Abstract
A Roman dominating function for a (non-weighted) graph is a function such that every vertex with has at least one neighbor such that . The minimum weight of a Roman dominating function f on G is called the Roman domination number of G and is denoted by . A graph , together with a positive real-valued weight-function , is called a weighted graph and is denoted by . The minimum weight of a Roman dominating function f on G is called the weighted Roman domination number of G and is denoted by . The domination and Roman domination numbers of unweighted graphs have been extensively studied, particularly for their applications in bioinformatics and computational biology. However, graphs used to model biomolecular structures often require weights to be biologically meaningful. In this paper, we initiate the study of the weighted Roman domination number in weighted graphs. We first establish several bounds for this parameter and present various realizability results. Furthermore, we determine the exact values for several well-known graph families and demonstrate an equivalence between the weighted Roman domination number and the differential of a weighted graph.
MSC:
05C78; 05C69; 05C22
1. Introduction
A (simple, undirected) graph is a pair , where V is a finite set of vertices and E is a set of unordered pairs with and . A graph together with a positive real-valued weight-function is called a vertex-weighted graph or simply weighted graph and is denoted by .
Graph Theory has established itself as a versatile and essential tool across multiple disciplines due to its unparalleled capacity to model any network in a structured and mathematical manner. This process of abstraction allows researchers to deepen their understanding of a system’s behavior, evaluate its operational capacities, and develop robust predictive models. To achieve this, the practical challenge must first be formulated as a formal mathematical problem, centered on the analysis of specific graph parameters such as connectivity, centrality, or robustness.
In the majority of real-world scenarios, the components of a network and their interconnections are not uniform. They possess intrinsic properties that dictate the dynamics of the entire system. In Chemistry and Molecular Biology, the atoms within a molecule possess distinct masses and electronegativities [1,2] that influence molecular stability and reactivity. When modeling a protein as a graph, where nodes represent amino acids, the weight of an edge serves as a critical indicator of the physical distance or the interaction strength between them [3,4]. This spatial information is vital for understanding protein folding and enzymatic functions. In Communication Networks, unlike simple graphs where a connection is either “on” or “off”, real digital networks depend on bandwidth [5], latency [6], and throughput [7]. Weighting an edge allows engineers to model the cost of sending data through a specific route, which is the basis for modern internet routing protocols.
Despite the significant advances in Graph Theory and its widespread application in complex networks, much of the current theoretical body of work is based on the study of unweighted graphs. While these models are mathematically elegant, their scope is often limited when applied to the inherent heterogeneity of real-world networks. A model that treats all connections as equal can overlook critical bottlenecks or fail to identify the most efficient paths in a resource-constrained environment.
The transition from unweighted to weighted graph theory is not a simple task of direct translation. Some fundamental properties do not generalize easily. However, other properties show remarkable resilience and can be adapted through advanced mathematical frameworks.
One of the most studied and applicable topics in the context of unweighted graphs is domination in graphs (see [8]). In its simplest form, a dominating set is a subset of nodes such that every node in the network is either in the set or adjacent to at least one member of the set. In a weighted interconnection network, the challenge evolves into finding a Minimum Weight Dominating Set. This has profound implications, for instance, in Ecology by determining the critical habitat patches that must be protected to ensure the survival of a species across a fragmented landscape [9] and in Communication when we want to optimize the placement of sensors or servers to ensure total coverage of a network at the lowest possible infrastructure cost [10].
Roman domination is one of the most intriguing and widely studied variants within the field of domination in Graph Theory. Unlike classical domination, where a node simply covers its neighbors, Roman domination introduces the concept of strategic redundancy. This model does not merely seek coverage; it guarantees that the node providing protection retains its own integrity and functionality after deploying its resources to assist others. The concept is rooted in a military defense strategy proposed by the Emperor Constantine the Great to protect the Roman Empire in the 4th century. Constantine decreed that no legion could leave its current location to assist a neighboring region under attack unless there was a second legion present to defend the original site. In mathematical terms, this problem was formalized in 1990 by Stewart [11] and the notion of Roman domination in graphs was introduced by Cockayne et al. [12]. A Roman dominating function (RDF for short) on a non-weighted graph is defined as a function such that every vertex with is adjacent at least to one vertex for which . In other words, every RDF partitions the vertices into three sets based on the assigned label: is the subset of vertices with maximum resource capacity. is the subset of vertices with enough resources for their own defense, but which are incapable of assisting others. And is the subset of vertices without their own resources. To be considered protected or secured, they must be adjacent to at least one vertex in . The aim is to find a RDF which ensures the entire graph is protected with the minimum cost. The significance of Roman domination lies in its utility for systems where resource mobility and service continuity are critical requirements. These are the cases of server architectures and data centers, emergency logistics and public safety projects and especially of systems biology and epidemic control, where it is used to identify control nodes within metabolic or protein interaction networks. If a drug must intervene in a biological pathway, Roman domination helps select intervention points that ensure the stability of the cellular system even under conditions of external stress or genetic mutation. Several studies have focused on obtaining properties of this parameter and some of its variants (see for instance [13,14,15,16,17,18]).
