
Comparing Depth-Integrated Models to Compute Overland Flow in Steep-Sloped Watersheds


Abstract
1. Introduction
2. Hydrodynamic Models
- The DWEs approximate the flow and achieve an increased solution speed but sacrifice the ability to capture detailed turbulent flow.
- 2.
3. Methods
3.1. Hypothetical Watershed
3.1.1. Model Geometry
3.1.2. Roughness
3.1.3. Obstructions
3.1.4. Mesh Distribution
3.1.5. Boundary Conditions
3.2. Modeling Scenarios
- Basic: solutions 1, 2, and 3 examined the impact of the different governing equations on overland flow outputs, comparing the DWE (Equation (2)), SWE (Equation (1)), and LIA (Equation (3)).
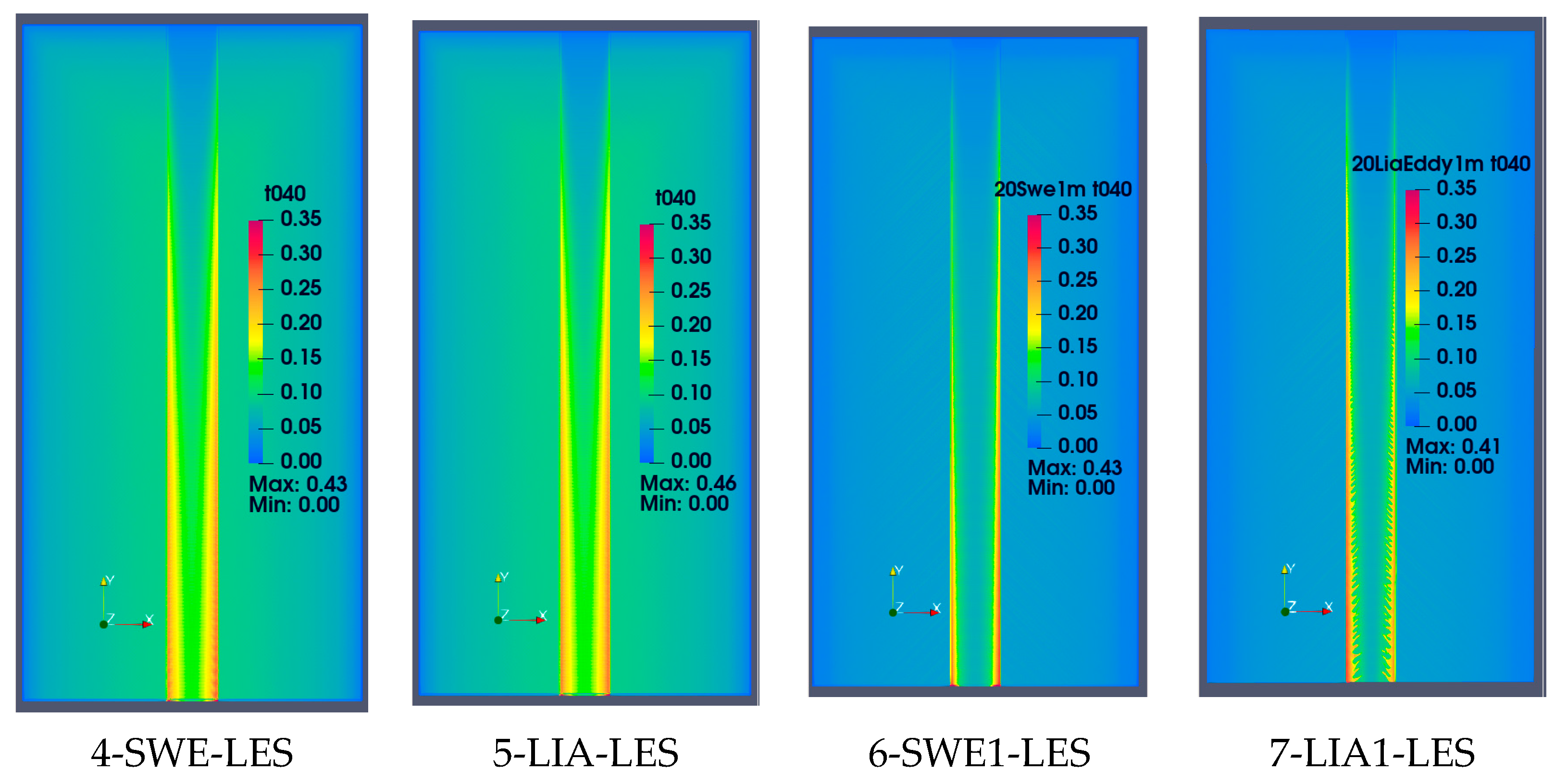
- LES and Cell Size: solutions 4, 5, 6, and 7 investigated how using Large Eddy Simulation (SWE+LES, Equation (5); LIA+LES Equation (6)) affected the flow simulations across different grid sizes (2 × 2 m and 1 × 1 m).
