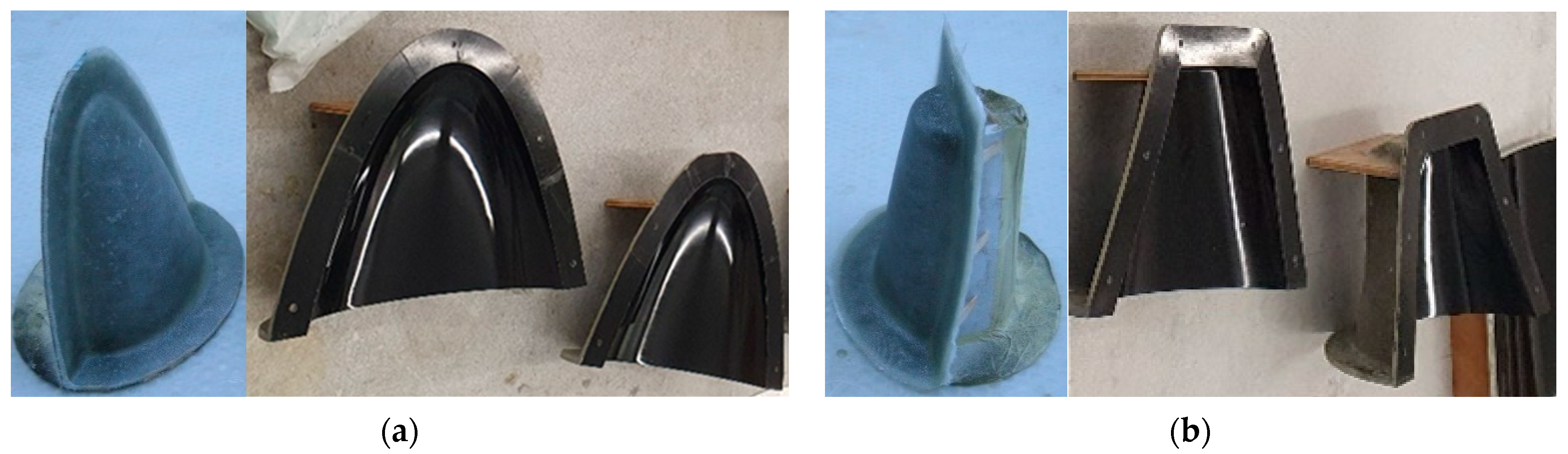
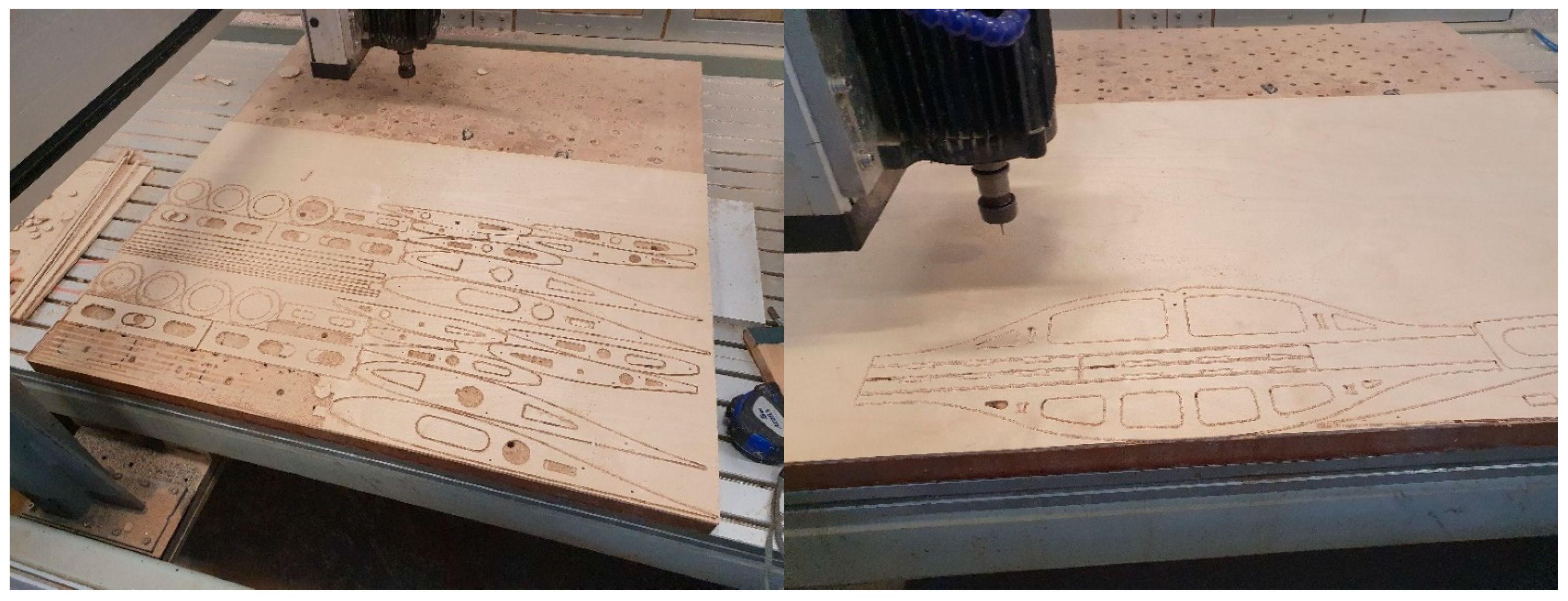
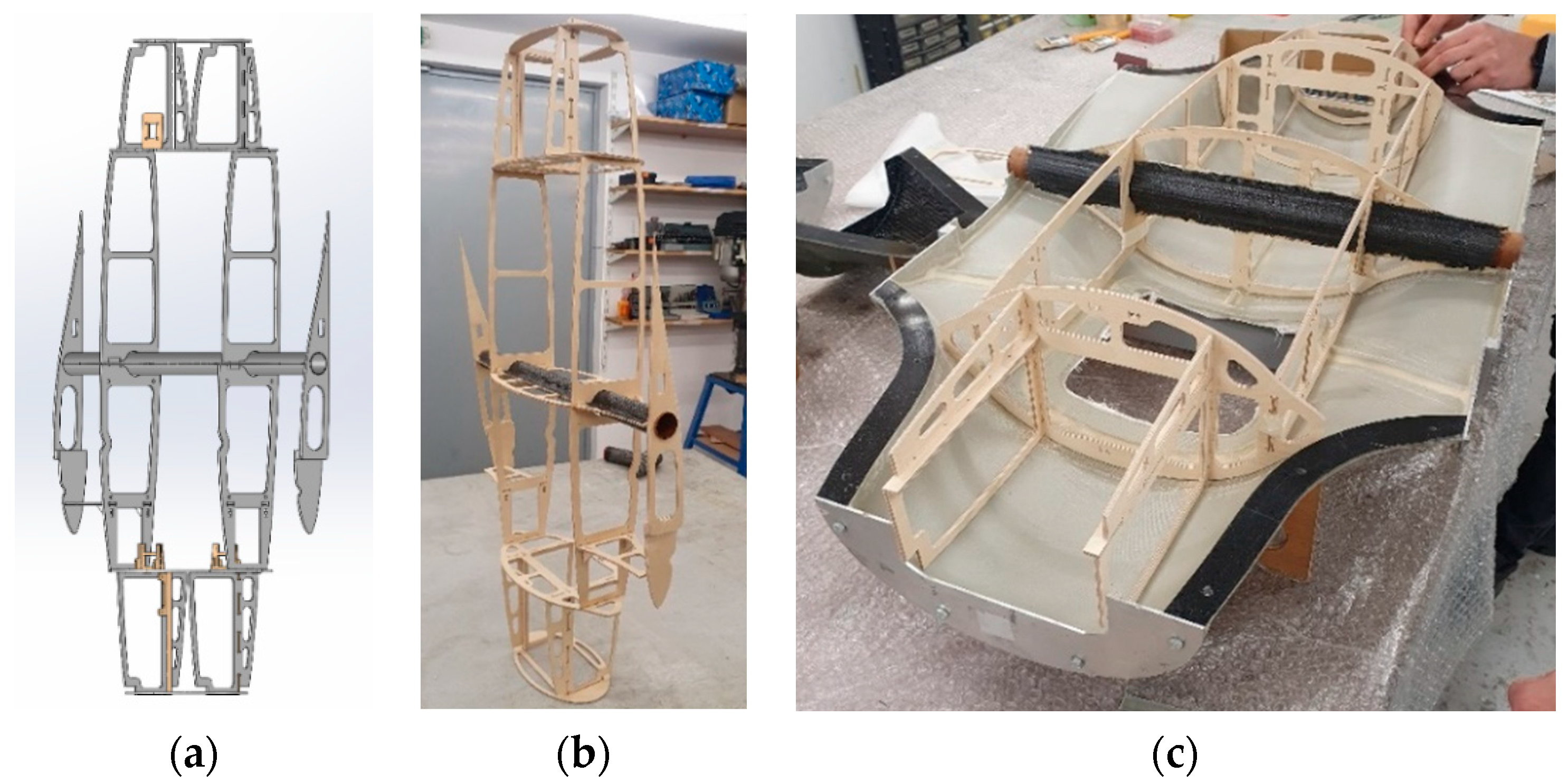
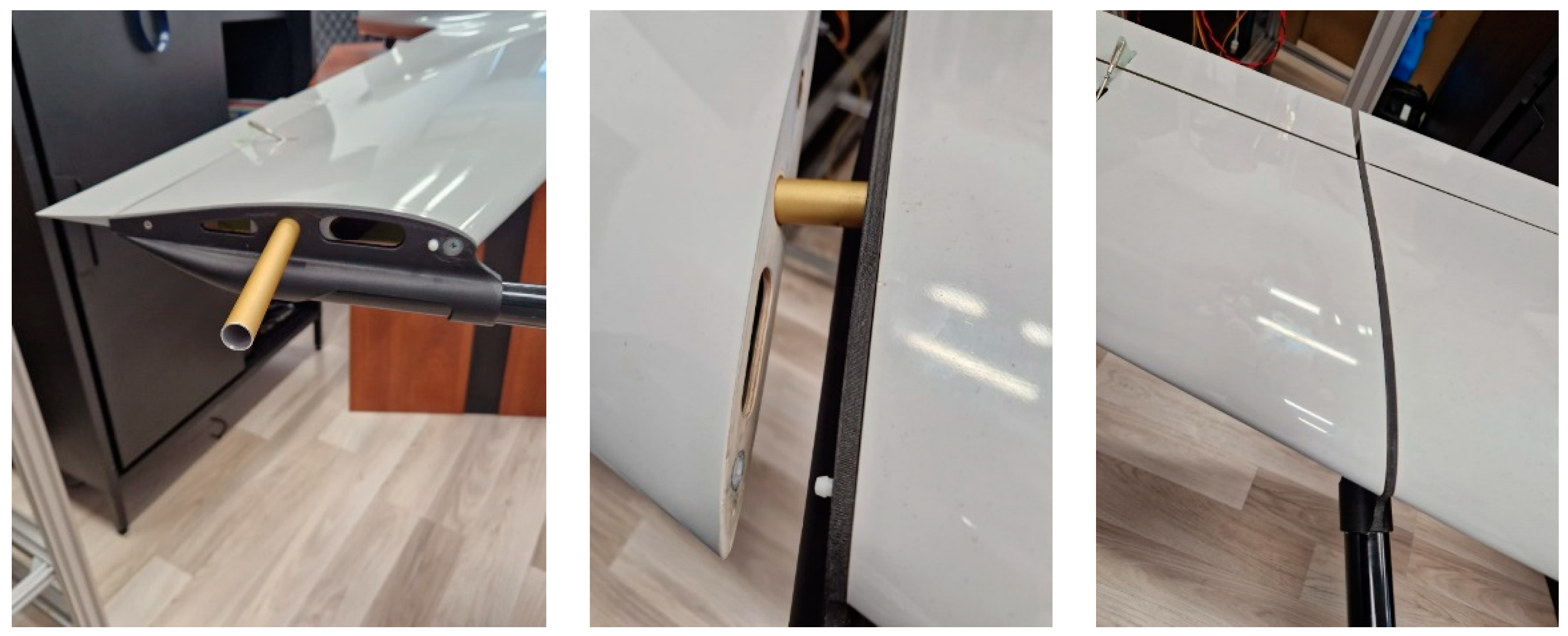
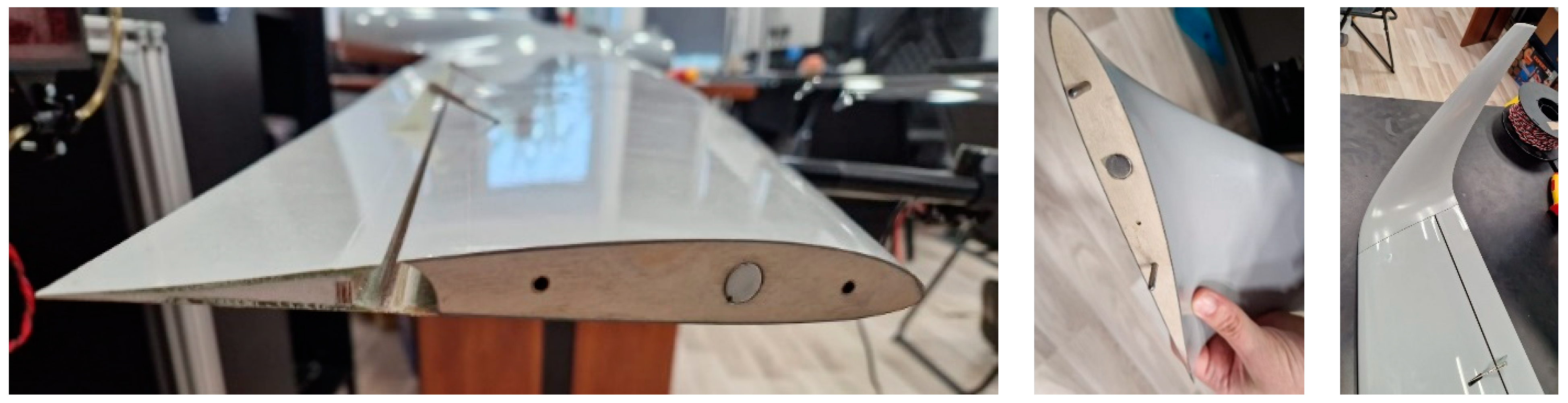
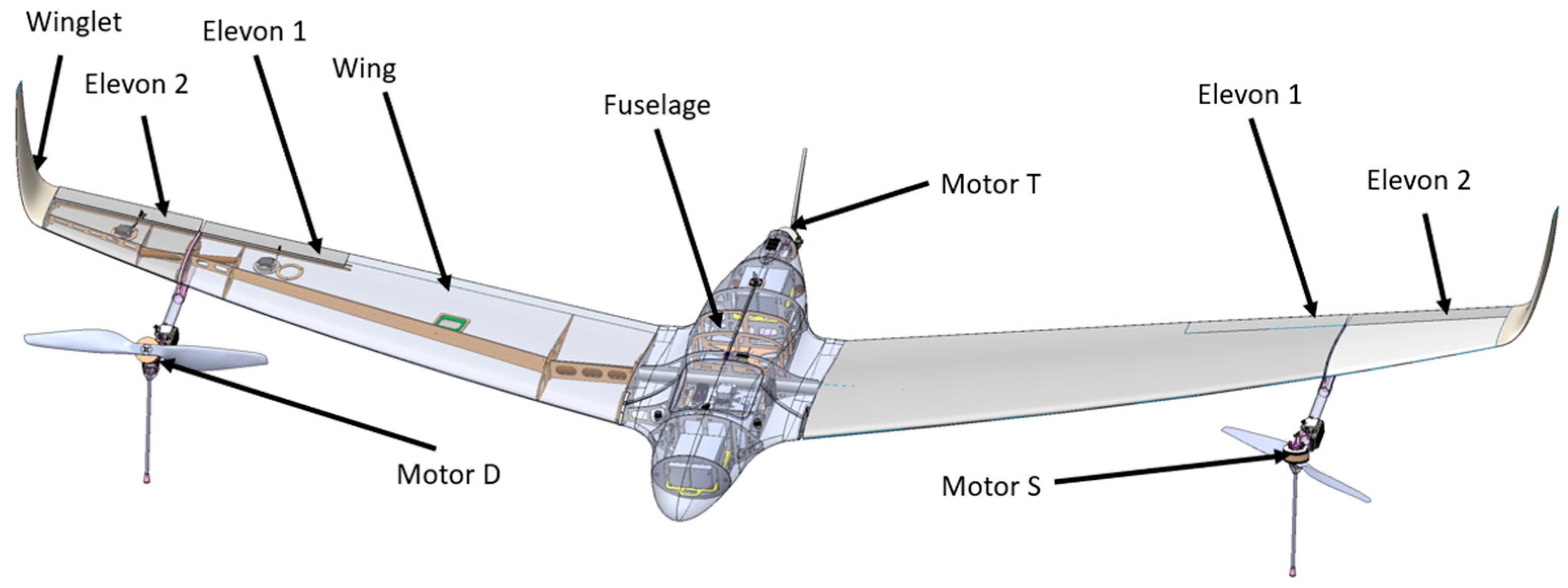
2.2. Manufacturing the Structure of the Experimental Model
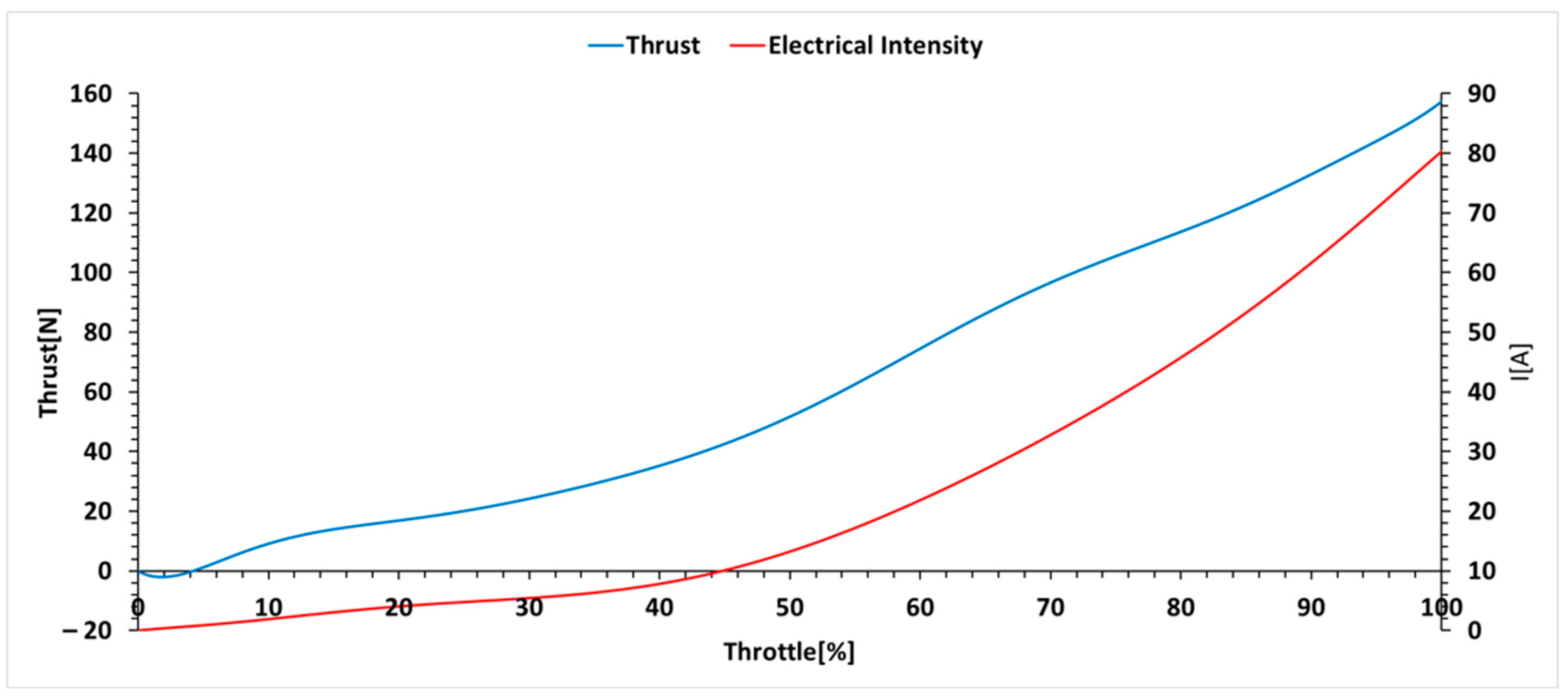
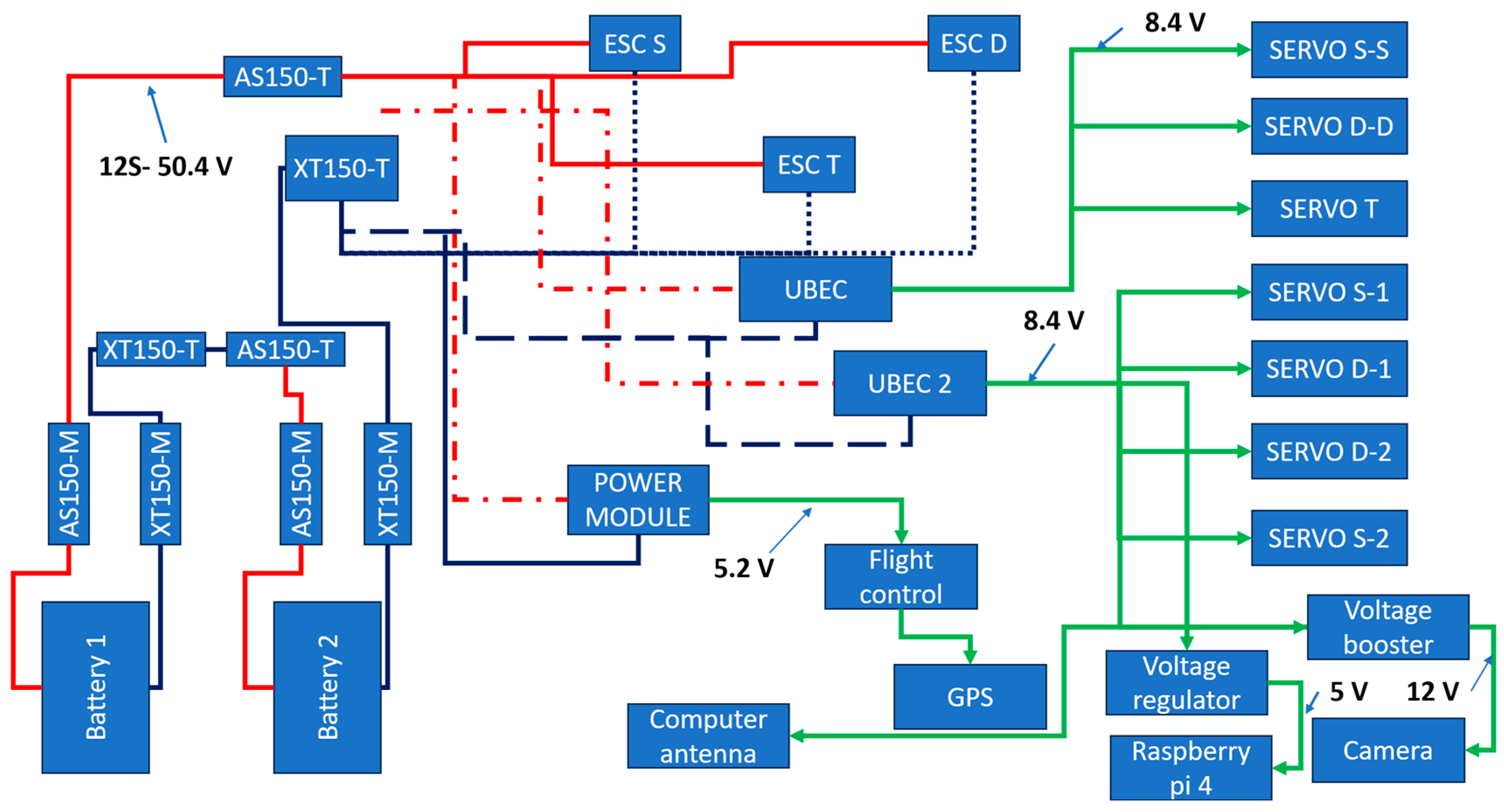
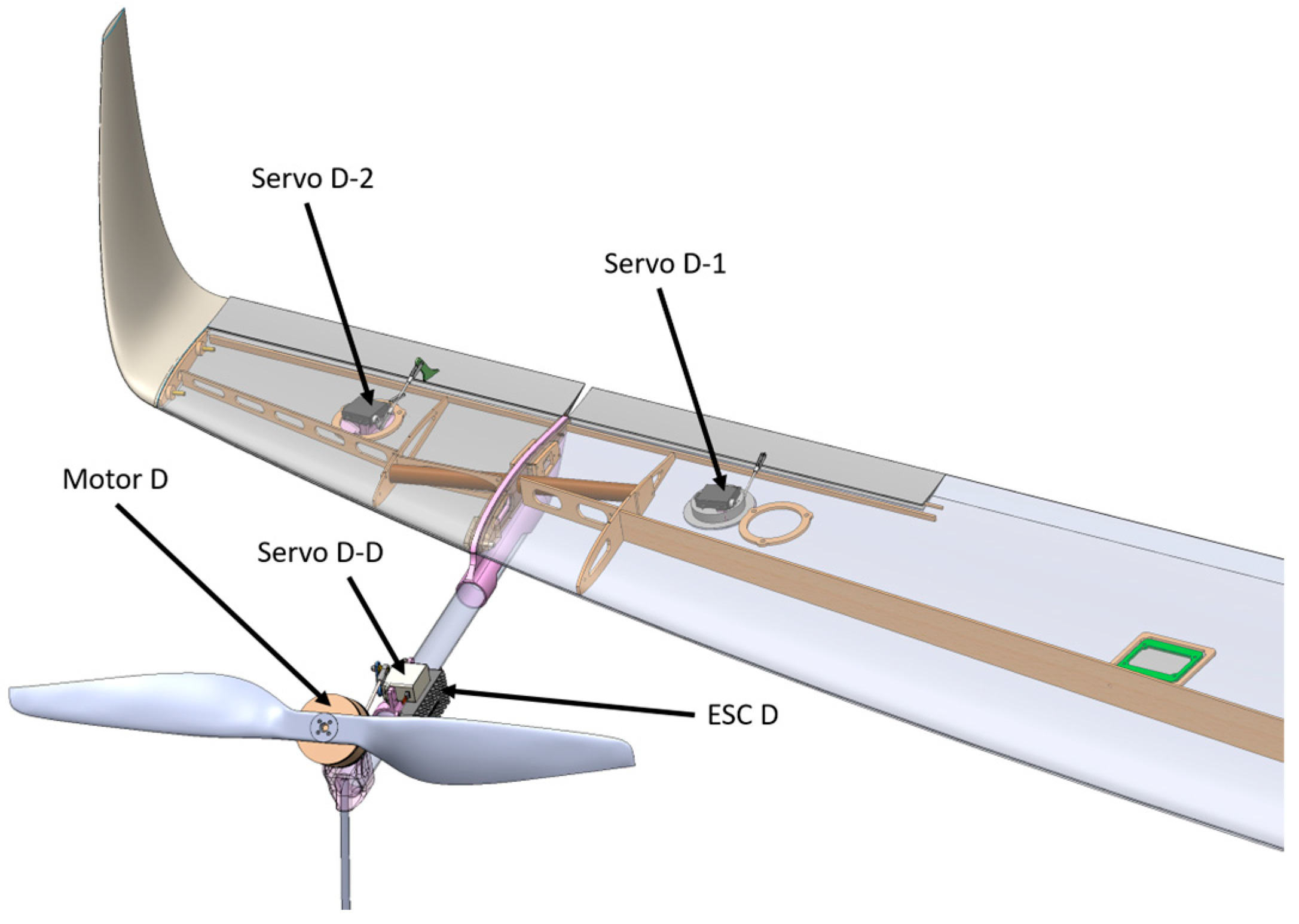
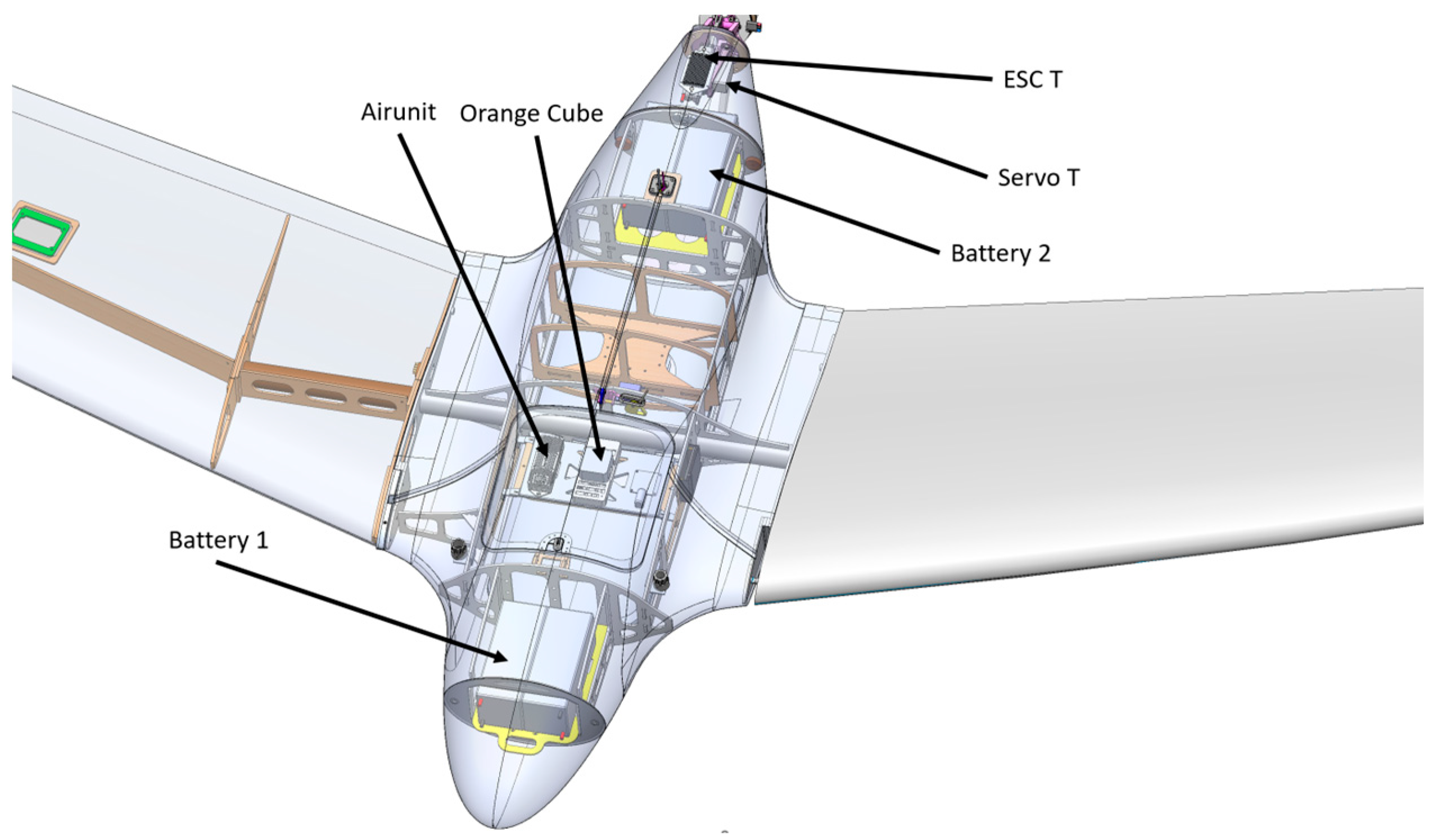
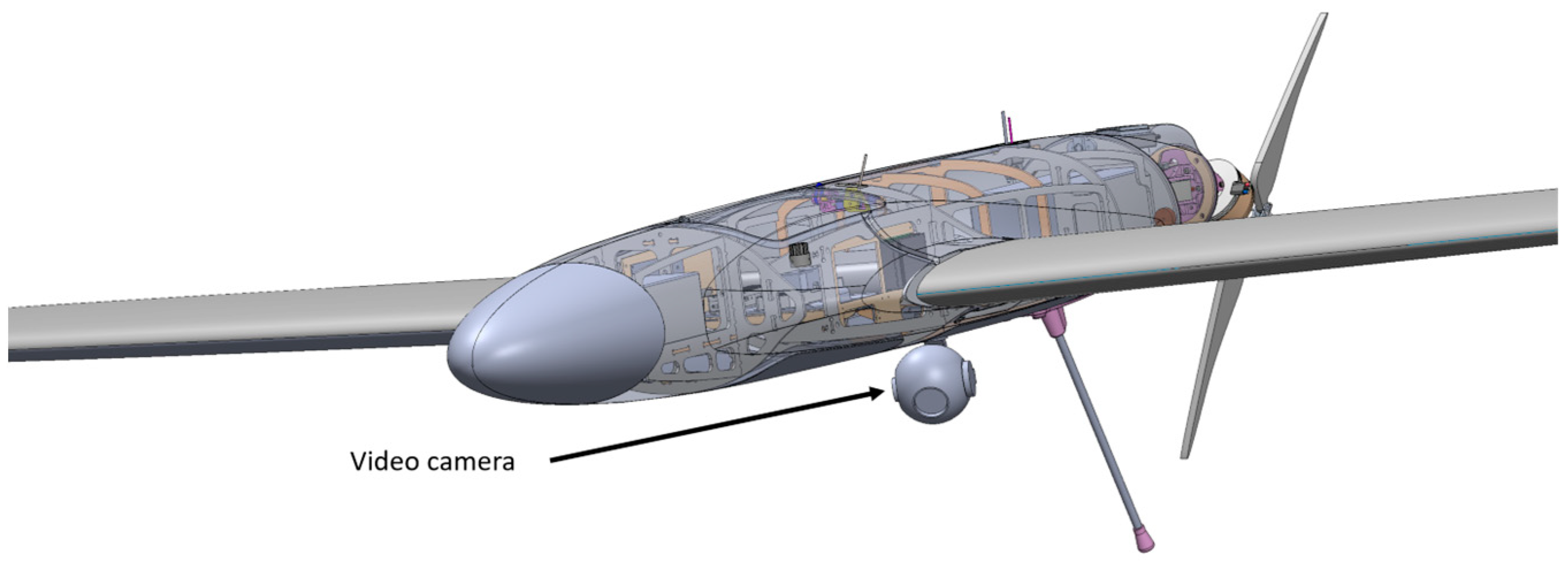
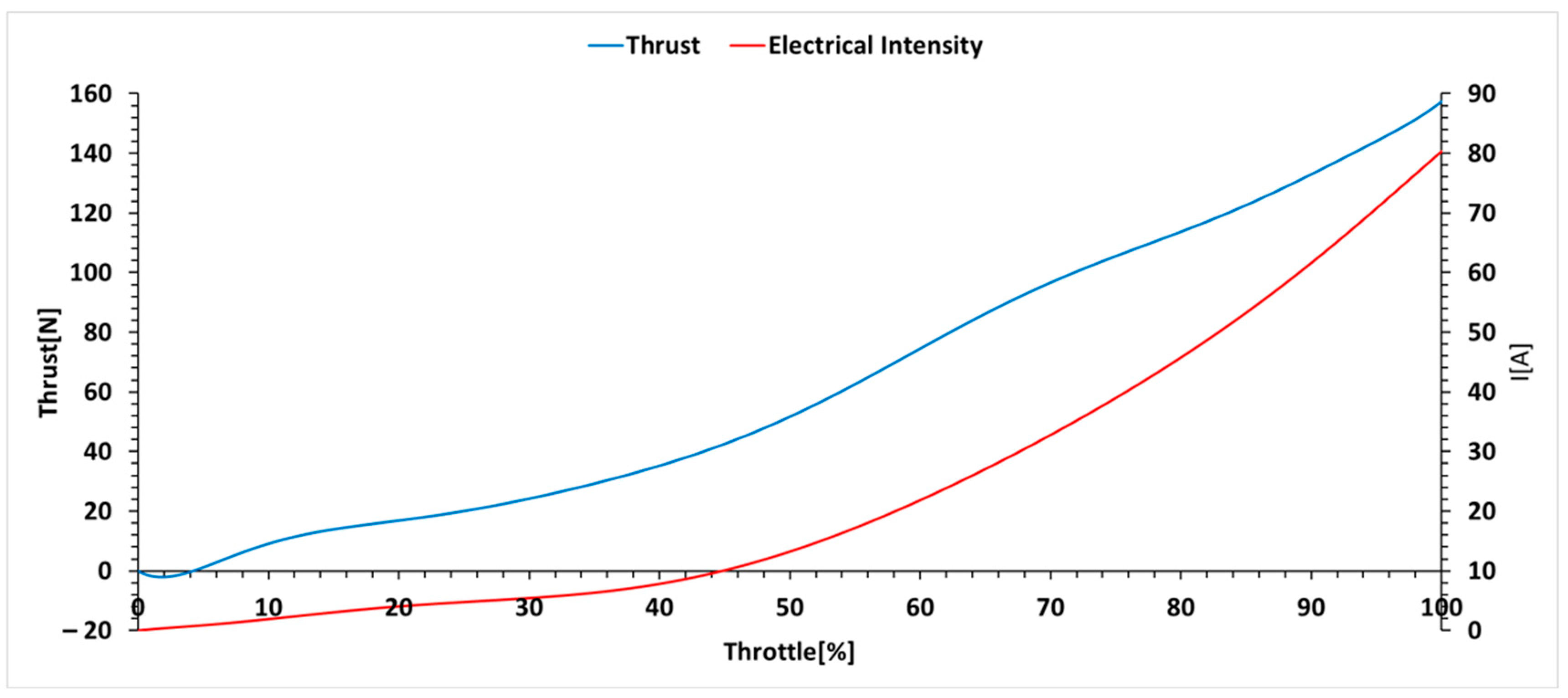
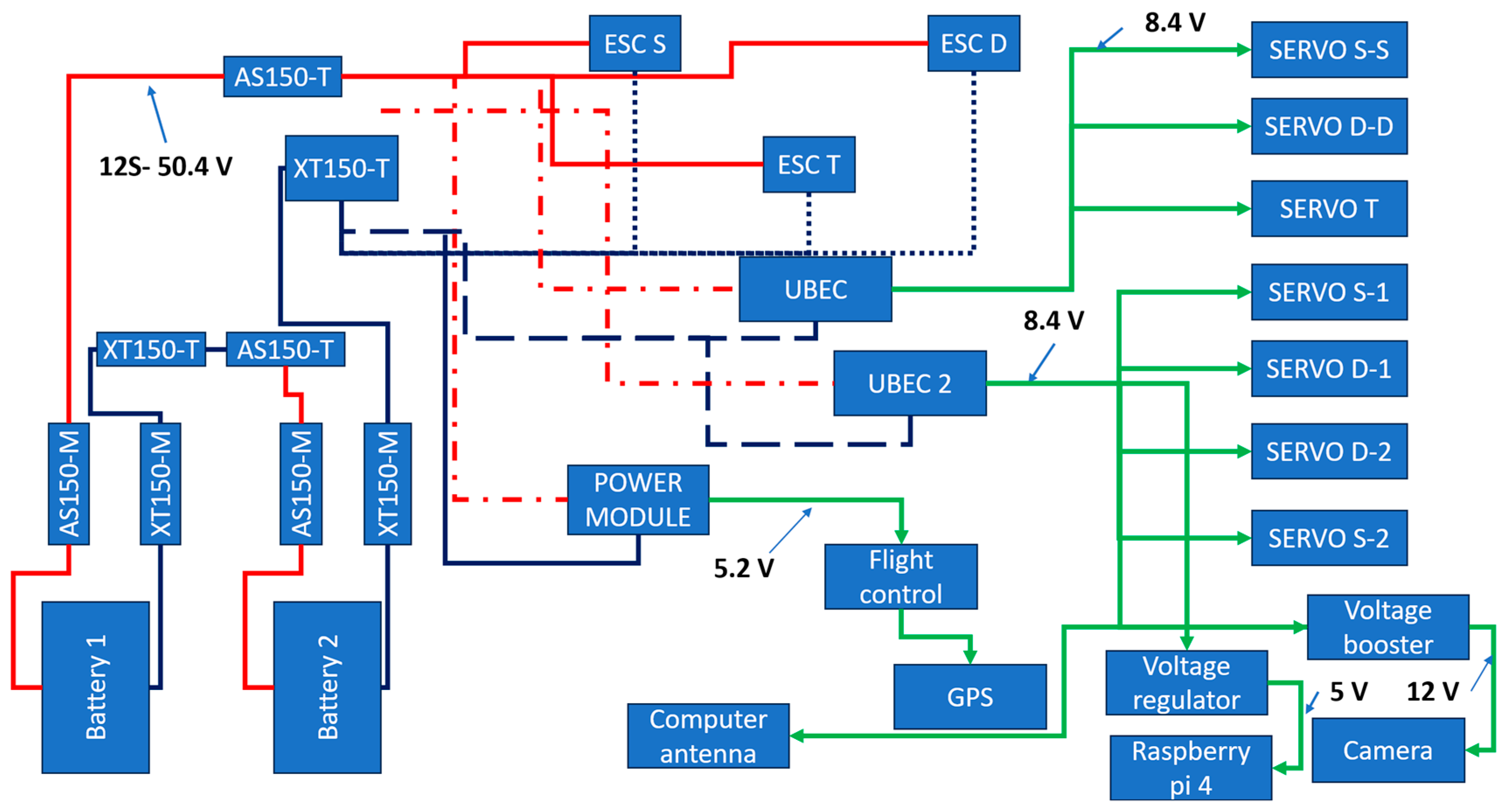
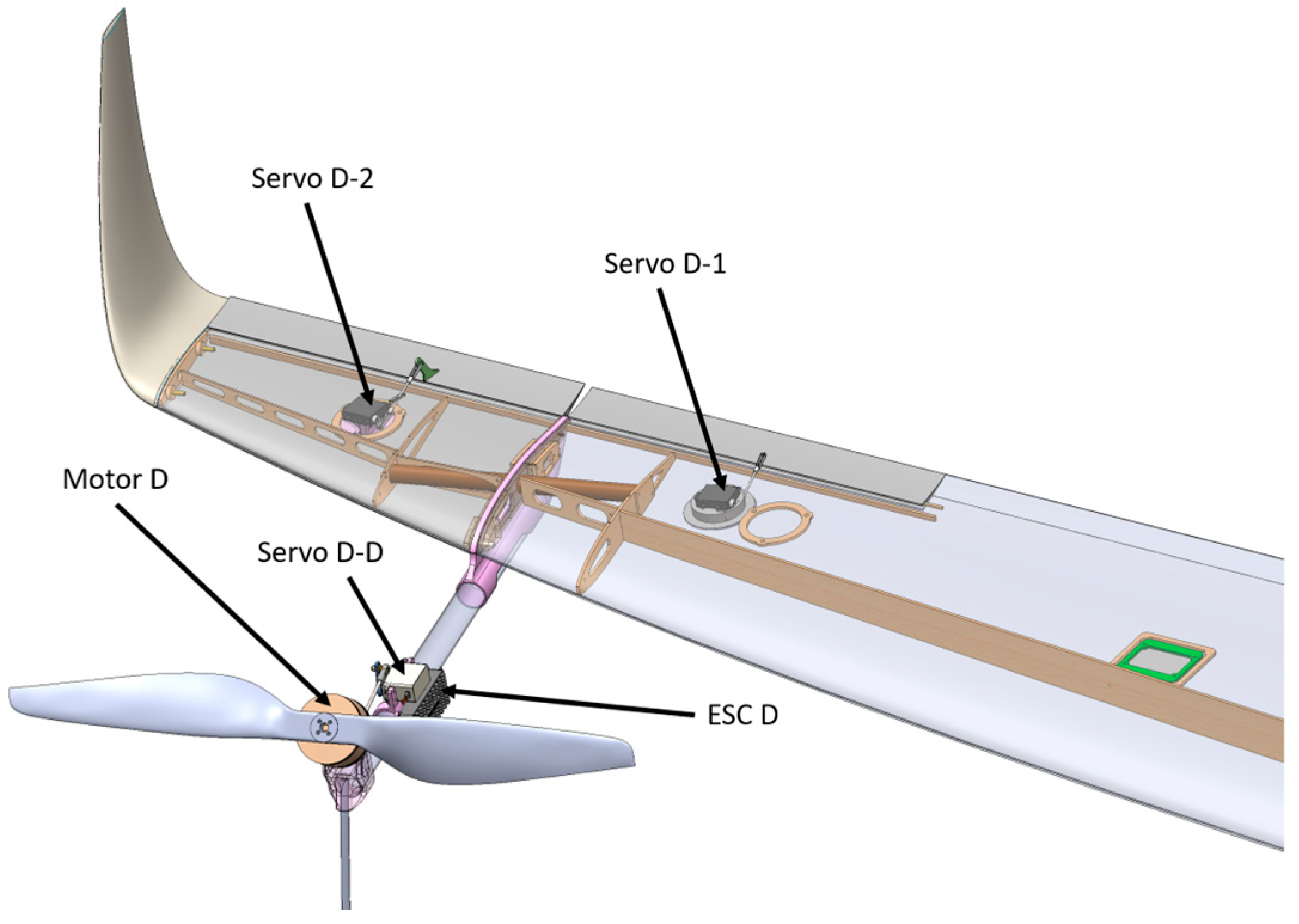
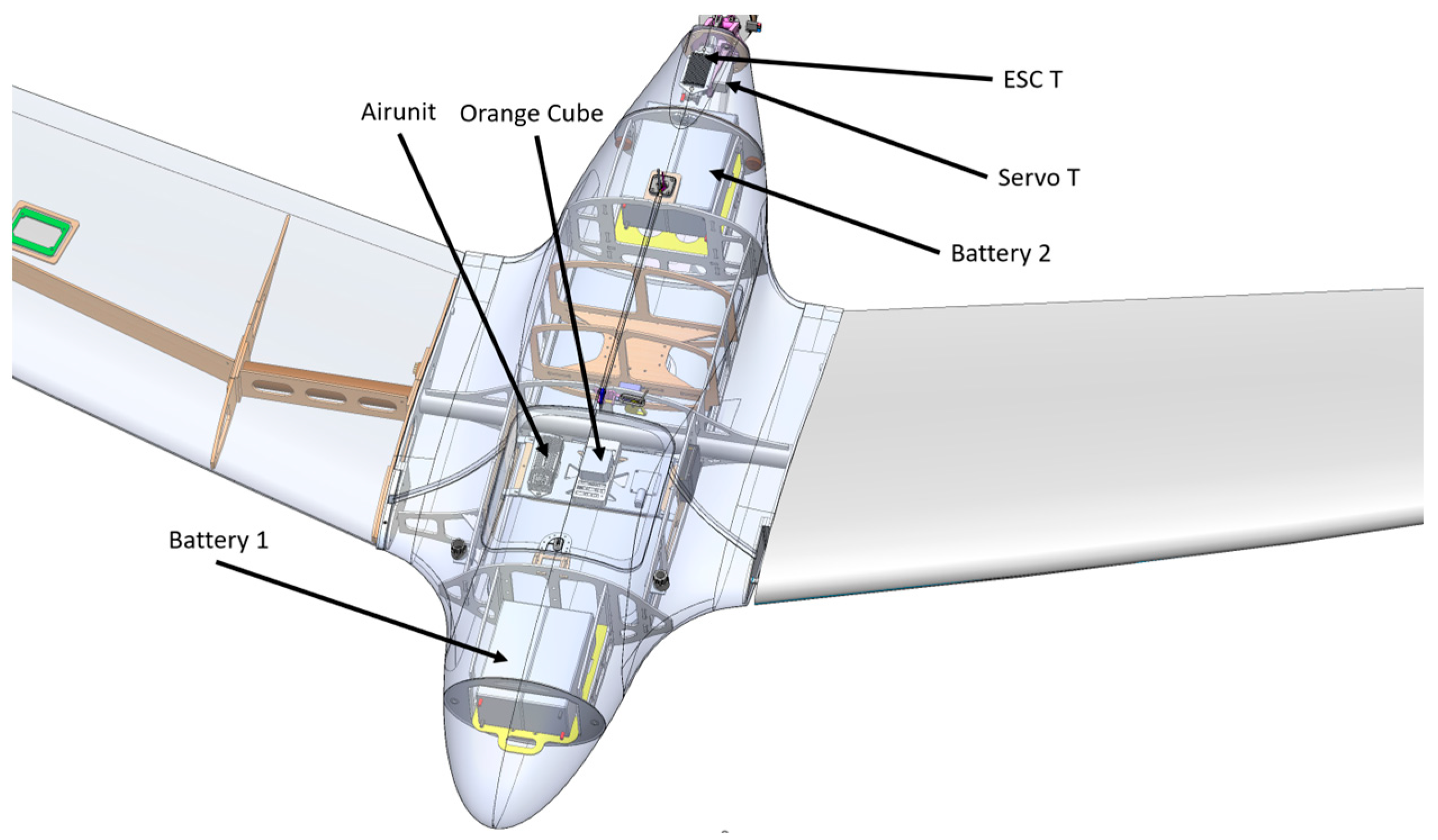
2.3. Drone’s Electrical System
- Propulsion system;
- Command and control system;
- Transmission system;
- Control system for control surfaces;
- Auxiliary systems.
3. Results
3.1. Performance and Design of the UAV
3.2. Results of Manufacturing the Experimental Model Structure
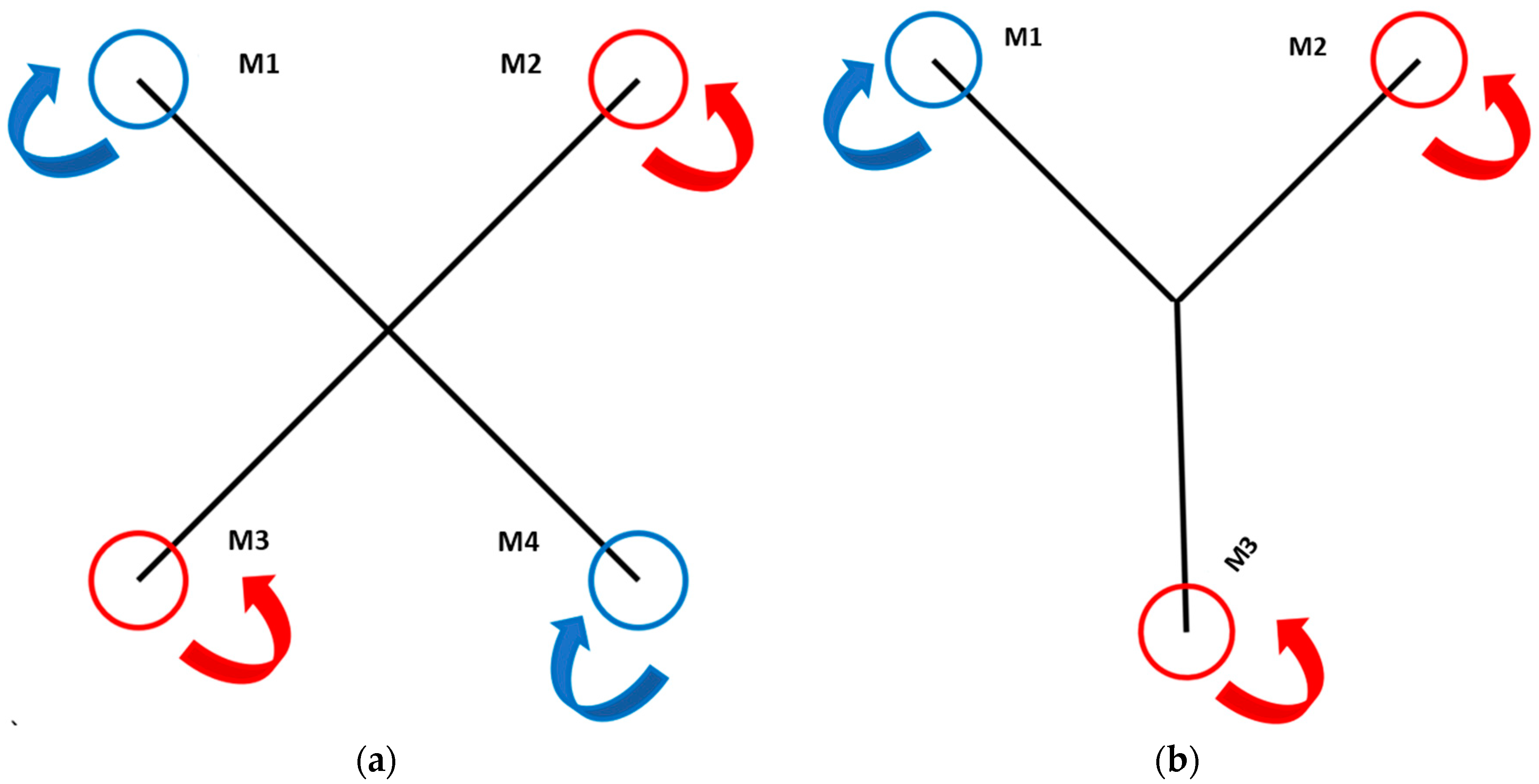
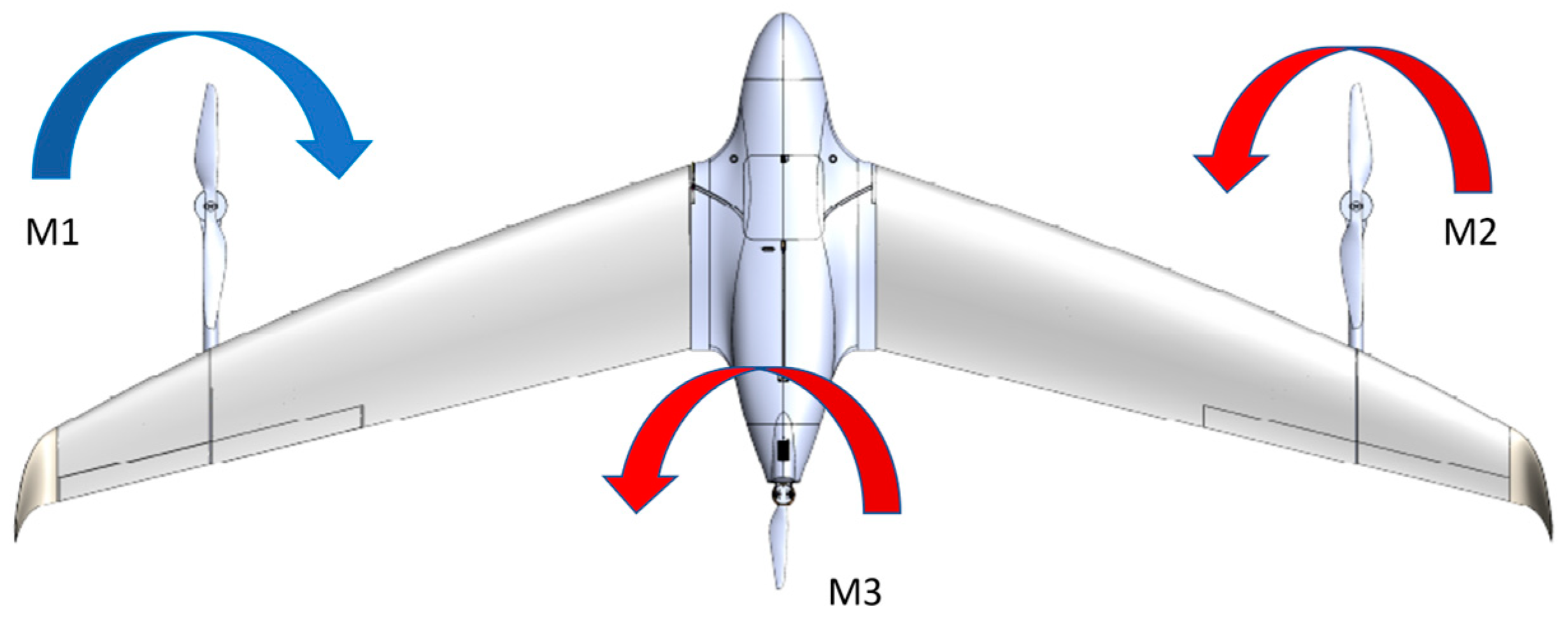
3.3. Results of Manufacturing the Experimental Model Structure
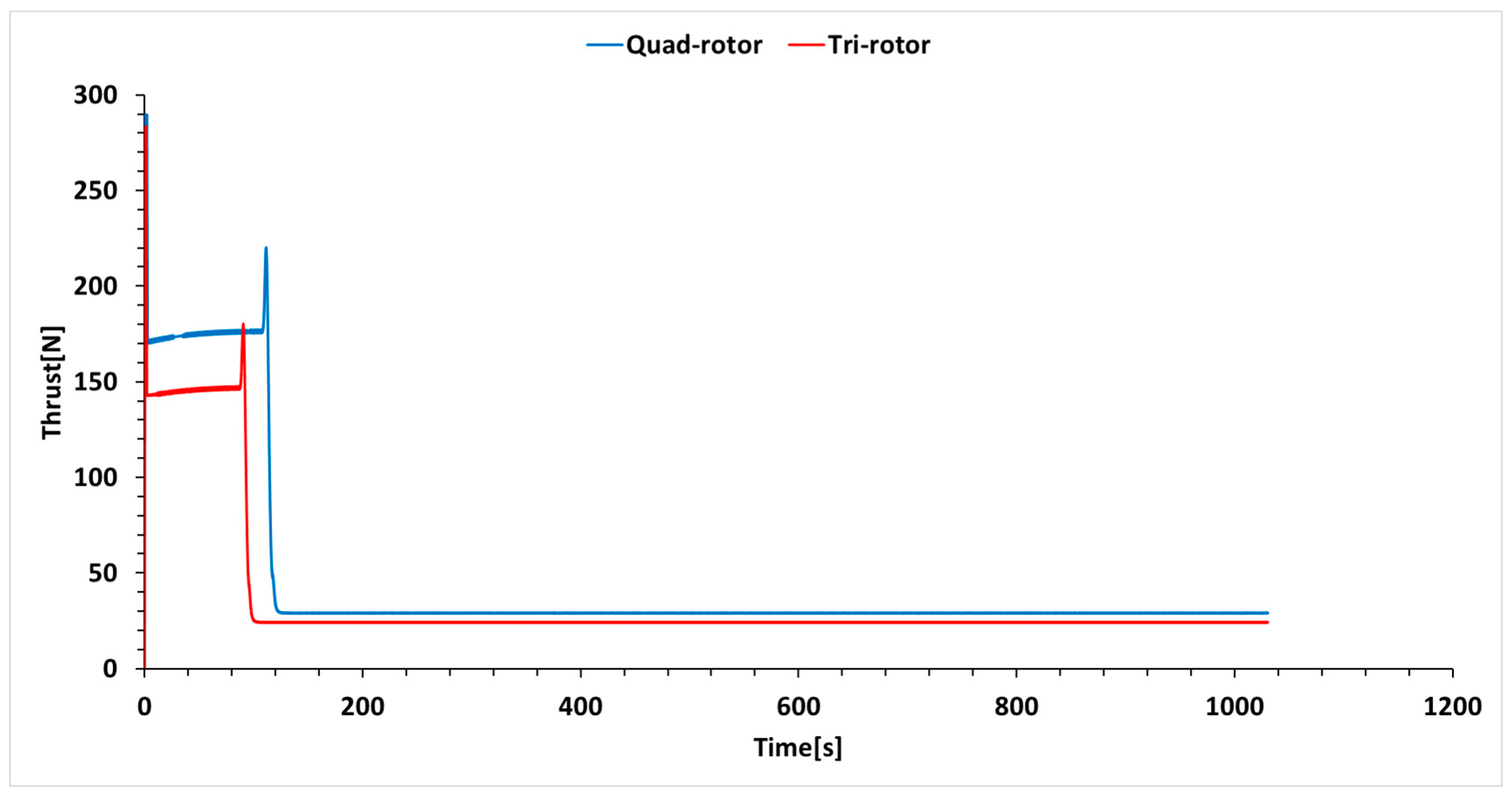
- In VTOL flight mode (hovering): UAV control is achieved by adjusting the speed of the three motors, and roll stability is maintained through vectorization of the front motors.
- In cruise mode: UAV control is performed by manipulating control surfaces and adjusting the speed of motor T.
- In transition mode from VTOL to cruise: Control is managed through the speed of the three motors and their vectorization.
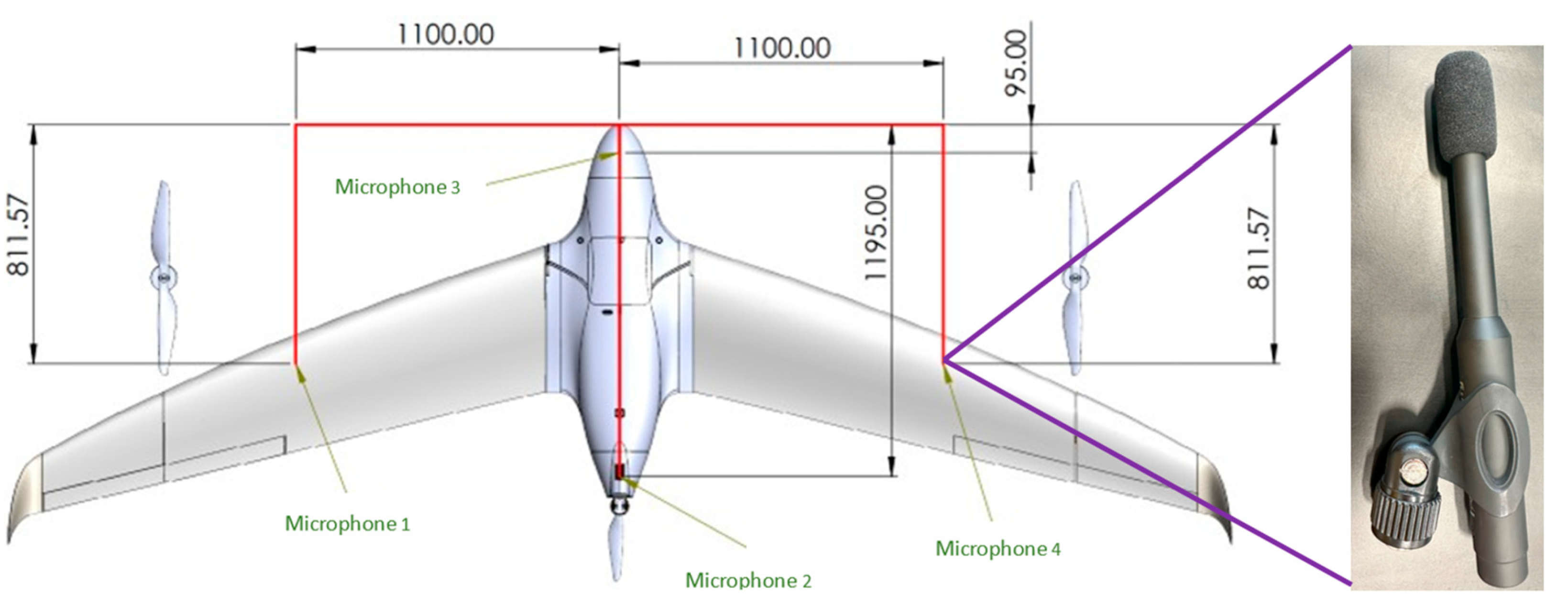
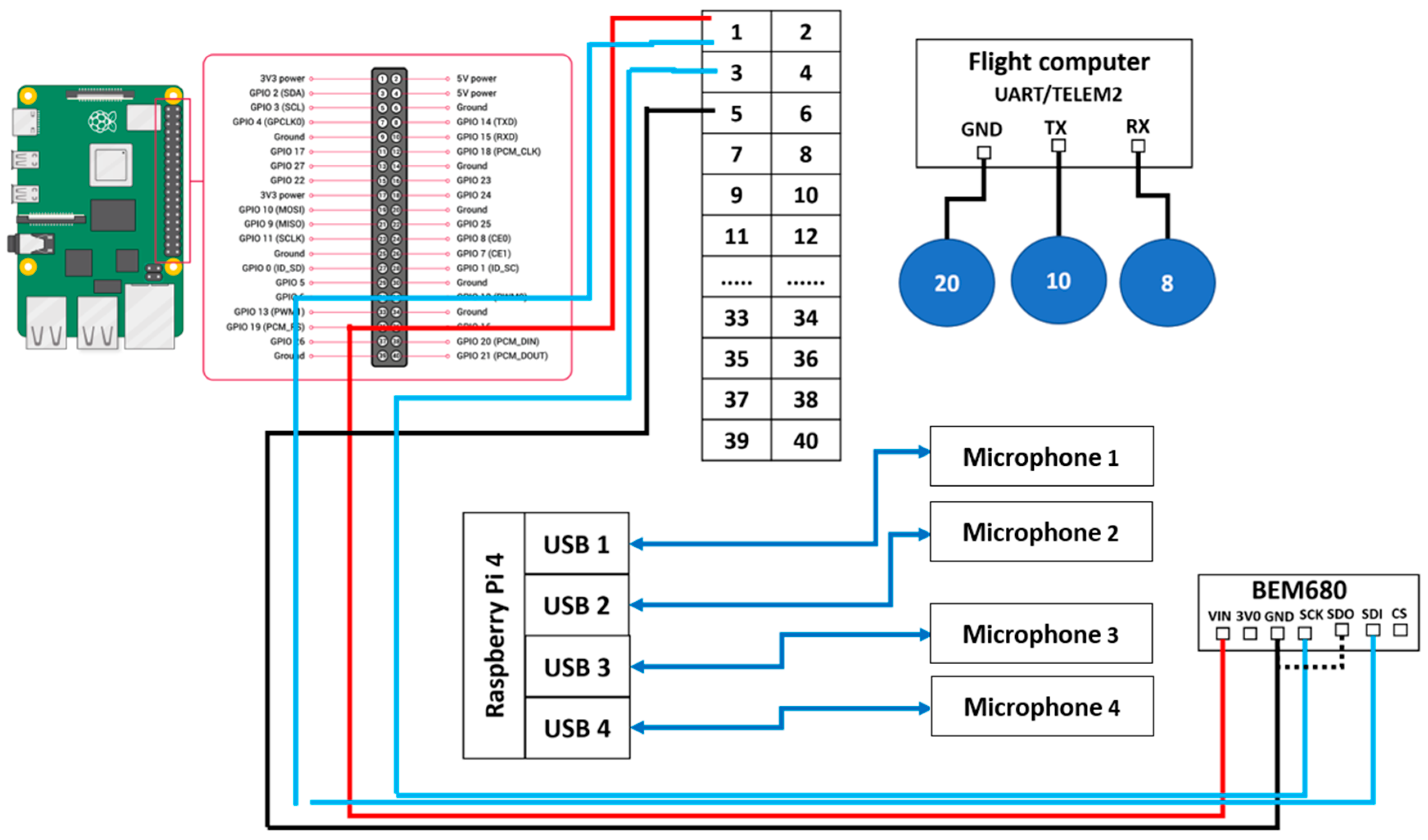
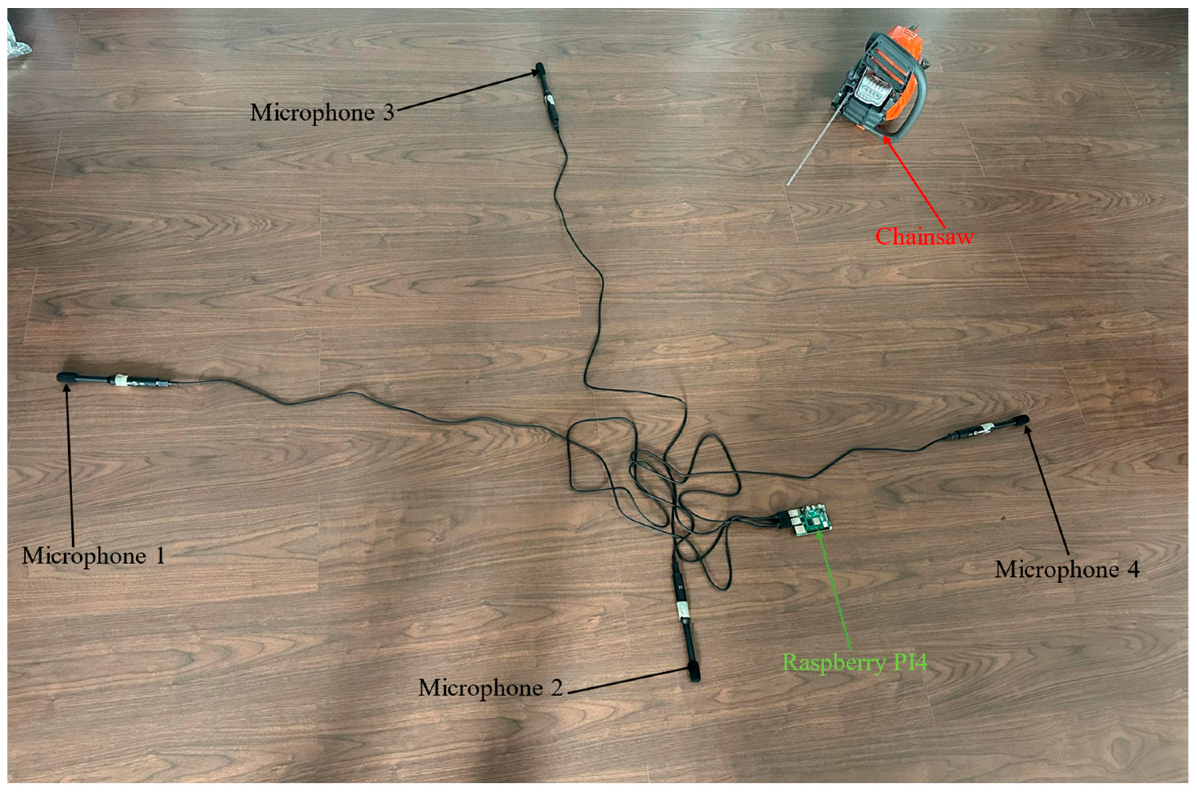
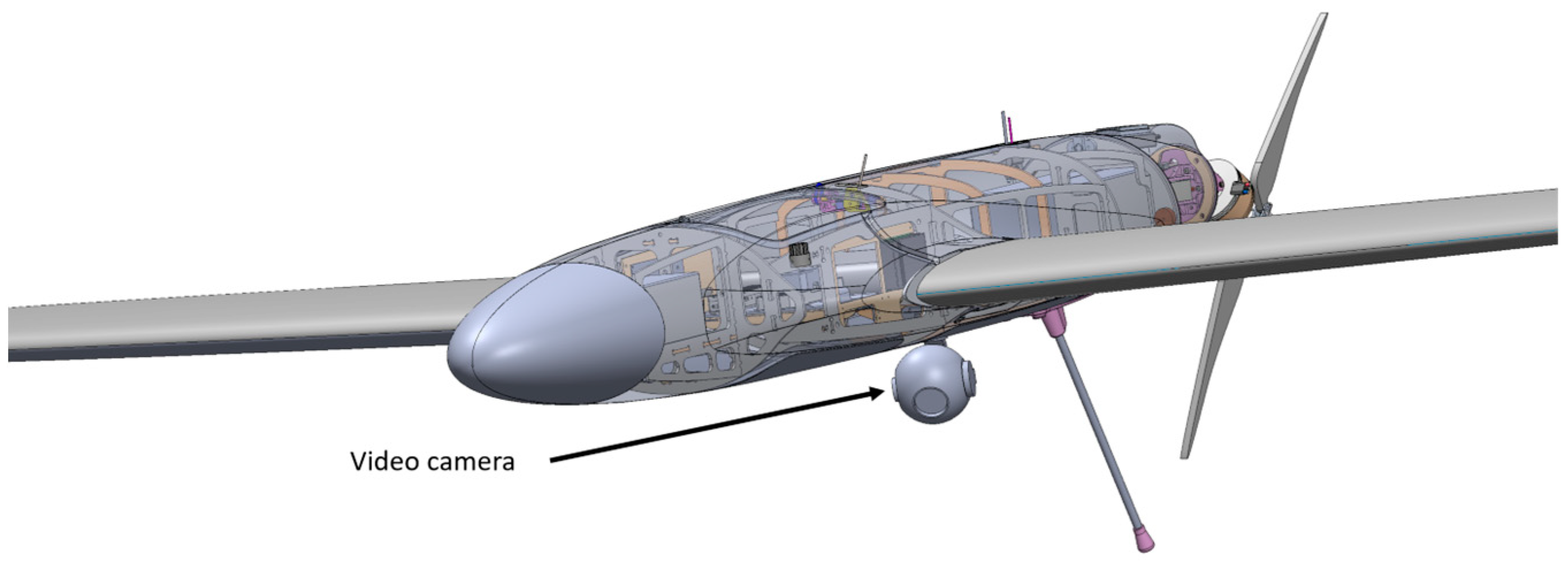
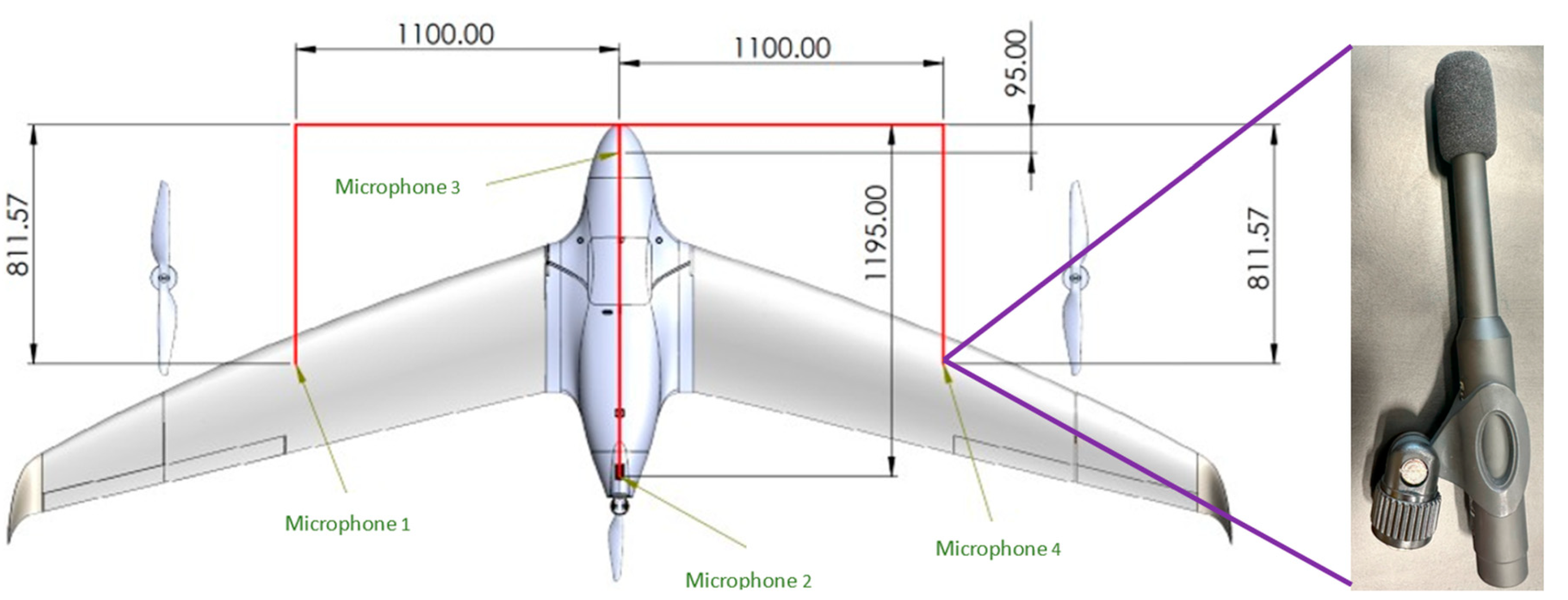
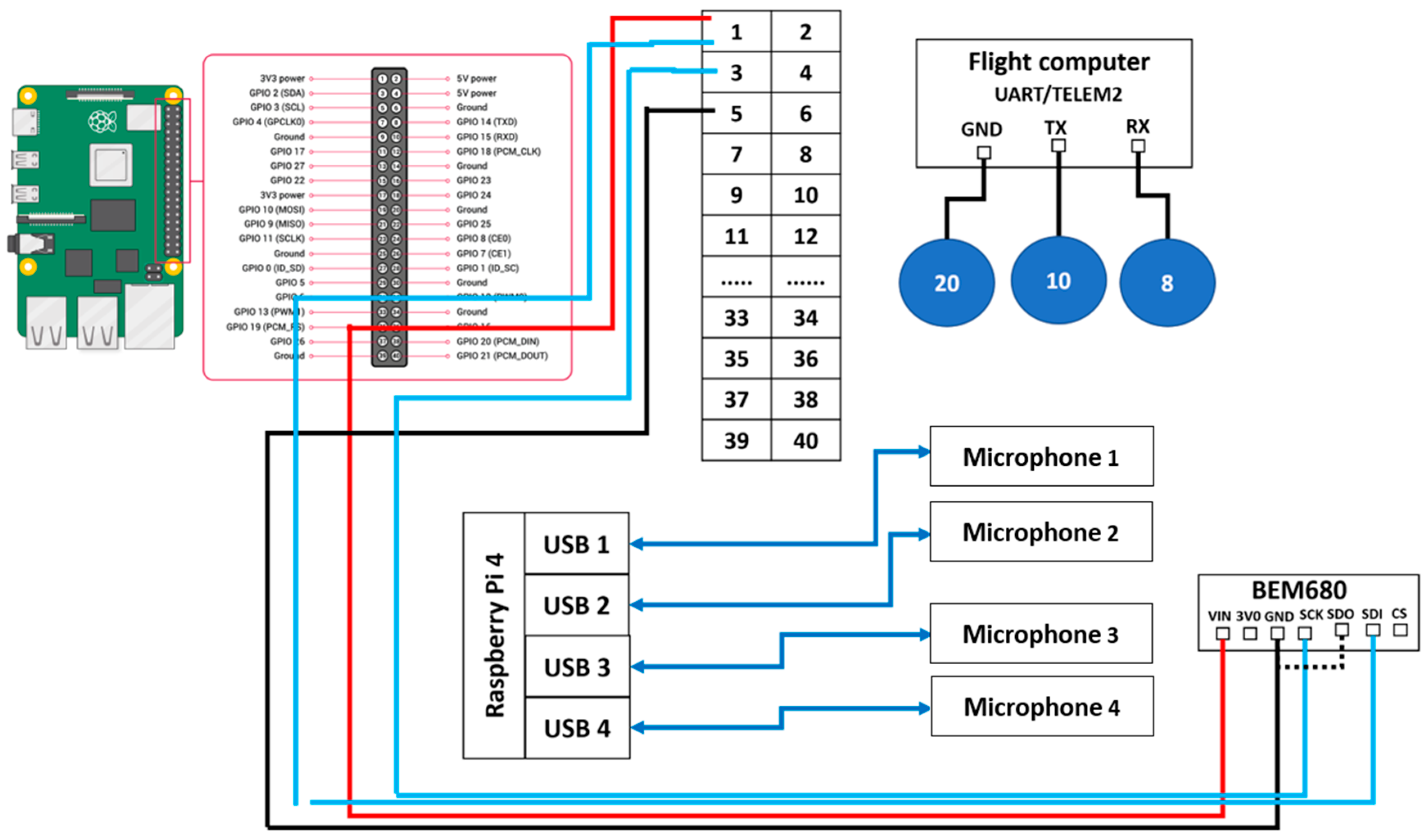
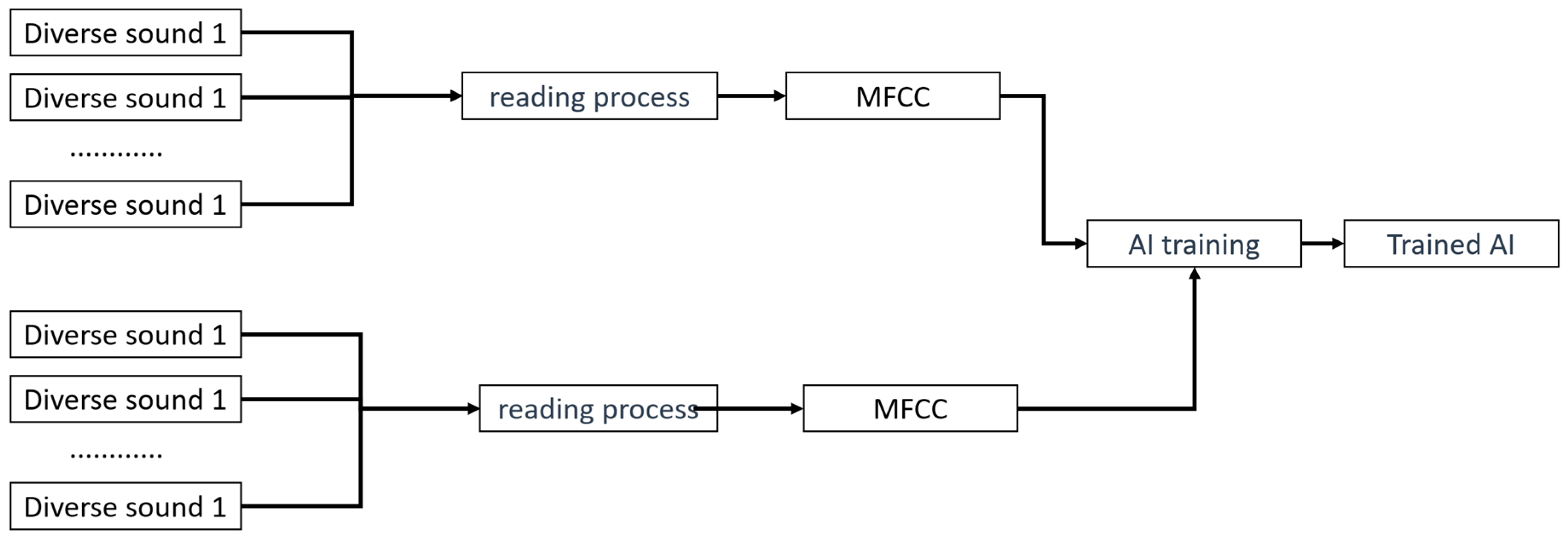
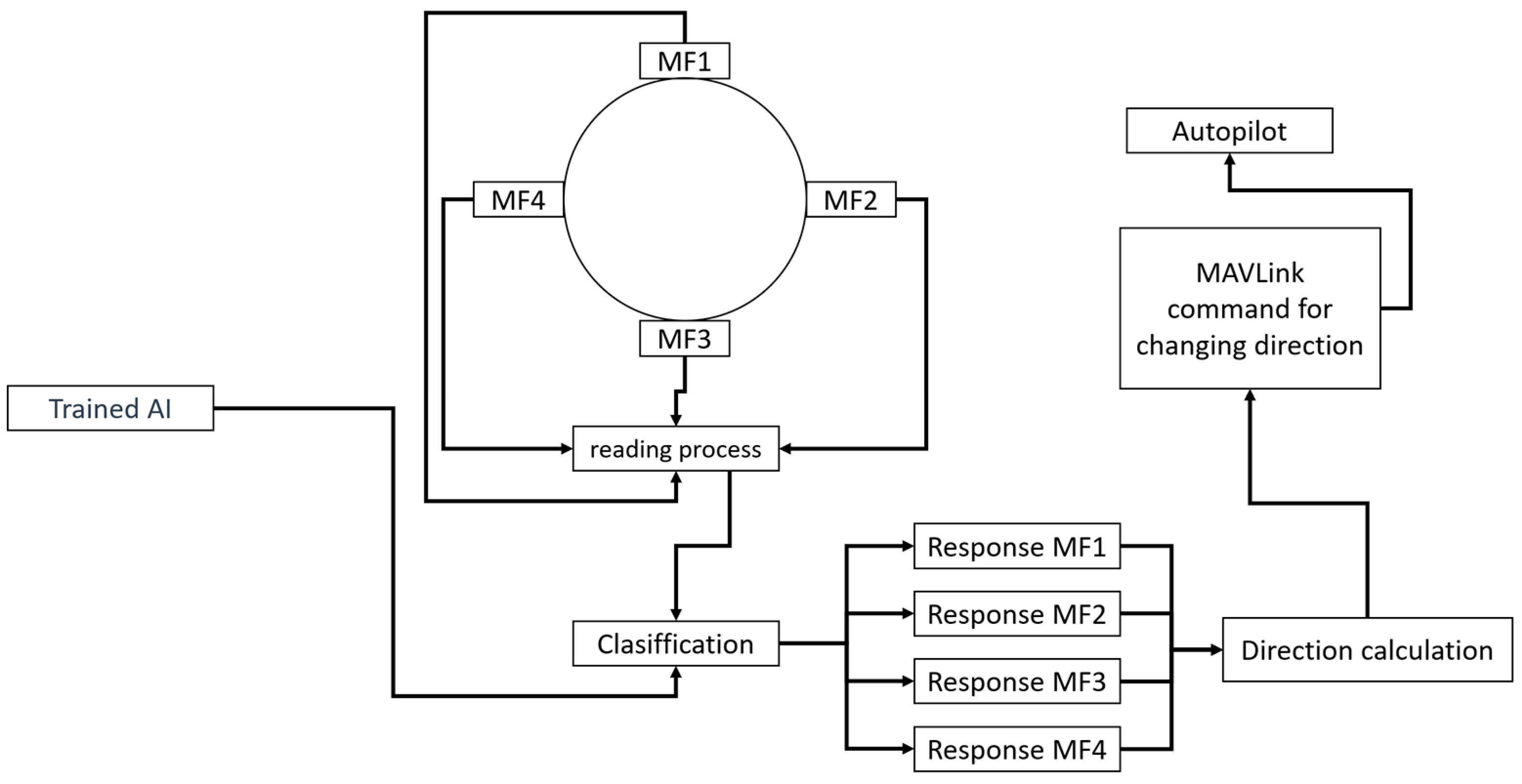