In this research, we investigate the Roman domination number of a weighted graph. Our study begins by establishing a formal upper bound expressed in terms of the classical domination number. Furthermore, we derive and prove several general bounds that are demonstrated to be optimal. Finally, we determine the exact values of this parameter for various fundamental families of graphs, offering a precise reference for future applications in network topology and design.
2. Definitions and Terminology
Throughout this article, only undirected simple graphs without loops or multiple edges are considered. Unless otherwise stated, we follow References [8,19,20] for terminology and definitions.
A (non-weighted) graph G is a pair , where V is a set of vertices, and is a set of edges, which are connections between those vertices, usually represented as unordered pairs of vertices. The neighborhood of a vertex of G is . The closed neighborhood of u is .
A graph together with a positive real-valued weight-function is called a vertex-weighted graph or simply a weighted graph, and is denoted by . Given a weighted graph and a subset the weight of S is . The order of G is whereas the weight of G is . A weighted graph such that is called a normed weighted graph. For every vertex , the weighted degree of v is defined as . Furthermore, let and denote the minimum and maximum weighted degree of G, respectively. The subgraph of G induced by S, denoted by , is the graph with vertex set S whose edges consist of all edges in G that connect two vertices in S. Analogously, the subgraph of induced by S, also denoted by , is the weighted graph . In this case, the vertex and edge sets are defined identically to the unweighted case, and the weight function is restricted to . A subset of vertices is said to be independent if no two vertices in S are adjacent.
A weighted complete graph of order n, denoted by , is a weighted graph in which every pair of distinct vertices is adjacent. It should be noted that, unlike unweighted graphs, a weighted complete graph is not unique. In fact, each weight function w defines a distinct weighted complete graph.
Given a graph (resp. a weighted graph ), every vertex dominates itself and each of its neighbors. We say that a subset is a dominating set (resp. weighted dominating set) of G if every vertex of is neighbor of some vertex of D; that is, if . The minimum cardinality of a dominating set of G is called the domination number of G and it is denoted by . The minimum weight of a weighted dominating set of G is called the weighted domination number of G and it is denoted by .
In a graph (resp. weighted graph ), a Roman dominating function, for short RDF, (resp. weighted Roman dominating function, for short wRDF) is a mapping that satisfies the condition where each vertex u with must be adjacent to at least one vertex v such that . The total weight of an RDF (resp. wRDF) is (resp. ). Throughout the paper, we adopt the convention of viewing an unweighted graph as a vertex-weighted graph in which for all . Under this convention, the expression consistently represents the weight of a Roman dominating function in both the weighted and unweighted settings. The smallest weight among all RDFs (resp. wRDFs) on G (resp. ) is called the Roman domination number of G (resp. weighted Roman domination number of ) and is denoted by (resp. ).
3. General Bounds on Weighted Roman Domination Number
We first establish both upper and lower bounds for the weighted Roman domination number in terms of the weighted domination number.
Theorem 1.
For every weighted graph , it follows that .
Proof.
First, let us show that . Let f be a -function and consider the associated partition . Since every vertex of has at least one strong neighbor in , we can ensure that is a weighted dominating set on ;
Second, we prove that . Let D be a -set of and consider the function defined as if , and otherwise. It is evident that f constitutes a wRDF on . Consequently, we obtain: . □
Next, we examine the classes of weighted graphs where the equality holds. Before doing so, we state the following necessary remark.
Remark 1.
Let be a -function on . If f is chosen such that the cardinality of is minimized, then is an independent set in .
