1. Introduction
Chaotic phenomena exist frequently in many nonlinear engineering systems; the chaos dynamic behavior is unstable but bounded and contains infinite non-periodic trajectories in strange attractors. In particular, its state response is very sensitive to the initial values of states, and this is the well-known butterfly effect. Owing to its distinguished advantages in various research fields, chaos control and synchronization has increasingly received attention [
1,
2]. Particularly, its application to communication security is one of the most important topics in the research of chaos synchronization. By realizing chaos synchronization, the communication system can simultaneously obtain dynamical and random chaotic numbers at the transmitting and receiving ends, and then it becomes possible to further design the chaotic ciphers [
3]. Hence, many different synchronization control approaches have been reported in the literature, such as time-varying delay feedback control [
4], sliding mode control [
5,
6,
7], linear state feedback control [
8], fuzzy sliding mode control [
9,
10,
11], H-infinity stabilization [
12,
13] and adaptive control [
14,
15]. For controlled systems, there always exist unknown external perturbations or uncertainties, including unmodeled system dynamics and control input uncertainty due to the component nonlinearities and external disturbances. These disturbances often cause degradation or even failure of the control performance. Therefore, designing a robust control scheme to asymptotically suppress or eliminate the influence of unknown disturbances is a very important issue when discussing synchronization control for chaotic systems [
16], and some research works have been proposed by studying the effects of input uncertainties [
17,
18,
19]. By considering the uncertainties for control inputs, the state synchronization controller for two identical
n-dimensional chaotic systems was proposed in [
17], and the robust adaptive finite-time controller was reported for synchronization in [
18]. For second-order chaotic systems, the synchronization controller was proposed by the adaptive sliding mode control [
19]. To design a control system, sliding mode control (SMC) is an outstanding method due to the good transient performance, fast response and the robustness to uncertain system parameters or external disturbances, especially when the matching condition is satisfied [
20,
21]. By surveying the above-mentioned papers, it was found that the works [
2,
3,
4,
6,
8,
15,
20] only considered some special classes of chaotic systems, and the unavoidable uncertainty in control input was not considered. The reports in [
5,
6,
7,
11,
21] introduced the SMC approach to achieve robust synchronization. However, the perturbations of parameters were often considered only with the matched condition, and their approaches cannot cope with mismatched disturbances. In [
12,
13], the authors considered the synchronization for systems with mismatched disturbances, and the influence of mismatched disturbances was evaluated in the sense of H-infinity control. However, the uncertainty in the control input is not considered. In [
17,
18,
19], researchers took into account the effects of input uncertainties for synchronization controller design. However, only special types of chaotic systems and matched disturbances were considered. Furthermore, for the case of mismatched disturbances, the individual performances for every error state between master and slave systems could not be estimated in their works.
Based on the aforementioned, we aim to discuss the design of robust SMC controllers for synchronization between master and slave chaotic systems. In comparison with the past studies mentioned above, the advantages of the proposed SMC controller are not only that it achieves synchronization for generalized classes of chaotic systems even with input uncertainty and mismatched disturbances, but also that it gives a clear evaluation of synchronization performance for every error state. Furthermore, a proportional-integral (PI) switching function is introduced to avoid the reduced-order property in the traditional SMC such that it becomes easy to estimate the synchronization performance between master–slave systems in sliding manifold for mismatched disturbances. This proposed SMC can always drive the trajectories of the controlled dynamics to hit and enter the sliding mode and fully synchronize the master–slave systems in spite of matched uncertainties and input nonlinearity. As for the mismatched disturbances, the bounds of synchronization errors can be well estimated by utilizing the limit of the Riemann sum. Two simulation experiments including matched and mismatched cases are given to demonstrate the effectiveness of the proposed SMC design method.
Notations: is the identity matrix of , and represents the transpose for a matrix or vector. denotes the Euclidean norm of the vector . is the eigenvalues of matrix . is the matrix norm of A. and is the sign function of s, if = 1; if ; if .
2. System Definition and Problem Statement
The goal of this study is to design an SMC to solve the robust synchronization problem of master–slave chaotic systems even with mismatched disturbances and uncertainty in the control. We consider a general form in (1), which can describe many chaotic systems, such as four-dimensional generalized Lorenz–Stenflo system, the unified chaotic system, Sprott system, Rossler system, Lorenz system, Duffing oscillator, Chua’s circuit, etc. A general form for master chaotic systems is described by
Master chaotic system:
and the slave chaotic system with undesired input uncertainty and matched/mismatched is described as follows.