- Obstacles: the third analysis (solutions 8, 9, 10, and 11) focused on the role of physical obstacles on overland flow behavior, with or without turbulence.
3.3. Time Steps and Conditions for Stability
3.4. Critical Parameters for Flow and Error Determination
- Outflow time series along the lower boundary at 1 min intervals.
- Water depth over the entire watershed at 1 min intervals, totaling 180.
- Froude number maximum value during flow period.
- Turbulence as maximum Reynolds number during flow period
- Overall outflow volume error based on outflow time series
3.4.1. Outflow Time Series
3.4.2. Water Depth
3.4.3. Froude Number
- How do the three equations behave with different Fr distributions?
- If a solution produced a less accurate outflow time series, would it also produce less accurate Fr distributions?
- How does the LIA solution perform under various flow regimes, and does LES refine the results?
3.4.4. Reynolds Number for Shallow Flow
3.4.5. Volume Error
3.4.6. Errors, Computation Speed, and Solution Reliability
4. Results
4.1. Outflow Time Series
4.1.1. Basic
4.1.2. LES and Scale
4.1.3. Obstacles
4.2. Water Depth Contours
4.2.1. Basic
4.2.2. LES and Scale
4.2.3. Obstacles
4.3. Froude Number Distribution
- Since low Fr numbers would only appear locally around obstructions, most flow is supercritical. The research above [30] stated that the LIA solutions work better in low Fr domains. However, their accuracy and stability remain uncertain under scattered sub- and supercritical conditions.
- Other studies have shown that the LIA solutions can produce an outflow time series similar to SWEs [40,41]. However, the Fr value plays a vital role in drag force and erosion. Analyses would require the Fr distribution throughout the watershed to understand drag force and erosion susceptibility better. With a detailed knowledge of the Fr distribution, the modeler could better examine the stability and accuracy of LIA solutions throughout the watershed (e.g., wave-like formations caused by the jumps from cell to cell).
4.3.1. Basic
4.3.2. LES and Scale
4.3.3. Obstructions
4.4. Reynolds Number Distribution
4.4.1. Basic
4.4.2. LES and Scale
4.4.3. Obstacles
5. Discussion
Outflow Time Series, Peak Flows, and Volume Errors
6. Conclusions
- Infiltration Losses: depend on the infiltration model and are linked to the mesh.
- Additional Losses: canopy interception, forest floor debris [42], and other localized features may disrupt surface flow processes in the watershed.
- Effects of Structures: culverts, bridges, and natural obstructions in the creek bed or watershed can significantly alter turbulent flow.
- Higher Depth and Flow Rates: when flow rates increase they may introduce further volume errors as flow behavior changes [43].
- Variability in Rainfall Events: modeling actual rainfall events introduces changes in incoming flow, which can lead to local instabilities.
- Outflow Time Series: a comparison of the peak timing and peak flow and the identification of numerical errors that may appear in the rising and falling limbs.
- Distribution of Hydraulic Depth: Mapping the water depths over time highlighted the changing distribution of water throughout the watershed. The locations where instabilities may occur became evident. The impact of obstructions on overall flow patterns also became more apparent.
- Froude Number: Useful in overland flow, mainly where supercritical flow and minor turbulence occur. The Froude number reflected drag force, indicating potential erosion.
- Reynolds Number: Critical in sheet flow where values should ideally be Re < 500 in plains. Turbulence around creek beds and obstructions is also important to capture.
- Overall Volume Error: Summarizes errors from each solver method, ideally minimized. According to the HEC-RAS manual [source], the simulation logs warn if the volume error exceeds 4%. In ungauged watersheds, added model components can quickly increase these errors.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brunner, G. HEC-RAS, River Analysis System Hydraulic Reference Manual (Ver. 6.6). 2024. Available online: https://www.hec.usace.army.mil/confluence/rasdocs/ras1dtechref/latest (accessed on 12 March 2025).
