
Partially Symmetric Regularized Two-Step Inertial Alternating Direction Method of Multipliers for Non-Convex Split Feasibility Problems

{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- (I)
- The Fréchet subdifferentiation of g at y dom g is defined as
- (II)
- The limit subdifferentiation of g at y dom g is defined as
- (I)
- is a closed convex set, is a closed set.
- (II)
- If , then .
- (III)
- If is the minimum point of g, then ; if , then y is the stable point of function g. The set of stable points of function g is denoted as crit g.
- (IV)
- For any y dom g, we get if is normal lower semi-continuous and is continuous differentiable.
- (I)
- .
- (II)
- is continuously differentiable on (0, ) and is also continuous at 0.
- (III)
- .
- (IV)
- , all KL inequalities hold:
- (I)
- If there are a finite number of real polynomial functions , such that
- (II)
- A funtion f: →(−∞, +∞] is called semi-algebraic if its graph
3. Split Feasibility Problem
3.1. Assumptions
- (1)
- and .
- (2)
- (3)
- Note , where,
- (4)
- Note and . and are fixed constants.
- (5)
- C, Q are both semi-algebraic sets.
- (6)
- f is lg-Lipschitz differentiable, i.e.,
- (7)
- g is proper lower semi-continuous.
- (8)
- The set is bounded.
3.2. Algorithm
| Algorithm 1 Partially Symmetric Regularized Two-step Inertial Alternating Direction Method of Multipliers for Non-convex Split Feasibility Problems (PSRTADMM) |
3.3. Convergence Analysis
- (1)
- The sequence is bounded.
- (2)
- is bounded from below and convergent, additionally,
- (3)
- The sequence and have the same limit
- (1)
- and are non-empty compact sets and .
- (2)
- if and only if
- (3)
- , is convergent and
- (4)
- .
- (1)
- .
- (2)
- {} converges to the stable point of L(.).
- (1)
- g is coercive, i.e., .
- (2)
- relaxation factor .
- (3)
- function has a lower bound and is coercive, i.e.,
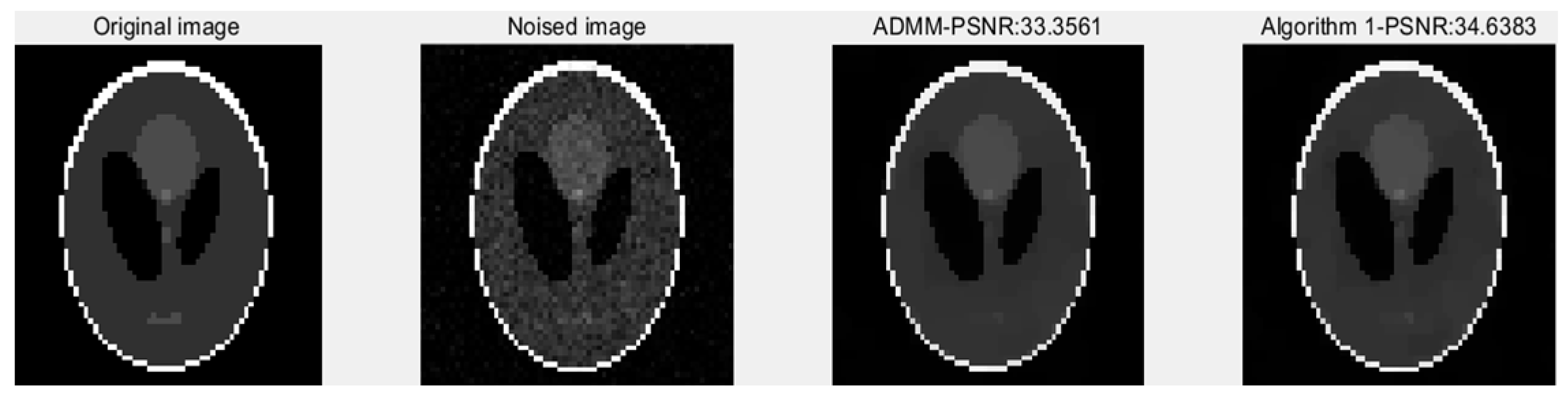
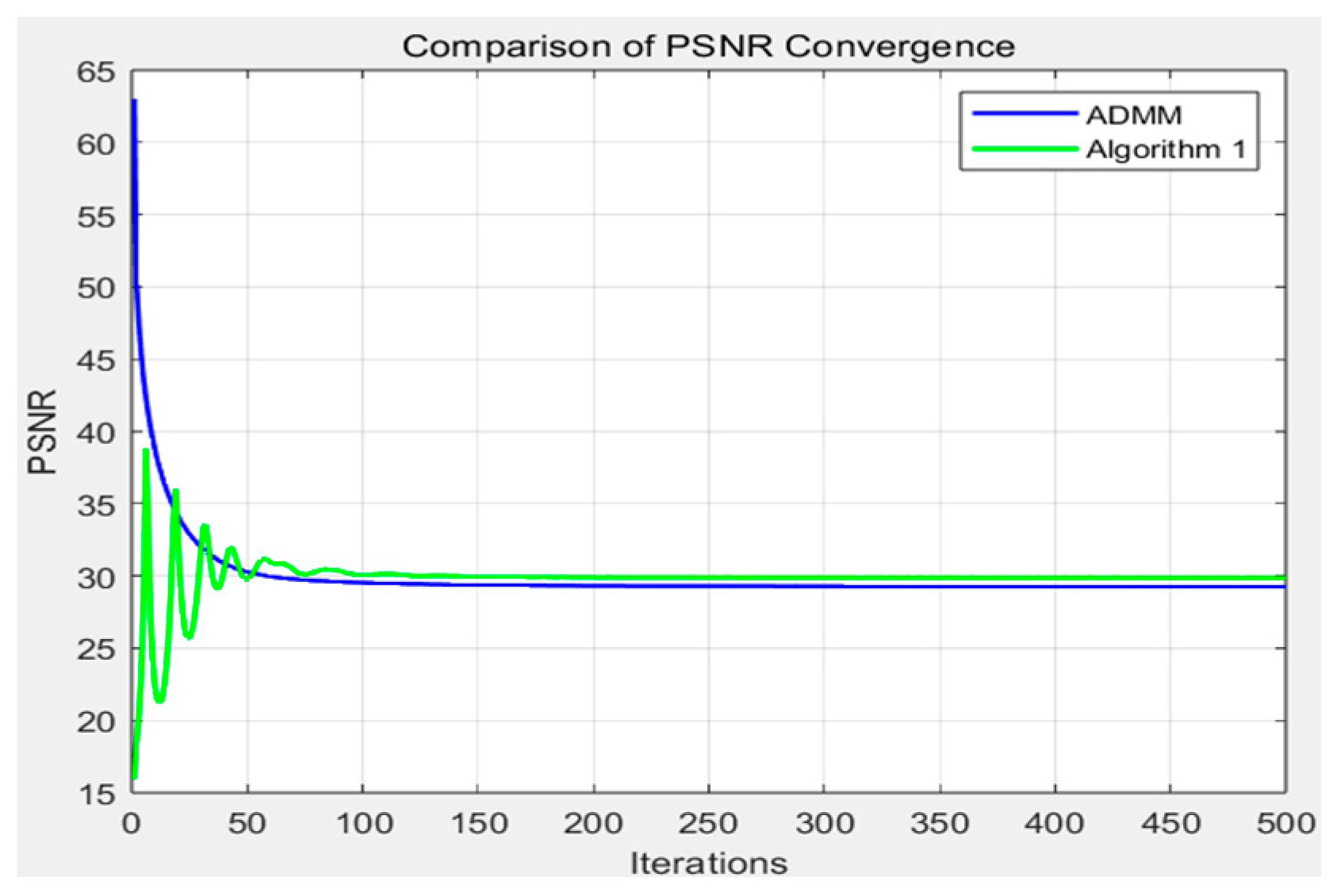