Slave chaotic system:
where
,
are system matrices. The matrix pair
is controllable, meaning that the controllability matrix
has full row rank (i.e.,
).
represents the mismatched matrix of systems,
,
,
,
,
,
,
and
are the state vector of master systems, the state vector of slave systems, the input vector, the unknown but bounded input perturbation, the master system nonlinear vector, the slave system nonlinear vector, the unknown but bounded nonlinear disturbance of the slave system and the mismatched disturbance vector, respectively. Besides the unknown disturbance satisfies
and is assumed to be bounded by
,
. The unknown
is also bounded by
, and the input uncertainty satisfies
and
.
Considering (1) and (2), we have the following error state equation.
where
.
Here the control goal is to present a design procedure of SMC controller robust to bounded input uncertainty and to solve the chaos synchronization problem. To complete this synchronization controller design, two steps are included. First, it is necessary to choose an appropriate switching surface such that the error dynamics in the sliding manifold can be easily analyzed and the error bounds for matched/mismatched disturbances can be estimated. Second, a robust SMC is necessary to guarantee the hitting condition and keep the system trajectories in the sliding manifold even under the influence of input uncertainty. In the following section, we will discuss the designs of a switching surface and robust SMC controller.
3. Switching Surface Design and Performance Estimation in the Sliding Manifold
To complete the above design steps, we first introduce a PI sliding surface that can avoid the reduce order property in the traditional SMC and make it easy to estimate and analyze the error dynamics when the controlled system is driven to the sliding manifold. We choose the PI switching surface, which is defined as follows
where
is the generalized inverse satisfying
,
is the control gain matrix selected such that the eigenvalues
of matrix
are different real numbers and satisfy
.
Differentiating (4), we obtain
Assume the system is in the sliding manifold for
(
is the hitting time), i.e.,
and
, the equivalent control
can be obtained from (5) with
as
Substituting (6) into (3), we can have the synchronization error dynamics in the sliding manifold as
where
.
As is well known, since matrix pair (
A,
B) is controllable, we can easily obtain a specified matrix
K by using the pole assignment approach such that all eigenvalues of
satisfy
. Solving (7), one has the solution of
for
(
is the hitting time) as
Next, selecting a matrix to transform the matrix to be diagonal and satisfy , where is the independent eigenvector corresponding to eigenvalue of matrix .
From (8), by introducing the fact of
, one has
The solution of every
can be individually obtained as
where
is
-row of
.
According to (10), we have
Next, introducing the limit of the Riemann sum [
22], the term of
in (11) can be described as below
where
and
Thus, we have
By substituting (13) into (11), the bound of every
for
can be estimated by
Since
is specified, we can estimate the bounds
of
as
Remark 1. If the uncertain slave system (2) is only subjected to matched uncertainties (i.e., the matrix can be represented asfor some matrix), then we have. According to (15), one can conclude that when the controlled system is with matched uncertainties and disturbances, the synchronization errors can fully converge to zero, i.e., .
From above discussion, we can estimate the individual bound of synchronization errors in the sliding manifold for matched/mismatched disturbances. However, the bounds are obtained for the systems in the sliding manifold. Therefore, we still need to propose an SMC controller robust to input uncertainty to guarantee the sliding motion of .
4. Robust SMC Controller Design
Before continuing the SMC controller design, the following hitting condition based on the Lyapunov stability theorem is presented to ensure the existence of the sliding manifold.
Lemma 1. The trajectory of the error dynamics (3) always converges to the sliding surface, if the following hitting condition is satisfied
Proof. According to Lyapunov stability theory, we select a Lyapunov function for all . Obviously, condition (16) implies that . Therefore, as well as the switching function can converge to zero.
For satisfying the hitting condition (16), the SMC control input subjected to bounded uncertainty is proposed as
where
. □
Theorem 1. Consider the uncertain error dynamics (3) with bounded input uncertainty, the system trajectory controlled by the SMC controller (17) can asymptotically converge to the sliding manifold.