Proof.
Let be a -function that minimizes . To prove the property by contradiction, suppose there exists an edge connecting two vertices in . Without loss of generality, we may assume that . We then define a new function as follows: , , and for all . Since u is assigned a value of 2, it is self-dominated and also dominates v. Consequently, g is a weighted Roman dominating function with associated partition . The total weight of g satisfies . However this fact contradicts the minimality of in f. Therefore, no such edge can exist, implying that is an independent set. □
We now characterize the classes of weighted graphs for which the lower bound of established in Theorem 1 is attained.
Theorem 2.
Let be a weighted graph of order n. The equality holds if and only if G is the empty graph .
Proof.
If has no edges, then the only weighted dominating set is , and consequently . Furthermore, the unique -function f on is defined by for all , with a weight of . Now, assume that . According to Remark 1, it suffices to show that the only -function on is for all . Let f be a -function on G and consider its associated partition . We aim to prove that . Since every vertex u with must be adjacent to at least one vertex v with , it follows that is a weighted dominating set of . Then
and therefore
This implies that and, consequently, . Thus, , which completes the proof. □
The following theorem upper bounds in terms of the graph weight and the maximum weighted degree . A similar bound for the weighted domination number was given in [21].
Theorem 3.
Let be a non-trivial weighted graph. Then
Proof.
Since is non-trivial, let be a vertex such that . It follows that , and thus . Let be a -function with the associated partition . For any , we observe that . Summing over all , we obtain:
Then, it follows from (2) that
Hence, , which finishes the proof. □
For unweighted graphs, it was proven in [12] that , where n denotes the order and the maximum degree of the graph. The bound established in Theorem 3 serves as a weighted generalization of this result. Indeed, if a weighted graph of order n is normed, then . Consequently, Theorem 3 implies that .
The upper bound of Theorem 3 is tight, as we can see in the weighted graph depicted in Figure 1. Indeed, , and the function , defined by and for , is a -function. Furthermore, based on the vertex weights (indicated in parentheses), we have and . Consequently, the following equality holds: . There are also some families of weighted graphs for which the upper bound of Theorem 3 is reached, as we will see in the next section.
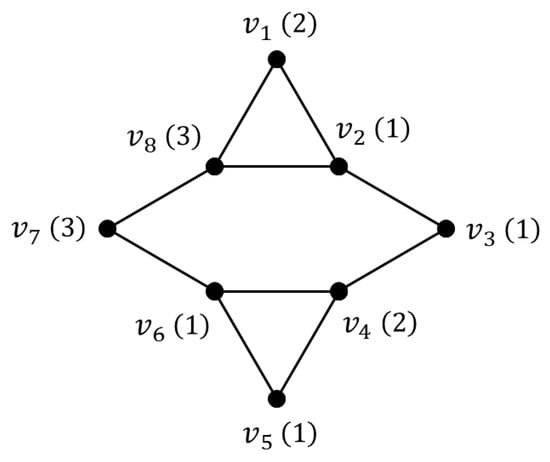
Figure 1.
An example for which the upper bound of Theorem 3 is reached.
The following proposition establishes several properties of the partition associated with a -function.
Proposition 1.
Let be a weighted graph and let f be a -function with associated partition . Then, the following assertions hold:
- (a)
- If are adjacent, then .
- (b)
- No edge of G joins a vertex in to a vertex in .
- (c)
- is a -set of the induced subgraph .
Proof.
(a) Without loss of generality, assume that . Consider the function defined by , , and for all . It is clear that g is a wRDF on . Its weight is given by
Since f is a -function, it must follow that to avoid a contradiction with the optimality of f.
(b) Suppose, on the contrary, that there exists an edge joining and . By setting and leaving all other values unchanged, we obtain a new function which is still a wRDF on . This is because the domination of u is maintained by its neighbor , rendering the initial label redundant. Consequently, is a wRDF with a strictly smaller weight than f, contradicting the optimality of f.
(c) Since each vertex has at least one neighbor in , it follows that is a weighted dominating set of the induced subgraph . Suppose is not a -set of . Then, there exists a weighted dominating set such that . In this case, we define a new function as follows: if , if , and otherwise. This function g is a wRDF on with an associated partition . However, its weight satisfies:
which contradicts the optimality of f as a -function. □
Next we will provide a condition that is both necessary and sufficient for a non-trivial weighted graph to have a equal to its weight. Before this, we need to prove that every two neighbors must have the same weight.
