Abstract
In this paper, we introduce reflection-like maps in n-dimensional Euclidean spaces, which are affinely conjugated to We shall prove that reflection-like maps are line-to-line, cross ratios preserving on lines and quadrics preserving. The goal of this article was to consider the rigidity of line-to-line maps on the local domain of by using reflection-like maps. We mainly prove that a line-to-line map on any convex domain satisfying and fixing any points in a super-plane is a reflection or a reflection-like map. By considering the hyperbolic isometry in the Klein Model, we also prove that any line-to-line bijection is either an orthogonal transformation, or a composition of an orthogonal transformation and a reflection-like map, from which we can find that reflection-like maps are important elements and instruments to consider the rigidity of line-to-line maps.
MSC:
51F15; 30C35
1. Introduction
The research of rigidity of line-to-line maps has a long history (see Reference [1,2,3,4,5], etc.) from different perspectives. We say that a map is line-to-line, if is contained in some line for any line l in . Similarly, we say that a circle in Möbious space (or a geodesic in hyperbolic space ) is a line. For example, in Reference [4], J. Jeffers proves that a circle-to-circle bijection is a Möbious transformation, a geodesic-to-geodesic bijection is a hyperbolic isometry and a line-to-line bijection is an affine transformation. Various geometries are considered in mathematical researches of different transformations, such as complex curves, were studied using Laguerre planes and Grünwald planes in Reference [6].
It is well known that any Möbious transformation is a composition of finite inversions in dimensional spherical space (see Reference [7] for details). We can say that inversions are basic elements of Möbious transformations. Let
be dimensional hyperbolic space with hyperbolic metric . A reflection on is an isometry which fixes an hyperplane in and any hyperbolic isometry is a composition of finite reflections in . We can say that reflections are basic elements of hyperbolic isometries. Similarly,
can be seen as an dimensional hyperbolic subspace of . Let
be the Klein Model of hyperbolic space defined by the natural projection
Obviously, a map is a hyperbolic isometry, if and only if the transformation is a hyperbolic isometry in Klein Model in the following commutative diagram
A geodesic in Klein Model is a segment which is the projection of a geodesic in under , since any geodesic in is an arc perpendicular to .
For any subset , we call L a line in , if there exists a line l in , such that . We say that two lines in are parallel, if are parallel. We say that three lines in are concurrent, if have a common point in . We say that a map is line-to-line, if the image points of any collinear points are collinear and is line-onto-line, if is a line in for any line L in .
One can find that f is a line-to-line bijection in because the isometry F is a geodesic-to-geodesic bijection in in diagram (4). Especially, if the isometry is a reflection, then the line-to-line map satisfies and its fixed-points set is an dimensional superplane in . Obviously, f may not be an affine transformation. This is the origin of reflection-like maps considered in this paper. We shall show that reflection-like maps are basic elements and instruments to consider the rigidity of line-to-line maps.
In Reference [8], B. Li et al., introduce reflection maps in , which are affinely conjugated to the map
for any point in and give the following result.
Theorem 1
([8]). Suppose that is a convex domain and a map is line-to-line and satisfies . If f is not the restriction to of an affine transformation of , then f is a restriction of reflection map to .
In Reference [9], B. Li et al., use reflection maps on the rigidity of line-to-line maps in the upper plane and prove that
Theorem 2
([9]). Suppose that is a line-to-line surjection. Then, f is either an affine transformation, or a composition of an affine transformation and a g-reflection map.
In Reference [10], B. Li et al., prove that any refection map preserves the cross ratios
of any four collinear points and the following result.
Theorem 3
([10], Theorem 3.6). Suppose that is a domain and a line-to-line map is injective and non-degenerate. Then, f is either an affine transformation, or a composition of a g-reflection map and an affine transformation.
Here, a line-to-line map is degenerate (see Reference [11]), if the image space is contained in some line (otherwise, it is non-degenerate).
The goal of this article is to consider the rigidity of line-to-line maps on local domains in . We shall introduce the case in dimensional space of reflection maps, named reflection-like maps in this paper, and prove the following main results.
Theorem 4.
Suppose that Ω is any convex domain in and is a super-plane such that . A line-to-line map satisfies and for any . Then, η is a reflection or a reflection-like map.
Theorem 5.
Suppose that is a Klein Model of dimensional hyperbolic space and a map is a hyperbolic isometry. Then, f is either an orthogonal transformation, or a composition of an orthogonal transformation and a reflection-like map.
