
Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller




Abstract
:1. Introduction
2. Materials and Methods
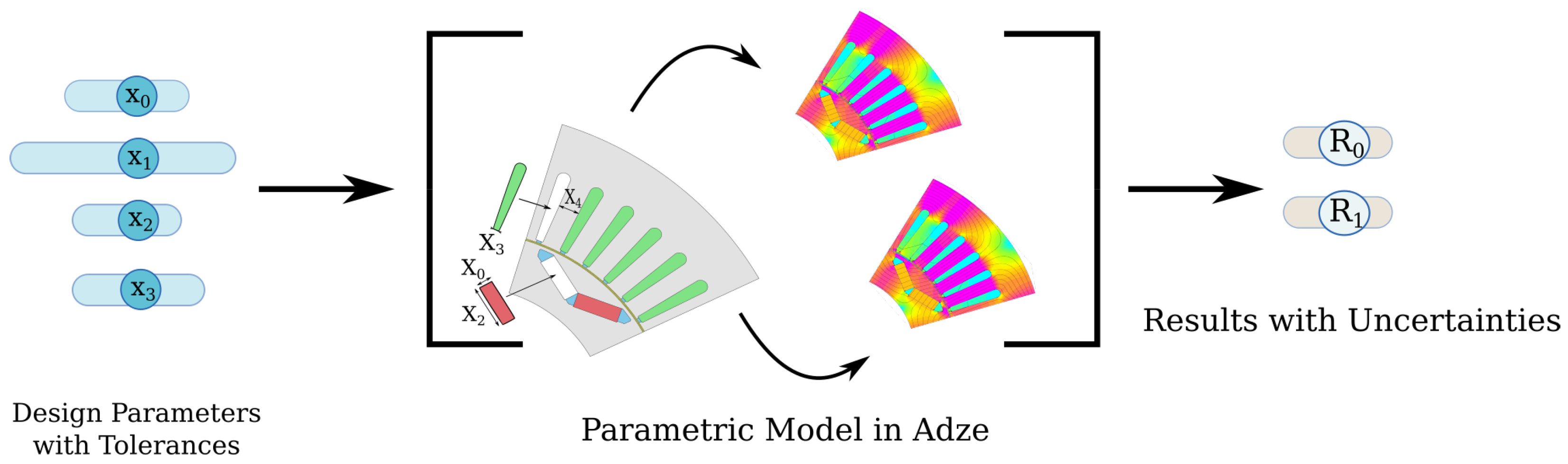
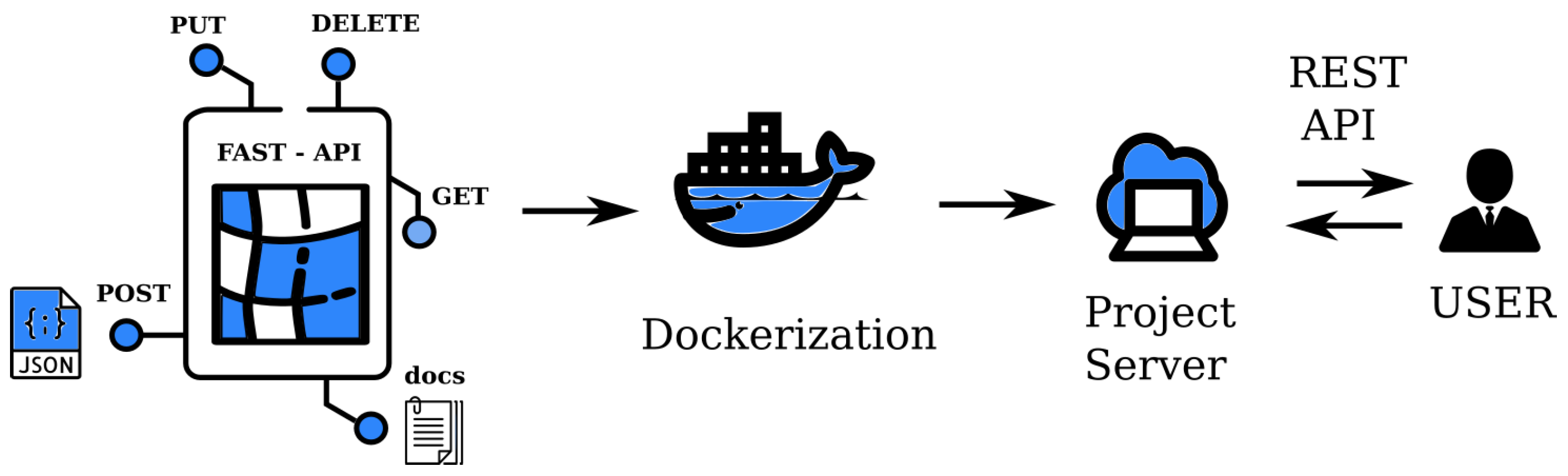
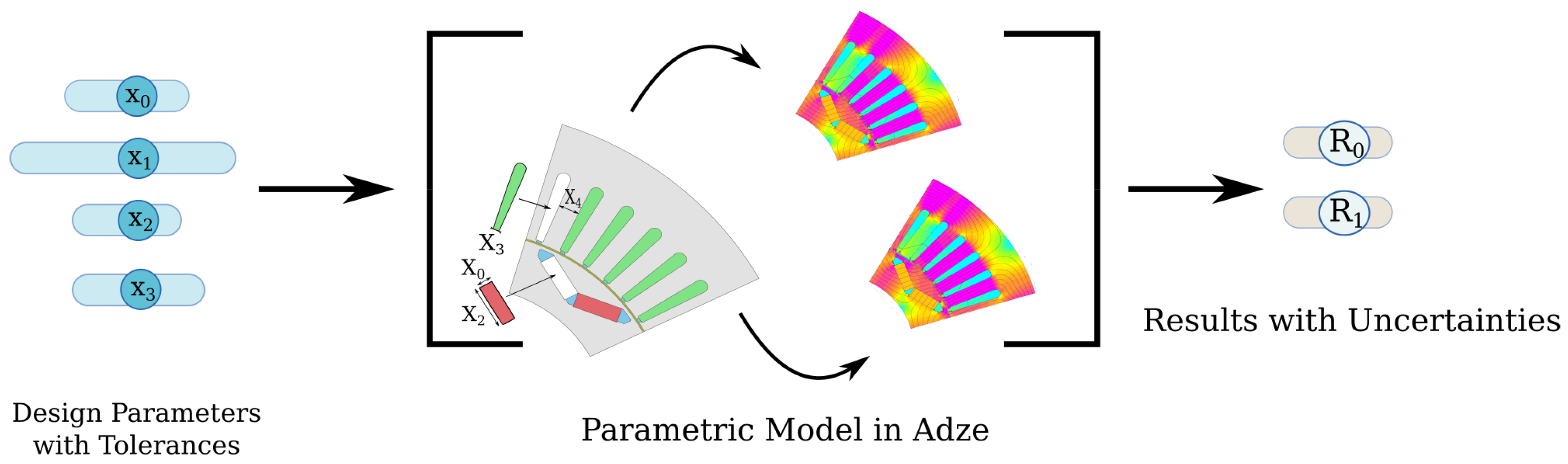
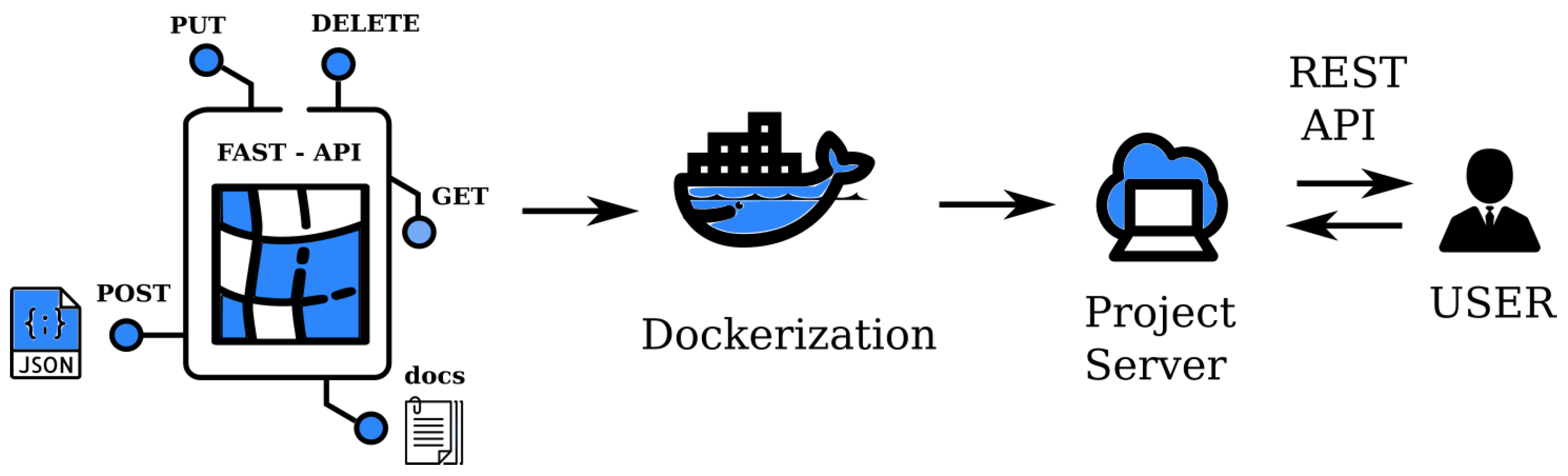
2.1. Modeling with Digital-Twin-Distiller
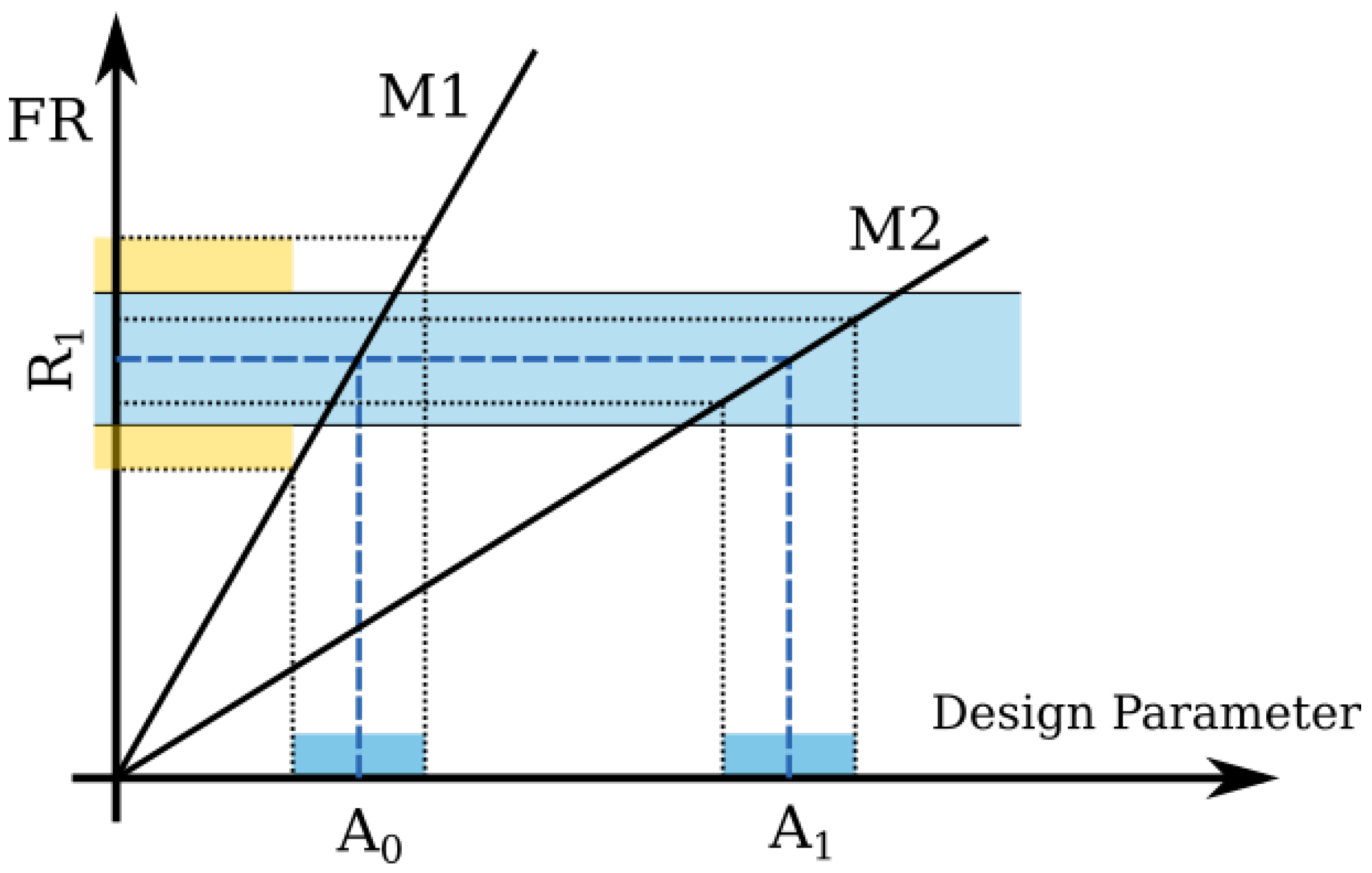
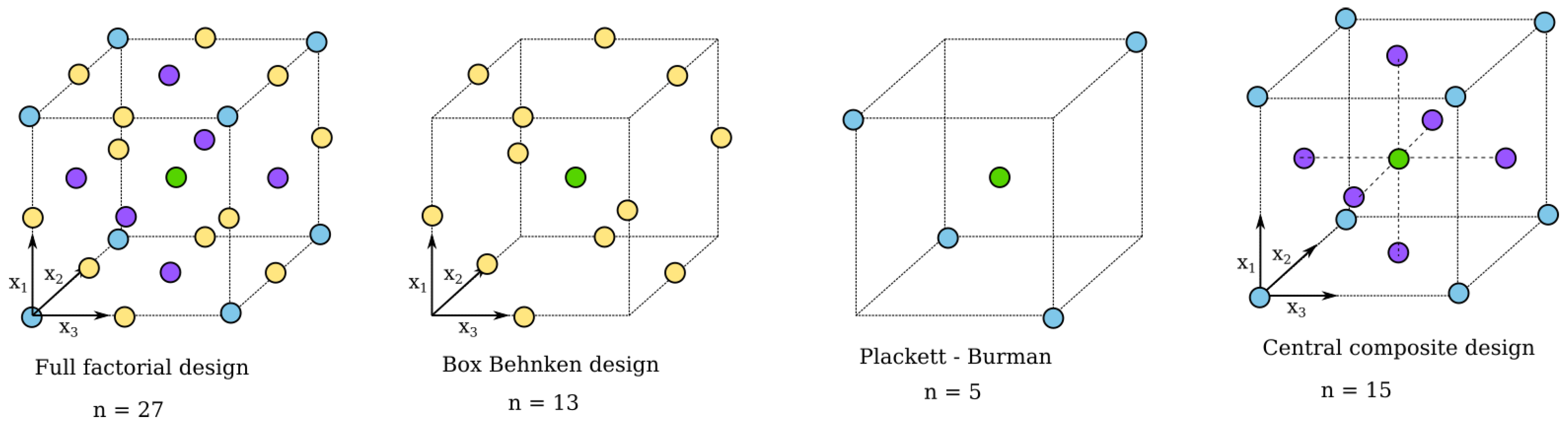
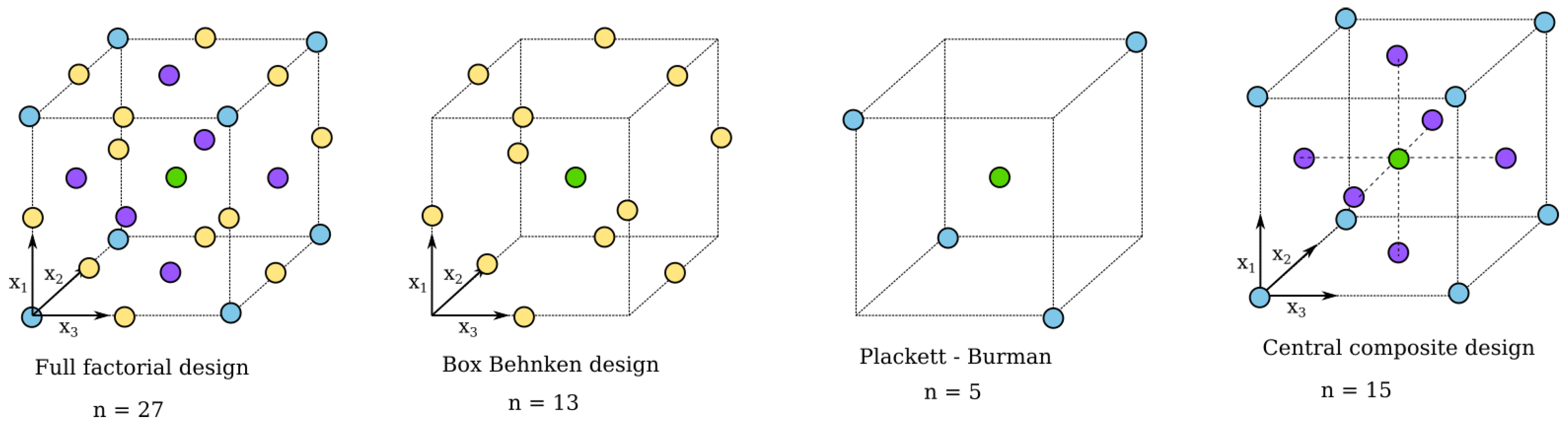
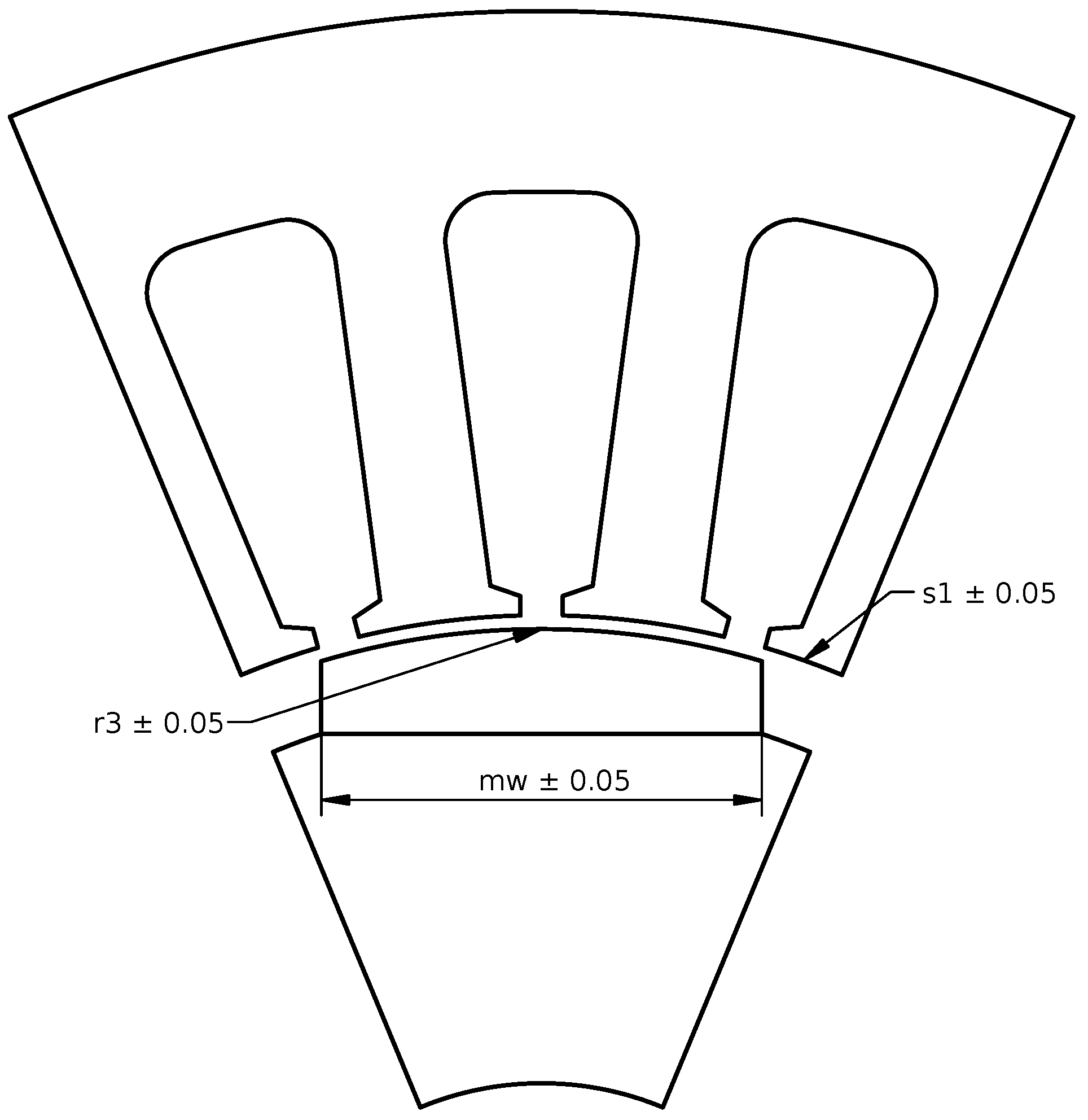
2.2. Design of Experiments for Tolerance Analysis
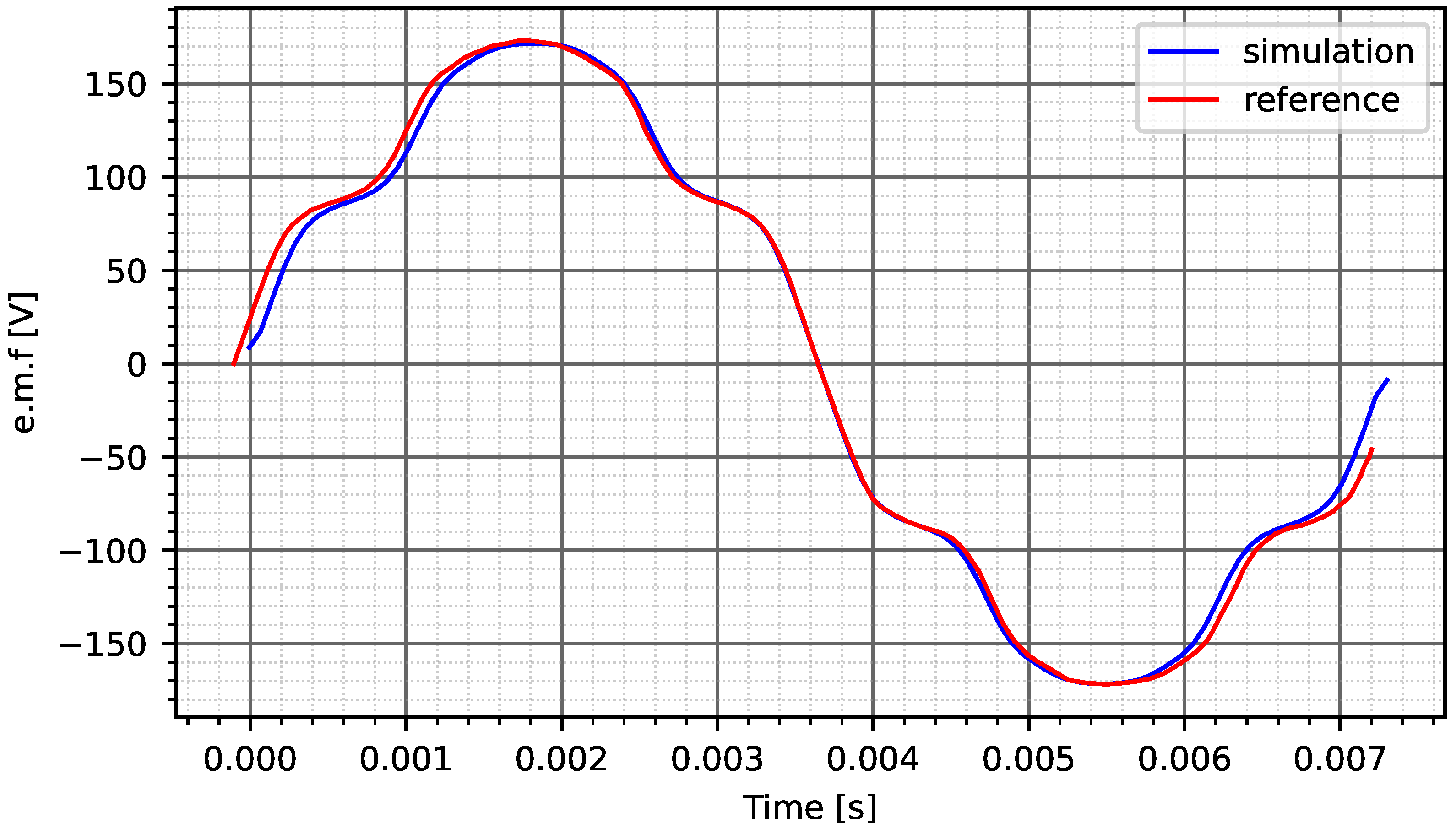
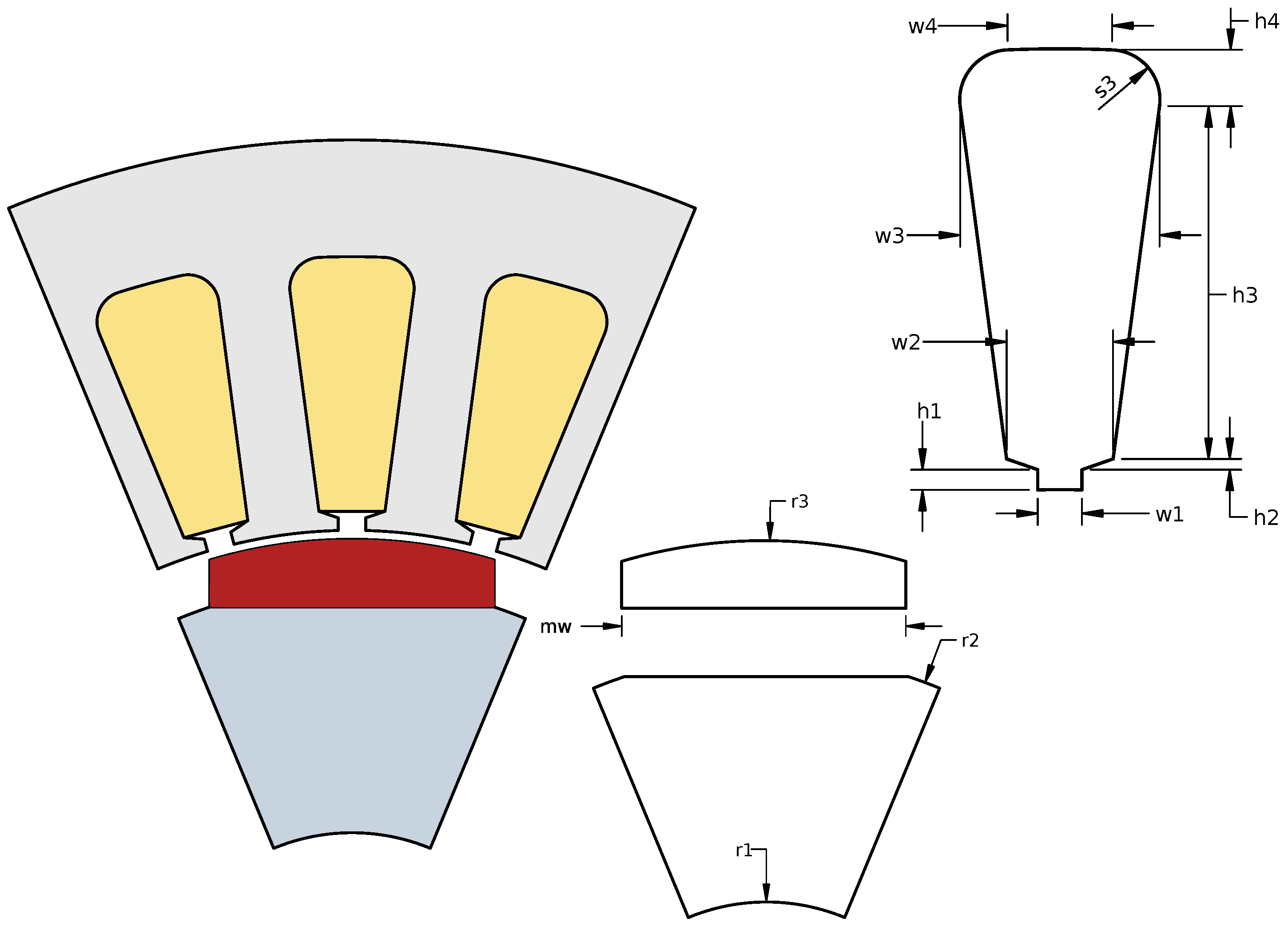
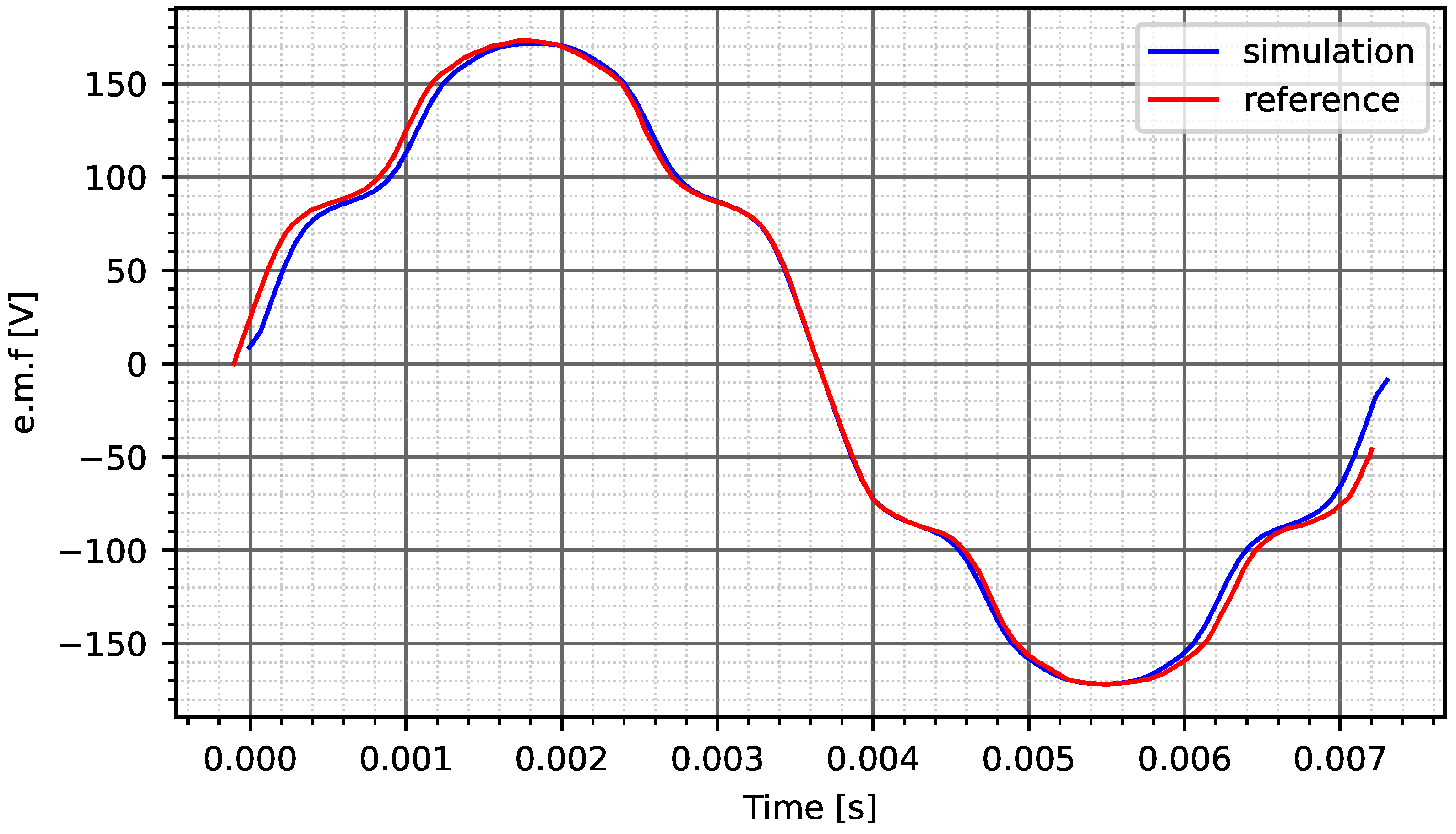
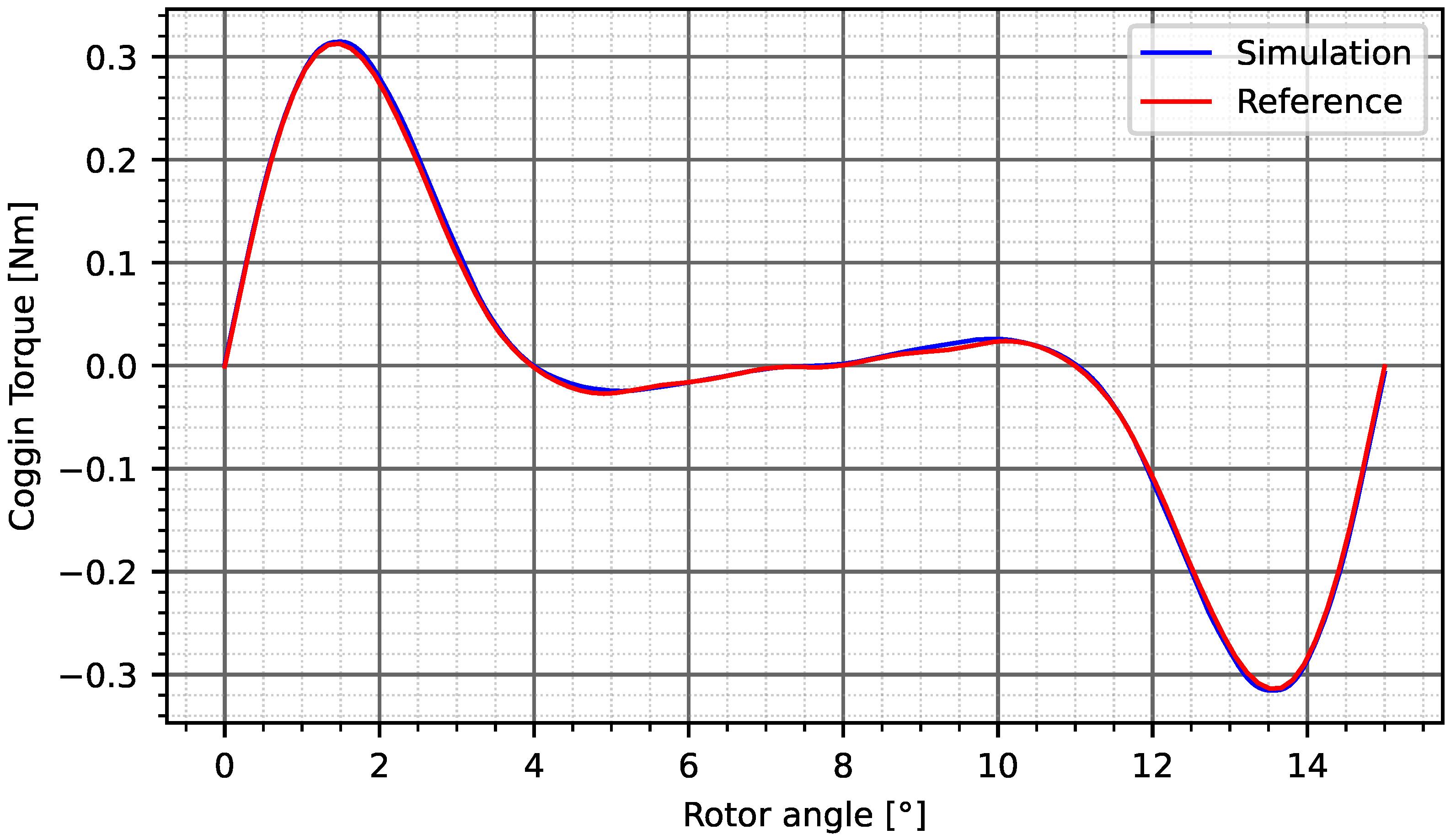
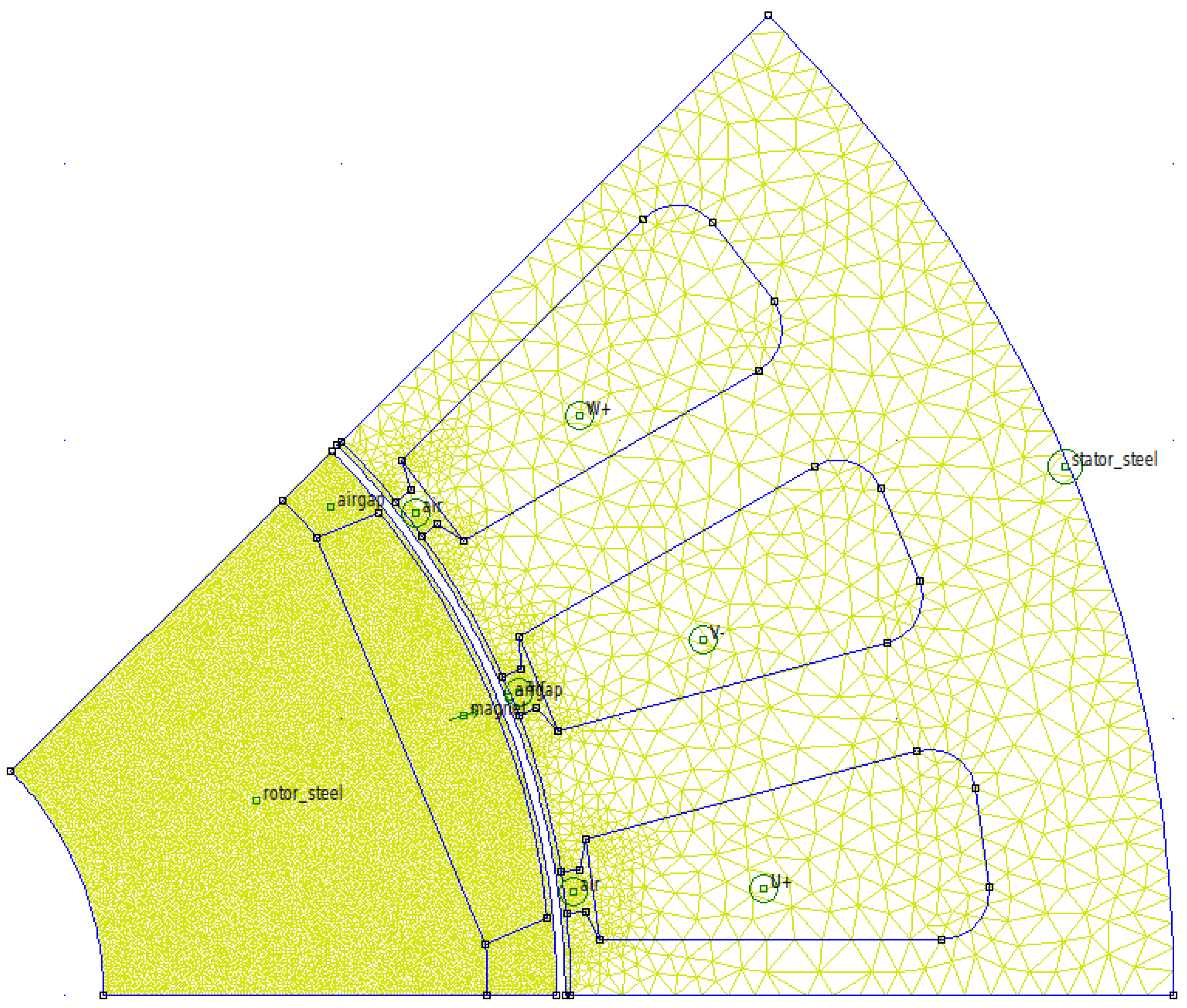
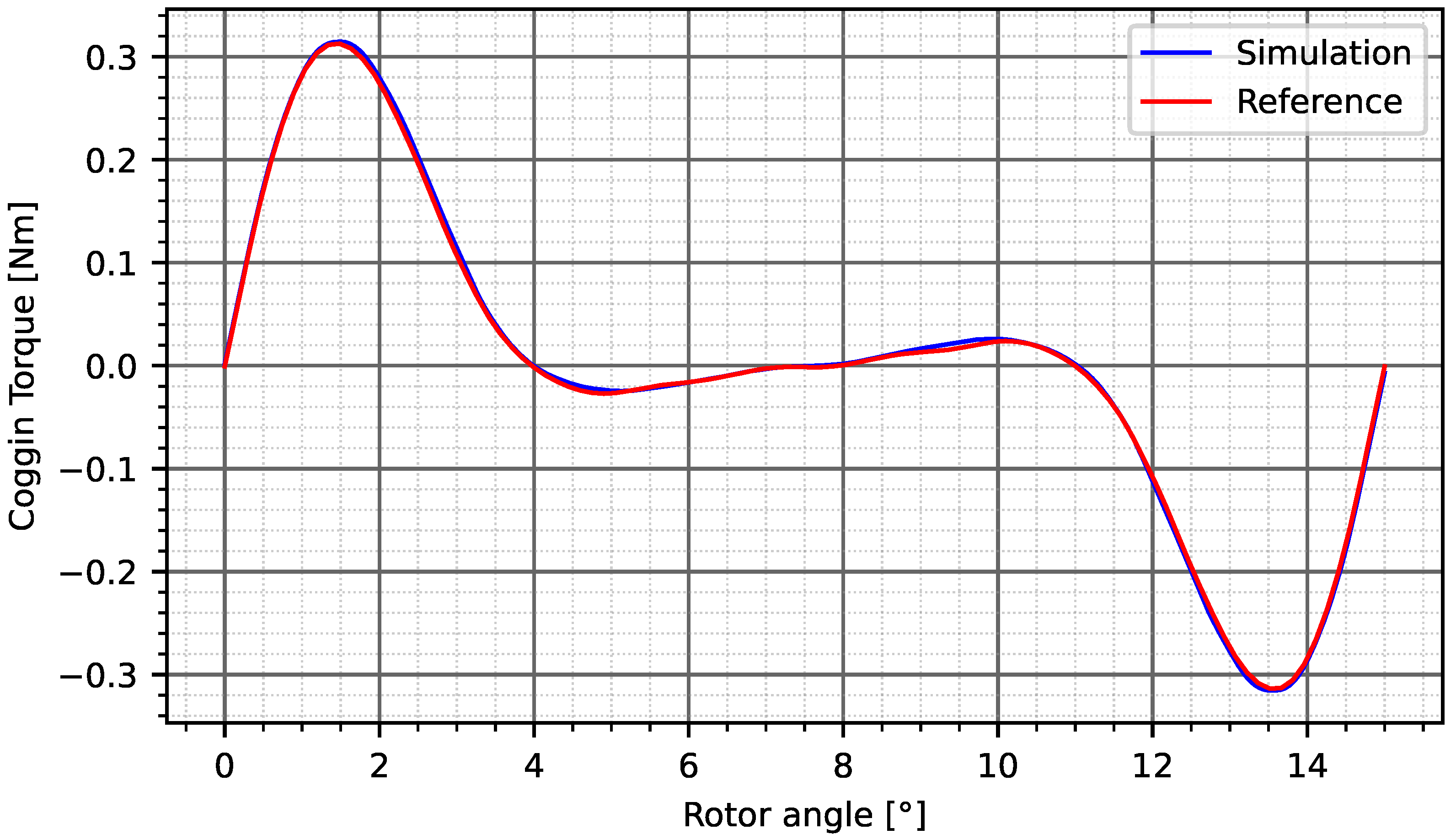
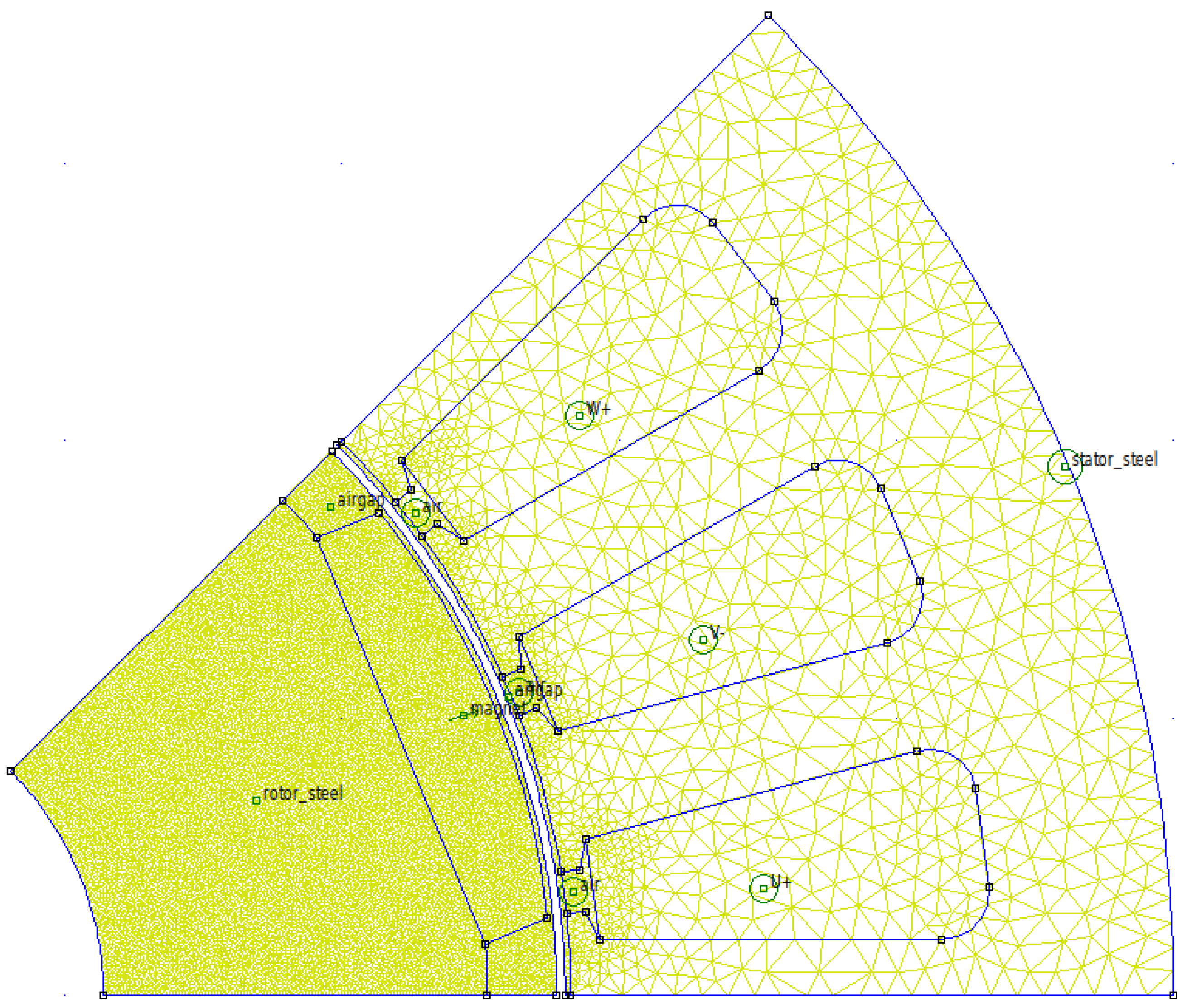
2.3. Computational Model and Validation

| \label {listling} |
| { |
| "tolerances":{ |
| "type":"ff", |
| "parameters":{ |
| "s1":0.05, |
| "r3":0.05, |
| "mw":0.05, |
| "Hc":5000, |
| "mur":0.05 |
| }, |
| "variables":[ |
| "Torque" |
| ] |
| } |
| } |
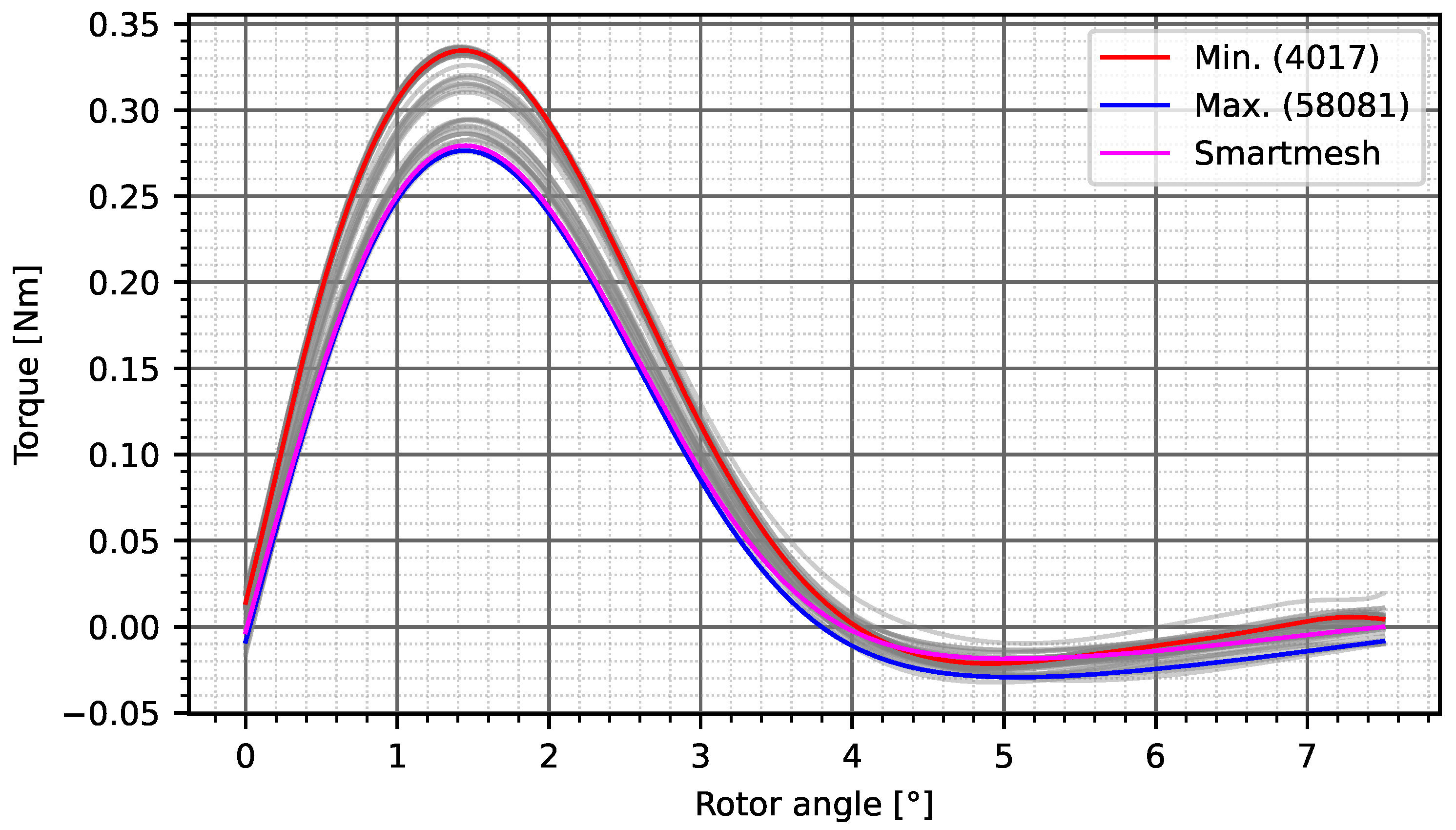
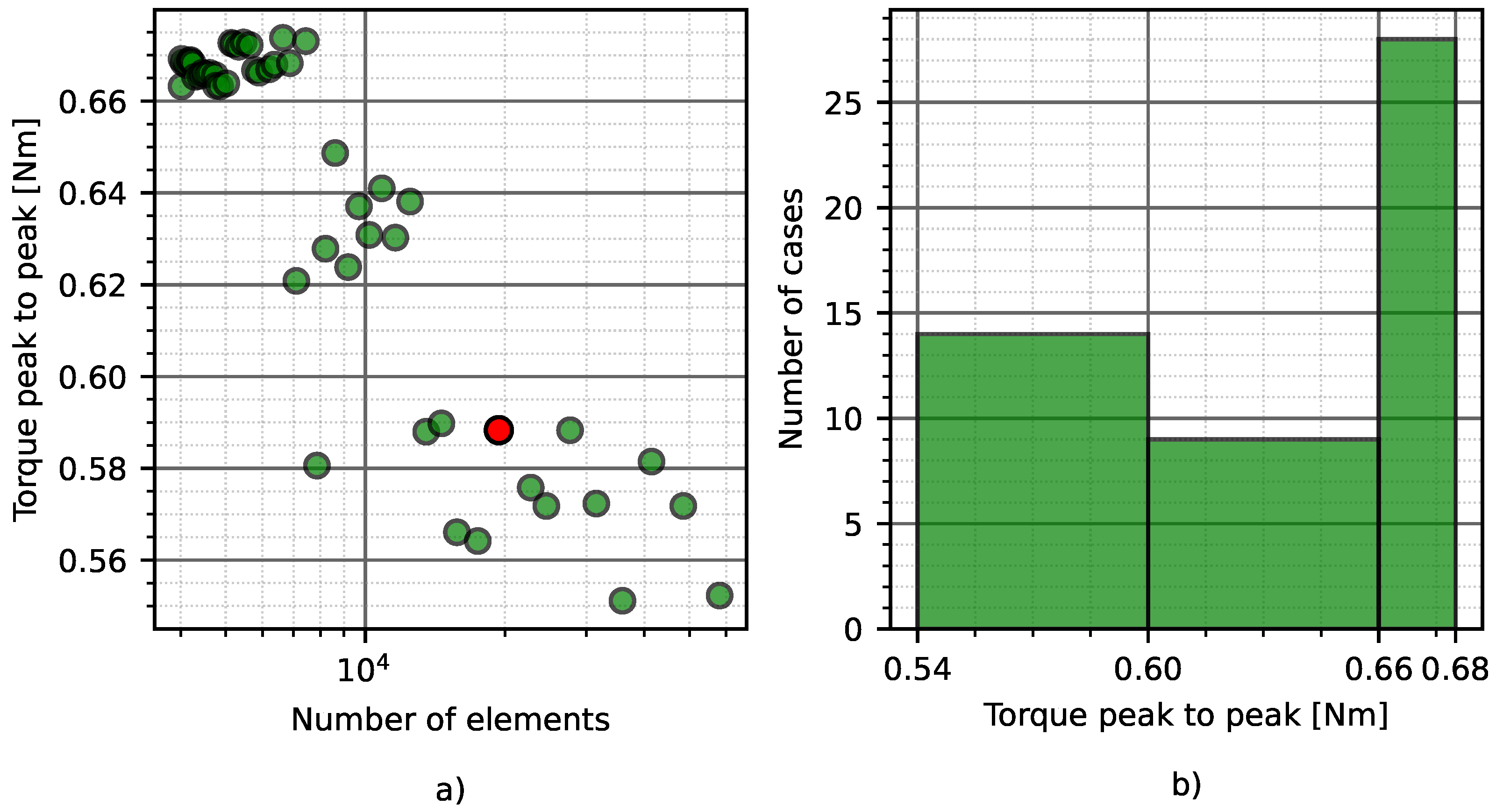
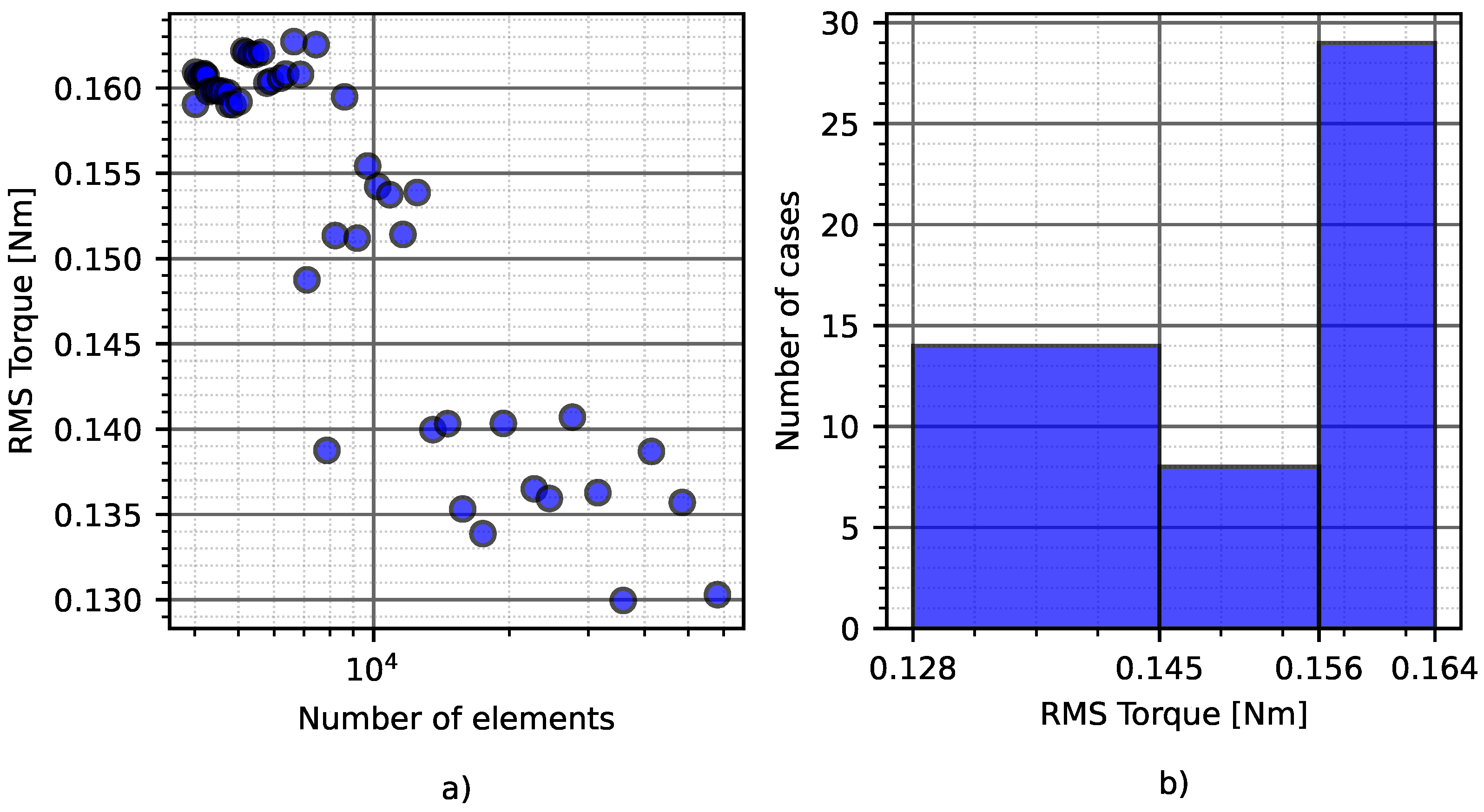
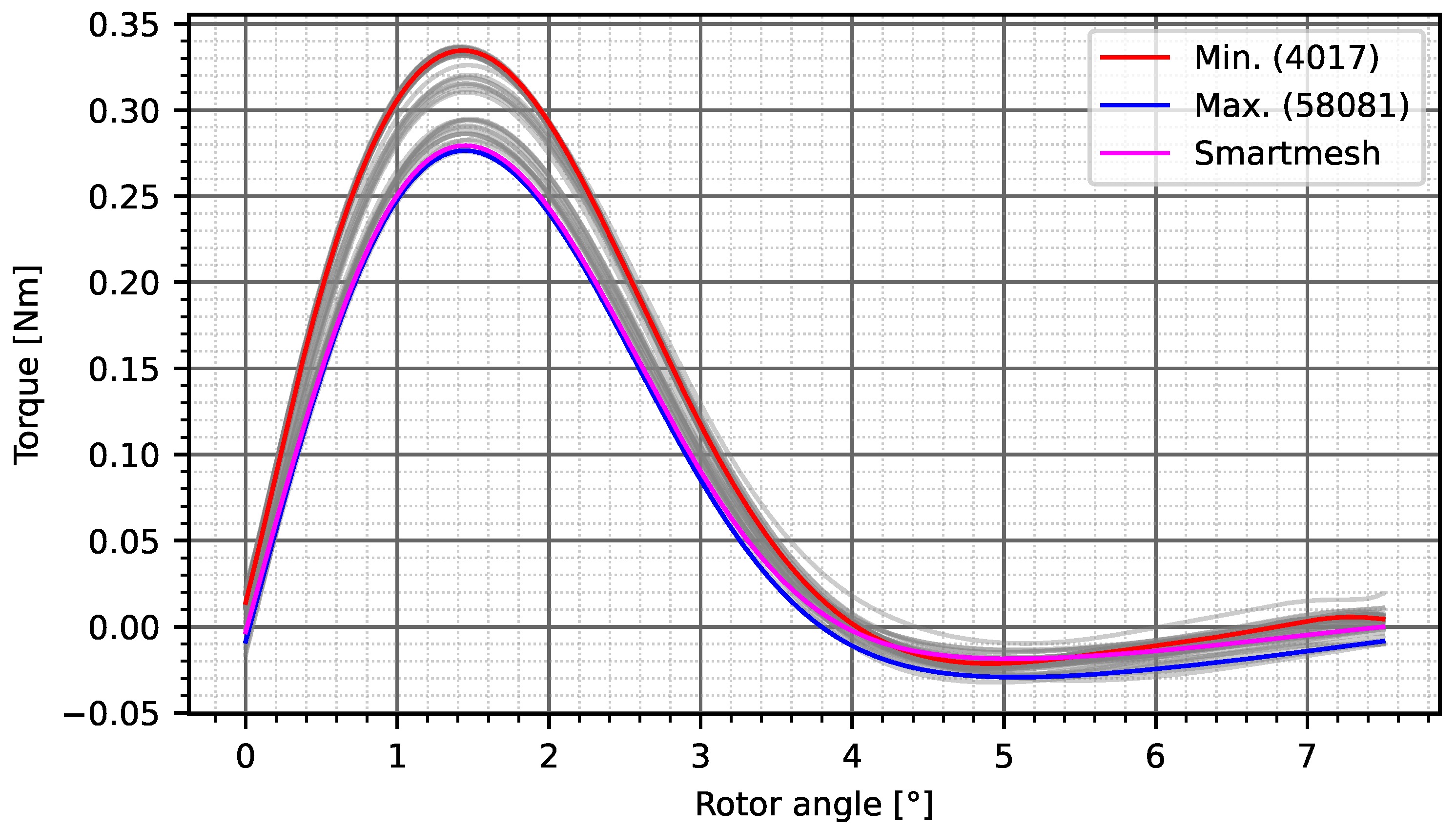
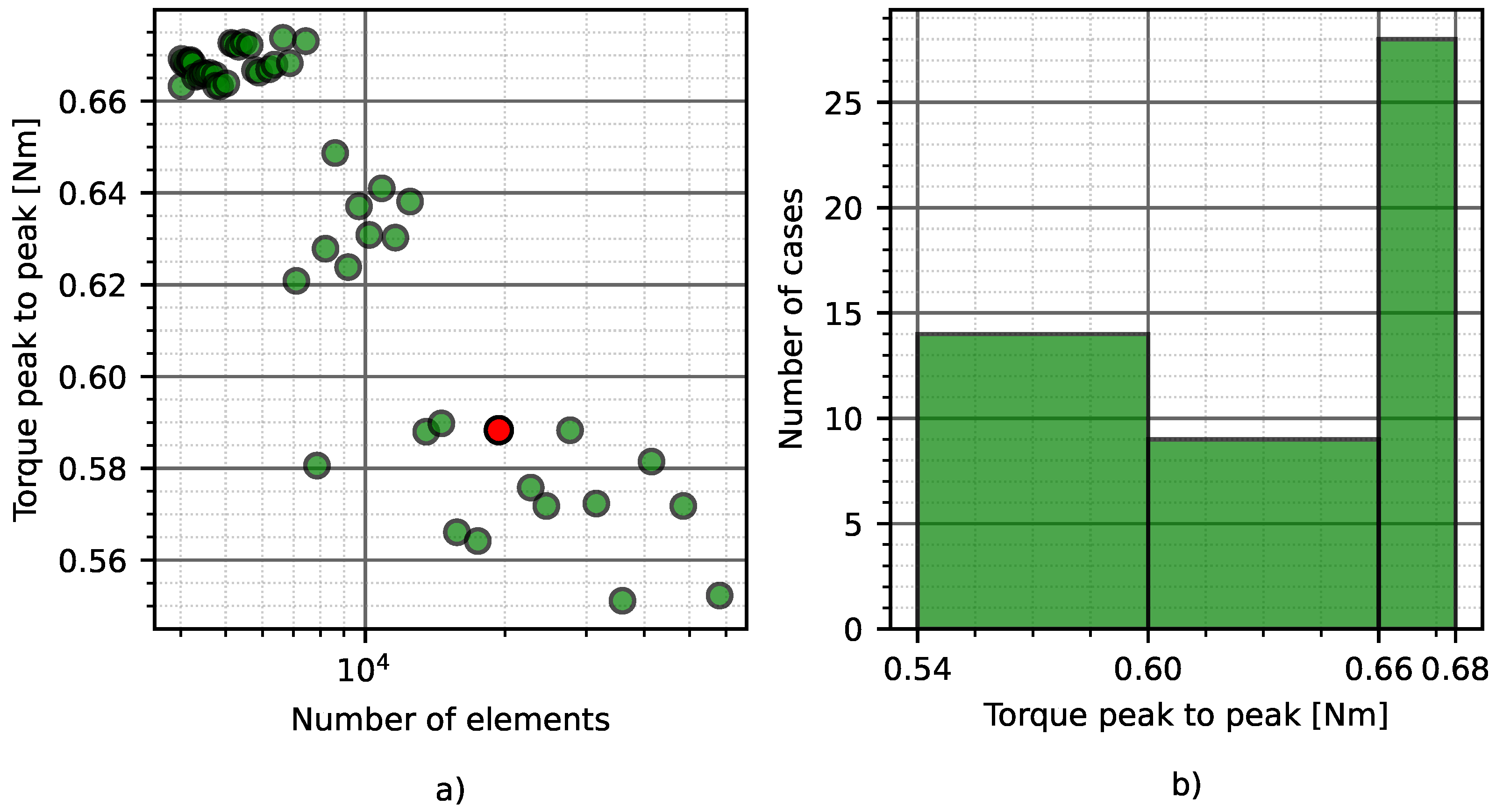
2.4. Mesh Selectivity Analysis
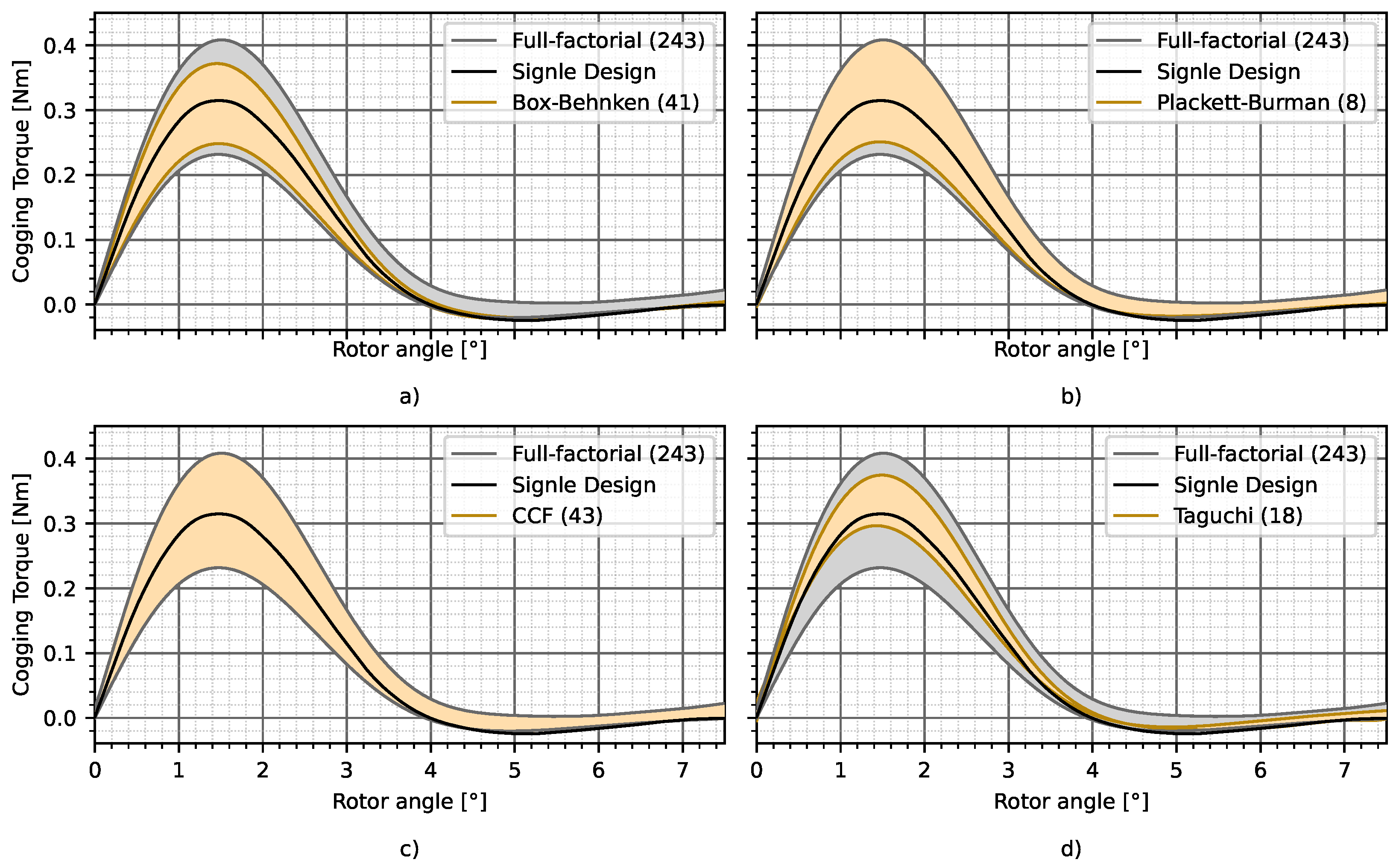
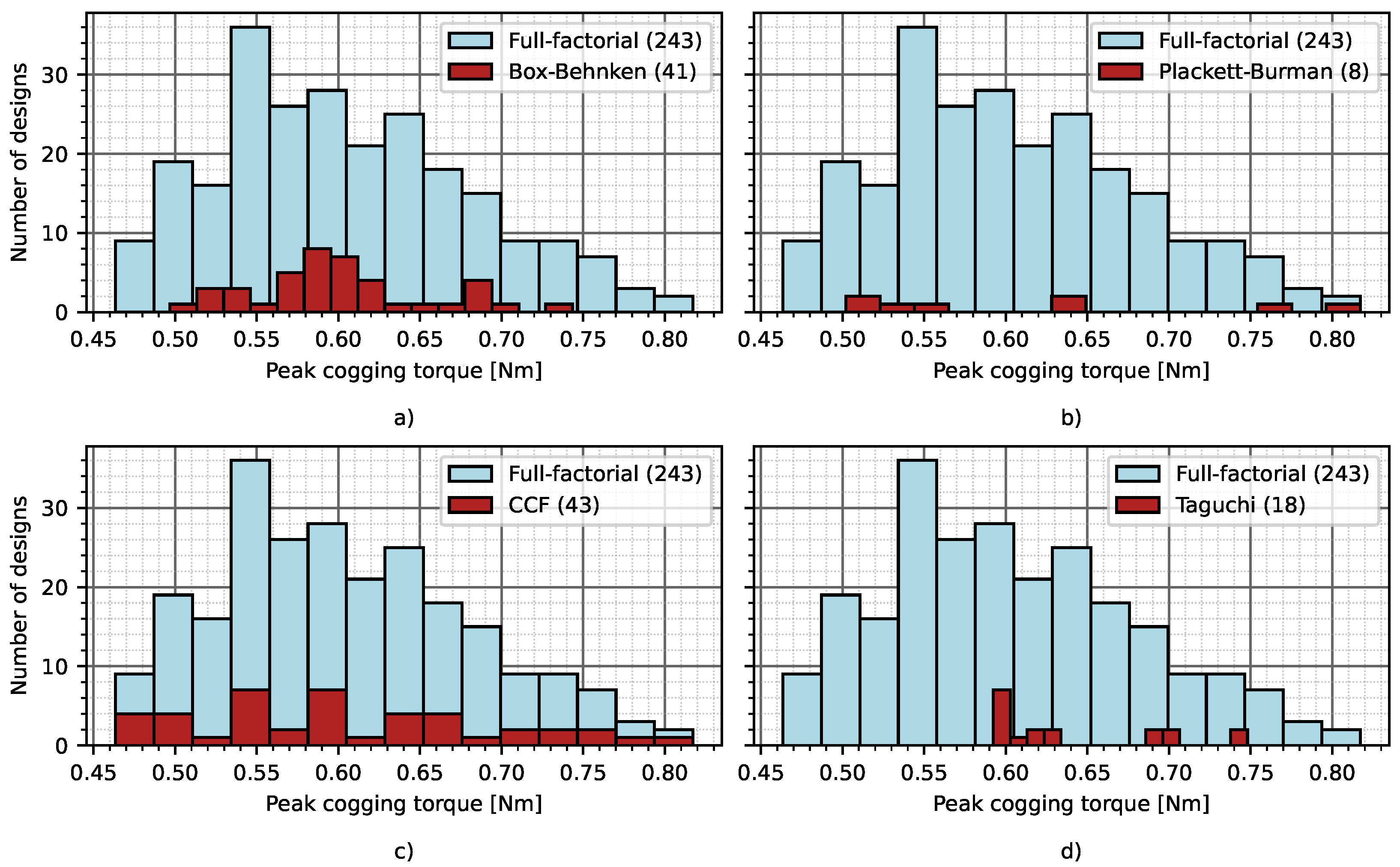
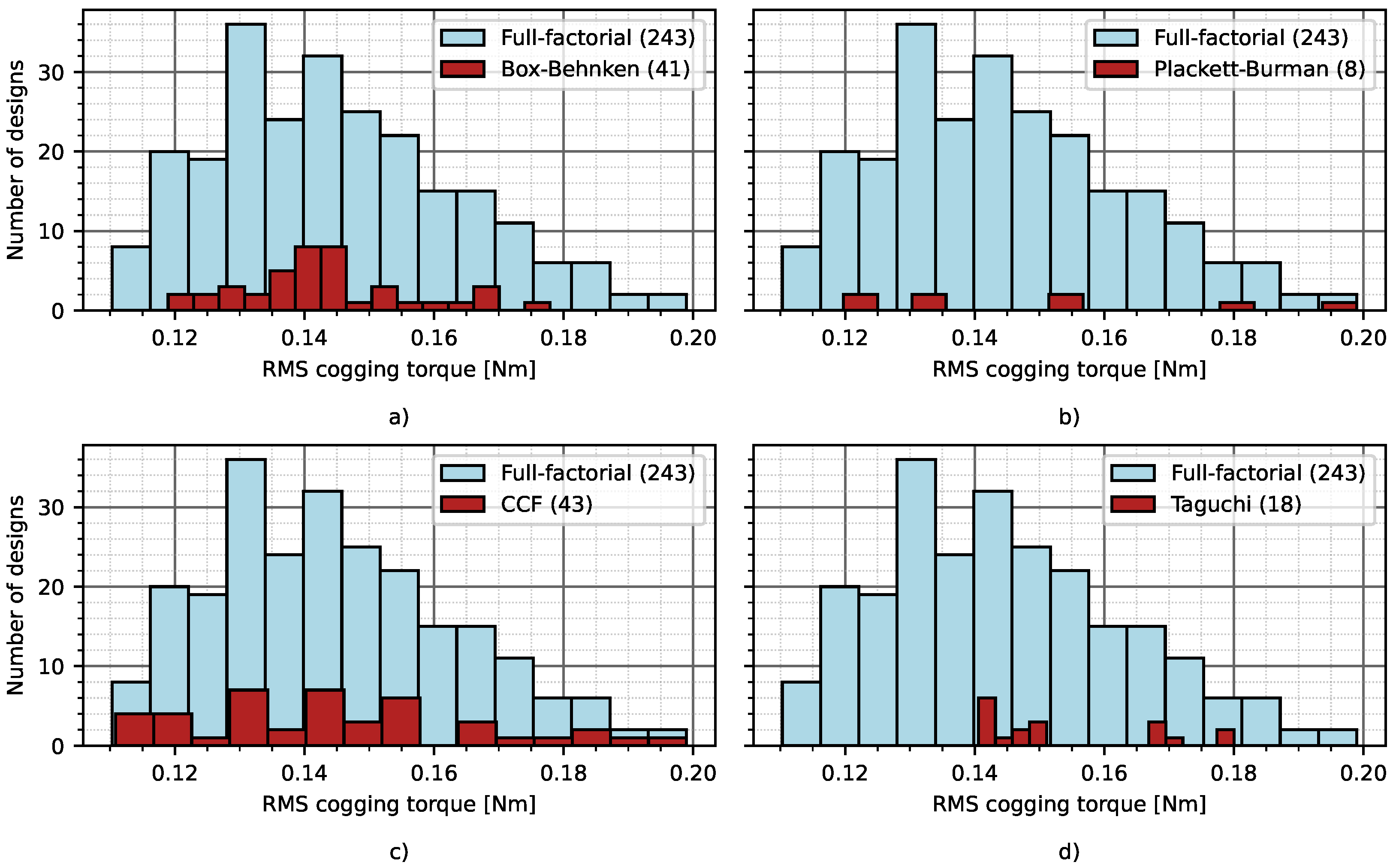
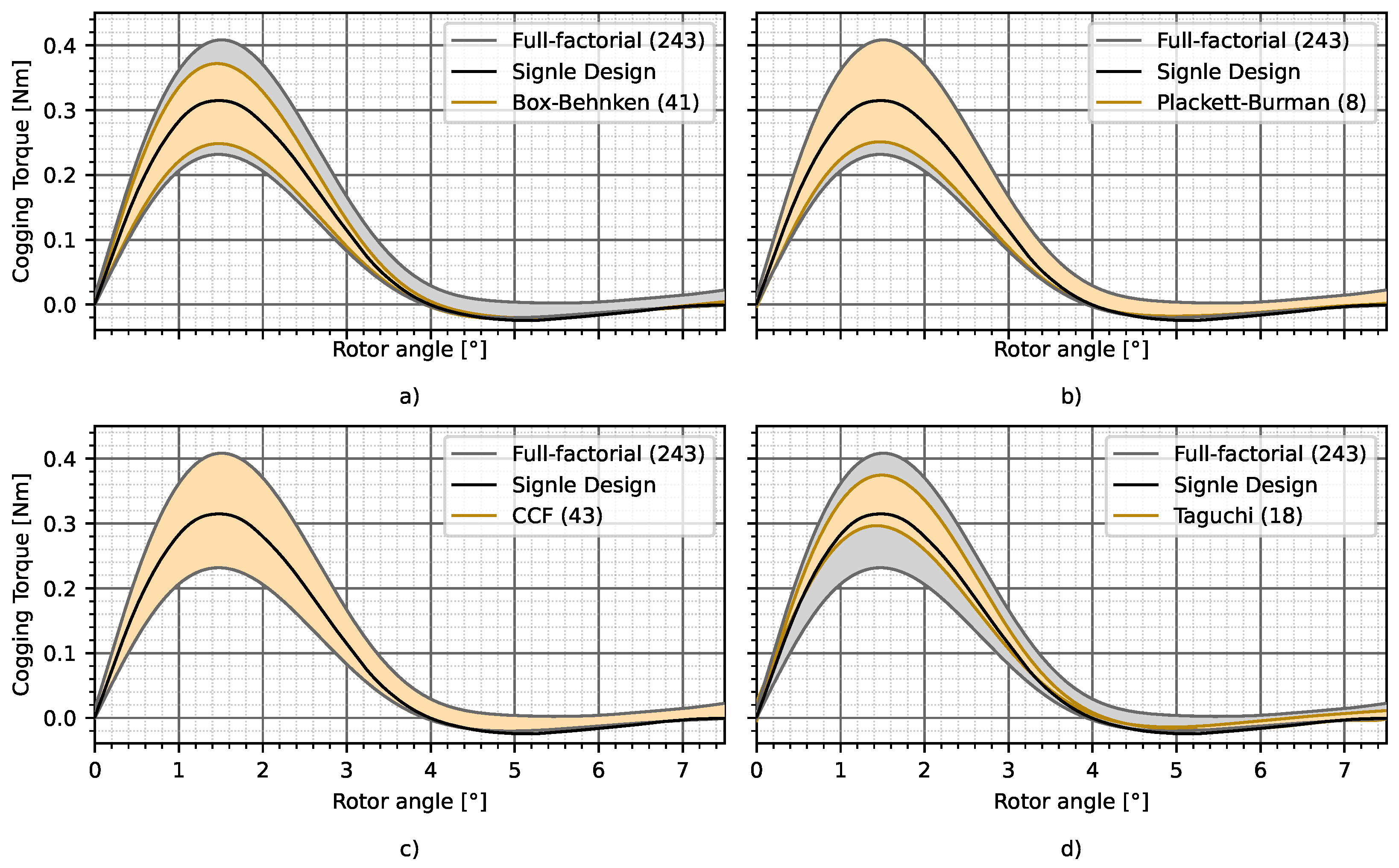
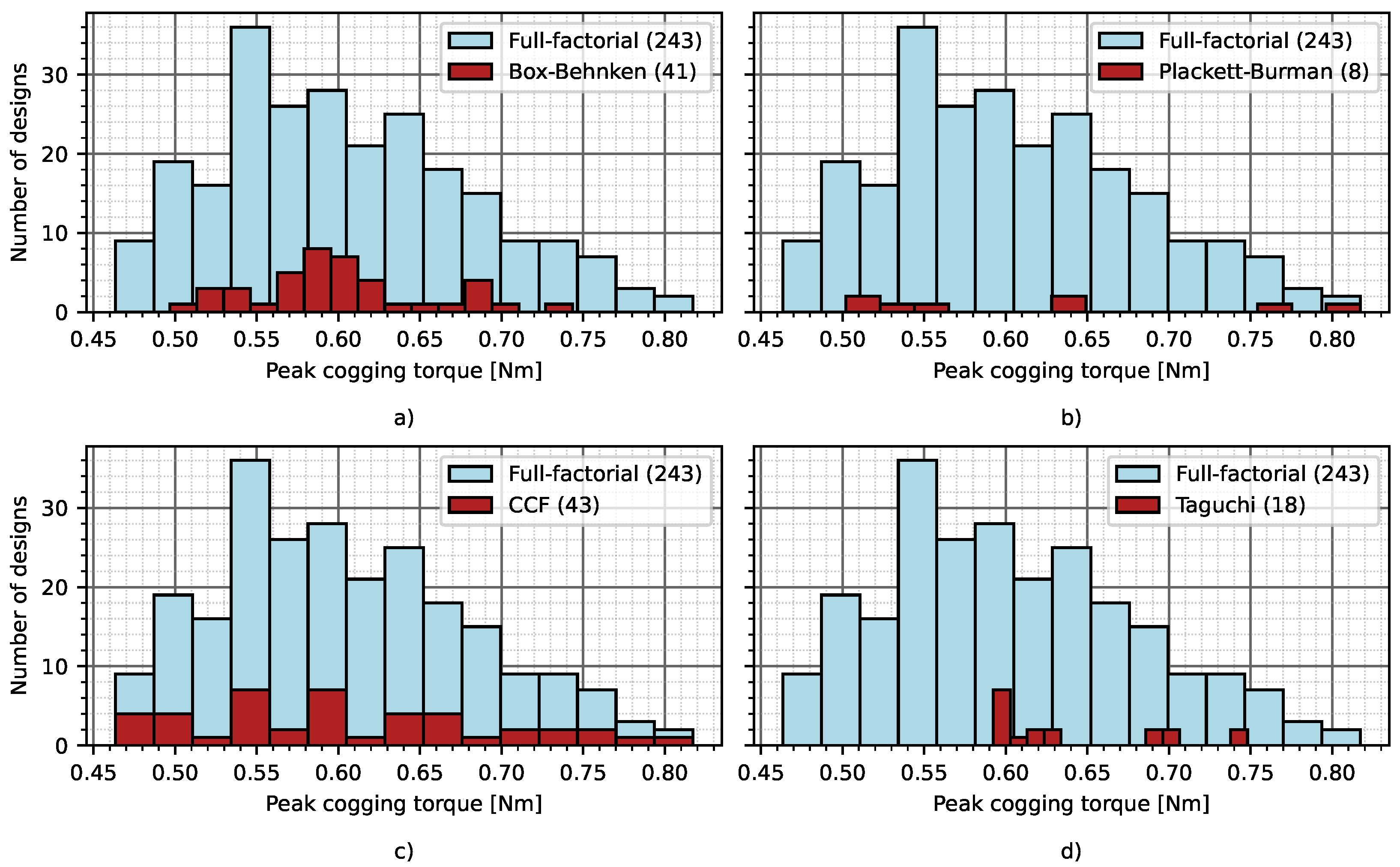
2.5. Tolerance Analysis
3. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bramerdorfer, G.; Lanser, S.; Amrhein, W. Multi-Harmonic Design and Optimization of PMSMs. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 7049–7056. [Google Scholar]
