On the Stability of la Cierva’s Autogiro



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
3. Towards a Particular Solution of la Cierva’s Equation
4. Sufficient Conditions on the Existence of Convergent Solutions
5. Puig-Adam’s Qualitative Approach
6. La Cierva’s Reduced Equation
7. Final Remarks
- We recall that the conditions provided in Section 4 to guarantee the existence of convergent solutions for la Cierva’s equation are sufficient but not necessary. In fact, let us consider the reduced la Cierva’s equation (c.f. Equation (56)), and definewhere the coefficients , and c are given as in Equation (57). Then for and , i.e., the choice of parameters used in both Section 5 and Section 6, it holds that the function is not positive in the whole interval (c.f., e.g., Figure 7). As such, the Liapounov’s condition (c.f. Theorem 3) cannot guarantee the existence of convergent solutions in regard to the reduced la Cierva’s equation for that choice of parameters. However, as proved in Section 5, la Cierva’s equation behaves stably for such parameters.
- Letbe a second order differential equation with , as it is the case of the la Cierva’s reduced equation (c.f. Equation (56)). Then its associated characteristic equation can be expressed in the following terms (c.f. Equation (27)):where the roots of Equation (65) are of the formHence, it is clear that , which leads toLet , where and v being as in Equation (53). Then the aperiodic part of is given by the next expression:Since , then it is clear thatAs such, implies . Observe that the stability condition consists of , which is satisfied whether . On the other hand, the condition is fulfilled provided that the characteristic exponent . In that case, the aperiodic part of is of the form , which goes to 0 as .
- In Section 4, it was provided a method, first proposed by Liapounov in [10], which allows calculating the coefficient A that appears in characteristic equations of the form Equation (65) that are associated to the next kind of differential equations (c.f. Equation (64)):In fact, it holds thatwhere , and and being as in Equation (28). On the other hand, in [11], Goursat applied that method for , thus leading to the expressions contained in Equation (28). However, even under the assumption that the series in Equation (66) is convergent, it holds that such a convergence would be quite slow, especially as the period increases. As a consequence, that particular expression becomes quite limited to deal with practical applications regarding the calculation of the coefficient A.
