Abstract
An optimized embedded 5(3) pair of explicit Runge–Kutta–Nyström methods with four stages using phase-fitted and amplification-fitted techniques is developed in this paper. The new adapted pair can exactly integrate (except round-off errors) the common test: . The local truncation error of the new method is derived, and we show that the order of convergence is maintained. The stability analysis is addressed, and we demonstrate that the developed method is absolutely stable, and thus appropriate for solving stiff problems. The numerical experiments show a better performance of the new embedded pair in comparison with other existing RKN pairs of similar characteristics.
1. Introduction
The aim of this paper is to efficiently solve special second-order initial-value systems of the form
for which it is known that their solutions are oscillatory, where and is sufficiently differentiable. In recent and past years, the search for new numerical algorithms to efficiently solve (1) has attracted the attention of many researchers due to the great relevance of these problems in so many areas of applied sciences (as quantum chemistry, fluid mechanics, physical chemistry, astronomy and many others). To solve (1) directly, the class of Runge–Kutta–Nyström (RKN) methods has mostly been used. Regarding the efficient use of these methods, the embedded technique was firstly proposed by Fehlberg in [1] to provide an estimate of the error committed on each step. Since then there have been many researchers who have presented pairs of embedded RKN methods. Van de Vyver developed in [2] an explicit 5(3) embedded pair of RKN methods with four stages for solving (1). Franco developed a 5(3) embedded pair of explicit ARKN schemes with four stages in [3]. Simos [4], Kalogiratou and Simos [5], Van de Vyver [6] and Liu [7] derived different adapted RKN methods. Senu et al. constructed an explicit embedded pair of RKN methods in [8], Franco et al. [9] presented two embedded explicit RKN pairs for approximating the oscillatory solution of (1). Anastassi and Kosti developed a 6(4) embedded RKN optimized pair in [10]. Fang et al. developed a new pair of explicit ARKN methods in [11], for the numerical integration of general perturbed oscillators. Similarly, Fang et al. in [12] constructed an efficient energy-preserving method for general nonlinear oscillatory Hamiltonian systems. Also, Mei et al. in [13] derived an arbitrary order ERKN method based on group theory for solving oscillatory Hamiltonian systems, and Yang et al. in [14] developed an extended RKN-type method for the numerical integration of perturbed oscillators. Recently, Demba et al. [15,16] derived two new explicit RKN methods trigonometrically adapted for solving the kind of problems in (1). Most recently, Demba et al. [17] derived an exponentially-fitted explicit RKN pair for solving (1).
This work aims at the development of a new phase-fitted and amplification-fitted 5(3) embedded pair of explicit RKN methods based on the 5(3) pair presented by Van der Vyver [2] for solving the problem in (1). The derived method accurately solves the test equation . The numerical experiments reveal the efficiency of the developed method when compared with other embedded RKN codes of orders 5(3) with four stages.
The remaining part of this paper is organized in this way: the description of a pair of explicit RKN methods, the definitions of phase-lag and amplification error, and the definitions regarding the stability analysis are addressed in Section 2. Section 3 is devoted to the construction of the new code, to determine the order and error analysis, and to bring some details about the linear stability of the derived pair. Some numerical examples are presented in Section 4 along with some comments on the results obtained. Finally, Section 5 gives a conclusion.
2. Fundamental Concepts
2.1. Explicit Runge-Kutta-Nyström Methods
An explicit RKN method with r stages for the problem (1) is generally expressed by the formulas:
where and denote approximations for and respectively, and the grid points on the integration interval are given by , with h the fixed step-size considered. The above explicit method may be formulated compactly using the Butcher array in the form
where a lower triangular matrix of coefficients, is the vector of stages, and , are two vectors containing the remaining coefficients of the method. For short, this can be denoted as .
| c | A | ||||
An embedded-type pair of RKN methods comprises two such methods, one given by with order m, and another one of order n () given by () which shares the coefficients in c and A. The higher order method provides for each step an approximate solution , , while a second approximate solution , is provided by the method of lower order. The purpose of the second approximation is to provide an estimate of the local truncation error. A RKN pair of embedded methods may be expressed using the Butcher array in the form
| c | A | ||||
On the basis of the local error estimation provided by the embedding procedure, a variable step-size approach can be constructed. The local error estimate at is obtained through the differences between the two approximations of the solution and of the derivative, that is, and .
Let denote the local error estimate used to decide the step-length on the iteration. In order to advance the solution of the problem in hand we use the step-length control strategy presented in [7]:
- if ,
- if
- if and redo the computations of the current step.
being the prescribed tolerance.