- Orosz, T.; Rassõlkin, A.; Kallaste, A.; Arsénio, P.; Pánek, D.; Kaska, J.; Karban, P. Robust Design Optimization and Emerging Technologies for Electrical Machines: Challenges and Open Problems. Appl. Sci. 2020, 10, 6653. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the strength Pareto evolutionary algorithm. TIK-Report 2001, 103. [Google Scholar] [CrossRef]
- De León-Aldaco, S.E.; Calleja, H.; Alquicira, J.A. Metaheuristic optimization methods applied to power converters: A review. IEEE Trans. Power Electron. 2015, 30, 6791–6803. [Google Scholar] [CrossRef]
- Coello, C.C.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation (CEC’02) (Cat. No. 02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar]
- Tenne, Y.; Goh, C.K. Computational Intelligence in Expensive Optimization Problems; Springer Science & Business Media: Berlin, Germany, 2010; Volume 2. [Google Scholar]
- Darwish, A. Bio-inspired computing: Algorithms review, deep analysis, and the scope of applications. Future Comput. Inform. J. 2018, 3, 231–246. [Google Scholar] [CrossRef]
- Sizov, G.Y.; Ionel, D.M.; Demerdash, N.A.O. A review of efficient FE modeling techniques with applications to PM AC machines. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Capabilities of finite element analysis and magnetic equivalent circuits for electrical machine analysis and design. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 4027–4033. [Google Scholar]
- Lei, G.; Zhu, J.; Guo, Y. Multidisciplinary Design Optimization Methods for Electrical Machines and Drive Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Bramerdorfer, G.; Zǎvoianu, A.C. Surrogate-Based Multi-Objective Optimization of Electrical Machine Designs Facilitating Tolerance Analysis. IEEE Trans. Magn. 2017, 53, 1–11. [Google Scholar] [CrossRef]