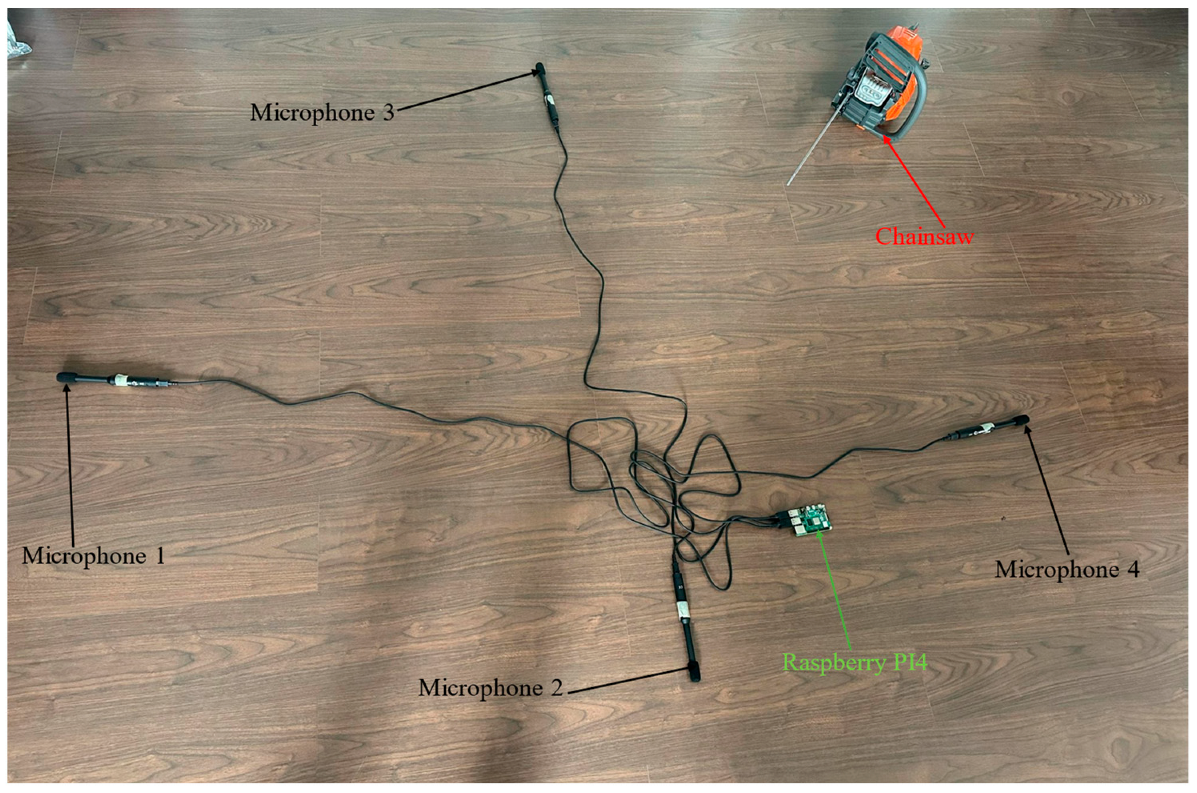
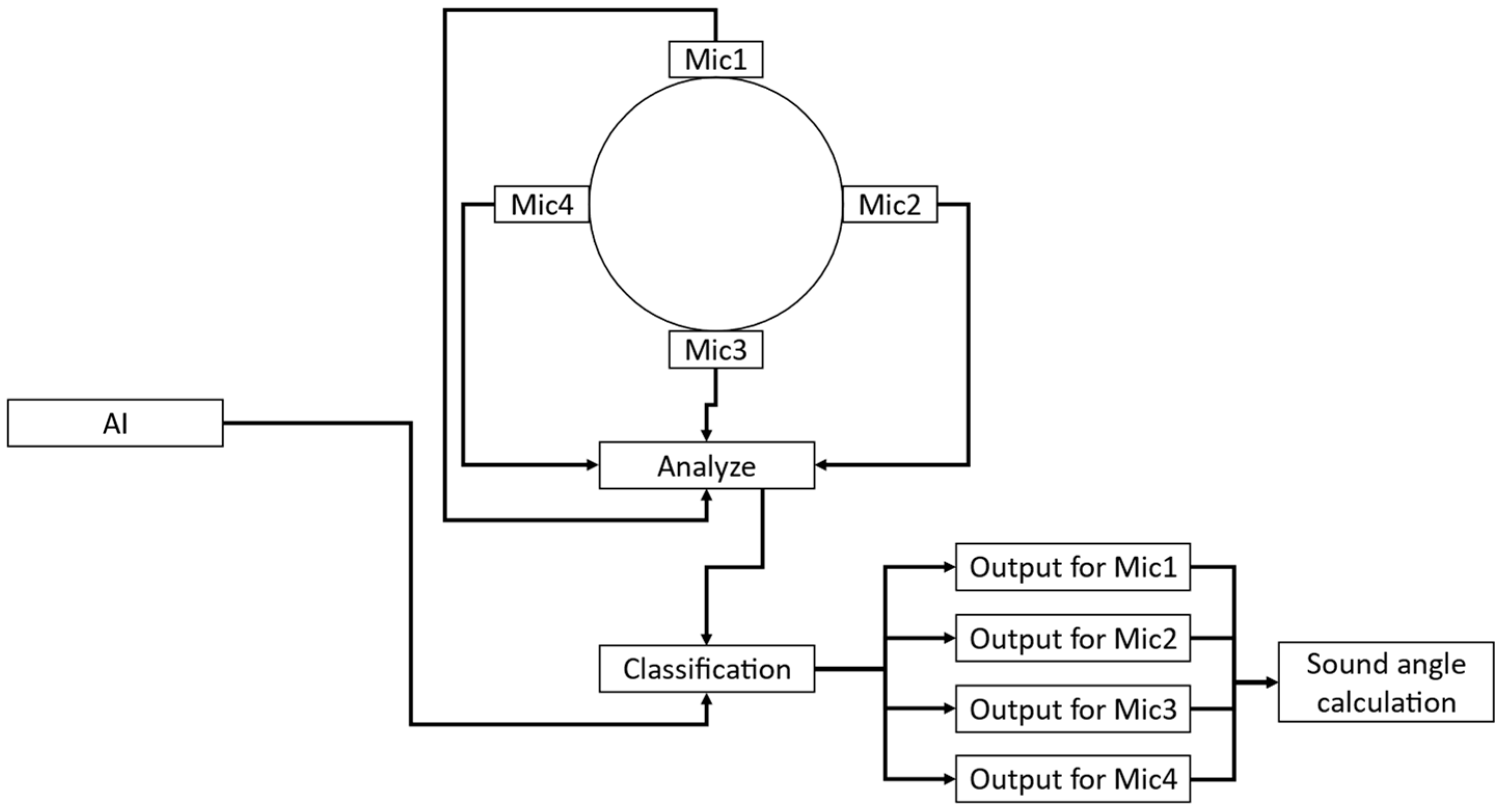
3.4. Acoustic System of the Drone
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shakoor, S.; Kaleem, Z.; Baig, M.I.; Chughtai, O.; Duong, T.Q.; Nguyen, L.D. Role of UAVs in Public Safety Communications: Energy Efficiency Perspective. IEEE Access 2019, 7, 140665–140679. [Google Scholar] [CrossRef]
- Adoni, W.Y.H.; Lorenz, S.; Fareedh, J.S.; Gloaguen, R.; Bussmann, M. Investigation of Autonomous Multi-UAV Systems for Target Detection in Distributed Environment: Current Developments and Open Challenges. Drones 2023, 7, 263. [Google Scholar] [CrossRef]
- Thiele, S.T.; Varley, N.; James, M.R. Thermal photogrammetric imaging: A new technique for monitoring dome eruptions. J. Volcanol. Geotherm. Res. 2017, 337, 140–145. [Google Scholar] [CrossRef]
- Caspari, G.; Sadykov, T.; Blochin, J.; Buess, M.; Nieberle, M.; Balz, T. Integrating Remote Sensing and Geophysics for Exploring Early Nomadic Funerary Architecture in the “Siberian Valley of the Kings”. Sensors 2019, 19, 3074. [Google Scholar] [CrossRef] [PubMed]
- Patel, M.; Bandopadhyay, A.; Ahmad, A. Collaborative Mapping of Archaeological Sites Using Multiple UAVs. In Proceedings of the Intelligent Autonomous Systems 16; Ang, M.H., Jr., Asama, H., Lin, W., Foong, S., Eds.; Lecture Notes in Networks and Systems; Springer International Publishing: Cham, Switzerland, 2022; pp. 54–70. [Google Scholar]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Goodrich, P.; Betancourt, O.; Arias, A.C.; Zohdi, T. Placement and drone flight path mapping of agricultural soil sensors using machine learning. Comput. Electron. Agric. 2023, 205, 107591. [Google Scholar] [CrossRef]