2.2. Analysis of Phase-Lag, Amplification Error and Stability
Applying the RKN method in (2)–(4) to the test equation , the phase-lag, amplification error, and the linear stability are derived. In particular, letting , , the approximate solution provided by (2)–(4) verifies the recurrence equation:
where
, are the corresponding matrix and vectors of coefficients, I is the identity matrix of order four, and
For sufficiently small values of , it is assumed that the matrix possesses complex conjugate eigenvalues [19]. Under this assumption, an oscillatory numerical solution is obtained, whose behavior depends on the eigenvalues of the stability matrix . The characteristic equation of this matrix can be expressed as:
Theorem 1
If , then the method is said to have phase-lag order l. For an explicit RKN method, and are polynomials in (in case of an implicit RKN method these would be rational functions).
Definition 2.
Definition 3
Definition 4.
3. Derivation of the New Embedded Pair
In this section, we will obtain a new 5(3) pair of explicit phase-fitted and amplification-fitted embedded RKN methods based on the RKN5(3) embedded pair derived by Van de Vyver in [2]. The coefficients of the RKN pair in [2] are shown in Table 1.

Table 1.
The RKN5(3) Method in [2].
In order to get the new adapted pair we first consider the coefficients of the third-order scheme in the RKN5(3) pair. Equating to zero the phase-lag and the amplification error we get the system:
We solve this system considering the coefficients in Table 1 except two of them, which are taken as unknowns. Specifically, we take and as unknowns. We obtain the following values:
where
The corresponding Taylor series expansions in powers of are given by
As , the newly obtained coefficients become the coefficients of the counterpart scheme in the original pair.
Similarly, if we take the coefficients of the fifth-order scheme in the RKN5(3) pair, except and , which are taken as unknowns in the Equation (8), the solution of this system results in
where
The corresponding Taylor series expansions in powers of of the above coefficients are given by
As , the newly obtained coefficients in the fifth-order adapted scheme become those of the counterpart scheme in the original pair.
The new adapted RKN pair will be named as PFAFRKN5(3).
3.1. Order of Convergence
This section is devoted to presenting the local truncation errors of the proposed methods and to get the algebraic orders of convergence. This is accomplished by using the usual tool of Taylor expansions. The local truncation errors (LTE) at the point of the solution and the first derivative are given respectively by:
Proposition 1.
For the lower order method, the corresponding LTEs are:
where the functions in the right hand sides are evaluated at .
Proposition 2.
For the higher order method, we have:
where the functions in the right hand sides are evaluated at.
To effectively determine the order of the proposed method, we have checked the order conditions as given in [2]. We obtained that the lower order method has algebraic order three and the higher order method has algebraic order five, thus resulting in a 5(3) RKN pair.
3.2. Absolute Stability Intervals of the New Adapted Pair
Proposition 3.
The third-order method of the PFAFRKN5(3) pair has as interval of absolute stability and the fifth-order scheme has the absolute stability interval .
Using the Maple package, from the definition in (5), the above results can be readily obtained.
4. Numerical Examples
To demonstrate the performance of the new pair, we have considered other 5(3) RKN pairs that appear in the literature to be used for the numerical comparisons:
- PFAFRKN5(3): The adapted RKN embedded pair developed in this paper,
- RKN5(3): An explicit 5(3) RKN pair presented by Van de Vyver in [2],
- ARKN5(3): An explicit 5(3) adapted RKN pair given by Franco in [3],
- EFRKN5(3): An embedded exponentially-fitted explicit RKN pair presented by Van de Vyver in [6],
- EEERKN5(3): An embedded exponentially-fitted explicit RKN method derived by Demba et al. in [17].
We will consider different oscillatory problems appeared in the literature to test the performance of the above methods:
Problem 1.
(Almost Periodic Problem in [20])
whose exact solution is
For the numerical computations we have taken and .
To use the adapted methods we have taken the parameter value .
Problem 2.
whose exact solution is
(Two Body Problem in [21])
To apply the adapted methods we have taken the value.
Problem 3.
withand.
(Nonlinear Problem in [22])
The reference solution is
which is an accurate approximate solution given in [22].
Now we taketo apply our method and the ones in [3,6,17].
Problem 4.
(Non-homogeneous System) in [8]
whose exact solution is
In the numerical computations we have taken the values,, and.
We have solved this problem on the intervaltaking the value of the fitting parameter.
Problem 5.
with.
(Linear Problem in [23])
The exact solution is
Now we taketo apply our method and the ones in [3,6,17].