In the next sections, we shall prove that reflection-like maps are line-to-line and linearly conjugated to each other. Moreover, the image of three parallel lines under reflection-like maps are parallel or concurrent. The absolute cross ratios may not be preserved by reflection-like maps. But, we shall prove that refection-like maps preserve the absolute cross ratios of any four distinct collinear points, something like projective maps preserve the cross ratios of four points in a projective line in projective geometries. We shall also prove that refection-like maps transfer spheres to quadrics, from which we can obtain that they map quadrics to quadrics. Especially, if the image of a sphere is a sphere, then it is invariant.
2. Reflection-Like Maps in High Dimension Space
In this section, we shall give the definition of reflection-like maps firstly and prove invariant properties under affine conjugation. We mainly prove Theorem 4, the rigidity of reflection-like maps in local domain of dimensional space.
Denote points in by , and the line passing through by , the Euclidean distance between by . Denote the vector from X to Y by .
Let be two dimensional planes (superplanes) in and be a point
Obviously, and have equal Euclidean distances to . The map
satisfies . Moreover, is the fixed-point set of and the two components of divided by are invariant under .
Definition 1.
We say that a map η is a reflection-like map in , if it is affinely conjugated to θ. That is, one can find an affine transformation , such that .
Obviously, θ defined in (7) is a refection-like map in .
Moreover, we say that defined in (6) is Axis, is Boundary, and is Base point of the refection-like map θ.
Generally, given any affine transformation g, the reflection-like map has Boundary , Axis , and Base point . Obviously, , is the fixed-point set of , is parallel to , and and have equal Euclidean distances to . Moreover, the two components of divided by are invariant under .
Definition 2.
We call L a line in , if there exists a line l in , such that . If , then we say that L has boundary point .
Proposition 1.
The reflection-like map is a line-onto-line bijection.
Proof.
Let us prove that f is line-to-line in firstly. That is, for any three collinear points , , , their image points , , are collinear. There exists some , such that . That is, , for any . We have , , and
Let , and then . Meanwhile, , for any and
Thus, , which follows that are collinear. Hence, is line-to-line. Moreover, one can find that is bijective and is a line in for any line L in , since . That is, is a line-onto-line bijection and the proof is completed. □
Proposition 2.
For any line L in , the reflection-like map satisfies the following.
- (i)
- If , then , if and only if Base point ;
- (ii)
- If , then is parallel to L, if and only if L is parallel to Axis .
Proof.
We only need to prove that for any point and , since is line-to-line and satisfies .
Let , and , then one can find that which means .
For two distinct points , in L, denote the image points under by , . Obviously, L is parallel to Axis , if and only if . Then, is parallel to L by
On the other side, suppose that is parallel to L and . We can obtain that , for any by . Let , then , which means that , and by the result of . This is a contradiction, and the proof is completed. □
Corollary 1.
The image of a parallelogram under a reflection-like map is a parallelogram, if and only if the parallelogram is parallel to Axis of the reflection-like map. Moreover, the image of a square is a square, if the square is parallel to Axis.
Proposition 3.
For any two lines in , not parallel to , the reflection-like map satisfies the followings.
- (i)
- and share a common boundary point if is parallel to ;
- (ii)
- is parallel to if and share a common boundary point.
Proof.
We only need to prove that is a line passing through . From Proposition 2, we have . Denote the boundary point of by , then the vector .
- (i)
- Suppose that is any line parallel to . For any point in , one can obtain andIt follows that is the limit point of as t tends to ∞. That is, and share common boundary point if is parallel to .
- (ii)
- Suppose that is any line sharing common boundary point with . For any point , we can find that the vector
So, we have
and
As t tends to ∞, we obtain its boundary point .
Denote , then the vector
which follows that is parallel to for . □
Moreover, we can have the following.
Lemma 1.
Suppose that a reflection-like map η has the same Base point and Axis as θ. Then, .
Proof.
We need only prove that the reflection-like map is uniquely determined by Base point and Axis . One can know that Boundary is parallel to and lies between and with equal distances. For any point , let be the line in passing through X and , then by Proposition 2. Choose any point and let be the line in passing through X and Y, then it is easy to find . Let be the line passing through and parallel to , then . So share common boundary point, denoted by by Proposition 3. It follows that is the line passing through Y and having boundary point . Then, is determined uniquely. That is, the reflection-like map is determined by and . Therefore, we have . □
A transformation is linear, if it is a composition of translations, scaling and orthogonal transformations on . We say that a reflection-like map is linearly conjugated to , if one can find a linear map g, such that .
For any super-plane and a point , one can find a linear transformation g such that and . Then, is a reflection-like map with Base point P and Axis . So, we can obtain the following by Lemma 1.
Theorem 6.
Any reflection-like map is linearly conjugated to θ.
By conjugating affine transformation ,
is the general form of the reflection map defined in (5) on dimensional space.