- Febria, J.; Dewi, C.; Mailoa, E. Comparison of Capacitated Vehicle Routing Problem Using Initial Route and Without Initial Route for Pharmaceuticals Distribution. In Proceedings of the 2021 2nd International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 23–25 September 2021; pp. 94–98. [Google Scholar]
- Loianno, G.; Kumar, V. Cooperative Transportation Using Small Quadrotors Using Monocular Vision and Inertial Sensing. IEEE Robot. Autom. Lett. 2018, 3, 680–687. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Stan, A.C. A decentralised control method for unknown environment exploration using Turtlebot 3 multi-robot system. In Proceedings of the 2022 14th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Ploiesti, Romania, 30 June–1 July 2022; pp. 1–6. [Google Scholar]
- Hafeez, A.; Tiwari, V.; Verma, V.K.; Ansari, A.S.; Husain, M.A.; Singh, S.; Khan, A.N. Crop Monitoring and Automatic Weed Detection using Drone. In Proceedings of the 2021 International Conference on Control, Automation, Power and Signal Processing (CAPS), Jabalpur, India, 10–12 December 2021; pp. 1–4. [Google Scholar]
- Anghelache, D.; Persu, C.; Dumitru, D.; Bălţatu, C. Intelligent Monitoring of Diseased Plants Using Drones. Ann. Univ. Craiova Agric. Mont. Cadastre Ser. 2021, 51, 146–151. [Google Scholar] [CrossRef]
- Supriya, C.; Murali Arthanari, P.; Kumaraperumal, R.; Sivamurugan, A. Optimization of Spray Fluid for Herbicide Application for Drones in Irrigated Maize (Zea mays L.). Agric. Food Sci. 2021, 33, 137–145. [Google Scholar] [CrossRef]
- Brahmanand, P.; Singh, A.K. Precision Irrigation Water Management-Current Status, Scope and Challenges. Indian J. Fertil. 2022, 18, 372–380. [Google Scholar]
- Stone, Z.; Parker, K.A. Unmanned aerial vehicle (UAV) activity elicits little to no response from New Zealand forest birds during wildlife monitoring. Notornis 2022, 69, 25–119. [Google Scholar]