- The reader may think, at least at a first glance, that the form of the reduced la Cierva’s equation is similar to the one of the generalized Hill’s type equation, whose origins go back to the study of the movement of the Moon under the influence of the gravitational field of the system Earth-Sun. That equation admits the following expression:
- The stability of la Cierva’s autogiro has been proved for the choice of parameters and (c.f. Section 5 and Section 6). Going beyond, observe that the roots (i.e., the characteristic numbers) of the characteristic equation (c.f. Equation (42)) are continuous functions of their coefficients, which, in turn, are continuous functions of both parameters, and m. Hence, the stability of la Cierva’s equation will be preserved in a neighborhood of such parameters due to ([10] (Theorem, pp. 400)). Moreover, that neighborhood is expected to be wide enough since it is evident that la Cierva’s equation behaves stably for those parameters. It is also worth pointing out that if the movement of la Cierva’s autogiro is stable for a given speed, then it will be also stable for lower speeds. In other words, the stability will be preserved by decreasing the value of . This is a reason for which was selected to explore the stability of la Cierva’s equation in the previous sections. In fact, observe that for , the oscillations are dampened quickly.
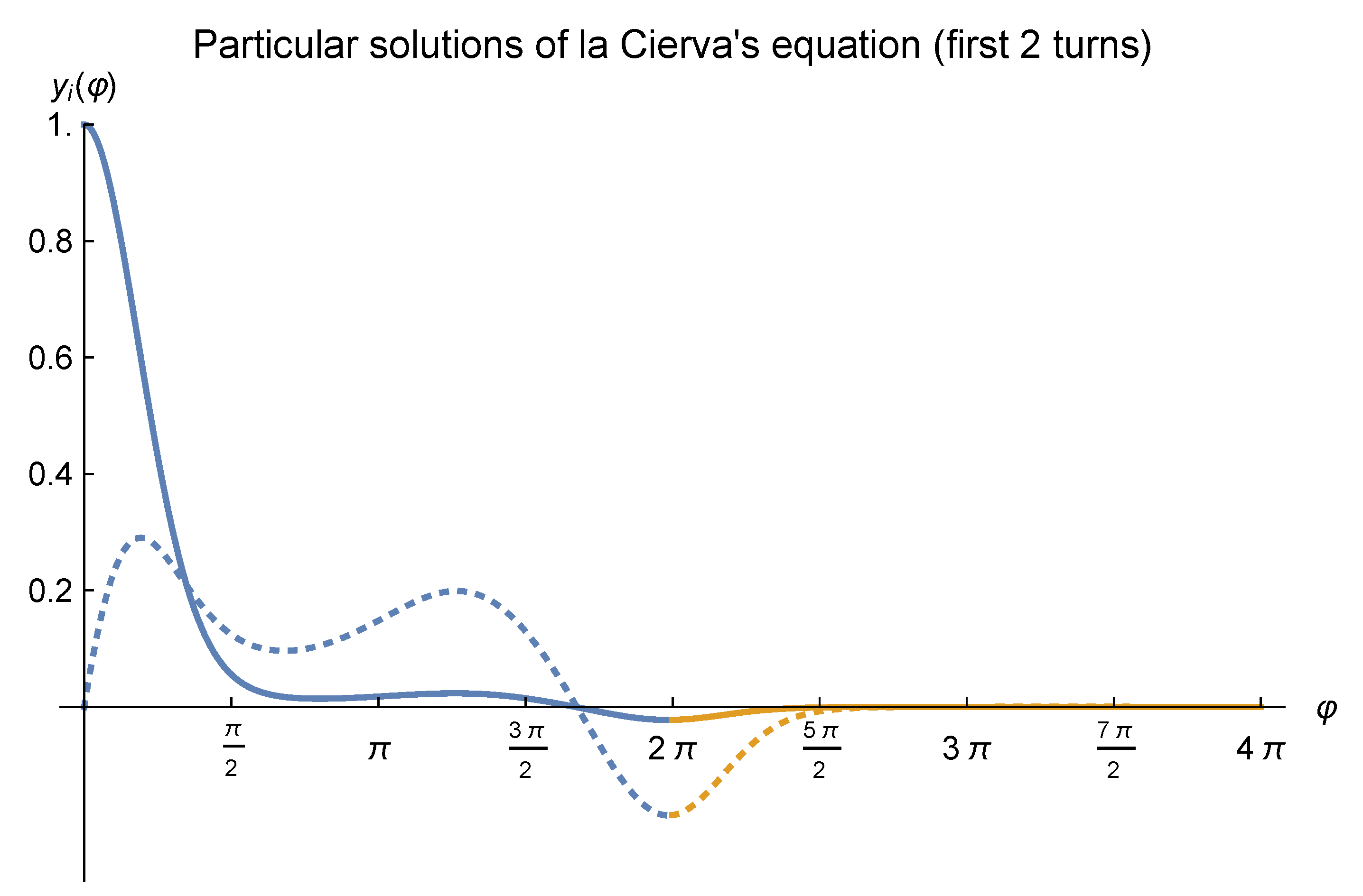
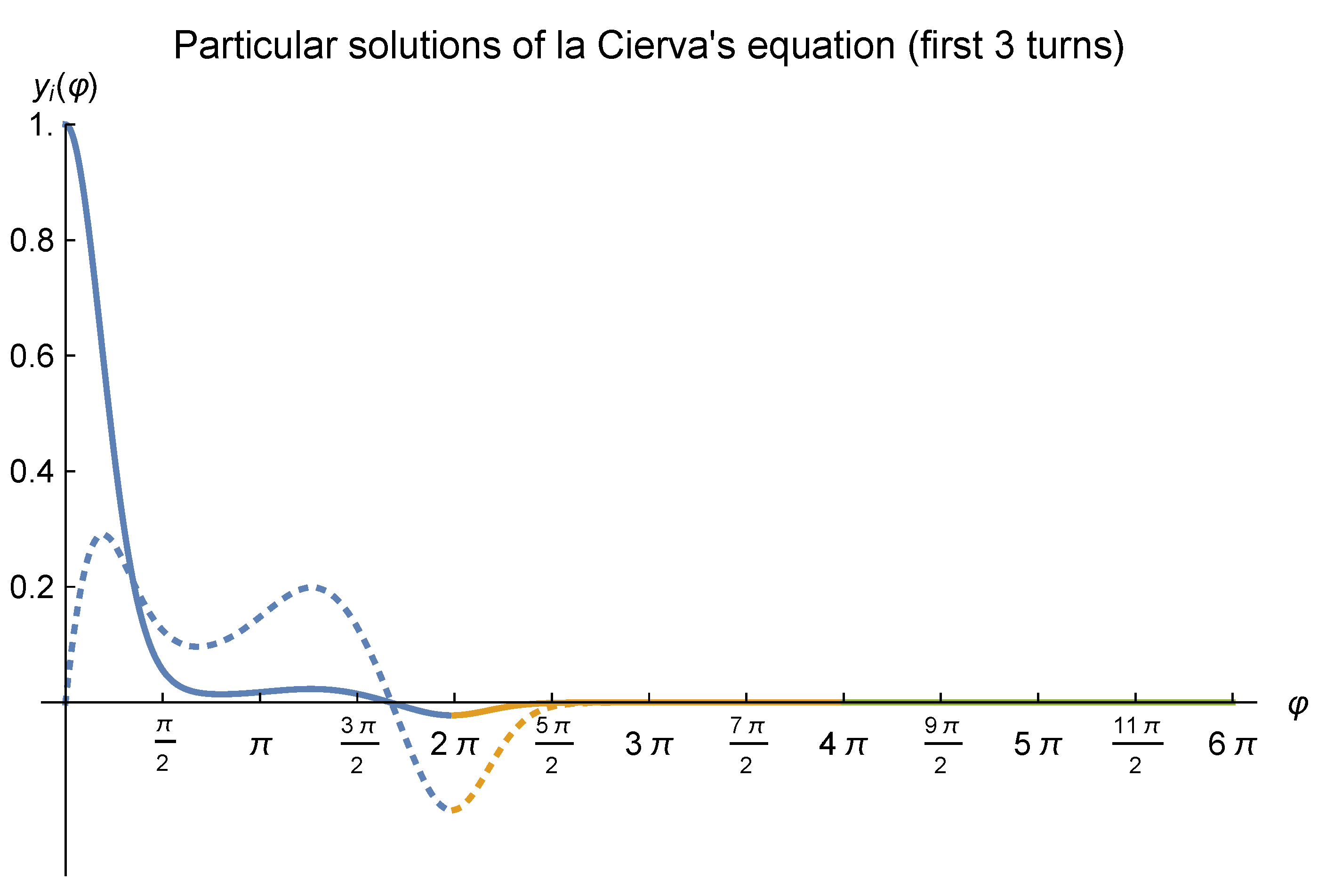
- In [7], Puig-Adam posed to analyze the area of the plane where la Cierva’s equation becomes stable. To deal with, we considered the rectangle of the Euclidean plane, , by taking into account the intervals proposed by Mr. la Cierva for each parameter. A partition consisting of 50 points was considered for each subinterval, thus leading to a point mesh contained in R. As such, for each , a la Cierva’s type equation (c.f. Equation (49)) holds, which was numerically solved as in Section 5 by means of the midpoint approach. Next step was to apply the Puig-Adam criterion to determine whether that equation is stable. Recall that such a condition consists of calculating , where and denote the particular solutions of the corresponding la Cierva’s equation for a choice of parameters. If , then the la Cierva’s equation is stable for those parameters. All the above allowed us to construct a 3D-surface, , we shall refer to as la Cierva’s surface. Figure 8 depicts la Cierva’s surface, whereas Figure 9 displays the contours of la Cierva’s surface. Such figures reveal an overall stable behavior of almost all la Cierva’s surface. On the other hand, Figure 10 and Figure 11 depict a neighborhood of Puig-Adam’s choice of parameters where la Cierva’s surface behaves stably, as stated in remark (5).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Johnson, W. Helicopter Theory; Dover Publications, Inc.: Mineola, NY, USA, 1994. [Google Scholar]
