
Analysis of a Novel Two-Dimensional Lattice Hydrodynamic Model Considering Predictive Effect

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
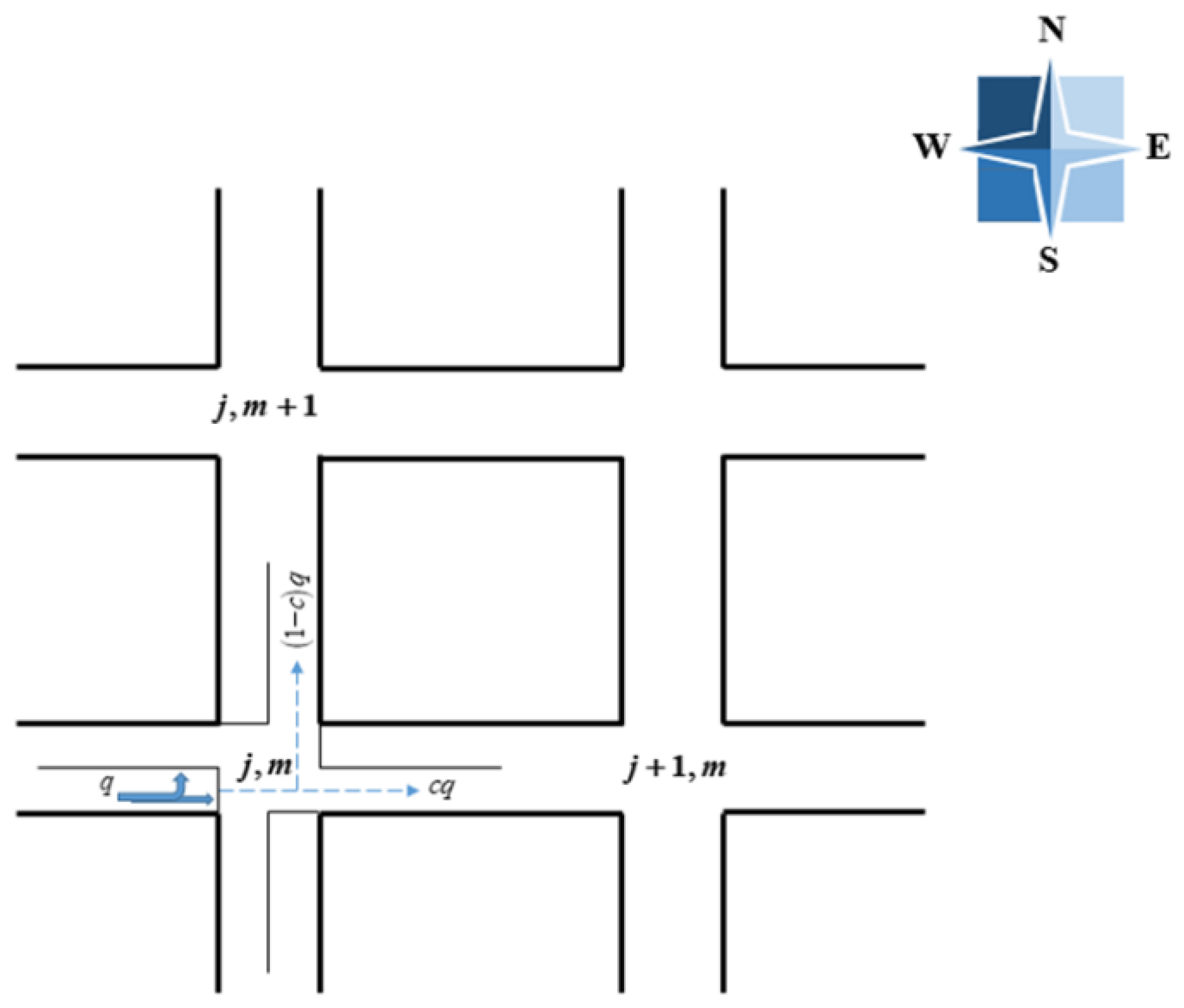
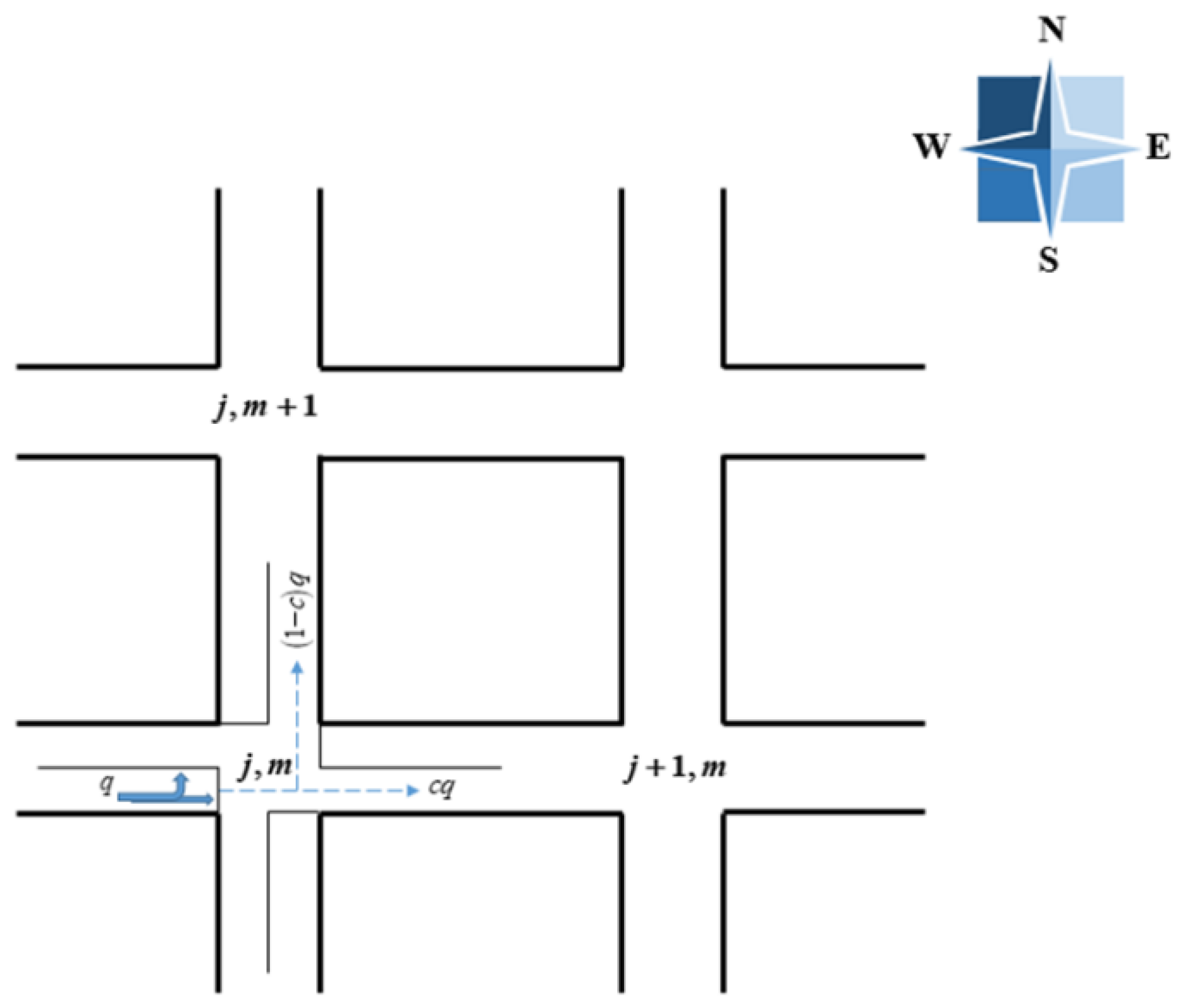
2. Methods: The Novel Two-Dimensional Lattice Model Considering Driver’s Predictive Effect
3. Discussion
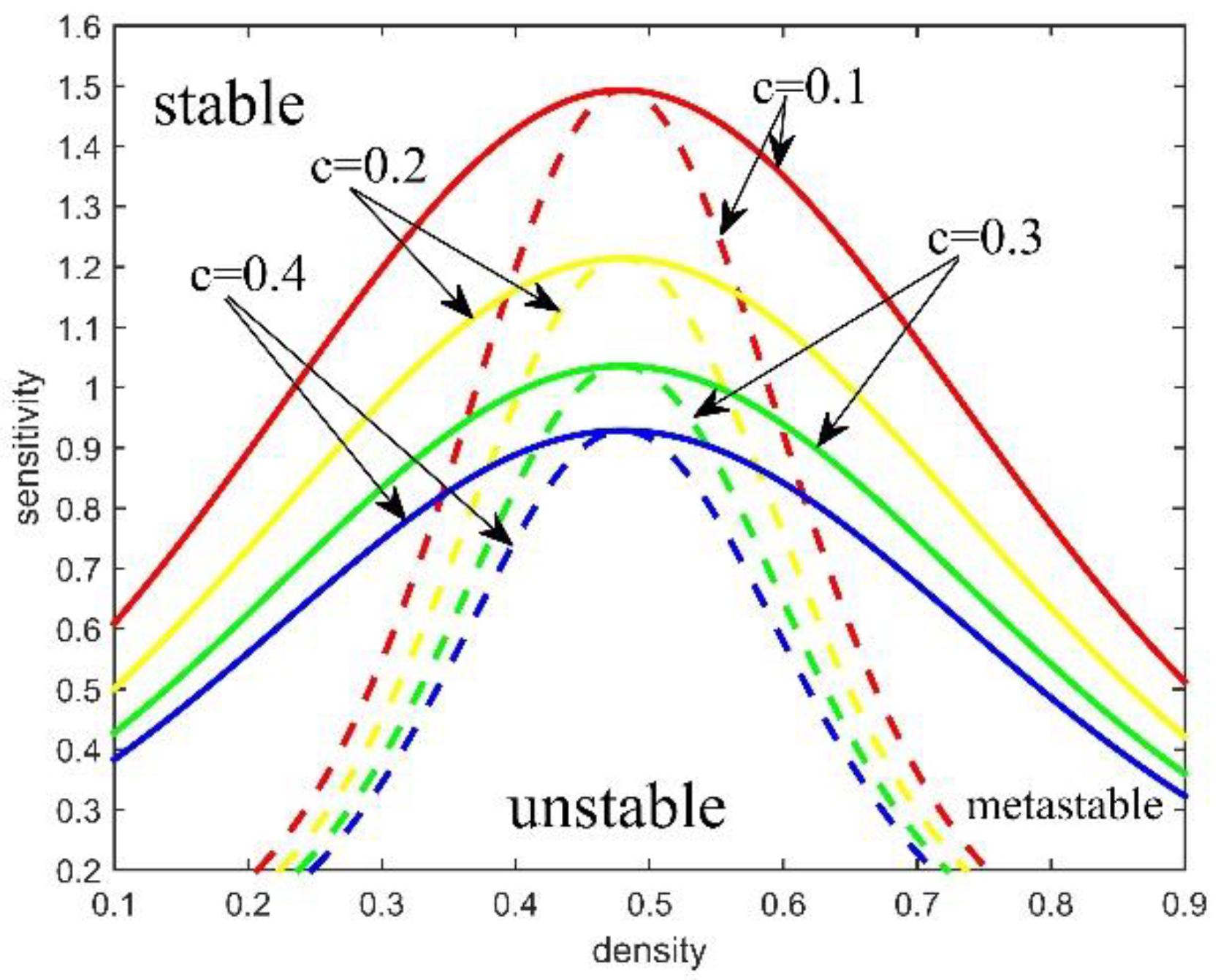
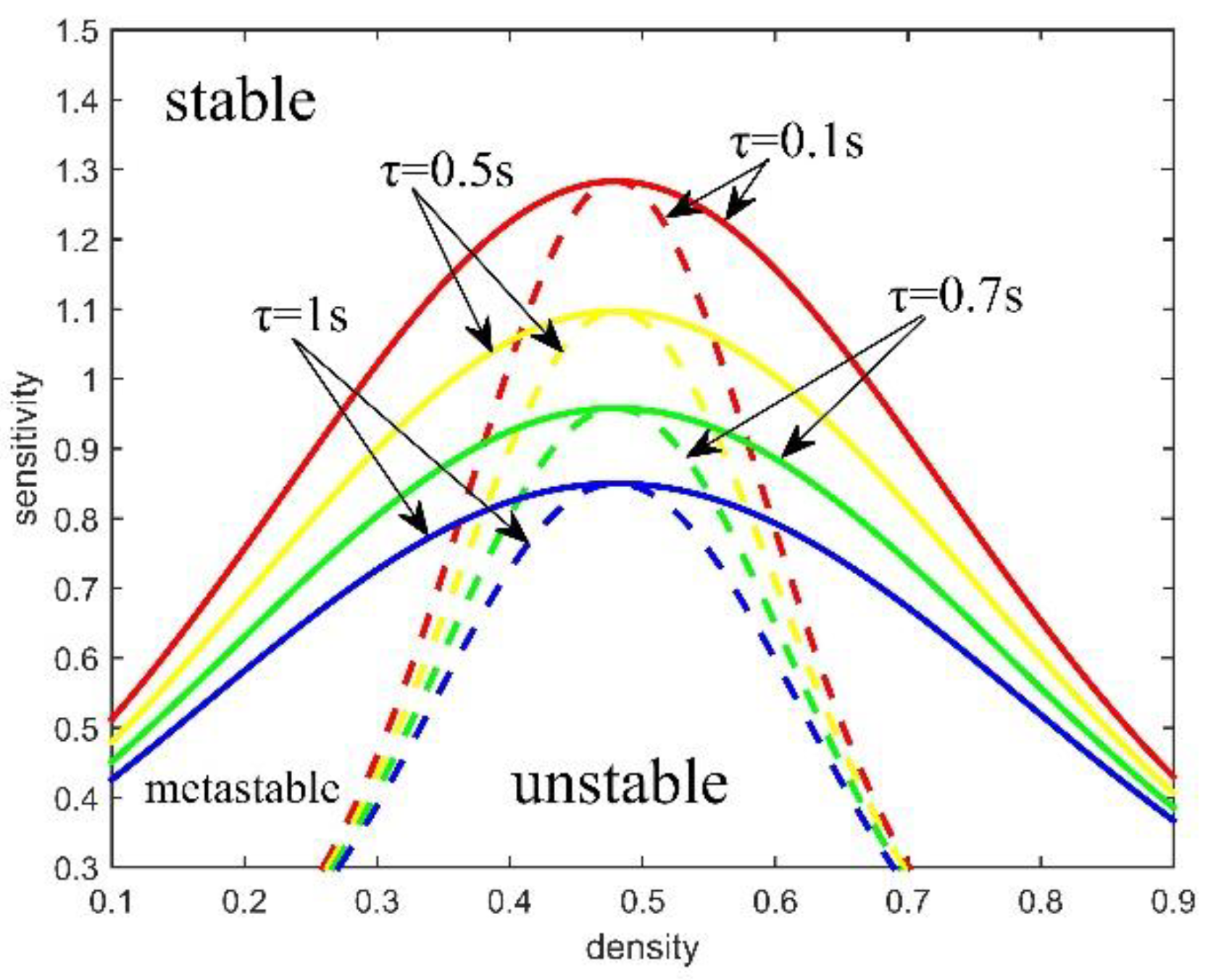
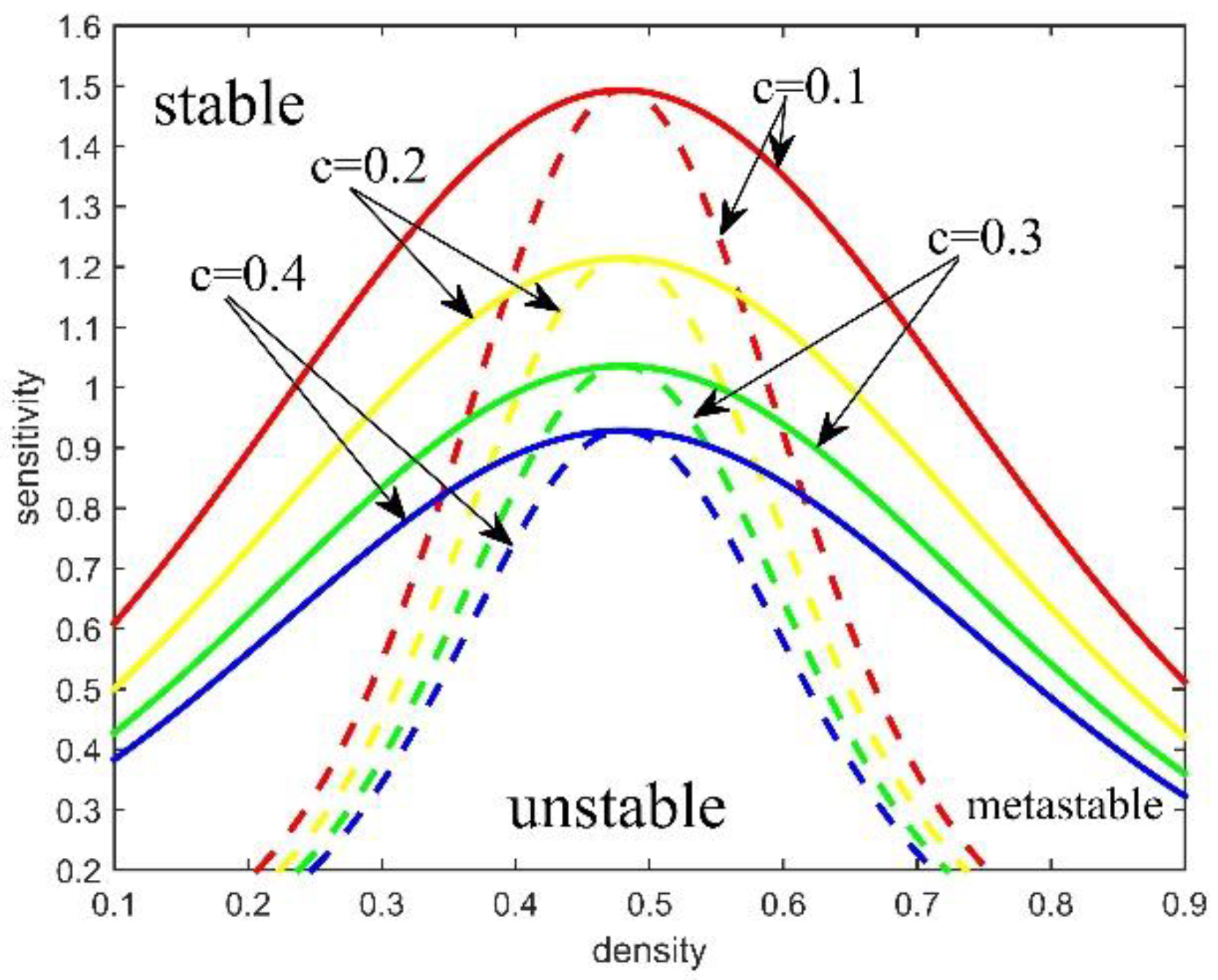
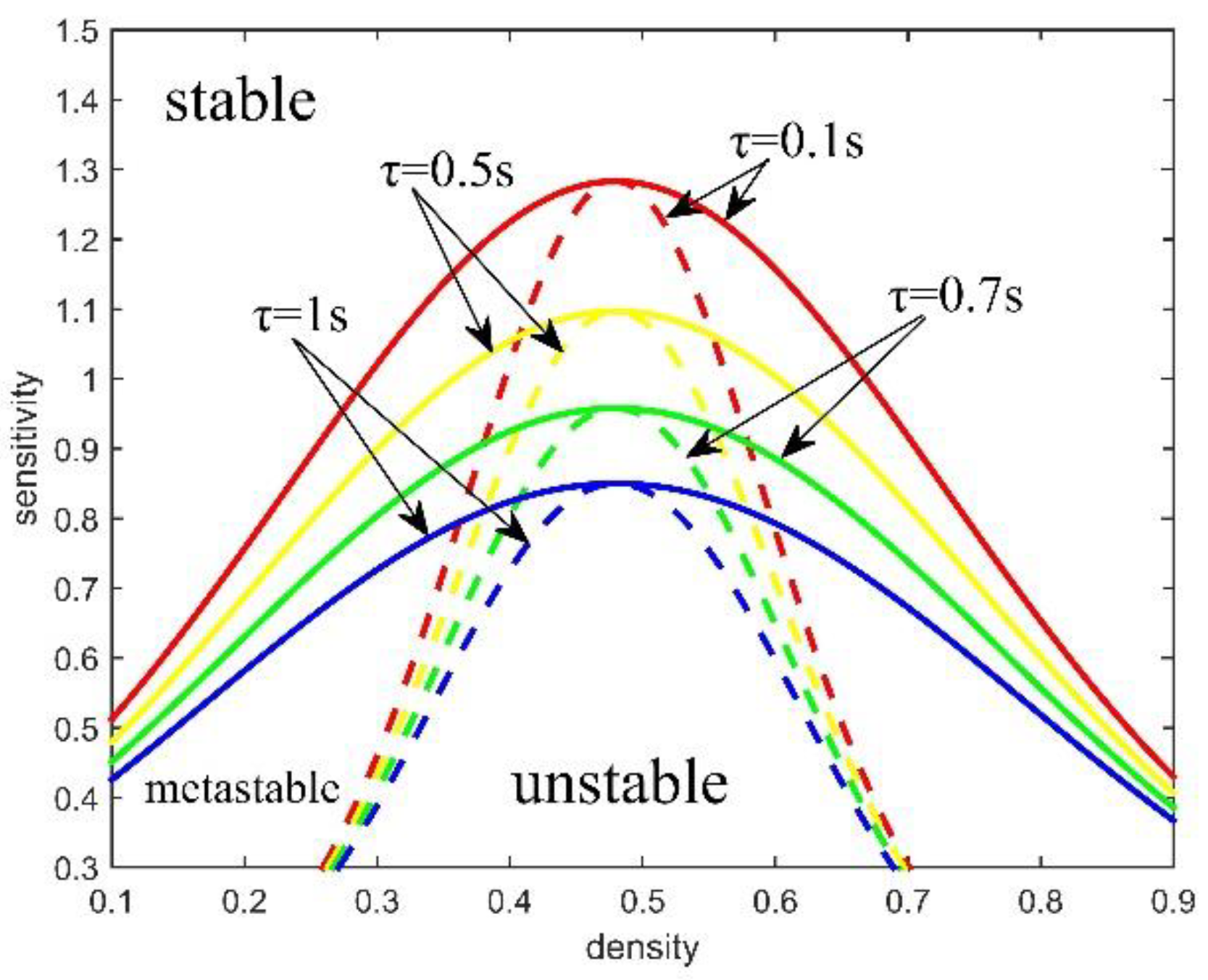
3.1. Linear Stability Analysis
3.2. Nonlinear Analysis
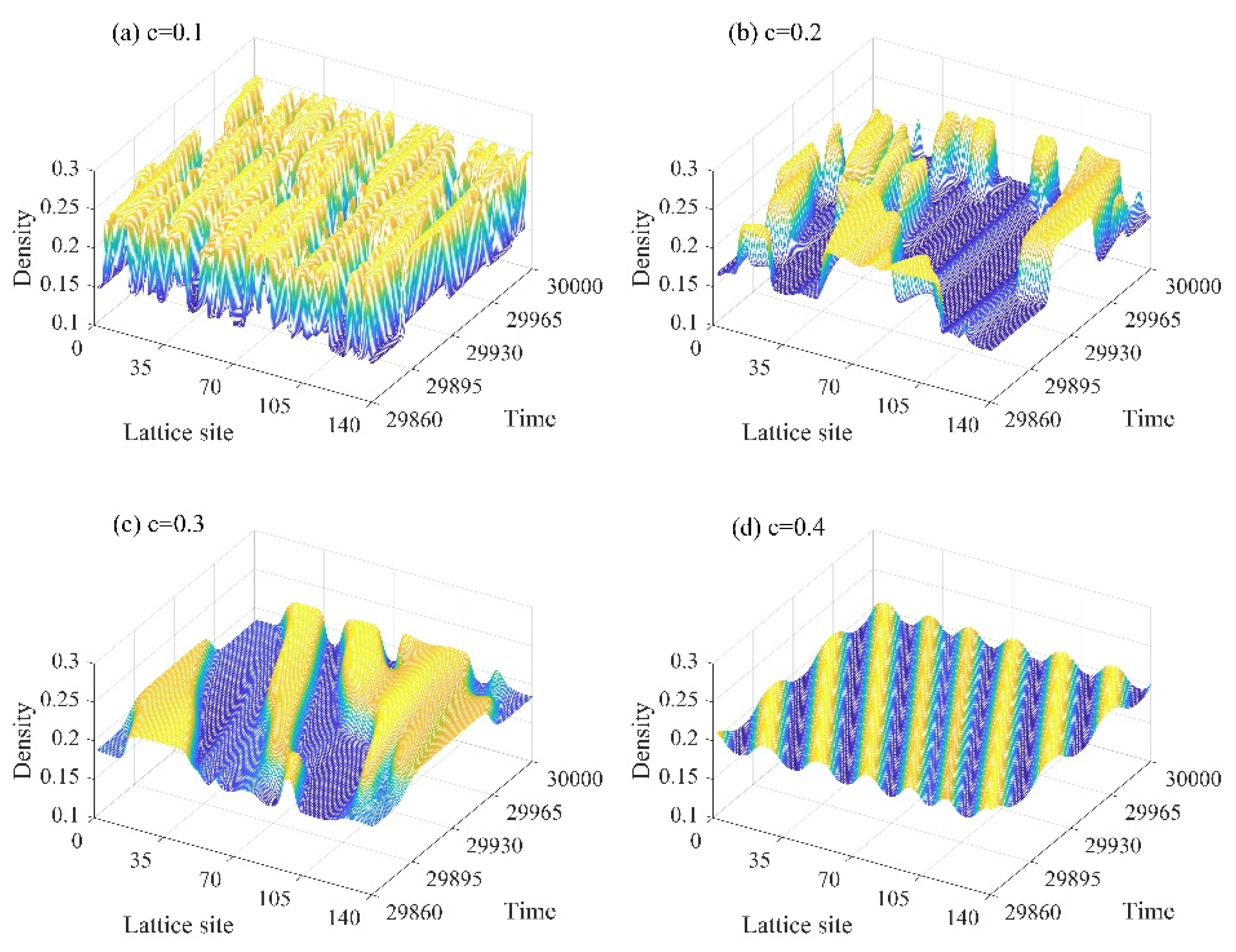
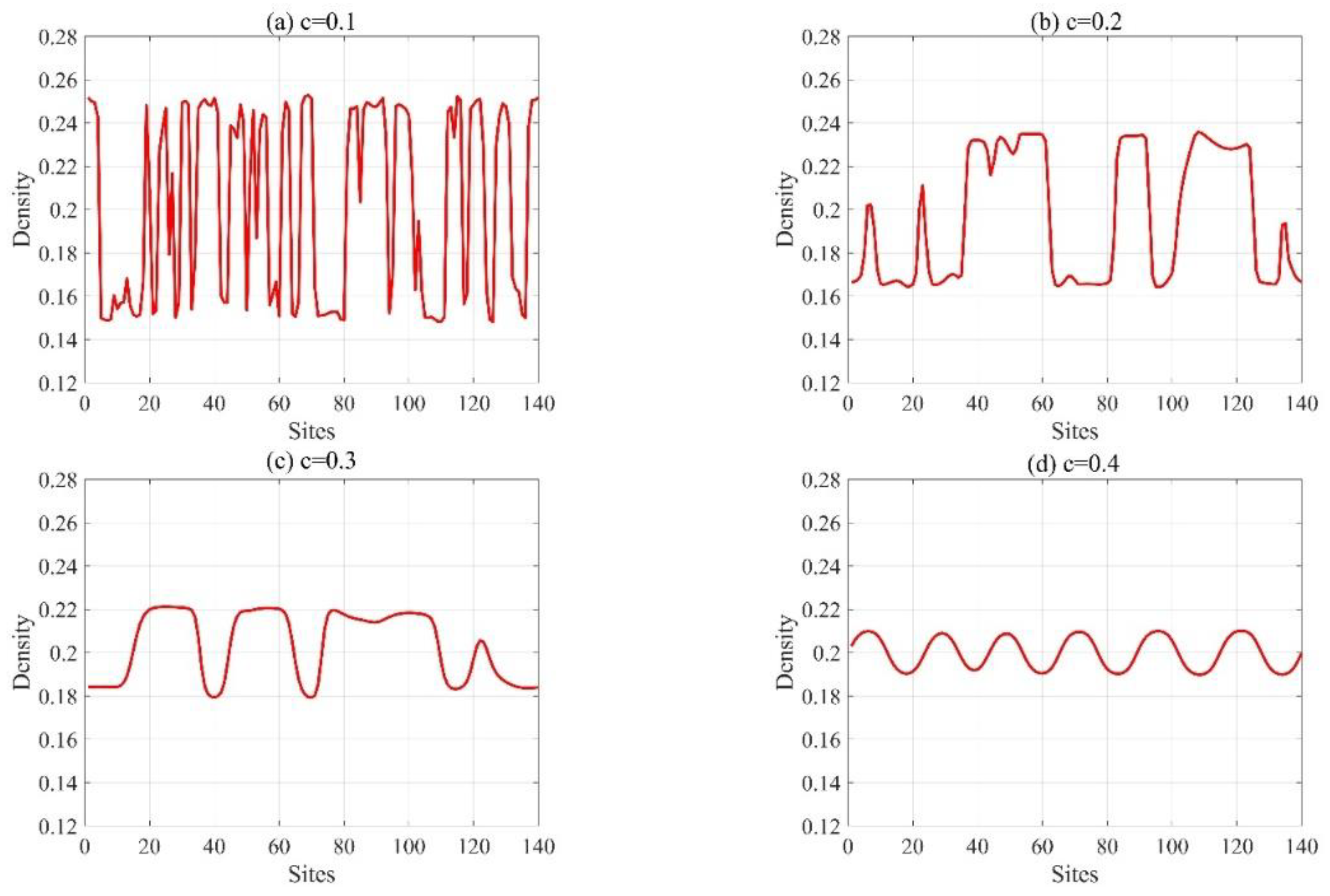
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yu, S.; Shi, Z. Analysis of car-following behaviors considering the green signal countdown device. Nonlinear Dyn. 2015, 82, 731–740. [Google Scholar] [CrossRef]
- Zhu, W.; Li, D. A new car-following model for autonomous vehicles flow with mean expected velocity field. Phys. A Stat. Mech. Appl. 2018, 492, 2154–2165. [Google Scholar]
