Abstract
We apply the method of a kind of dilation invariance to prove the generalized Hyers-Ulam stability of the (inhomogeneous) wave equation with a source, , for a class of real-valued functions with continuous second partial derivatives in each of spatial and the time variables.
Keywords:
wave equation; dilation invariance; perturbation; hyperbolic partial differential equation; generalized Hyers-Ulam stability MSC:
35L05; 35R45; 35B20; 35A23; 39B82
1. Introduction
The stability problems for the functional equations and (ordinary or partial) differential equations originate from the question of Ulam [1]: Under what conditions does there exist an additive function near an approximately additive function? In 1941, Hyers [2] answered the question of Ulam in the affirmative for the Banach space cases. Indeed, Hyers’ theorem states that the following statement is true for all : if a function f satisfies the inequality for all x, then there exists an exact additive function F such that for all x. In that case, the Cauchy additive functional equation, , is said to have (satisfy) the Hyers-Ulam stability.
Assume that V is a normed space and I is an open interval of . The nth order linear differential equation
is said to have (satisfy) the Hyers-Ulam stability provided the following statement is true for all : If a function satisfies the differential inequality
for all , then there exists a solution to the differential Equation (1) and a continuous function K such that for any and .
When the above statement is true even if we replace and by and , where are functions not depending on u and explicitly, the corresponding differential Equation (1) is said to have (satisfy) the generalized Hyers-Ulam stability. (This type of stability is sometimes called the Hyers-Ulam-Rassias stability.)
These terminologies will also be applied for other differential equations and partial differential equations. For more detailed definitions, we refer the reader to [1,2,3,4,5,6,7,8,9].
To the best of our knowledge, Obłoza was the first author who investigated the Hyers-Ulam stability of differential equations (see [10,11]): Assume that are continuous functions with and is an arbitrary positive real number. Obłoza’s theorem states that there exists a constant such that for all whenever a differentiable function satisfies the inequality for all and a function satisfies for all and for some . Since then, a number of mathematicians have dealt with this subject (see [3,12,13,14,15]).
Prástaro and Rassias are the first authors who investigated the Hyers-Ulam stability of partial differential equations (see [16]). Thereafter, the first author [17], together with Lee, proved the Hyers-Ulam stability of the first-order linear partial differential equation of the form, , where and are constants with . As a further step, the first author proved the generalized Hyers-Ulam stability of the wave equation without source (see [18,19]).
One of the typical examples of hyperbolic partial differential equations is the wave equation with spatial variables and the time variable t
where is a constant, n is a fixed positive integer, is the Laplace operator and . The solution of the wave Equation (2) is a scalar function describing the propagation of a wave at a speed c in all spatial directions.
In this paper, applying the method of dilation invariance (see [18,20]), we investigate the generalized Hyers-Ulam stability of the (inhomogeneous) wave Equation (2) with a source. The main advantages of this present paper over the previous works [18,19,21] are that this paper deals with the inhomogeneous wave equation and its time variable runs through the whole half line while the previous one [18] deals with the homogeneous wave equation and its time variable is not allowed to run through the whole half line (roughly speaking, the relevant domain seems somewhat artificial) and the other previous ones [19,21] deal with the one-dimensional homogeneous case only. In addition, the present work gives a partial answer to the open problem raised in ([18], Remark 3) concerning the domains of relevant functions.
2. Regular Solutions
If is a solution to the inhomogeneous wave Equation (2) for and a is a positive constant, then the dilated function satisfies the equality, , for all and . When the source term satisfies the additional condition
i.e., when is a homogeneous function of degree , is also a solution to the inhomogeneous wave Equation (2) for . This property is called the invariance under dilation.
In this section, we will search for regular solutions to (2) for which have the special form , where v is a twice continuously differentiable function. Such a method will be called the method of dilation invariance. We will restrict the solutions of (2) within the special class of functions, each of whose functions depends on the value of only. Indeed, this special class is a proper subclass of the class of functions with (independent) two variables x and t. The reason for selecting the dilation invariance of the form rather than is due to a technical complexity.
Based on this argument, we define
We note that if and only if (see Figure 1).
