IK produce considerable amounts of waste. Yet, in contrast to other smart city application domains that have seen considerable research in waste management (e.g., [
1,
2,
3,
4,
5,
6,
7,
8,
9]), very little attention has been devoted to the operation of IK (e.g., [
10,
11]).
The FIK project (see
https://futurekitchen.m-iti.org/—accessed on 25 February 2021) was performed in Portuguese luxury hotels and the food preparation sector with the strategic aim to develop a next-generation IK concept utilizing IoT enabled interactive technologies, optimized appliance arrangements, and re-imagined spatial, lighting, and equipment layouts to maximize the workflow efficiency and pleasure of the operating staff. One of the main goals of the FIK project was to understand the interactions between the consumption of electricity and water and the generation of waste in such spaces. To this end, electricity, water, and waste monitoring technology were deployed in three restaurants for a consecutive period of four weeks [
12].
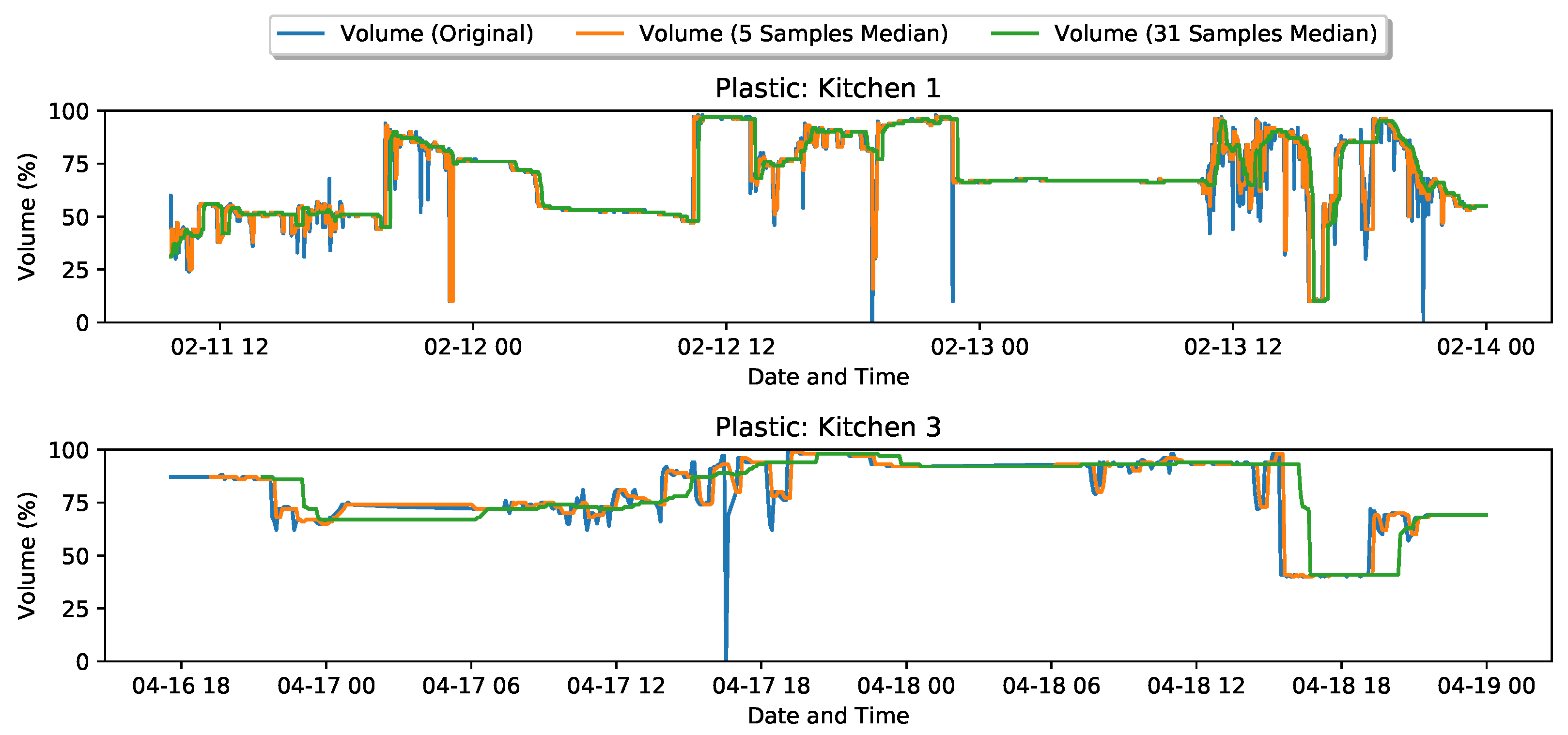
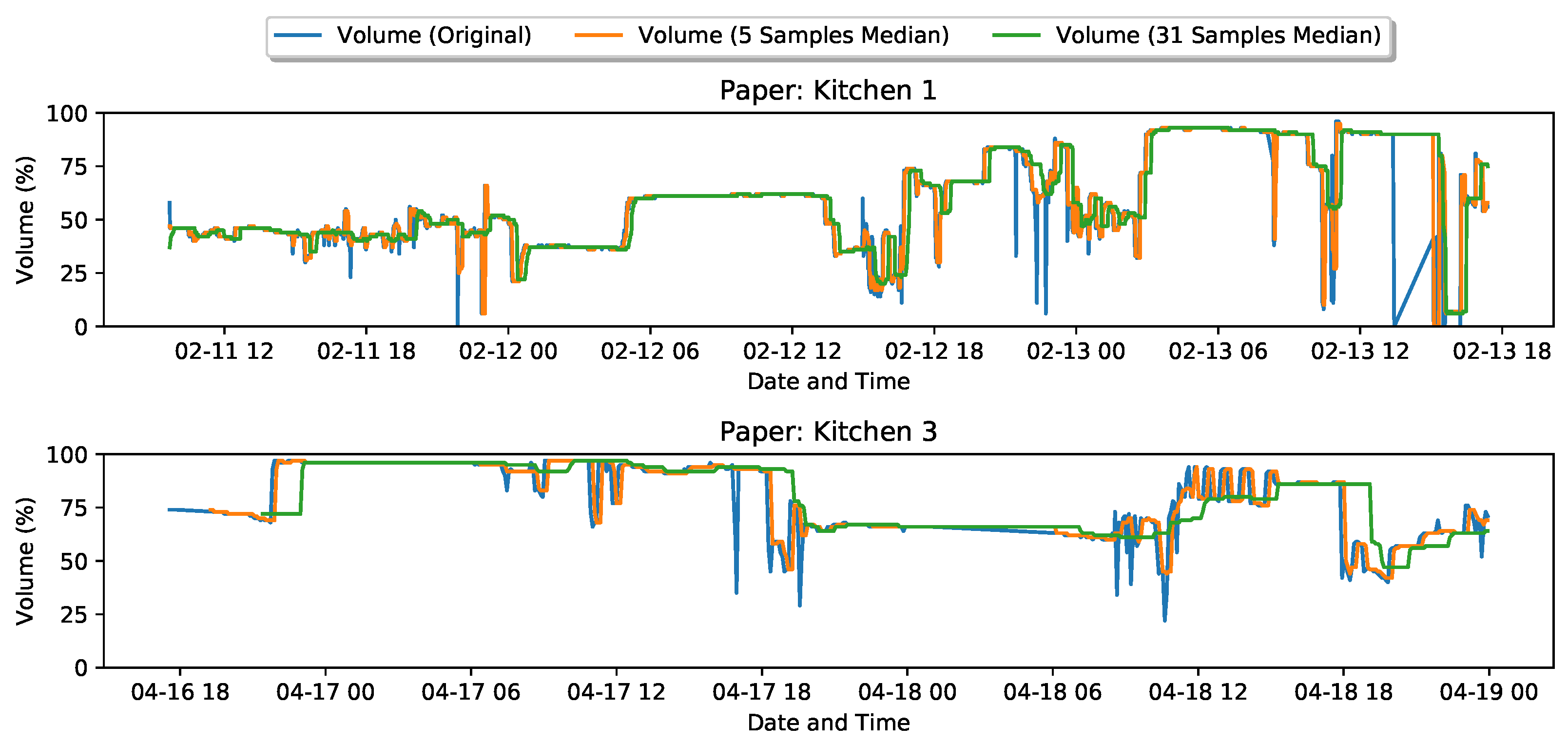
This data descriptor presents the data collected through the real-time monitoring of waste generation and waste bin disposal in the scope of this project. More precisely, organic (undifferentiated) and inorganic (glass, paper, and plastic) waste bins were monitored in three IK for a consecutive period of four weeks.
1.1. Relation to Prior Research
One of the most studied waste management research topics is the ability to automatically detect the fill level of waste bins, as this provides valuable inputs to various stakeholders (e.g., waste collection services, building managers, and even policymakers). Broadly speaking, the vast majority of the works on waste bin level detection can be divided into one of two categories: (1) image based (e.g., [
1,
2,
3]) and (2) distance based (e.g., [
4,
5,
7,
8]).
Image based approaches rely on sequences of overhead images of the waste bins and image processing algorithms. The most common algorithms are waste bin detection and waste bin level classification. The former aims at finding waste bins in new images, whereas the latter attempts to classify the waste level in the identified waste bins. Image based solutions provide very good performance, e.g., in [
2], the authors reported an average bin detection rate of 97.5% and a waste level classification rate of 99.4%. Nevertheless, such solutions are considerably expensive as they require capturing overhead images and heavy processing algorithms that generally need to run on the cloud or on the edge [
13].