- Zhu, W.; Zhang, H. Analysis of mixed traffic flow with human-driving and autonomous cars based on car-following model. Phys. A Stat. Mech. Appl. 2018, 496, 274–285. [Google Scholar] [CrossRef]
- Ou, H.; Tang, T. An extended two-lane car-following model accounting for inter-vehicle communication. Phys. A Stat. Mech. Appl. 2018, 495, 260–298. [Google Scholar] [CrossRef]
- Ngoduy, D. Effect of the car-following combinations on the instability of heterogeneous traffic flow. Transp. B Transp. Dyn. 2015, 3, 44–58. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X. Human-like autonomous car-following model with deep reinforcement learning. Transp. Res. Part C Emerg. Technol. 2018, 97, 348–368. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Qu, S. A sequence to sequence learning based car-following model for multi-step predictions considering reaction delay. Transp. Res. Part C Emerg. Technol. 2020, 120, 102785. [Google Scholar] [CrossRef]
- An, S.; Xu, L.; Qian, L. Car-following model for autonomous vehicles and mixed traffic flow analysis based on discrete following interval. Phys. A Stat. Mech. Appl. 2020, 560, 125246. [Google Scholar] [CrossRef]
- Xue, Y.; Zhang, Y.; Fan, D. An extended macroscopic model for traffic flow on curved road and its numerical simulation. Nonlinear Dyn. 2019, 95, 3295–3307. [Google Scholar] [CrossRef]
- Peng, G.; Song, W.; Peng, Y. A novel macro model of traffic flow with the consideration of anticipation optimal velocity. Phys. A Stat. Mech. Appl. 2014, 398, 76–82. [Google Scholar] [CrossRef]
- Cheng, R.; Ge, H.; Wang, J. An extended continuum model accounting for the driver’s timid and aggressive attributions. Phys. Lett. A 2017, 381, 1302–1312. [Google Scholar] [CrossRef]
- Cheng, R.; Wang, Y. An extended lattice hydrodynamic model considering the delayed feedback control on a curved road. Phys. A Stat. Mech. Appl. 2019, 513, 510–517. [Google Scholar] [CrossRef]
- Zhai, Q.; Ge, H.; Cheng, R. An extended continuum model considering optimal velocity change with memory and numerical tests. Phys. A Stat. Mech. Appl. 2018, 490, 774–785. [Google Scholar]
- Cheng, R.; Ge, H.; Wang, J. The nonlinear analysis for a new continuum model considering anticipation and traffic jerk effect. Appl. Math. Comput. 2018, 332, 493–505. [Google Scholar]