Proof of Theorem 4.
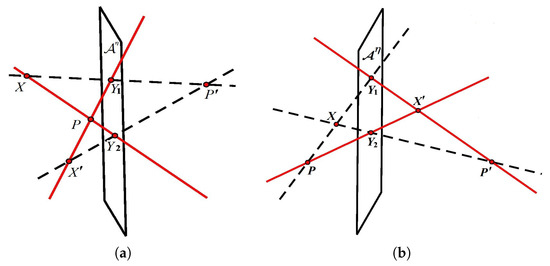
Let and be the two components of divided by . We claim that there exist and such that . Otherwise, suppose that we have , such that (as in the Figure 1a). For any , denote , and , then and .
Figure 1.
(a) Existence of in different sides. (b) Uniqueness determined by .
We shall prove that the line-to-line map is uniquely determined by and . Let denote the smallest convex domain containing and . For any point (as in the Figure 1b), let , , we can find that is unique. Moreover, the line-to-line map on will be uniquely determined by the mapping on its sub-domain .
Next, we shall prove the existence of . By conjugating some suitable affine transformation, we can suppose that , and . If , then is a reflection about
Otherwise, let and , then
is the reflection-like map with Axis and Base point such that . □
Corollary 2.
Suppose that θ is the reflection-like map defined in (7). Given any positive integer , let Π be any dimensional plane in passing through , then . Moreover, if , then is a reflection-like map with Axis and Base point .
Remark 1.
We give an example () to show that Theorem 1Adoes not hold in the case of reflection-like maps in (). That is, a line-to-line map on a convex domain satisfying may not be an affine transformation or a reflection-like map.
Example 1.
Let and be defined as
Obviously, and f is line-to-line, since f is a composition of an orthogonal transformation and a reflection-like map, while f cannot be a reflection-like map since its fixed-point set is , where and .
3. The Absolute Cross ratios in High Dimension Space
For any four distinct points , , , in , the absolute cross ratio is defined as
It is very important in high dimensional space. Especially, if , we can define it by the limit as Z tends to ∞
It is well known that, for any subdomain , a map is a Möbious transformation, if and only if f preserves the absolute cross ratios. The cross ratio is defined on four collinear points in projective geometry, and a projective transformation preserves cross ratios (see Reference [2,12] for details). While a reflection-like map considers one more dimension than a projectivity, it does not preserve absolute cross ratios.
For example (as in Figure 2), let , , and , then , , and . We have that maps the square to the quadrilateral since is line-to-line. It is easy to calculate that and .
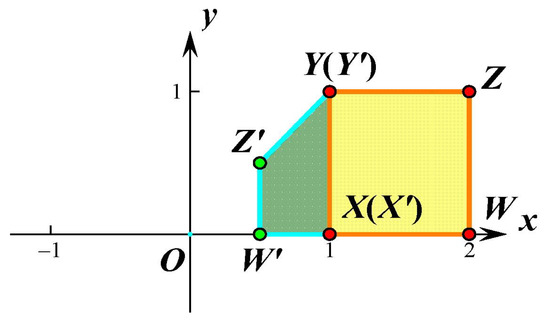
Figure 2.
Reflection-like maps may not preserve absolute cross ratios.
In this section, we shall prove that reflection-like maps preserve the absolute cross ratios of any four collinear points. In fact, for any collinear points , if for some , then we can have
Theorem 7.
Suppose that η is a reflection-like map with boundary . Then, for any four distinct collinear points in , the absolute cross ratio is invariant under η. That is,
Proof.
By conjugating some suitable linear transformation, we can suppose that the reflection-like map is defined in (7). Then, we have , , and are collinear. If , we have and
If , then there exists some i, such that . Thus, and
We complete the proof. □
4. Reflection-Like Maps and Quadrics
In this section, we shall prove that maps spheres to quadrics, from which we can obtain that reflection-like maps transfer quadrics to quadrics. Especially, if the image of a sphere is a sphere, then it is invariant.
Definition 3.
Given any reflection-like map, we say that the line passing its Base point and perpendicular to its Axis is its Equator.
For example, the Equator of is
One can find that, given any affine transformation, the Equator of may not be , while, if g is linear, the Equator of is .
Theorem 8.
The reflection-like map θ maps any sphere to a quadric.
If both and are dimensional spheres, then .
Moreover, if , then the center of lies in the equator of θ.
For any , such that , let be the dimensional sphere with diameter , then .
Proof.