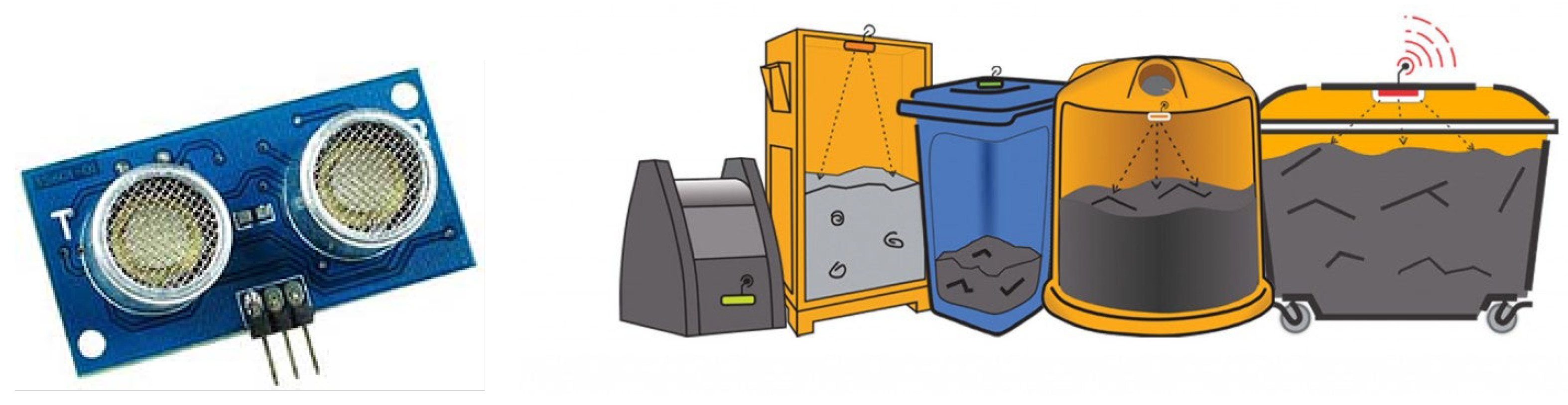
Distance based approaches provide a less expensive solution since they rely mostly on ultrasonic range sensors whose price can be as low and 1 to 40 Euros, depending on the required accuracy. Furthermore, these approaches rely mostly on signal processing algorithms applied to the measured distances’ time series, which can often run on embedded devices. Distance based solutions also provide very good accuracy values concerning distance measurements. For example, Reference [
5] reported an average deviation between manual and system readings of less than 1 cm, whereas in [
8], the authors reported a 2–3 cm accuracy. However, the main drawback of such solutions is that they rely on batteries to work. Therefore, it is necessary to find the right trade-off between the rate of measurements and the lifetime of the battery. In this regard, in [
8], the authors reported that by taking measurements every 15 min, the theoretical lifetime of their sensor node would be up to 500 days.
With respect to IK, the few existing works mainly focus on understanding how to reduce food waste. For example, the work in [
10] reported efforts to characterize the waste generated by a restaurant in a touristic area of Central Italy. The obtained results show that food alone (organic waste) is responsible for over 28% of the total waste generation. Another example is the work from Silvennoinen et al. [
11], where the authors monitored and studied food waste in 51 Finish food service outlets. According to this research, about 17.5% of the produced food ended up as waste.
Interestingly, while these two works relied heavily on the quantification of waste generation, they did not use any automatic monitoring strategies. Instead, the amounts of generated waste were monitored following manual processes that relied on report cards. For instance, in [
11], the participants had to produce daily reports of the amounts of food prepared, kitchen waste, serving waste, customer leftovers, and the number of customers. While none of these works reported the reasons for using manual strategies, this is possibly due to the lack of reliable solutions for that effect. Thus, it is fair to assume that further research in automatic waste monitoring is necessary, particularly in industrial contexts such as IK.
1.2. Relation to Prior Datasets
A typical dataset for image based approaches would consist of labeled waste bin images. More precisely, at least two labels would be necessary: (1) the position of the waste bin (for detection algorithms) and (2) the fill level (for waste-level classification). In contrast, a typical dataset for distance based approaches would consist of time series measurements of the distances measured by the sensor and the corresponding volume represented. Since the fill levels are obtained directly from the measurements, it is not mandatory to have labels with the waste levels.
Although several research works exist in the field of waste management, to the best of our knowledge, there are not many publicly available datasets. This situation contrasts other fields that have seen enormous efforts to release public datasets in the previous years, e.g., electricity [
14] and water [
15].
A search on the data world website (see
https://data.world/—accessed on 20 January 2021) for the keywords “waste”, “bin”, and “industrial” returned 95, 3, and 2 results, respectively. From these, none contained the keywords “restaurant” and “kitchen”. In contrast, the keyword “household” was associated with ten datasets. We thus believe that FIKWaste represents a very good and unique contribution to the waste monitoring and management research field as concerns distance based approaches since this was the methodology used in the FIK project.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}