- Ivanova, S.; Prosekov, A.; Kaledin, A. A Survey on Monitoring of Wild Animals during Fires Using Drones. Fire 2022, 5, 60. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.J.; Tiede, D.; Seifert, T. UAV-based forest health monitoring: A systematic review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Cillero Castro, C.; Dominguez Gomez, J.A.; Delgado Martin, J.; Hinojo Sanchez, B.A.; Cereijo Arango, J.L.; Cheda Tuya, F.A.; Diaz-Varela, R. An UAV and Satellite Multispectral Data Approach to Monitor Water Quality in Small Reservoirs. Remote Sens. 2020, 12, 1514. [Google Scholar] [CrossRef]
- Hemamalini, R.R.; Vinodhini, R.; Shanthini, B.; Partheeban, P.; Charumathy, M.; Cornelius, K. Air quality monitoring and forecasting using smart drones and recurrent neural network for sustainable development in Chennai city. Sustain. Cities Soc. 2022, 85, 104077. [Google Scholar] [CrossRef]
- Heupel, M.R.; Lédée, E.J.; Simpfendorfer, C.A. Telemetry reveals spatial separation of co-occurring reef sharks. Mar. Ecol. Prog. Ser. 2018, 589, 179–192. [Google Scholar] [CrossRef]
- Taddia, Y.; Pellegrinelli, A.; Corbau, C.; Franchi, G.; Staver, L.W.; Stevenson, J.C.; Nardin, W. High-resolution monitoring of tidal systems using UAV: A case study on Poplar Island, MD (USA). Remote Sens. 2021, 13, 1364. [Google Scholar] [CrossRef]
- Casana, J.; Laugier, E.J.; Hill, A.C.; Reese, K.M.; Ferwerda, C.; McCoy, M.D.; Ladefoged, T. Exploring archaeological landscapes using drone-acquired lidar: Case studies from Hawaii, Colorado, and New Hampshire, USA. J. Archaeol. Sci. Rep. 2021, 39, 103133. [Google Scholar] [CrossRef]
- Roiha, J.; Heinaro, E.; Holopainen, M. The Hidden Cairns—A Case Study of Drone-Based ALS as an Archaeological Site Survey Method. Remote Sens. 2021, 13, 2010. [Google Scholar] [CrossRef]
- Nath, N.D.; Cheng, C.S.; Behzadan, A.H. Drone mapping of damage information in GPS-Denied disaster sites. Adv. Eng. Inform. 2022, 51, 101450. [Google Scholar] [CrossRef]