- Goetz, S.; Roth, M.; Schleich, B. Early Robust Design—Its Effect on Parameter and Tolerance Optimization. Appl. Sci. 2021, 11, 9407. [Google Scholar] [CrossRef]
- Taguchi, G. System of Experimental Design, Vols. 1 and 2; UNIPUB/Krauss International: White Plains, NY, USA, 1987. [Google Scholar]
- Matthiassen, B. Design for Robustness and Reliability: Improving the Quality Consciousness in Engineering Design; Department of Control and Engineering Design, DTU: Lyngby, Denmark, 1997. [Google Scholar]
- Melvin, J.W.; Deo, H.V. Axiomatically designed robustness. In Proceedings of the American Supplier Institute 19th Annual Taguchi Methods Symposium, Cambridge, MA, USA, 2002. [Google Scholar]
- Suh, N.P. Axiomatic Design: Advances and Applications; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
- Salimi, A.; Lowther, D.A. On the role of robustness in multi-objective robust optimization: Application to an IPM motor design problem. IEEE Trans. Magn. 2015, 52, 8102304. [Google Scholar] [CrossRef]
- Guimarães, F.G.; Lowther, D.A.; Ramírez, J.A. Multiobjective approaches for robust electromagnetic design. IEEE Trans. Magn. 2006, 42, 1207–1210. [Google Scholar] [CrossRef]
- Yoon, S.B.; Jung, I.S.; Hyun, D.S.; Hong, J.P.; Kim, Y.J. Robust shape optimization of electromechanical devices. IEEE Trans. Magn. 1999, 35, 1710–1713. [Google Scholar] [CrossRef]
- Ren, Z.; Pham, M.T.; Koh, C.S. Robust global optimization of electromagnetic devices with uncertain design parameters: Comparison of the worst case optimization methods and multiobjective optimization approach using gradient index. IEEE Trans. Magn. 2012, 49, 851–859. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A.; Dong, J.S. Confidence-based robust optimisation using multi-objective meta-heuristics. Swarm Evol. Comput. 2018, 43, 109–126. [Google Scholar] [CrossRef] [Green Version]