Lemma 1.
Let be a non-trivial weighted graph. Assume that and let f be a -function on with the associated partition . Then, the following assertions hold:
- (i)
- For every , .
- (ii)
- is an independent set.
- (iii)
- If and are adjacent, then the edge is a connected component of .
Proof.
Suppose, for the sake of contradiction, that there exists such that .
Case 1: Assume . Define a function such that , for all , and otherwise. It is clear that g is a wRDF on . However, its weight satisfies:
which contradicts the assumption that .
Case 2: Assume . In this case, we have:
This implies , contradicting the fact that f is a -function.
Consequently, must hold for every .
If are adjacent, we can reassign and for all . Since u dominates v, g remains a wRDF. By item , we know that . Thus, , a contradiction. Hence, must be an independent set.
Let and be adjacent vertices. By Proposition 1 and item , it follows that . From item , we have the identity:
which particularly implies:
Let be the function defined by , , for all , and otherwise. The function g has an associated partition , being , and . The only vertex in not in is u, which is dominated by . Thus, g is a wRDF on . Based on Equations (3) and (4), we obtain:
This chain of inequalities implies that , which, according to (3), is only possible if . Furthermore, as , the function g is also a -function with and . Applying the same reasoning to v leads to . Consequently, every edge connecting and is a connected component. □
Theorem 4.
Let be a non-trivial weighted graph. Then . Equality holds if and only if every connected component of G is either an isolated vertex or a single edge such that .
Proof.
Clearly, , as the function defined by for all is a wRDF with weight . Suppose that every connected component of G is either an isolated vertex or a single edge. Let the set of edges be and let Z be the set of isolated vertices, such that , where and . Given that for all i, it follows directly that .
Conversely, assume , and let f be a -function with associated partition . By the definition of weighted Roman domination, no vertex in can be adjacent to a vertex in ; otherwise, reassigning for the vertex would yield a wRDF of smaller weight, a contradiction. Furthermore, by Lemma 1, we deduce that each vertex has at most one neighbor, and that any two adjacent vertices must have the same weight. This completes the proof. □
As a consequence of Theorem 4, we establish a Nordhaus–Gaddum-type inequality for the sum of the weighted Roman domination numbers of a weighted graph and its complement.
Proposition 2.
Let be a weighted graph, with vertices, such that both and are non-trivial. Then,
Proof.
Let f be a -function on that minimizes the cardinality of . Since is a non-trivial graph, it contains at least one edge. This implies that , and consequently, . Applying the same reasoning to the complement, we obtain . Summing these two lower bounds yields the first inequality. Regarding the upper bound, Theorem 4 establishes that and . According to the same theorem, equality holds only if every connected component of G is either an isolated vertex or an isolated edge. Crucially, a graph and its complement cannot simultaneously possess this structure. Therefore, at least one of the inequalities must be strict: either or . It follows that:
□
Since , the upper bound in Proposition 2 can be equivalently expressed as .
4. The Weighted Roman Domination Number of Some Families of Graphs
In this section, we determine the weighted Roman domination number for complete graphs and complete bipartite graphs. Furthermore, we provide approximations for this parameter in weighted cycles.
The following result is a direct consequence of Theorem 3.
Corollary 1.
For a complete weighted graph of order ,
Proof.
Let be a vertex such that . We shall prove that . First, consider the function defined by and for all . It is clear that f is a wRDF, as is adjacent to all other vertices in . The weight of this function is , which implies that . To establish the lower bound, let be the weighted maximum degree. For a complete graph, . By applying Theorem 3, we obtain:
Combining both inequalities, we conclude that . □
In general, obtaining closed-form expressions for the exact value of the parameter is a challenging task, even when restricted to well-known families of weighted graphs. In the classical unweighted case, an optimal strategy for Roman domination in complete bipartite graphs is to assign labels from to the vertices in the partition of cardinality two. However, in the weighted case, this strategy may not be optimal, as the vertex weights can favor a different distribution of values (see Figure 2). Indeed, the examples in Figure 2 illustrate how the optimal weighted Roman dominating function (wRDF) adapts to different weight distributions. In graph (a), the optimal wRDF assigns , , and for . In graph (b), it is optimal to set for , while assigning and for . In graph (c), the minimum weight is achieved by setting and for .