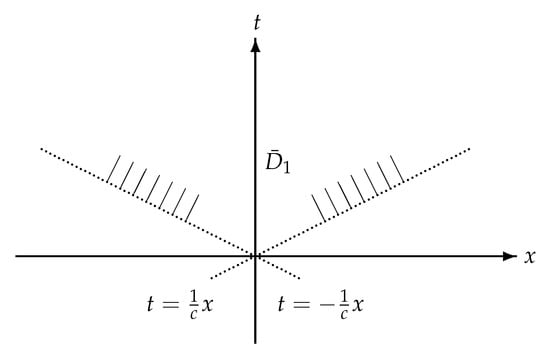
Figure 1.
|x| < ct.
Theorem 1.
Assume that is a function for which there exists a continuous function such that
and
for all . A function is a solution to the inhomogeneous wave Equation for if and only if there exists a real constant with
for all .
Proof.
Our assumption implies that there exist a twice continuously differentiable function and a real number such that
for any , where we set . Using this notation and chain rule as well as the partial derivatives
with , we calculate the following partial derivatives:
Since is assumed to be a solution to the wave Equation (2) with , by (4), we have
for any , and hence for all . Thus, it holds that
for any . Therefore, we get
for .
Taking account of the first limit condition in the definition of and (5), it follows from the last equation that
for all . Moreover, we get
for each .
Conversely, if a function has the form given in (6), then we can easily compute the following partial derivatives:
Hence, we obtain
for each , i.e., is a solution to the wave Equation (2) for .
Moreover, if we define a function by
then , v is twice continuously differentiable, and .
These facts imply that u belongs to . ☐
We now define
We note that if and only if (see Figure 2).
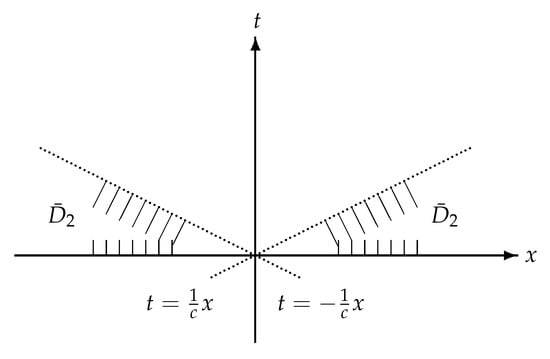
Figure 2.
|x| > ct.
Theorem 2.
Assume that is a function for which there exists a continuous function with the expression in and satisfying the condition
for all . A function is a solution to the inhomogeneous wave Equation for if and only if there exists a real constant with
for all .
Proof.
Our assumption implies that there exists a twice continuously differentiable function and a real number such that
for any , where we set . By using this notation and chain rule, we calculate the partial derivatives in (8).
Since is a solution to the wave Equation (2) for , it follows from (4) and the partial derivatives in (8) that
for any , and hence for all . Hence, it is true that
for all . Thus, we obtain
for .
On account of the first limit condition in the definition of and (9), it follows from the last equation that
for each . Further, we get
for each .
Conversely, if a function is expressed as (10), then we have the following partial derivatives:
Hence, we obtain
for every , i.e., is a solution to the wave Equation (2) for .
Moreover, if we define a function by
then , v is twice continuously differentiable, and .
These facts imply that . ☐
3. Main Results
In this section, n is a fixed positive integer and each point x in is expressed as , where denotes the ith coordinate of x. Moreover, denotes the Euclidean distance of x from the origin:
We will now search for approximate solutions to (2), which belong to a special class of scalar functions of the form , where v is a twice continuously differentiable function. That is, depends on x and t mainly through the term . Based on this argument, we define
Then it is obvious that if and only if .
If we define
for all and , then is a vector space over real numbers. That is, is a large class of scalar functions in a sense that it is a vector space.
The conditions (12) and (15) below might seem to be too strict at first look. However, we shall see in Corollaries 1 and 2 in the next section that those conditions are not as strict as they look.
Theorem 3.
Let functions and be given such that
for all and there exists a positive real number k with
Assume that is a function for which there exists a continuous function such that
and
for all . If a satisfies the inequality
for all , then there exists a solution of the wave Equation such that
for all .
Proof.
Our assumption implies that there exists a twice continuously differentiable function such that
for all , where we set . Then we have
for . Using these partial derivatives, we obtain
for .
Therefore, in view of (14) and (18), we have
and hence, by (16), we get
or
for all and (for each fixed and for any , we can select an such that and ). In addition, due to (13), it holds that
for all .
If we define in the previous inequality, then we obtain
for any . Moreover, we set
or equivalently
for all . Then it follows from (19) and (20) that
for any .