- Di Barba, P.; Mognaschi, M.E.; Lowther, D.A.; Sykulski, J.K. A benchmark TEAM problem for multi-objective Pareto optimization of electromagnetic devices. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Di Barba, P.; Mognaschi, M.E.; Lozito, G.M.; Salvini, A.; Dughiero, F.; Sieni, I. The benchmark TEAM problem for multi-objective optimization solved with CFSO. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–5. [Google Scholar]
- Karban, P.; Pánek, D.; Orosz, T.; Petrášová, I.; Doležel, I. FEM based robust design optimization with Agros and Ārtap. Comput. Math. Appl. 2020, 81, 618–633. [Google Scholar] [CrossRef]
- Gadó, K.; Orosz, T. Robust and Multi-Objective Pareto Design of a Solenoid. Electronics 2021, 10, 2139. [Google Scholar] [CrossRef]
- Bramerdorfer, G. Computationally efficient tolerance analysis of the cogging torque of brushless PMSMs. IEEE Trans. Ind. Appl. 2017, 53, 3387–3393. [Google Scholar] [CrossRef]
- Bramerdorfer, G. Tolerance analysis for electric machine design optimization: Classification, modeling and evaluation, and example. IEEE Trans. Magn. 2019, 55, 1–9. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems (Excerpt). In Transdisciplinary Perspectives on Complex Systems; Springer International Publishing: New York, NY, USA, 2016; Volume 23, pp. 889–896. [Google Scholar] [CrossRef]
- Rassõlkin, A.; Vaimann, T.; Kallaste, A.; Kuts, V. Digital twin for propulsion drive of autonomous electric vehicle. In Proceedings of the 60th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 7–9 October 2019. [Google Scholar]