- List of NASA Aircraft. 2020. Available online: https://en.wikipedia.org/wiki/List_of_NASA_aircraft (accessed on 16 October 2020).
- Machado, J.T.; Galhano, A.M. A fractional calculus perspective of distributed propeller design. Commun. Nonlinear Sci. Numer. Simul. 2018, 55, 174–182. [Google Scholar] [CrossRef]
- Bing, L.; Ning, Y.; YeHong, D. LAV Path Planning by Enhanced Fireworks Algorithm on Prior Knowledge. Appl. Math. Nonlinear Sci. 2016, 1, 65–78. [Google Scholar] [CrossRef]
- Zhang, Q. Fully discrete convergence analysis of non-linear hyperbolic equations based on finite element analysis. Appl. Math. Nonlinear Sci. 2019, 4, 433–444. [Google Scholar] [CrossRef]
- Herrera, E. Sin Alas ni Timones; Madrid Científico: Madrid, Spain, 1934; pp. 51–53. [Google Scholar]
- Puig-Adam, P. Sobre la estabilidad del movimiento de las palas del autogiro. Rev. Aeronaut. 1934, 30, 478–485. [Google Scholar]
- Orts y Aracil, J.M. Nota sobre la ecuación diferencial que plantea la estabilidad del autogiro ultrarrápido. Ibérica 1934, 1024, 295–296. [Google Scholar]
- Orts y Aracil, J.M. Nueva contribución al estudio del problema matemático del autogiro ultrarrápido. Ibérica 1934, 1029, 376–377. [Google Scholar]
- Liapounov, A.M. Problème général de la stabilité du mouvement. Ann. Fac. Sci. Toulouse 1903, 2, 203–474. [Google Scholar] [CrossRef]
- Goursat, E. Differential Equations. In A Course in Mathematical Analysis; Hedrick, E.R., Dunkel, O., Eds.; Ginn and Company: Boston, MA, USA, 1905; Volume II. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Martínez, M.; Guirao, J.L.G. On the Stability of la Cierva’s Autogiro. Mathematics 2020, 8, 2032. https://doi.org/10.3390/math8112032
Fernández-Martínez M, Guirao JLG. On the Stability of la Cierva’s Autogiro. Mathematics. 2020; 8(11):2032. https://doi.org/10.3390/math8112032
Chicago/Turabian StyleFernández-Martínez, M., and Juan L.G. Guirao. 2020. "On the Stability of la Cierva’s Autogiro" Mathematics 8, no. 11: 2032. https://doi.org/10.3390/math8112032
APA StyleFernández-Martínez, M., & Guirao, J. L. G. (2020). On the Stability of la Cierva’s Autogiro. Mathematics, 8(11), 2032. https://doi.org/10.3390/math8112032