- Daud, S.M.S.M.; Yusof, M.Y.P.M.; Heo, C.C.; Khoo, L.S.; Singh, M.K.C.; Mahmood, M.S.; Nawawi, H. Applications of drone in disaster management: A scoping review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Munawar, H.S.; Hammad, A.W.; Waller, S.T. Disaster Region Coverage Using Drones: Maximum Area Coverage and Minimum Resource Utilisation. Drones 2022, 6, 96. [Google Scholar] [CrossRef]
- Munawar, H.S.; Gharineiat, Z.; Akram, J.; Imran Khan, S. A Framework for Burnt Area Mapping and Evacuation Problem Using Aerial Imagery Analysis. Fire 2022, 5, 122. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Wang, H.; Sun, W.; Zhao, C.; Zhang, S.; Han, J. Dynamic Modeling and Control for Tilt-Rotor UAV Based on 3D Flow Field Transient CFD. Drones 2022, 6, 338. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, Y.; Lin, C. Modeling and control for the mode transition of a novel tilt-wing UAV. Aerosp. Sci. Technol. 2019, 91, 593–606. [Google Scholar] [CrossRef]
- Li, W.; Hsu, C.-Y. GeoAI for Large-Scale Image Analysis and Machine Vision: Recent Progress of Artificial Intelligence in Geography. ISPRS Int. J. Geo-Inf. 2022, 11, 385. [Google Scholar] [CrossRef]
- Oguntoye, K.S.; Laflamme, S.; Sturgill, R.; Eisenmann, D.J. Review of Artificial Intelligence Applications for Virtual Sensing of Underground Utilities. Sensors 2023, 23, 4367. [Google Scholar] [CrossRef]
- Zinno, R.; Haghshenas, S.S.; Guido, G.; Rashvand, K.; Vitale, A.; Sarhadi, A. The State of the Art of Artificial Intelligence Approaches and New Technologies in Structural Health Monitoring of Bridges. Appl. Sci. 2023, 13, 97. [Google Scholar] [CrossRef]
- Fumio Machida, Ermeson Andrade, Modeling and Analysis of Deforestation Prevention by Uncrewed Aerial Vehicles-based monitoring systems. Environ. Model. Softw. 2022, 158, 105540. [CrossRef]