Proof. By introducing (3) and the SMC controller (17) into
, we obtain
Since
for the input uncertainty, we have
From (19), we have
and
By substituting (17) into (21), we have
Multiplying
into (22) yields
By using the fact of
, we have
From (24), we can conclude
Hence, from (18) and (25), we have
Furthermore, since
and
are selected, we have
Thus, according to Lemma 1, one can conclude that the system trajectory asymptotically converges to the sliding manifold . □
Remark 2. From the theoretical point of view, the discontinuous sign function in control input (17) may cause chattering. To reduce the chattering resulted from the discontinuous sign function, we can introduce the continuous saturation function described bywhereis sufficiently small. Obviously, when
is sufficiently small, then
can be approximated by
and the control input
can be modified as the following control law [
23].
where
.
Obviously, the continuous controller (29) with a sufficiently small value of can approach the discontinuous controller (17) very closely.
Remark 3. According to the above discussion, we can systematize the design procedure for robust chaos synchronization as follows.
- Step 1:
Construct the master–slave systems as (1), (2) and check the controllability of matrix pair.
- Step 2:
With the controllable matrix pair, using any available pole assignment approach to calculate the gain matrixsuch that the eigenvaluesof matrixin (7) are all different and satisfy, to guarantee a stable sliding manifold.
- Step 3:
construct the PI type-switching functionby (4).
- Step 4:
Find independent eigenvectors corresponding to eigenvalueof matrixand construct the transform matrix.
- Step 5:
According to (15), calculate the error bounds.
- Step 6:
Obtain the SMC synchronization controller from (17) or (29).
5. Numerical Simulation Results
In this section, we give two examples to demonstrate the availability of the proposed robust SMC synchronization controller for the Sprott chaotic circuit [
24] and four-dimensional generalized Lorenz–Stenflo systems [
25].
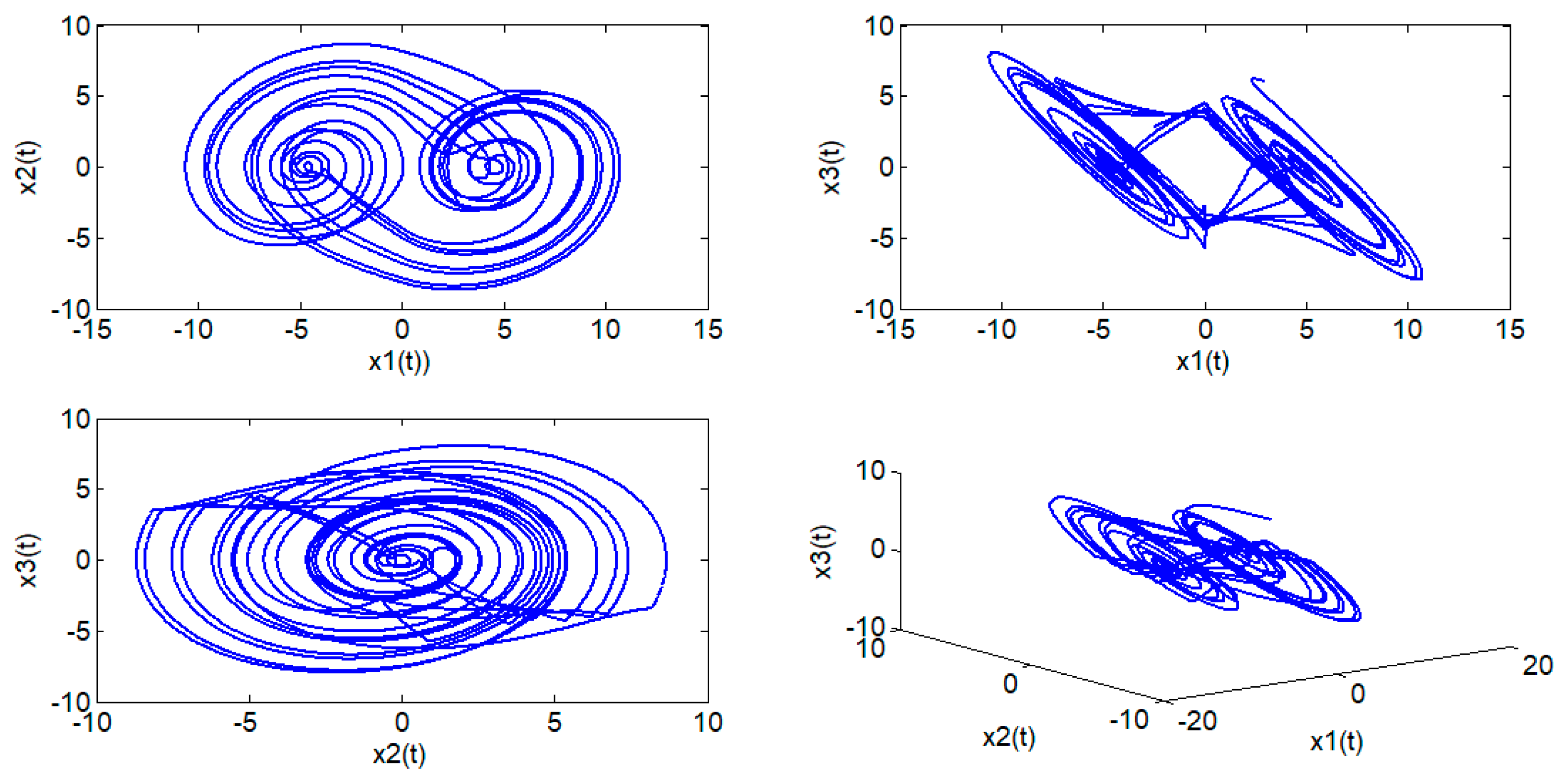
Example 1. In this example, we show that the proposed SMC controller can synchronize chaotic systems only using a single input. We consider the Sportt chaotic system [24] described bywhere, are the state variables andare system parameters. System (30) exhibits chaotic strange attractors, as shown in
Figure 1 when
,
,
and
. Obviously, we can rewrite (30) in the form of (1).
where
,
,
.
According to Remark 3, we construct the master–slave systems as:
Moreover, the matched and mismatched disturbances and uncertain uncertainty in control input are given as
We can easily check that the pair is controllable.
From (34), we have .
According to Step 2 in Remark 3, we can easily select the gain matrix
such that
to result in a stable sliding mode. And we can design the switching function
with
as
And eigenvector matrix
corresponding to eigenvalues of matrix
is obtained as
In the following, according to the matrix , we split it into mismatched and matched conditions to discuss.
Now we examine the mismatched case by assuming
. The proposed SMC