- Garambois, P.A.; Larnier, K.; Roux, H.; Labat, D.; Dartus, D. Analysis of flash flood-triggering rainfall for a process-oriented hydrological model. Atmos. Res. 2014, 137, 14–24. [Google Scholar] [CrossRef]
- Blöschl, G.; Sivapalan, M.; Wagener, T.; Viglione, A.; Savenije, H. A data acquisition framework for predictions of runoff in ungauged basins. In Runoff Prediction in Ungauged Basins, Synthesis Across Processes, Places and Scales; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Huang, W.; Cao, Z.; Huang, M.; Duan, W.; Ni, Y.; Yang, W. A New Flash Flood Warning Scheme Based on Hydrodynam-ic Modelling. Water 2019, 11, 1221. [Google Scholar] [CrossRef]
- Wu, W.; Shields, F.D.; Bennet, S.; Wang, S.S.Y. A depth-averaged two-dimensional model for flow, sediment transport, and bed btopography in curved channels with riparian vegetation. Water Resour. Res. 2005, 41, W03015. [Google Scholar] [CrossRef]
- Huang, W.; Cao, Z.; Qi, W.; Pender, G.; Zhao, K. Full 2D Hydrodynamic Modelling of Rainfall-induced Flash Floods. J. Mt. Sci. 2015, 12, 1203–1218. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Ferraro, D.; Macchiona, F.; Petaccia, G. Performance of the New HEC-RAS Version 5 for 2-D Hydrodynamic-Based Rainfall-Runoff Simulations at Basin Scale: Comparison with a State-of-the Art Model. Water 2020, 12, 2326. [Google Scholar] [CrossRef]
- Ion, S.; Marinescu, D.; Cruceanu, S. Riemann Problem for Shallow Water Equation with Vegetation. An. St. Univ. Ovidius Constanta 2018, 26, 145–173. [Google Scholar] [CrossRef]
- Hromadka, T.V.; Rao, P. Application of Diffusion Hydrodynamic Model for Overland Flows. Open J. Fluid Dyn. 2019, 9, 334–345. [Google Scholar] [CrossRef]
- Mihu-Pintilie, A.; Cimpianu, C.I.; Stoleriu, C.C.; Pérez, M.N.; Paveluc, L.E. Using High-Density LiDAR Data and 2D Streamflow Hydraulic Modeling to Improve Urban Flood Hazard Maps: A HEC-RAS Multi-Scenario Approach. Water 2019, 11, 1832. [Google Scholar] [CrossRef]
- Rana, V.K.; Suryanarayana, T.M.V. Estimation of flood influencing characteristics of watershed and their impact on flooding in data-scarce region. Ann. Gis 2021, 27, 397–418. [Google Scholar] [CrossRef]
- Zhao, J.; Liang, Q. Novel variable reconstruction and friction term discretisation schemes for hydrodynamic model-ling of overland flow and surface water flooding. Adv. Water Resour. 2022, 163, 104187. [Google Scholar] [CrossRef]
- Costabile, P.; Constanzo, C.; Macchione, F. Numerical aspects in simulating overland flow events. In Proceedings of the First IAHR European Congress, Edinburgh, UK, 4–6 May 2010. [Google Scholar]
- Pokrajac, D. Depth-integrated Reynolds-averaged Navier–Stokes equations for shallow flows over rough permeable beds. J. Hydraul. Res. 2013, 51, 597–600. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Macchione, F.; Mercogliano, P. Two-dimensional model for overland flow simulations: A case study. Eur. Water 2012, 38, 13–23. [Google Scholar]
- Ámon, G.; Bene, K. Impact of different rainfall events on overland flow using a 2D hydrodynamical model on a steep-sloped watershed. In Proceedings of the EGU General Assembly 2023, Vienna, Austria, 24–28 April 2023. EGU23-9179. [Google Scholar] [CrossRef]
- Garcia-Lovella, Y.; Moya, I.H.; Rubio-Rodriguez, M.A.; Jayasuriya, J. Assessment of LES Dynamic Smagorinsky-Lilly model resolution for combustion engineering applications. DYNA 2023, 90, 95–104. [Google Scholar]
- Mehta, D.; Zhang, Y.; Van Zuijlen, A.; Bijl, H. Large Eddy Simulation with Energy-Conserving Schemes and the Sma-gorinsky Model: A Note on Accuracy and Computational Efficiency. Energies 2019, 12, 129. [Google Scholar] [CrossRef]
- Laurila, E.; Roenby, J.; Maakala, V.; Peltonen, P.; Kahila, H.; Vuorinen, V. Analysis of viscous fluid flow in a pressure-swirl atomizer using large-eddy simulation. Int. J. Multiph. Flow 2019, 113, 371–388. [Google Scholar]