- Ibraheem, M.K.I.; Mohamed, M.B.; Fakhfakh, A. Forest Defender Fusion System for Early Detection of Forest Fires. Computers 2024, 13, 36. [Google Scholar] [CrossRef]
- Paneque-Gálvez, J.; McCall, M.K.; Napoletano, B.M.; Wich, S.A.; Koh, L.P. Small Drones for Community-Based Forest Monitoring: An Assessment of Their Feasibility and Potential in Tropical Areas. Forests 2014, 5, 1481–1507. [Google Scholar] [CrossRef]
- Torres, V.A.; Jaimes, B.R.; Ribeiro, E.S.; Braga, M.T.; Shiguemori, E.H.; Velho, H.F.; Torres, L.C.B.; Braga, A.P. Combined weightless neural network FPGA architecture for deforestation surveillance and visual navigation of UAVs. Eng. Appl. Artif. Intell. 2020, 87, 103227. [Google Scholar] [CrossRef]
- Lopez-Sanchez, I.; Moreno-Valenzuela, J. PID control of quadrotor UAVs: A survey. Annu. Rev. Control 2023, 56, 100900. [Google Scholar] [CrossRef]
- Ozkan, D.; Gok, M.S.; Karaoglanli, A.C. Carbon Fiber Reinforced Polymer (CFRP) Composite Materials, Their Characteristic Properties, Industrial Application Areas and Their Machinability. In Engineering Design Applications III: Structures, Materials and Processes; Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Chowdhury, N.; Faysal, G.M.; Islam, T.; Rahman, H.; Yeasmin, F. A Study on Mechanical Properties of Carbon Fiber Reinforced Polymer Composite. In Proceedings of the International Conference on Materials, Energy, Environment, and Engineering, Dhaka, Bangladesh, 29–30 November 2020. [Google Scholar]
- Available online: https://www.skyfilabs.com/project-ideas/fabrication-of-glass-hybrid-fiber-epoxy-composite-material-using-hand-layup-mathod (accessed on 1 March 2024).
- Available online: https://www.hifiberry.com/blog/measurement-microphones/ (accessed on 1 March 2024).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
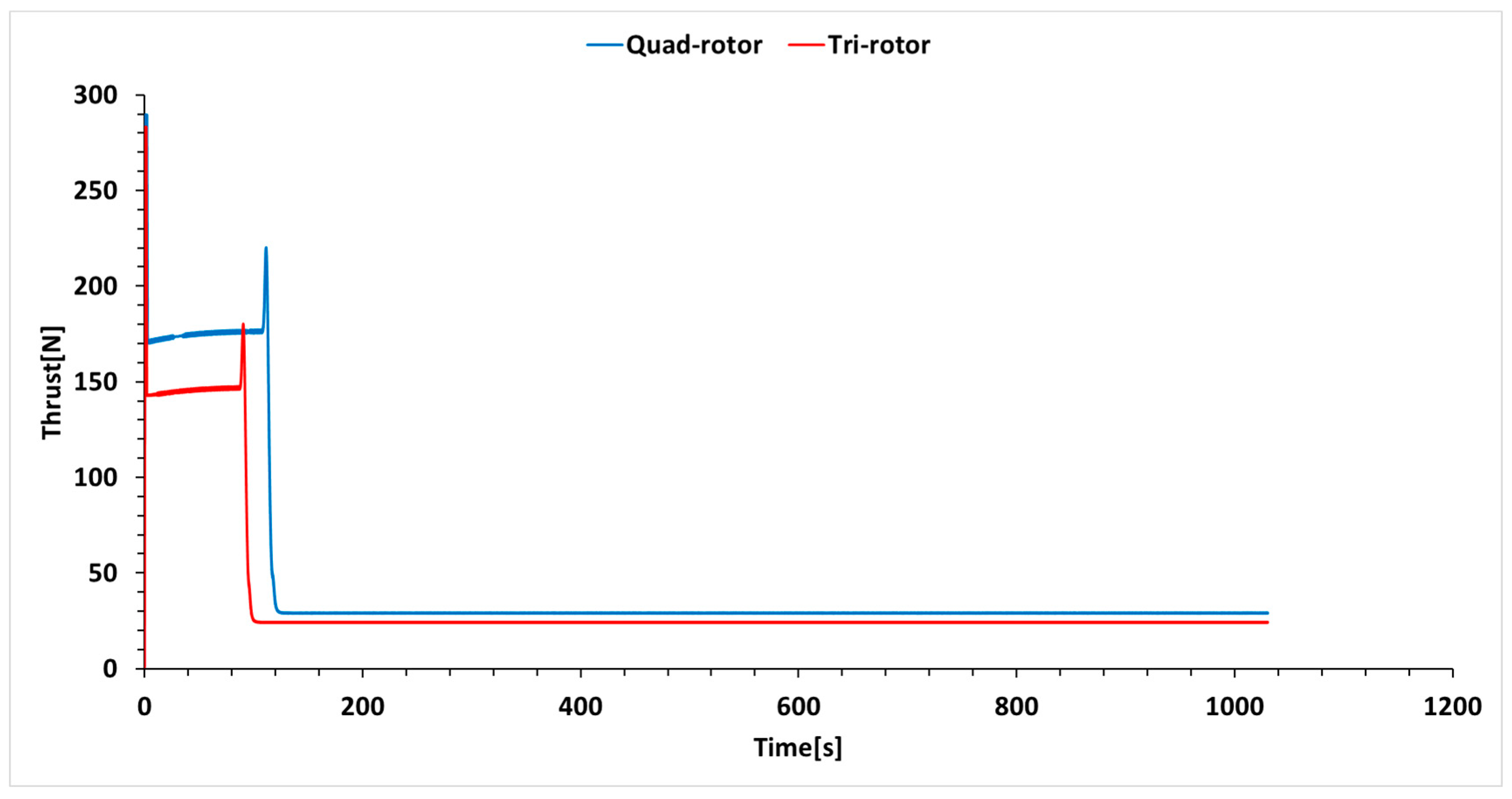