is utilized to synchronize the master–slave systems given in (32) and (33). To reduce the chatting phenomenon, we replace the sign function with the saturation function (29). Therefore, the sliding mode control with saturation function is given as
The simulation results with the initial values of
and
. The upper bound
of every synchronization error state can be estimated according to (15) and obtained as
,
and
. Then, the synchronization error responses with estimated bounds, the time response of SMC controller and the sliding surface are presented in
Figure 2 and
Figure 3, respectively.
We continue to simulate the matched case by assuming
. In the simulation, we also use the same conditions as those in case (i). The synchronization error trajectories for every
are presented in
Figure 4. Observing
Figure 4, the synchronization errors with matched disturbances exactly converge to zero as concluded in Remark 1.
Example 2. A four-dimensional generalized Lorenz–Stenflo system [25] is considered as followswhere, are the state variables andare positive parameters. System (38) exhibits hyperchaotic strange attractors, as shown in
Figure 5 with
,
.
System (38) can be also rewritten by the general form as
where
,
,
.
We can easily check that is controllable with , .
According to Remark 3, we construct the master–slave systems as
In addition, for simulation, the following terms are given as
From (42), we have .
According to Step 2 in Remark 3, we can obtain the gain matrix
such that
to result in a stable sliding mode. We can also design the switching function
with
as
And eigenvector matrix corresponding to eigenvalues of matrix
is obtained as
Now we check the mismatched case by assuming
In order to reduce the chattering, we also use the saturation function (29) to replace the discontinuous sign function. Therefore,
with continuous saturation function can be obtained as
The simulation results are obtained with the initial values of
. As described above, the bounds of every synchronization error state
can be predicted as
,
,
and
. Then, the synchronization error responses with predicted bounds, the time response of SMC controller and the sliding surface are presented in
Figure 6 and
Figure 7, respectively.
Now we continue to study the matched case. The matrix
is given as
In the simulation, we use the same conditions as those in case (i) except the disturbance matrix
. Then, the synchronization error trajectories of every
are presented in
Figure 8. Observing
Figure 8, the synchronization error under matched disturbances can converge to zero as discussed.
Obviously, according to the simulation results illustrated in Examples 1 and 2, it reveals that the presented robust SMC controller can not only robustly suppress the synchronization errors for matched disturbances, but also predict the synchronization error bounds for mismatched disturbances. The chattering is also reduced by the saturation function. However, a slight influence due to the replacement of the sign function by the saturation function can be observed, but the results are acceptable.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