- Davoodi, N.; Soheili, A.; Hashemi, S. A macro-model for traffic flow with consideration of driver’s reaction time and distance. Nonlinear Dyn. 2016, 83, 1621–1628. [Google Scholar] [CrossRef]
- Nagatani, T. Modified KdV equation for jamming transition in the continuum models of traffic. Phys. A Stat. Mech. Appl. 1998, 261, 599–607. [Google Scholar] [CrossRef]
- Nagatani, T. Jamming transition and the modified Kortweg-de Vries equation in a two-lane traffic flow. Phys. A Stat. Mech. Appl. 1999, 265, 297–310. [Google Scholar] [CrossRef]
- Nagatani, T. TDGL and MKdV equations for jamming transition in the lattice models of traffic. Phys. A Stat. Mech. Appl. 1999, 264, 581–592. [Google Scholar] [CrossRef]
- Cao, J.; Shi, Z. Analysis of a novel two-lane lattice model on a gradient road with the consideration of relative current. Commun. Nonlinear Sci. Numer. Simul. 2016, 33, 1–18. [Google Scholar] [CrossRef]
- Peng, G.; Kuang, H.; Qing, L. A new lattice model of traffic flow considering driver’s anticipation effect of the traffic interruption probability. Phys. A Stat. Mech. Appl. 2018, 507, 374–380. [Google Scholar] [CrossRef]
- Zhao, H.; Xia, D.; Yang, S. The delayed-time effect of traffic flux on traffic stability for two-lane freeway. Phys. A Stat. Mech. Appl. 2020, 105, 106308. [Google Scholar] [CrossRef]
- Wang, T.; Cheng, R.; Ge, H. Analysis of a novel two-lane lattice hydrodynamic model considering the empirical lane changing rate and the self-stabilization effect. IEEE Access 2019, 540, 123066. [Google Scholar] [CrossRef]
- Wang, J.; Sun, F.; Ge, H. An improved lattice hydrodynamic model considering the driver’s desire of driving smoothly. Phys. A Stat. Mech. Appl. 2019, 515, 119–129. [Google Scholar] [CrossRef]
- Wu, X.; Zhao, X.; Song, H.; Xin, S.; Yu, S. Effects of the prevision relative velocity on traffic dynamics in the ACC strategy. Phys. A Stat. Mech. Appl. 2019, 515, 192–198. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef]
- Zhu, W.; Yu, R. Nonlinear analysis of traffic flow on a gradient highway. Phys. A Stat. Mech. Appl. 2012, 391, 964–965. [Google Scholar] [CrossRef]