Suppose that is a sphere with radius r and center . Then, any point satisfies
Denote the image point , then since . It follows , that is
Obviously, it is a quadric
Then, is a sphere, if and only if and , since is the coefficient of the term and is the coefficient of the term . It follows that, if is also a sphere, then
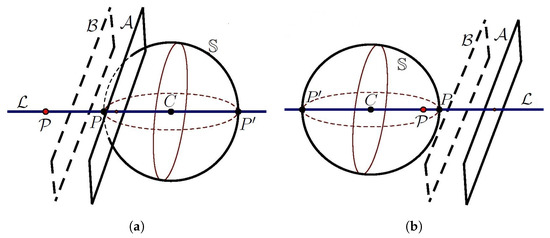
Thus, and the center (as in Figure 3).
Figure 3.
(a) Invariant sphere crossing Axis. (b) Invariant sphere surrounding Base point.
For any satisfying , let be the dimensional sphere with diameter (as in Figure 3). Denote , , and , then has radius r and center . One can find that since . □
Obviously, the invariant sphere lies in one component of and the interior of is invariant under by the continuity of reflection-like maps, which shows that is a line-to-line bijection. Moveover, if is a Klein Model of hyperbolic space, then is an isometry.
5. Reflection-Like Maps and Hyperbolic Isometries in Klein Model
In this section, we shall prove Theorem 5, the rigidity of line-to-line maps in a local domain of by hyperbolic isometry on Klein Model defined by projection as in Equations (1)–(3).
Lemma 2.
Suppose that is a reflection. Then, is a refection-like map or a reflection.
Proof.
Suppose that is a reflection relative to hyperbolic plane . Then and for any . It follows that is an dimensional plane in and is a line-onto-line bijection, satisfying and for any . Then, f is the restriction of a refection-like map or a reflection by Theorem 4. Specifically, f is a reflection if the origin point ; otherwise, f is a reflection-like map. □
For any two distinct points , one can always get a unique reflection , satisfying that . We can obtain the following Corollary.
Corollary 3.
For any point , there is a reflection-like map η satisfying that and . Moveover, denote Axis of η by , then .
Proof of Theorem 5.
If , then is the restriction to of an orthogonal transformation on .
If , then there exists a reflection-like map such that and by Corollary 3, which follows is a hyperbolic isometry satisfying . Thus, is the restriction to of an orthogonal transformation on . It implies that .
Above all, any hyperbolic isometry in Klein Model is either an orthogonal transformation, or a composition of an orthogonal transformation and a reflection-like map. □
From Theorem 5, one can deduce that any line-to-line bijection on can be extended line-to-line to (or except a superplane).
Author Contributions
Conceptualization, B.L.; Formal analysis, Z.H. and B.L.; Investigation, Z.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Artin, E. Geometric Algebra; Interscience Publishers, Inc.: New York, NY, USA; London, UK, 1957. [Google Scholar]
- Beardon, A.F.; Minda, D. Sphere-preserving maps in inversive geometry. Proc. Am. Math. Soc. 2001, 130, 987–998. [Google Scholar] [CrossRef]
- Chubarev, A.; Pinelis, I. Fundamental theorem of geometry without the 1-to-1 assumption. Proc. Am. Math. Soc. 1999, 127, 2735–2744. [Google Scholar] [CrossRef]
- Jeffers, J. Lost theorems of geometry. Am. Math. Monthly 2000, 107, 800–812. [Google Scholar] [CrossRef]
- Özgür, N.; Bulut, S. A note on the characteristic properties of Möbius transformations. Rad. Mat. 2004, 12, 129–133. [Google Scholar]
- Belova, O.; Mikeš, J.; Strambach, K. Complex Curves as Lines of Geometries. Results Math. 2017, 71, 145–165. [Google Scholar] [CrossRef]
- Beardon, A.F. The Geometry of Discrete Groups; Graduate Texts in Mathematics; Springer: New York, NY, USA, 1983; Volume 91. [Google Scholar]
- Li, B.; Wang, X.; Wang, Y. The pseudo-affine transformations in . Sci. China Math. 2010, 53, 755–762. [Google Scholar] [CrossRef]
- Li, B.; Wang, Y. A New Characterization of Line-to-line Maps in the Upper Plane. Filomat 2013, 27, 127–133. [Google Scholar] [CrossRef][Green Version]
- Li, B.; Wang, Y. Fundamental theorem of geometry without surjective assumption. Trans. Am. Math. Soc. 2016, 368, 6819–6834. [Google Scholar] [CrossRef]
- Li, B.; Wang, Y. Transformations and non-degenerate maps. Sci. China Math. 2005, 48, 195–205. [Google Scholar] [CrossRef]
- Onishchik, A.L.; Sulanke, R. Projective and Cayley-Klein Geometries; Springer Monographs in Mathematics; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).