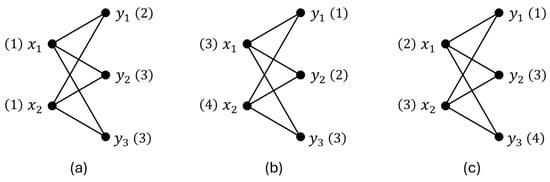
Figure 2.
Optimal wRDF assignments for different weight distributions on (vertices not listed have label 0): (a) , ; (b) and ; (c) .
The following proposition provides the exact value of the weighted Roman domination number for a complete bipartite weighted graph. This value is expressed in terms of the total weights of both vertex classes and the minimum vertex weight within each class.
Proposition 3.
Let be a complete bipartite weighted graph with vertex classes and , where . Assume the vertices are ordered so that for , and , for . Then:
- (i)
- If , then .
- (ii)
- If , then
Proof.
Let be a -function on that minimizes . By Remark 1, the set must be contained entirely within either X or Y. Proposition 1 establishes that vertices in and cannot be adjacent. Furthermore, note that if a vertex were assigned label 1, any vertex with label 2 would be forced into the same partition class to avoid adjacency; however, such a configuration would contradict Remark 1 or the minimality of .
Case 1. Assume that . Since f is chosen to minimize , it follows that
On the one hand, if , then must be dominated by Y. Therefore, there exists such that and for all . Thus,
Since it is verified that So,
Now, consider the -function defined by , for , and otherwise.
On the other hand, if , then all vertices in Y are already dominated, implying for all j. Reasoning analogously to the previous case, this leads to
Therefore, if , it follows that
Case 2. Assume that . We distinguish two subcases:
Subcase 2.1. Suppose that and, hence either or Without loss of generality, assume that This implies that , and therefore for all . So, for and there exists with Consequently,
This inequality holds because the function defined by , for , and for , is a wRDF.
Subcase 2.2. Assume . Then, there exist and satisfying . Thus,
The function defined by and otherwise is a wRDF, which confirms the previous inequality.
Therefore, for , it follows that:
and the proof is complete. □
The Roman domination number of an unweighted cycle of order n is well known and straightforward to determine; specifically, . However, when weights are assigned to the vertices, the problem becomes considerably more complex. In the following theorem, we provide an upper bound for the weighted Roman domination number in terms of the total weight of the cycle. Furthermore, for cases where , we will prove that this bound is attained if and only if the weights are uniformly distributed among all vertices.
Theorem 5.
Let be a weighted cycle of order , and let . Then:
Proof.
Let the weighted cycle be denoted by . We analyze the problem by considering three cases based on the remainder of n modulo 3.
Case 1: . For each , define the function as:
and otherwise. Each is a weighted Roman dominating function (wRDF) on . Summing the weights of all such functions, we obtain:
It follows that .
Case 2: . For each , define as:
and otherwise. Since each is a wRDF on , we have:
Therefore, .
Case 3: . For each , define as:
and otherwise. Clearly, is a set of wRDFs on , which implies:
Thus, . □
Theorem 6.
Let be integers such that for . Let be a weighted cycle of order n. Then,
if and only if the weights of all vertices are equal (i.e., w is a constant weight function).
Proof.
Let the weighted cycle be denoted by . If all vertex weights are equal, say for some constant , then can be identified with an unweighted cycle scaled by p. In this case, .
Now, let us show the converse. Assume that . Under this assumption, all inequalities in Theorem 5 become equalities—specifically, those in (6) if , and those in (7) if . Consequently, every function in the set is a -function. The set of n identities can be expressed as a linear system of the form , where:
and A is a circulant matrix whose rows correspond to the labels assigned by each . Specifically, the entries of each row are determined by the labels defined in the construction of the functions . This linear system has a unique solution by the Rouché-Frobenius Theorem, provided that (i.e., A is non-singular). We observe that the sum of the entries in each row of A is constant and equal to if , and if . Since the vector is also constant, it follows that for all is a solution to the system. Given that the matrix is non-singular, this is the unique solution, which implies that all vertex weights are equal, thus completing the proof. □
The reasoning used in the proof of Theorem 6 can be extended to the case to demonstrate that does not necessarily imply that all vertex weights are equal. This occurs because the circulant matrix associated with the linear system , derived from Equation (5) in Theorem 5, has a rank strictly less than n. Specifically, for , the rank of this matrix is 3 (for ). Consequently, when , there are infinitely many weighted graphs for which the bound in Theorem 5 is attained. Figure 3 illustrates this by showing two weighted hexagons () with the same total weight but different vertex weight distributions, both of which satisfy the equality in Theorem 5.