Discussion
The numerical data are given in Table 2, Table 3, Table 4, Table 5 and Table 6, considering different tolerances. The tables contain the number of steps, NSTEP; the number of function evaluations, NFE; the number of rejected steps, RSTEP; the maximum absolute errors, MAXER, and the computational time in seconds.
Table 2.
Numerical data corresponding to Problem 1.
Table 3.
Numerical data corresponding to Problem 2.
Table 4.
Numerical data corresponding to Problem 3.
Table 5.
Numerical data corresponding to Problem 4.
Table 6.
Numerical data corresponding to Problem 5.
To better show the efficiency of the developed PFAFRKN5(3) pair, we present in Figure 1, Figure 2, Figure 3, Figure 4 and Figure 5 the efficiency curves for the considered problems. It can be observed that the good behavior of the new pair for tolerances , with .
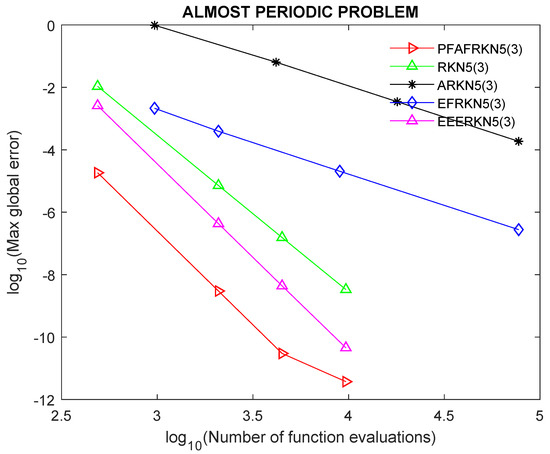
Figure 1.
Efficiency curves corresponding to Problem 1.
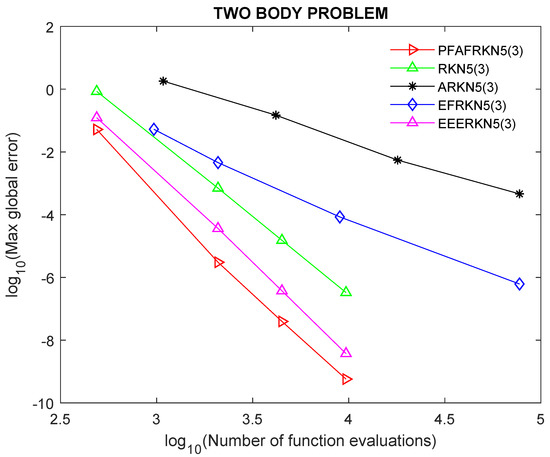
Figure 2.
Efficiency curves corresponding to Problem 2.
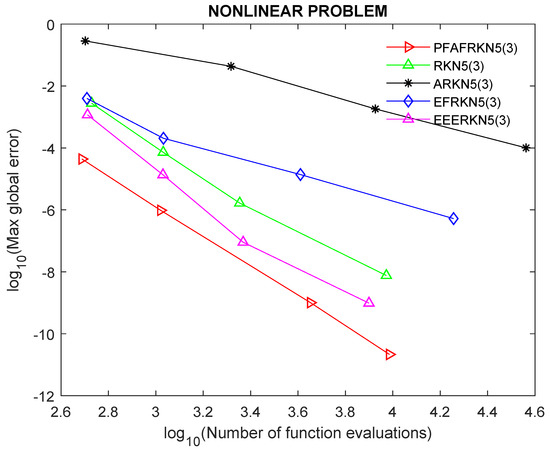
Figure 3.
Efficiency curves corresponding to Problem 3.
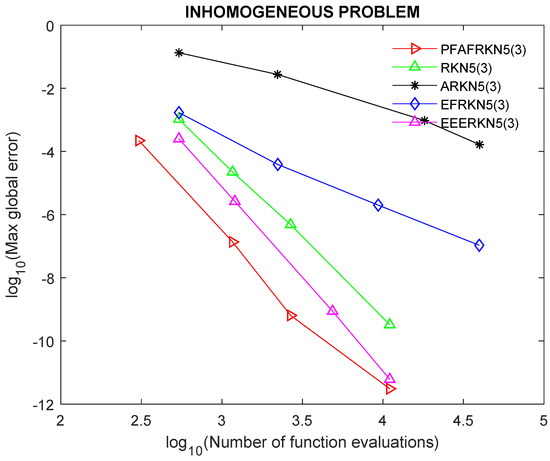
Figure 4.
Efficiency curves corresponding to Problem 4.