| Tri-Rotor System | Quad-Rotor System |
|---|---|
|
|
| Tri-Rotor System | Quad-Rotor System |
|---|---|
| Route Completion Time: 18.28 min Energy Consumption Ah: 1.6582″ | Route Completion Time: 17.17 min Energy Consumption Ah: 1.8272″ |
| Distant Y [mm] | Chord Length [mm] | Offset [mm] | Dihedral Angle [°] | Twist Angle [°] |
|---|---|---|---|---|
| 0 | 615.5 | 0 | 0 | 0 |
| 250 | 500 | 115.5 | 0 | 0 |
| 1143 | 390 | 430 | 0 | −0.5 |
| 1950 | 200 | 815 | 30 | −1 |
| 1990 | 180 | 860 | 60 | −1 |
| 2030 | 160 | 910 | 90 | 0 |
| 2280 | 60 | 1067.5 | 2 |
| Equipment Type | Description | Mass [g] |
|---|---|---|
| MN805-S KV170 | Voltage: 6-12S, maximum power: 4000 W | 625 |
| FLAME 100A 14S | Continuous maximum current: 100 A; voltage: 6-14S | 139 |
| Servo motor BLS-5404H | Voltage: 4.8–8.4 V; torque at 8.4 V: 50.9 kg·cm; speed at 8.4 V: 0.11 s/60°; current: 9.1 A at 8.4 V | 77.5 |
| Servo motor HV-5101 | Voltage: 4.8–8.4 V; torque at 8.4 V: 6.8 kg·cm; speed at 8.4 V: 0.10 s/60°; current: 0.645 A at 8.4 V | 18 |
| Orange Cube | Autopilot | 73 |
| Herelink v1.1 | Encrypted transmission system; range: 20 km; resolution: full HD; frequency: 2.4 GH | 95 |
| Hobbywing UBEC 25A | Input: 3S–18S; output: 5.2/6/7.4/8.4 V; current: 25 A. | 74 |
| HOLYBRO Power Module-PM06 V2-14S Power Module | Output: 5 V; input: 2S–14S; current: 60 A | 24 |
| Raspberry Pi 4 | For acoustic system control and reading meteorological sensor | |
| BME680 | Meteorological sensor for temperature, humidity, barometric pressure, and VOC (volatile organic compound) gas | 3 |
| ZR10 Video camera | Voltage: 3–4 S; 10× optical zoom (30× hybrid zoom); resolution: 2 k; control: S.bus/PPM/UART/UDP; video output: Ethernet; power consumption: 3 W with 3-axis GIMBAL | 381 |
| HERE3+ GPS Antenna | For GPS signal | 51.8 |
| Name | Mass [g] | Number | Total Mass [g] |