- Jourabian, M.; Armenio, V. Large Eddy Simulation (LES) of Suspended Sediment Transport (SST) at a Laboratory Scale. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–21 July 2016. [Google Scholar]
- Almeida, G.A.M.; Bates, P.; Freer, J.E.; Souvignet, M. Improving the stability of a simple formulation of the shallow water equations for 2-D flood modeling. Water Resour. Res. 2012, 48, W05528. [Google Scholar] [CrossRef]
- Martins, R.; Leandro, J.; Chen, A.S.; Djordevic, S. A comparison of three dual drainage models: Shallow water vs local inertial vs diffusive wave. J. Hydroinform. 2017, 19, jh2017075. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Macchione, F. Comparative analysis of overland flow models using finite volume schemes. J. Hydroinform. 2012, 14, 122–135. [Google Scholar] [CrossRef]
- Ogden, F.L.; Julien, P.Y. Runoff Sensitivity to Temporal and Spatial Rainfall Variability at Runoff Plate and Small Basin Scale. Water Resour. Res. 1993, 29, 2589–2597. [Google Scholar]
- Xia, X.; Liang, Q.; Ming, X.; Hou, J. An efficient and stable hydrodynamic model with novel source term discretization schemes for overland flow and flood simulations. Water Resour. Res. 2017, 53, 3730–3759. [Google Scholar] [CrossRef]
- Sanchez, A. Advanced Parameters in HEC-RAS. 2022. Available online: https://www.hec.usace.army.mil/confluence/prospect/files/179605245/179605315/2/1711746389465/2.8+Advanced+Computation+Options.pdf (accessed on 14 January 2025).
- Sanchez, A. HEC-RAS 2D Turbulence Models: Approach, Equations, Coefficients. 2022. Available online: https://www.youtube.com/watch?v=ePVdhuwCpmQ (accessed on 22 January 2025).
- Ballesteros-Cánovas, J.A.; Galán, M.Á.E.; Bodoque, J.M.; Díez-Herrero, A.; Stoffel, M.; Gutiérrez-Pérez, I. Estimating flash flood discharge in an ungauged mountain catchment with 2D hydraulic models and dendrogeomorphic palaeostage indicators. Hydrol. Process. 2011, 25, 970–979. [Google Scholar]
- Paraview Users Guide Version 5.10.0. 2025. Available online: https://docs.paraview.org/en/latest/UsersGuide/index.html (accessed on 10 March 2025).
- Almeida, G.A.M.; Bates, P. Applicability of the local inertial approximation of the shallow water equations to flood modeling. Water Resour. Res. 2013, 49, 4833–4844. [Google Scholar] [CrossRef]
- Isaev, S.A.; Kornev, N.V.; Leontiev, A.I.; Hassel, E. Influence of the Reynolds number and the spherical dimple depth on turbulent heat transfer and hydraulic loss in a narrow channel. Int. J. Heat Mass Transf. 2010, 53, 178–197. [Google Scholar]
- Li, P.; Zhang, K.; Wang, J.; Meng, H.; Nicosia, A.; Ferro, V. Overland flow hydrodynamic characteristics in rough beds at low Reynolds numbers. J. Hydrol. 2022, 607, 127555. [Google Scholar]
- Ferro, V.; Guida, G. A theoretically-based overland flow resistance law for upland grassland habitats. Catena 2022, 210, 105863. [Google Scholar]
- Stamou, A.I.; Papadonikolaki, G.; Gkesouli, A.; Nikoletopoulos, A. Modeling the effect of vegetation on river flood-plain hydraulics. Glob. NEST J. 2012, 14, 371–377. [Google Scholar]
- Zhang, H.; Wang, Z.; Dai, L.; Xu, W. Influence of Vegetation on Turbulence Characteristics and Reynolds Shear Stress in Partly Vegetated Channel. J. Fluids Eng. 2015, 137, 061201. [Google Scholar] [CrossRef]
- Hardy, R.J.; Best, J.L.; Lane, S.N.; Carbonneau, P.E. Coherent flow structures in a depth-limited flow over a gravel surface: The role of near-bed turbulence and influence of Reynolds number. J. Geophys. Res. 2010, 114, F01003. [Google Scholar] [CrossRef]
- Rousseau, M.; Cerdan, O.; Delestre, O.; Dupros, F.; James, F.; Cordier, S. Overland Flow Modelling with the Shallow Water Equation Using a Well Balanced Numerical Scheme: Adding Efficiency or just More Complexity? 2012. Available online: https://hal.archives-ouvertes.fr/hal-00664535/ (accessed on 12 January 2025).