According to ([22], Section 1.8), as a solution to (20), has the following form
where is a constant, and we apply the following integral formula
to get
for , where is an arbitrary real constant and the last integral exists due to (12), (15) and (21).
Now, let us define a function by
or
Then, in view of ([22], Section 1.8) or by comparing (25) with (22), we can simply replace in (20) by to verify that satisfies
for all . Moreover, it follows from (21), (24) and (26) that
for each .
Noticing and regarding (25) or (26), we define functions and by
for all and , where is a twice continuously differentiable and satisfies by (15).
Let us define
Since the propagation speed of each solution to the wave Equation (2) is c, the ‘shape’ of the wave travels at the speed of c. Roughly speaking, seems to have a similar shape at each provided . Furthermore, v strongly depends on rather than x and t separately. Therefore, the limit condition in the definition of has a natural affinity in connection with that of .
Moreover, we see that if and only if . As we mentioned in the first part of this section, is also a large class of scalar functions in the sense that it is a vector space over real numbers. Even if the conditions (29) and (31) below seem somewhat strict at first look, they are actually not so strict, as we shall see in Corollary 3.
Theorem 4.
Let functions and be given such that
for all and there exists a positive real number k with
Assume that is a function for which there exists a continuous function satisfying the relation and
for all . If a satisfies the inequality for all , then there exists a solution of the wave Equation such that
for all .
Proof.
Due to our assumption , there exists a twice continuously differentiable function with the relation (17) for all , where we set . In the same way as in the first part of the proof of Theorem 3, we obtain the same derivatives in (18). Moreover, by (14) and (18), we have
and thus, by following the lines of the first part of the proof of Theorem 3 and by (16) and (30) and then defining , we get
for any . Moreover, in a similar way as in the proof of the previous theorem, we set
or we let the equality (20) hold true for all and then we see that the inequality (21) holds for any .
Since is a solution to (20), by considering ([22], Section 1.8), we may use the integral formula (23) to show that has the following form
for all , where is a constant and is an arbitrary real constant.
Now, let us define a function by the formula (25) or
for each . Then, by ([22], Section 1.8) or a direct calculation with (25), satisfies the equality (27) for all . Moreover, it follows from (21), (32) and (33) that
for each .
We now define functions and by and for all and , where is a twice continuously differentiable and satisfies . Then, by using the same argument as in the proof of Theorem 3, we can verify that is a solution to the inhomogeneous wave Equation (2).
4. Corollaries
In this section, we start with an example for Theorem 3 in the case of . Let us denote by and the and for , respectively, whose definitions were introduced in the first part of Section 3. Then we note that if and only if .
Corollary 1.
Given real constants , and , let be a function of the form
If a satisfies the inequality
for all , then there exists a solution of the wave Equation with such that
for any .
Proof.
First, we define functions and by
where and are arbitrarily chosen constants with . Then, considering the integral formula
for any , we get
for all , i.e., the control function satisfies the condition (12) for .
On the other hand, if we define a function by , then we use (36) to show
for all , i.e., the source function g satisfies the condition (15) for .
According to Theorem 3, there exists a solution to the wave Equation with such that the inequality (35) holds true for any . ☐
When n is an integer larger than 1, we will evaluate the integral
for any . We now substitute to get
for all .
Corollary 2.
Given a real constant α and an integer , let be a function of the form . Let be an arbitrary real constant. If a satisfies the inequality
for all , then there exists a solution of the wave Equation such that
for all .
Proof.
We first define the functions and by
where and are arbitrarily chosen constants with and we set . Then we see that .
We now consider the integral formula (37) to get
for all , i.e., the control function satisfies the condition (12).
On the other hand, if we define a continuous function by , then we see
and we use (37) to see
for all , i.e., the source function g satisfies the condition (15).
According to Theorem 3 and in view of (38), there exists a solution to the wave Equation such that
for any . ☐
In case of for , we prove the following corollary.
Corollary 3.
Given a real constant α and an integer , let be a function of the form
Let be an arbitrary real constant. If a satisfies the inequality
for all , then there exists a solution of the wave Equation such that
for all .
Proof.
Let us define the functions and by
where and are arbitrarily chosen constants with and we set . Then we get
for all , i.e., the control function satisfies the condition (29).
Furthermore, if we define a continuous function by
then we see
and we obtain
for all , i.e., the source function g satisfies the condition (31).