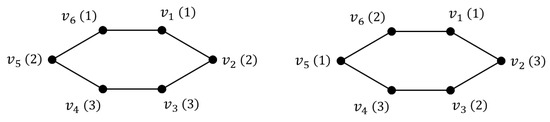
Figure 3.
Examples of weighted hexagons where the equality in Theorem 5 holds.
5. The Weighted Roman Domination Number and the Differential of a Weighted Graph
The concept of the differential of an unweighted graph was first introduced in [22], with subsequent applications in the study of information diffusion within social networks. For an unweighted graph and a subset , the differential of S is defined as , where denotes the set of vertices in adjacent to at least one vertex in S. The differential of the graph G is then given by:
A subset is called a ∂-set (or differential set) if it satisfies .
This notion naturally extends to weighted graphs. For a weighted graph and a subset , the differential of S is defined as:
where . Similarly, the differential of is defined as .
The following theorem establishes a relationship between the weighted Roman domination number and the differential of a weighted graph.
Theorem 7.
Let be a weighted graph. Then .
Proof.
Let f be a -function with its associated partition . By setting , we observe that and . Consequently, we have:
To prove the reverse inequality, let be a subset such that . We define a function as follows: if , if , otherwise. Since g is a wRDF, it follows that:
Thus, we conclude that . □
6. Discussion
While research on unweighted graphs is extensive, its application to real-world networks is often limited. Real-world structures typically consist of points of interest with varying degrees of relevance, which are more accurately modeled by graphs with vertex weights. In this paper, we have initiated the study of weighted Roman domination in weighted graphs. Specifically, we have established several bounds for the weighted Roman domination number in terms of graph invariants such as total weight, maximum weighted degree, and the weighted domination number.
Furthermore, we have determined the exact values of for specific families of graphs, including complete weighted graphs, complete bipartite weighted graphs, and weighted cycles. Finally, we have established a fundamental relationship between the weighted Roman domination number and the differential of a weighted graph.
As a continuation of this research, we suggest the following lines of investigation:
- Establish new lower bounds for in terms of the minimum weighted degree .
- Building upon Theorem 7, seek further refinements of the general bounds presented in this work.
Author Contributions
Conceptualization, M.C., P.G.-V. and J.C.V.-T.; methodology, M.C., P.G.-V. and J.C.V.-T.; validation, M.C., P.G.-V. and J.C.V.-T.; investigation, M.C., P.G.-V. and J.C.V.-T.; writing—review and editing, M.C., P.G.-V. and J.C.V.-T. All authors contributed equally to this work. All authors have read and agreed to the published version of the manuscript.
Funding
J.C. Valenzuela-Tripodoro was partially funded by the Spanish Ministry of Science, Innovation and Universities through project PID2022-139543OB-C41 and also by the European Commission’s Horizon Europe Research and Innovation programme through the Marie Sklodowska-Curie Actions Staff Exchanges (MSCA-SE) under Grant Agreement no.101182819 (COVER: (C)ombinatorial (O)ptimization for (V)ersatile Applications to (E)merging u(R)ban Problems). M. Cera and P. García-Vázquez were partially supported by the Research, Development, and Innovation Plan of the Regional Government of Andalusia under project FQM-240. M. Cera was partially funded by PPIT-FEDER through project SOL2024-31708: Mathematics for Cybersecurity and Smart City Development.
Data Availability Statement
No new data were created.