- Cantalice, J.; Dias, I.C.G.M.; Andrade, D.S.; Filho, F.M.A.; Souza, W.; Nunes, E.O.S.; Guerra, S.M.S.; Paula Silva, V.; Sartori, L.; Freitas, F.J.; et al. Hydraulic resistance to overland flow governed by Froude number on semi-arid hillslopes under shrubs and crops. Hydrol. Sci. J. 2021, 66, 1531–1540. [Google Scholar] [CrossRef]
- HDFView (Ver 3.3.2) User Manual. Available online: https://www.hdfgroup.org/download-hdfview/ (accessed on 10 March 2025).
- Chang, Y.S.; Scotti, A. Modeling unsteady turbulent flows over ripples: Reynolds-averaged Navier-Stokes equations (RANS) versus large-eddy simulation (LES). J. Geophys. Res. 2004, 109, C09012. [Google Scholar] [CrossRef]
- Lago, C.A.F.; Giacomoni, M.; Bentivoglio, R.; Taormina, R.; Gomes, M.N.; Mendiondo, E.M. Generalizing rapid flood predictions to unseen urban catchments with conditional generative adversarial networks. J. Hydrol. 2023, 618, 129276. [Google Scholar] [CrossRef]
- Ámon, G.; Bene, K. Importance of Eddy Viscosity and Advection in Hydrodynamical Models for Simulating Flash Floods on Steep Sloped Watersheds. Chem. Eng. Trans. 2024, 114, 805–810. [Google Scholar]
- Ámon, G.; Bene, K.; Ray, R.; Gribovszki, Z.; Kalicz, P. Improving Flash Flood Hydrodynamic Simulations by Inte-grating Leaf Litter and Interception Processes in Steep-Sloped Natural Watersheds. Water 2024, 16, 750. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Scenario | Solvers | Options | Cell Size (m) |
|---|---|---|---|---|
| Basic | 1 | DWE | - | 2 × 2 |
| 2 | SWE | - | 2 × 2 | |
| 3 | LIA | - | 2 × 2 | |
| LES and Scale | 4 | SWE-LES | LES | 2 × 2 |
| 5 | LIA-LES | LES | 2 × 2 | |
| 6 | SWE1-LES | LES | 1 × 1 | |
| 7 | LIA1-LES | LES | 1 × 1 | |
| Obstacles | 8 | SWEO | Obstacles | 2 × 2 |
| 9 | LIAO | Obstacles | 2 × 2 | |
| 10 | SWEO-LES | LES + Obstacles | 2 × 2 | |
| 11 | LIAO-LES | LES + Obstacles | 2 × 2 |
| W-1 5% | W-2 10% | W-3 20% | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Base | Compare | NSE | KGE | Pearson | NSE | KGE | Pearson | NSE | KGE | Pearson |
| 2-Swe | 1-Diff | 0.994 | 0.987 | 0.997 | 0.995 | 0.958 | 0.998 | 0.665 | 0.760 | 0.817 |
| 2-Swe | 3-Lia | 0.994 | 0.986 | 0.997 | 0.995 | 0.954 | 0.998 | 0.971 | 0.926 | 0.987 |
| 2-Swe | 4-Swe-Les | 0.994 | 0.987 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 |
| 2-Swe | 5-Lia-Les | 0.995 | 0.987 | 1.000 | 0.995 | 0.956 | 0.998 | 0.969 | 0.911 | 0.987 |
| 2-Swe | 6-Swe1-Les | 0.978 | 0.922 | 1.000 | 0.938 | 0.885 | 1.000 | 0.881 | 0.862 | 0.999 |
| 2-Swe | 7-Lia1-Les | 0.979 | 0.962 | 1.000 | 0.953 | 0.890 | 0.998 | 0.862 | 0.820 | 0.987 |
| 8-SweO | 9-LiaO | 0.990 | 0.942 | 0.996 | 0.970 | 0.919 | 0.987 | 0.923 | 0.892 | 0.963 |