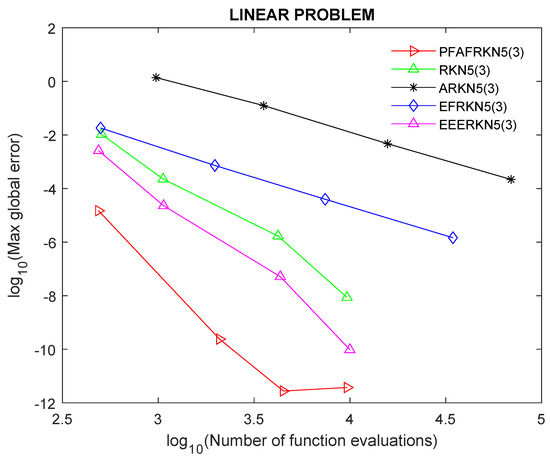
Figure 5.
Efficiency curves corresponding to Problem 5.
The new pair PFAFRKN5(3) gives minimum error norm, minimum number of function evaluations and minimum computational cost. Table 2, Table 3, Table 4, Table 5 and Table 6 and Figure 1, Figure 2, Figure 3, Figure 4 and Figure 5 present evidence that PFAFRKN5(3) is a very efficient scheme. Therefore, we can say that PFAFRKN5(3) is more appropriate for solving the type of problems in (1) than other existing embedded 5(3) pairs of RKN methods with four stages in the literature.
5. Conclusions
In this study, we have used the methodology for constructing phase-fitted and amplification-fitted methods to develop a new efficient explicit phase-fitted and amplification-fitted embedded RKN pair based on the 5(3) RKN pair of Van de Vyver in [2]. The newly developed pair has four variable coefficients depending on the parameter , which is usually known as the parameter frequency [24,25]. We computed the local truncation error for both the higher and lower order methods in the new pair PFAFRKN5(3), confirming that the algebraic orders of convergence of the underlying pair are maintained. In addition, the stability intervals for both the higher and lower order methods have been obtained. The numerical results obtained clearly show that PFAFRKN5(3) is more accurate and efficient than other 5(3) RKN pairs in the literature.
Author Contributions
The authors contributed equally in writing this article. All authors have read and agreed to the published version of the manuscript.
Funding
The Center of Excellence in Theoretical and Computational Science (TaCS-CoE), KMUTT, the Thailand Science Research and Innovation (TSRI) Basic Research Fund, and the Petchra Pra Jom Klao Doctoral Scholarship for Ph.D. Program of the King Mongkut’s University of Technology Thonburi (KMUTT).
Acknowledgments
The authors really appreciate the efforts made by the reviewers of this manuscript for their constructive comments and also thank the Center of Excellence in Theoretical and Computational Science (TaCS-CoE), King Mongkut’s University of Technology, Thonburi (KMUTT), for the financial support. Moreover, this research work is also supported by the Thailand Science Research and Innovation (TSRI) Basic Research Fund, for the fiscal year 2021 with project number 64A306000005. The first author also appreciates the support of the Petchra Pra Jom Klao PhD Research Scholarship from KMUTT with Grant No. 15/2562.
Conflicts of Interest
The authors have no any conflict of interest to declare.
References
- Fehlberg, E. Classical Eight and Lower-Order Runge–Kutta–Nyström Formulas with Step-Size Control for Special Second-Order Differential Equations; National Aeronautics and Space Administration: Washington, DC, USA, 1972. [Google Scholar]
- Van de Vyver, H. A 5(3) pair of explicit Runge–Kutta–Nyström methods for oscillatory problems. Math. Comput. Model. 2007, 45, 708–716. [Google Scholar] [CrossRef]
- Franco, J. A 5(3) pair of explicit ARKN methods for the numerical integration of perturbed oscillators. J. Comput. Appl. Math. 2003, 161, 283–293. [Google Scholar] [CrossRef]
- Simos, T.E. An exponentially-fitted Runge–Kutta method for the numerical integration of initial-value problems with periodic or oscillating solutions. Comput. Phys. Commun. 1998, 115, 1–8. [Google Scholar] [CrossRef]
- Kalogiratou, Z.; Simos, T.E. Construction of trigonometrically and exponentially fitted Runge–Kutta–Nyström methods for the numerical solution of the Schrödinger equation and related problems—A method of 8th algebraic order. J. Math. 2002, 31, 211–232. [Google Scholar]
- Van de Vyver, H. An embedded exponentially fitted Runge–Kutta–Nyström method for the numerical solution of orbital problems. New Astron. 2006, 11, 577–587. [Google Scholar] [CrossRef]