- Rassolkin, A.; Orosz, T.; Demidova, G.L.; Kuts, V.; Rjabtšikov, V.; Vaimann, T.; Kallaste, A. Implementation of Digital Twins for electrical energy conversion systems in selected case studies. Proc. Est. Acad. Sci. 2021, 70, 19–40. [Google Scholar]
- Meeker, D. Finite element method magnetics. FEMM 2010, 4, 162. [Google Scholar]
- Kiss, G.M.; Kaska, J.; de Oliveira, R.A.H.; Rubanenko, O.; Tóth, B. Performance Analysis of FEM Solvers on Practical Electromagnetic Problems. arXiv 2020, arXiv:2009.04399. [Google Scholar] [CrossRef]
- Karban, P.; Mach, F.; Kůs, P.; Pánek, D.; Doležel, I. Numerical solution of coupled problems using code Agros2D. Computing 2013, 95, 381–408. [Google Scholar] [CrossRef]
- Kacker, R.N.; Lagergren, E.S.; Filliben, J.J. Taguchi’s orthogonal arrays are classical designs of experiments. J. Res. Natl. Inst. Stand. Technol. 1991, 96, 577. [Google Scholar] [CrossRef] [PubMed]
- Cimbala, J.M. Taguchi Orthogonal Arrays; Pennsylvania State University: State College, PA, USA, 2014. [Google Scholar]
- Giunta, A.; Wojtkiewicz, S.; Eldred, M. Overview of modern design of experiments methods for computational simulations. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; p. 649. [Google Scholar]
- Pánek, D.; Orosz, T.; Karban, P. Artap: Robust design optimization framework for engineering applications. In Proceedings of the 2019 Third International Conference on Intelligent Computing in Data Sciences (ICDS), Marrakech, Morocco, 28–30 October 2019; Volume 4. [Google Scholar]
- Kuczmann, M.; Szücs, A.; Kovács, G. Transformer Model Identification by Ārtap. Period. Polytech. Electr. Eng. Comput. Sci. 2021, 65, 123–130. [Google Scholar] [CrossRef]