Acknowledgments
The authors gratefully acknowledge the helpful comments from the referees.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nitta, K.H. Topological Characteristics of Chain Molecules with Branching and Molar-Mass Distributions. Macromol. Theory Simul. 2021, 30, 2000080. [Google Scholar] [CrossRef]
- Sukharev, Y.N.; Nekrasov, Y.S.; Molgachova, N.S.; Tepfer, E.E. Computer processing and interpretation of mass spectral information. VIII—Ariadna system. Org. Mass Spectrom. 1991, 26, 770–776. [Google Scholar] [CrossRef]
- Álvarez, M.A.; Yan, C. A new protein graph model for function prediction. Comput. Biol. Chem. 2012, 37, 6–10. [Google Scholar] [CrossRef] [PubMed]
- Gaci, O. Community Structure Description in Amino Acid Interaction Networks. Interdiscip.-Sci.-Comput. Life Sci. 2011, 3, 50–56. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.L.; Jiang, H.; Wang, F.; Hua, Y.; Feng, D.; Guo, W.Z.; Wu, Y.X. Using High-Bandwidth Networks Efficiently for Fast Graph Computation. IEEE Trans. Parallel Distrib. Syst. 2019, 30, 1170–1183. [Google Scholar] [CrossRef]
- Zheng, S.Y.; Ren, Z.Y.; Cheng, W.C.; Zhang, H.L. Minimizing the Latency of Embedding Dependence-Aware SFCs into MEC Network via Graph Theory. In 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Birand, B.; Chudnovsky, M.; Ries, B.; Seymour, P.; Zussman, G.; Zwols, Y. Analyzing the Performance of Greedy Maximal Scheduling via Local Pooling and Graph Theory. IEEE-ACM Trans. Netw. 2012, 20, 163–176. [Google Scholar] [CrossRef]
- Haynes, T.W.; Hedetniemi, S.T.; Henning, M.A. Domination in Graphs: Core Concepts; Springer: Cham, Switzerland, 2023; ISBN 978-3-031-09495-8. [Google Scholar] [CrossRef]
- Bergsten, A.; Bodin, O.; Ecke, F. Protected areas in a landscape dominated by logging—A connectivity analysis that integrates varying protection levels with competition-colonization tradeoffs. Biol. Conserv. 2013, 160, 279–288. [Google Scholar] [CrossRef]
- Kanli, A.; Berberler, Z.N.O. Differential in infrastructure networks. RAIRO-Oper. Res. 2021, 55, S1249–S1259. [Google Scholar] [CrossRef]
- Stewart, I. Defend the Roman Empire! Sci. Am. 1999, 281, 136–139. [Google Scholar] [CrossRef]
- Cockayne, E.J.; Dreyer, P.A.; Hedetniemi, S.M.; Hedetniemi, S.T. Roman domination in graphs. Discret. Math. 2004, 278, 11–22. [Google Scholar] [CrossRef]
- Almulhim, A.; Al Subaiei, B.; Mondal, S.R. Survey on Roman 2-Domination. Mathematics 2024, 12, 2771. [Google Scholar] [CrossRef]
- Brezovnik, S.; Zerovnik, J. Roman Domination of Cartesian Bundles of Cycles over Cycles. Mathematics 2025, 13, 2351. [Google Scholar] [CrossRef]
- Favaron, O.; Karami, H.; Khoeilar, R.; Sheikholeslami, S.M. On the Roman domination number of a graph. Discret. Math. 2009, 309, 3447–3451. [Google Scholar] [CrossRef]
- Henning, M.A. Defending the Roman Empire from multiple attacks. Discret. Math. 2003, 271, 101–115. [Google Scholar] [CrossRef][Green Version]
- Fu, X.; Yang, Y.; Jiang, B. Roman domination in regular graphs. Discret. Math. 2009, 309, 1528–1537. [Google Scholar] [CrossRef]
- Henning, M.A. A characterization of Roman trees. Discuss. Math. Graph Theory 2002, 22, 325–334. [Google Scholar] [CrossRef]
- Gross, J.L.; Yellen, J.; Zhang, P. Handbook of Graph Theory, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2013; ISBN-13: 978-1439880180. [Google Scholar]
- Chartrand, G.; Jordon, H.; Vatter, V.; Zhang, P. Graphs and Digraphs, 7th ed.; Chapman and Hall: London, UK, 2024; ISBN 978-1032606989. [Google Scholar]
- Dankelmann, P.; Rautenbach, D.; Volkmann, L. Weighted Domination. J. Combin. Math. Combin. Comput. 2003, 45, 195–207. [Google Scholar]
- Mashburn, J.L.; Haynes, T.W.; Hedetniemi, S.M.; Hedetniemi, S.T.; Slater, P.J. Differentials in graphs. Util. Math. 2006, 69, 43–54. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.