- Liu, L.; Zheng, J.; Fang, Y. A new modified embedded 5(4) pair of explicit Runge–Kutta methods for the numerical solution of the Schrödinger equation. J. Math. Chem. 2013, 51, 937–953. [Google Scholar] [CrossRef]
- Senu, N.; Suleiman, M.; Ismail, F. An embedded explicit Runge–Kutta–Nyström method for solving oscillatory problems. Phys. Scr. 2009, 80, 015005. [Google Scholar] [CrossRef]
- Franco, J.; Khiar, Y.; Rández, L. Two new embedded pairs of explicit Runge–Kutta methods adapted to the numerical solution of oscillatory problems. Appl. Math. Comput. 2015, 252, 45–57. [Google Scholar] [CrossRef]
- Anastassi, Z.A.; Kosti, A.A. A 6(4) optimized embedded Runge–Kutta–Nyström pair for the numerical solution of periodic problems. J. Comput. Appl. Math. 2015, 275, 311–320. [Google Scholar] [CrossRef]
- Fang, Y.; Wu, X. A new pair of explicit ARKN methods for the numerical integration of general perturbed oscillators. Appl. Numer. Math. 2007, 57, 166–175. [Google Scholar] [CrossRef]
- Fang, Y.; Liu, C.Y.; Wang, B. Efficient energy-preserving methods for general nonlinear oscillatory Hamiltonian system. Appl. Numer. Math. 2018, 34, 1863–1878. [Google Scholar] [CrossRef]
- Mei, L.; Wu, X. The construction of arbitrary order ERKN methods based on group theory for solving oscillatory Hamiltonian systems with applications. J. Comput. Phys. 2016, 323, 171–190. [Google Scholar] [CrossRef]
- Yang, H.; Wu, X.; You, X.; Fang, Y. Extended RKN-type methods for numerical integration of perturbed oscillators. Comput. Phys. Commun. 2009, 180, 1777–1794. [Google Scholar] [CrossRef]
- Demba, M.A.; Senu, N.; Ismail, F. An embedded 4(3) pair of explicit trigonometrically-fitted Runge–Kutta–Nyström method for solving periodic initial value problems. Appl. Math. Sci. 2017, 11, 819–838. [Google Scholar] [CrossRef][Green Version]
- Demba, M.A.; Senu, N.; Ismail, F. A 5(4) embedded pair of explicit trigonometrically-fitted Runge–Kutta–Nyström methods for the numerical solution of oscillatory initial value problems. Math. Comput. Appl. 2016, 21, 46. [Google Scholar] [CrossRef]
- Demba, M.A.; Kumam, P.; Watthayu, W.; Phairatchatniyom, P. Embedded exponentially-fitted explicit Runge–Kutta–Nyström methods for solving periodic problems. Computation 2020, 8, 32. [Google Scholar] [CrossRef]
- Hairer, E.; Nørsett, S.; Wanner, G. Solving Ordinary Differential Equations I, Nonstiff Problems, 2nd ed.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Van der Houwen, P.; Sommeijer, B.P. Diagonally implicit Runge–Kutta–Nyström methods for oscillatory problems. SIAM J. Numer. Anal. 1989, 26, 414–429. [Google Scholar] [CrossRef]
- Van de Vyver, H. A Runge–Kutta–Nyström pair for the numerical integration of perturbed oscillators. Comput. Phys. Commun. 2005, 167, 129–142. [Google Scholar] [CrossRef]
- Tsitouras, A.; Kosti, Z.A.; Simos, T.E. An optimized explicit Runge–Kutta–Nyström method for the numerical solution of orbital and related periodical initial value problems. Comput. Phys. Commun. 2012, 183, 470–479. [Google Scholar]
- Berghe, G.V.; De Meyer, H.; Van Daele, M.; Van Hecke, T. Exponentially-fitted explicit Runge–Kutta methods. Comput. Phys. Commun. 1999, 123, 7–15. [Google Scholar] [CrossRef]
- Fang, Y.; Ming, Q. Embedded pair of extended Runge–Kutta–Nyström type methods for perturbed oscillators. Appl. Math. Model. 2010, 34, 2665–2675. [Google Scholar] [CrossRef]
- Ramos, H.; Vigo-Aguiar, J. On the frequency choice in trigonometrically fitted methods. Appl. Math. Lett. 2010, 23, 1378–1381. [Google Scholar] [CrossRef]
- Vigo-Aguiar, J.; Ramos, H. On the choice of the frequency in trigonometrically-fitted methods for periodic problems. J. Comput. Appl. Math. 2015, 277, 94–105. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).