Due to Theorem 4 and in view of (39), there exists a solution to the wave Equation such that
for any . ☐
Author Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript. Writing original draft, G.C. and S.-M.J.; Writing review & editing, G.C. and S.-M.J.
Funding
This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (No. 2016R1D1A1B03931061). This work was supported by 2018 Hongik University Research Fund.
Conflicts of Interest
The authors declare that there is no conflict of interest regarding the publication of this article.
References
- Ulam, S.M. Problems in Modern Mathematics; Wiley: New York, NY, USA, 1964. [Google Scholar]
- Hyers, D.H. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 222–224. [Google Scholar] [CrossRef] [PubMed]
- Alsina, C.; Ger, R. On some inequalities and stability results related to the exponential function. J. Inequal. Appl. 1998, 2, 373–380. [Google Scholar] [CrossRef]
- Brzdȩk, J.; Popa, D.; Raşa, I. Hyers-Ulam stability with respect to gauges. J. Math. Anal. Appl. 2017, 453, 620–628. [Google Scholar] [CrossRef]
- Brzdȩk, J.; Popa, D.; Raşa, I.; Xu, B. Ulam Stability of Operators; Mathematical Analysis and Its Applications; Academic Press; Elsevier: Amsterdam, The Netherlands, 2018; Volume 1. [Google Scholar]
- Hyers, D.H.; Isac, G.; Rassias, T.M. Stability of Functional Equations in Several Variables; Birkhäuser: Boston, MA, USA, 1998. [Google Scholar]
- Jung, S.-M. Hyers-Ulam-Rassias Stability of Functional Equations in Nonlinear Analysis; Springer Optimization and Its Applications; Springer: New York, NY, USA, 2011; Volume 48. [Google Scholar]
- Moszner, Z. Stability has many names. Aequationes Math. 2016, 90, 983–999. [Google Scholar] [CrossRef]
- Rassias, T.M. On the stability of the linear mapping in Banach spaces. Proc. Am. Math. Soc. 1978, 72, 297–300. [Google Scholar] [CrossRef]
- Obłoza, M. Hyers stability of the linear differential equation. Rocznik Nauk.-Dydakt. Prace Mat. 1993, 13, 259–270. [Google Scholar]
- Obłoza, M. Connections between Hyers and Lyapunov stability of the ordinary differential equations. Rocznik Nauk.-Dydakt. Prace Mat. 1997, 14, 141–146. [Google Scholar]
- Gselmann, E. Stability properties in some classes of second order partial differential equations. Results Math. 2014, 65, 95–103. [Google Scholar] [CrossRef]
- Popa, D.; Raşa, I. On the Hyers-Ulam stability of the linear differential equation. J. Math. Anal. Appl. 2011, 381, 530–537. [Google Scholar] [CrossRef]
- Takahasi, S.-E.; Miura, T.; Miyajima, S. On the Hyers-Ulam stability of the Banach space-valued differential equation y′ = λy. Bull. Korean Math. Soc. 2002, 39, 309–315. [Google Scholar] [CrossRef]
- Wang, G.; Zhou, M.; Sun, L. Hyers-Ulam stability of linear differential equations of first order. Appl. Math. Lett. 2008, 21, 1024–1028. [Google Scholar] [CrossRef]
- Prástaro, A.; Rassias, T.M. Ulam stability in geometry of PDE’s. Nonlinear Funct. Anal. Appl. 2003, 8, 259–278. [Google Scholar]
- Jung, S.-M.; Lee, K.-S. Hyers-Ulam stability of first order linear partial differential equations with constant coefficients. Math. Inequal. Appl. 2007, 10, 261–266. [Google Scholar] [CrossRef]
- Jung, S.-M. On the stability of wave equation. Abstr. Appl. Anal. 2013, 2013, 910565. [Google Scholar] [CrossRef]
- Jung, S.-M. On the stability of one-dimensional wave equation. Sci. World J. 2013, 2013, 978754. [Google Scholar] [CrossRef] [PubMed]
- Hegyi, B.; Jung, S.-M. On the stability of Laplace’s equation. Appl. Math. Lett. 2013, 26, 549–552. [Google Scholar] [CrossRef]
- Jung, S.-M.; Min, S. Stability of the wave equation with a source. J. Funct. Spaces 2018, 2018, 8274159. [Google Scholar] [CrossRef]
- Kreyszig, E. Advanced Engineering Mathematics, 4th ed.; John Wiley & Sons: New York, NY, USA, 1979. [Google Scholar]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).