- Ghoshal, D.; Bianchi, L.; Essiari, A.; Beach, M.; Paine, D.; Ramakrishnan, L. Science Capsule-Capturing the Data Life Cycle. J. Open Source Softw. 2021, 6, 2484. [Google Scholar] [CrossRef]
- Brinckman, A.; Chard, K.; Gaffney, N.; Hategan, M.; Jones, M.B.; Kowalik, K.; Kulasekaran, S.; Ludäscher, B.; Mecum, B.D.; Nabrzyski, J.; et al. Computing environments for reproducibility: Capturing the “Whole Tale”. Future Gener. Comput. Syst. 2019, 94, 854–867. [Google Scholar] [CrossRef]
- Lu, C.; Ferrari, S.; Pellegrino, G. Two design procedures for PM synchronous machines for electric powertrains. IEEE Trans. Transp. Electrif. 2016, 3, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Lehikoinen, A.; Davidsson, T.; Arkkio, A.; Belahcen, A. A high-performance open-source finite element analysis library for magnetics in MATLAB. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 486–492. [Google Scholar]
- Emetor Software. Available online: https://www.emetor.com (accessed on 20 October 2021).
- Kuptsov, V.; Fajri, P.; Trzynadlowski, A.; Zhang, G.; Magdaleno-Adame, S. Electromagnetic Analysis and Design Methodology for Permanent Magnet Motors Using MotorAnalysis-PM Software. Machines 2019, 7, 75. [Google Scholar] [CrossRef] [Green Version]
- Bonneel, P.; Le Besnerais, J.; Pile, R.; Devillers, E. Pyleecan: An open-source Python object-oriented software for the multiphysic design optimization of electrical machines. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 948–954. [Google Scholar]
- Andriushchenko, E.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A.; Heidari, H.; Tiismus, H. Optimization of a 3d-printed permanent magnet coupling using genetic algorithm and taguchi method. Electronics 2021, 10, 494. [Google Scholar] [CrossRef]