| 8-SweO | 10-SweO-Les | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 |
| 8-SweO | 11-LiaO-Les | 0.993 | 1.000 | 0.998 | 0.978 | 1.000 | 0.991 | 0.973 | 1.000 | 0.988 |
| W1 | W2 | W3 | ||||
|---|---|---|---|---|---|---|
| Solution | Qmax [cms] | Verror [%] | Qmax [cms] | Verror [%] | Qmax [cms] | Verror [%] |
| 1-DWE | 46.15 | 0.03 | 47.92 | 0.04 | 145.51 | 0.02 |
| 2-SWE | 47.25 | 0.03 | 46.99 | 0.28 | 46.88 | 0.16 |
| 3-LIA | 46.16 | 0.03 | 48.06 | 0.37 | 49.34 | 0.15 |
| 4-SWE+LES | 46.17 | 0.03 | 46.97 | 0.28 | 47.14 | 0.05 |
| 5-LIA+LES | 46.20 | 0.03 | 47.78 | 0.36 | 51.84 | 0.12 |
| 6-SWE1+LES | 47.92 | 0.03 | 51.52 | 0.13 | 51.57 | 0.61 |
| 7-LIA1+LES | 46.45 | 0.03 | 51.04 | 0.18 | 57.32 | 0.39 |
| 8-SWEO | 34.11 | 0.06 | 41.38 | 0.75 | 45.32 | 0.80 |
| 9-LIAO | 37.46 | 0.02 | 45.62 | 0.03 | 51.54 | 0.10 |
| 10-SWEO+LES | 34.10 | 0.07 | 41.37 | 0.76 | 45.35 | 0.79 |
| 11-LIAO+LES | 36.90 | 0.02 | 44.94 | 0.03 | 48.92 | 0.17 |
| Model | W1 | W2 | W3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Sim/SWE Ratio | Avg Time Step [s] | Sim/Event Ratio | Sim/SWE Ratio | Avg Time Step [s] | Sim/Event Ratio | Sim/SWE Ratio | Avg Time Step [s] | Sim/Event Ratio | |
| 1 | 0.6 | 0.4 | 8 | 0.6 | 0.4 | 7.76 | 0.4 | 0.4 | 4.14 |
| 2 | 1.0 | 0.4 | 4.87 | 1.0 | 0.4 | 4.29 | 1.0 | 0.3 | 2.25 |
| 3 | 0.8 | 0.4 | 6.08 | 0.8 | 0.4 | 5.2 | 1.0 | 0.4 | 2.23 |
| 4 | 1.2 | 0.4 | 4.2 | 1.2 | 0.4 | 3.71 | 0.9 | 0.3 | 2.41 |
| 5 | 1.1 | 0.4 | 4.3 | 1.1 | 0.4 | 3.83 | 1.1 | 0.4 | 2.01 |
| 6 | 5.0 | 0.4 | 0.98 | 6.4 | 0.3 | 0.67 | 6.1 | 0.2 | 0.37 |
| 7 | 5.0 | 0.4 | 0.98 | 6.4 | 0.3 | 0.67 | 6.0 | 0.2 | 0.38 |
| 8 | 1.0 | 0.4 | 4.66 | 1.0 | 0.3 | 2.53 | 1.0 | 0.2 | 2.06 |
| 9 | 1.3 | 0.3 | 3.66 | 0.7 | 0.3 | 3.65 | 1.0 | 0.2 | 2.12 |
| 10 | 1.2 | 0.4 | 4 | 1.1 | 0.3 | 2.21 | 1.1 | 0.2 | 1.81 |
| 11 | 1.8 | 0.3 | 2.59 | 1.0 | 0.3 | 2.56 | 1.0 | 0.3 | 1.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ámon, G.; Bene, K.; Ray, R. Comparing Depth-Integrated Models to Compute Overland Flow in Steep-Sloped Watersheds. Hydrology 2025, 12, 67. https://doi.org/10.3390/hydrology12040067
Ámon G, Bene K, Ray R. Comparing Depth-Integrated Models to Compute Overland Flow in Steep-Sloped Watersheds. Hydrology. 2025; 12(4):67. https://doi.org/10.3390/hydrology12040067
Chicago/Turabian StyleÁmon, Gergely, Katalin Bene, and Richard Ray. 2025. "Comparing Depth-Integrated Models to Compute Overland Flow in Steep-Sloped Watersheds" Hydrology 12, no. 4: 67. https://doi.org/10.3390/hydrology12040067
APA StyleÁmon, G., Bene, K., & Ray, R. (2025). Comparing Depth-Integrated Models to Compute Overland Flow in Steep-Sloped Watersheds. Hydrology, 12(4), 67. https://doi.org/10.3390/hydrology12040067