- Gupta, A.; Sharma, S.; Redhu, P. Analyses of lattice traffic model on a Gradient highway. Commun. Theor. Phys. 2014, 62, 393–404. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, Z.; Cao, J. An extended traffic flow model on a gradient highway with the consideration of the relative velocity. Nonlinear Dyn. 2014, 78, 1765–1779. [Google Scholar] [CrossRef]
- Zhang, G. The self-stabilization effect of lattice’s historical flow in a new lattice hydrodynamic model. Nonlinear Dyn. 2018, 91, 809–817. [Google Scholar] [CrossRef]
- Peng, G.; Zhao, H.; Li, X. The impact of self-stabilization on traffic stability considering the current lattice’s historic flux for two-lane freeway. Phys. A Stat. Mech. Appl. 2019, 515, 31–37. [Google Scholar] [CrossRef]
- Wang, T.; Gao, Z.; Zhao, X. Flow difference effect in the two-lane lattice hydrodynamic model. Chin. Phys. B 2012, 7, 211–219. [Google Scholar] [CrossRef]
- Gupta, A.; Redhu, P. Analysis of a modified two-lane lattice model by considering the density difference effect. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1600–1610. [Google Scholar] [CrossRef]
- Nagatani, T. Jamming transition in a two-dimensional traffic flow model. Phys. Rev. E 1999, 59, 4857–4864. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redhu, P.; Gupta, A. The role of passing in a two-dimensional network. Nonlinear Dyn. 2016, 86, 389–399. [Google Scholar] [CrossRef]
- Liu, Y.; Wong, C. A two-dimensional lattice hydrodynamic model considering shared lane marking. Phys. Lett. A 2020, 384, 126668. [Google Scholar] [CrossRef]
- Li, L.; Cheng, R.; Ge, H. New feedback control for a novel two-dimensional lattice hydrodynamic model considering driver’s memory effect. Phys. A Stat. Mech. Appl. 2021, 561, 125295. [Google Scholar] [CrossRef]
- Wang, T.; Zang, R.; Xu, K.; Zhang, J. Analysis of predictive effect on lattice hydrodynamic traffic flow model. Phys. A Stat. Mech. Appl. 2019, 526, 120711. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, K.; Li, S.; Wang, T. A new two-lane lattice hydrodynamic model with the introduction of driver’s predictive effect. Phys. A Stat. Mech. Appl. 2020, 551, 124249. [Google Scholar] [CrossRef]
- Kaur, D.; Sharma, S. The impact of the predictive effect on traffic dynamics in a lattice model with passing. Eur. Phys. J. B Condens. Matter Complex Syst. 2020, 93, 35. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Cheng, R.; Xu, T. Analysis of a Novel Two-Dimensional Lattice Hydrodynamic Model Considering Predictive Effect. Mathematics 2021, 9, 2464. https://doi.org/10.3390/math9192464
Liu H, Cheng R, Xu T. Analysis of a Novel Two-Dimensional Lattice Hydrodynamic Model Considering Predictive Effect. Mathematics. 2021; 9(19):2464. https://doi.org/10.3390/math9192464
Chicago/Turabian StyleLiu, Huimin, Rongjun Cheng, and Tingliu Xu. 2021. "Analysis of a Novel Two-Dimensional Lattice Hydrodynamic Model Considering Predictive Effect" Mathematics 9, no. 19: 2464. https://doi.org/10.3390/math9192464
APA StyleLiu, H., Cheng, R., & Xu, T. (2021). Analysis of a Novel Two-Dimensional Lattice Hydrodynamic Model Considering Predictive Effect. Mathematics, 9(19), 2464. https://doi.org/10.3390/math9192464