- Soo-Gyung, L.; Kim, S.; Min-Ro, P.; Lee, T.H.; Jung-Pyo, H. Sensitivity Analysis for Robust Performance of Electrical Machines Affected by Manufacturing Tolerance. In IET Conference Proceedings; The Institution of Engineering & Technology: Edinburgh, UK, 2019. [Google Scholar]
- Sorgdrager, A.; Wang, R.J.; Grobler, A. Taguchi method in electrical machine design. SAIEE Afr. Res. J. 2017, 108, 150–164. [Google Scholar] [CrossRef] [Green Version]
- Giunta, A.; Watson, L. A comparison of approximation modeling techniques-Polynomial versus interpolating models. In Proceedings of the 7th AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, St. Louis, MO, USA, 2–4 September 1998; p. 4758. [Google Scholar]
- Ma, B.; Lei, G.; Zhu, J.; Guo, Y.; Liu, C. Application-oriented robust design optimization method for batch production of permanent-magnet motors. IEEE Trans. Ind. Electron. 2017, 65, 1728–1739. [Google Scholar] [CrossRef]
- Antunes, O.; Bastos, J.; Sadowski, N. Using high-order finite elements in problems with movement. IEEE Trans. Magn. 2004, 40, 529–532. [Google Scholar] [CrossRef]
- Sliding Band Boundary Condition Example. Available online: https://www.femm.info/wiki/RotorMotion (accessed on 20 October 2021).
- Antunes, O.; Bastos, J.; Sadowski, N.; Razek, A.; Santandrea, L.; Bouillault, F.; Rapetti, F. Comparison between nonconforming movement methods. IEEE Trans. Magn. 2006, 42, 599–602. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| Parameter | Dimension | Value |
|---|---|---|
| Axial Length | mm | 50 |
| Rotor Inner Diameter | mm | 22.8 |
| Rotor Iron Outer Diameter | mm | 50.5 |
| Rotor Outer Diameter | mm | 55.1 |
| Magnet Width | mm | 15.9 |