|---|---|---|---|
| Winglet + semi-wing | 368.5 | 2 | 737 |
| Wing | 1351 | 2 | 2702 |
| Fuselage | 2247.3 | 1 | 2247.3 |
| Landing gear | 27.2 | 3 | 81.6 |
| Electronics | 1000 | 1 | 1000 |
| Motor | 625 | 3 | 1875 |
| Propeller | 110 | 3 | 330 |
| ESC | 139 | 3 | 417 |
| Vectorization servo | 77 | 3 | 231 |
| Control surface servo | 18 | 4 | 72 |
| Video camera | 381 | 1 | 381 |
| Acoustic system | 500 | 1 | 500 |
| Flight controller (FC) | 73 | 1 | 73 |
| Airunit | 95 | 1 | 95 |
| Front motor mounting system | 334.6 | 1 | 334.6 |
| Dorsal motor mounting system | 194 | 1 | 194 |
| Battery | 2200 | 2 | 4400 |
| Total | 15,670.5 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badea, G.P.; Frigioescu, T.F.; Dombrovschi, M.; Cican, G.; Dima, M.; Anghel, V.; Crunteanu, D.E. Innovative Hybrid UAV Design, Development, and Manufacture for Forest Preservation and Acoustic Surveillance. Inventions 2024, 9, 39. https://doi.org/10.3390/inventions9020039
Badea GP, Frigioescu TF, Dombrovschi M, Cican G, Dima M, Anghel V, Crunteanu DE. Innovative Hybrid UAV Design, Development, and Manufacture for Forest Preservation and Acoustic Surveillance. Inventions. 2024; 9(2):39. https://doi.org/10.3390/inventions9020039
Chicago/Turabian StyleBadea, Gabriel Petre, Tiberius Florian Frigioescu, Madalin Dombrovschi, Grigore Cican, Marius Dima, Victoras Anghel, and Daniel Eugeniu Crunteanu. 2024. "Innovative Hybrid UAV Design, Development, and Manufacture for Forest Preservation and Acoustic Surveillance" Inventions 9, no. 2: 39. https://doi.org/10.3390/inventions9020039
APA StyleBadea, G. P., Frigioescu, T. F., Dombrovschi, M., Cican, G., Dima, M., Anghel, V., & Crunteanu, D. E. (2024). Innovative Hybrid UAV Design, Development, and Manufacture for Forest Preservation and Acoustic Surveillance. Inventions, 9(2), 39. https://doi.org/10.3390/inventions9020039