| Air Gap Length | mm | 0.7 |
| Angle Spanned by Tooth | deg | 11.9 |
| Tooth width | mm | 4 |
| Tooth Root diameter | mm | 86.6 |
| Stator Outer Diameter | mm | 100 |
| Turns/Slot | - | 46 |
| Winding Wire | - | 4X20AWG copper wire |
| Magnet Material | - | Sm2Co17 24MGOe |
| Stator Material | - | 24 Gauge M19 NGO Steel @ 98% fill |
| Rotor Material | - | 1018 steel |
| Parameter | Dimension | Mean Value | Tolerance |
|---|---|---|---|
| Airgap | [mm] | 0.7 | 0.05 |
| Magnet height | [mm] | 3.577 | 0.05 |
| Magnet width | [mm] | 15.8566 | 0.05 |
| [kA/m] | 724 | 5 | |
| [-] | 1.11 | 0.05 |
| Design Methodology | ||||
|---|---|---|---|---|
| Mean | std | Mean | std | |
| Single Design | 0.57 | 0.015 | 0.136 | 0.05 |
| Full-Factorial | 0.603 | 0.077 | 0.145 | 0.019 |
| Box-Behnken | 0.6 | 0.054 | 0.144 | 0.013 |
| Plackett-Burman | 0.618 | 0.118 | 0.149 | 0.029 |
| Central-Composite | 0.606 | 0.09 | 0.145 | 0.022 |
| Taguchi | 0.642 | 0.055 | 0.154 | 0.013 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orosz, T.; Gadó, K.; Katona, M.; Rassõlkin, A. Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller. Processes 2021, 9, 2077. https://doi.org/10.3390/pr9112077
Orosz T, Gadó K, Katona M, Rassõlkin A. Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller. Processes. 2021; 9(11):2077. https://doi.org/10.3390/pr9112077
Chicago/Turabian StyleOrosz, Tamás, Krisztián Gadó, Mihály Katona, and Anton Rassõlkin. 2021. "Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller" Processes 9, no. 11: 2077. https://doi.org/10.3390/pr9112077
APA StyleOrosz, T., Gadó, K., Katona, M., & Rassõlkin, A. (2021). Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller. Processes, 9(11), 2077. https://doi.org/10.3390/pr9112077