4. Numerical Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Yang, J.; Yin, W.; Zhang, Y. A New Alternating Minimization Algorithm for Total Variation Image Reconstruction. SIAM J. Imaging Sci. 2008, 1, 248–272. [Google Scholar] [CrossRef]
- Dong, B.; Li, J.; Shen, Z. X-Ray CT Image Reconstruction via Wavelet Frame Based Regularization and Radon Domain Inpainting. J. Sci. Comput. 2013, 54, 333–349. [Google Scholar] [CrossRef]
- Block, K.T.; Uecker, M.; Frahm, J. Undersampled radial MRI with multiple coils. Iterative image reconstruction using a total variation constraint. Magn. Reson. Med. 2007, 57, 1086–1098. [Google Scholar] [CrossRef]
- Liu, S.; Cao, J.; Liu, H.; Zhou, X.; Zhang, K.; Li, Z. MRI reconstruction via enhanced group sparsity and nonconvex regularization. Neurocomputing 2018, 272, 108–121. [Google Scholar] [CrossRef]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef]
- Gibali, A.; Kuefer, K.H.; Suess, P. Successive Linear Programing Approach for Solving the Nonlinear Split Feasibility Problem. J. Nonlinear Convex Anal. 2014, 15, 345–353. [Google Scholar]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441–453. [Google Scholar] [CrossRef]
- Censor, Y.; Motova, A.; Segal, A. Perturbed projections and subgradient projections for the multiple-sets split feasibility problem. J. Math. Anal. Appl. 2007, 327, 1244–1256. [Google Scholar] [CrossRef]
- Dang, Y.; Gao, Y. The strong convergence of a KM-CQ-like algorithm for a split feasibility problem. Inverse Probl. 2011, 27, 015007. [Google Scholar] [CrossRef]
- Qu, B.; Wang, C.; Xiu, N. Analysis on Newton projection method for the split feasibility problem. Comput. Optim. Appl. 2017, 67, 175–199. [Google Scholar] [CrossRef]
- Fukushima, M. Application of the alternating direction method of multipliers to separable convex programming problems. Comput. Optim. Appl. 1992, 1, 93–111. [Google Scholar] [CrossRef]
- Deng, W.; Yin, W. On the Global and Linear Convergence of the Generalized Alternating Direction Method of Multipliers. J. Sci. Comput. 2016, 66, 889–916. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, W.; Zeng, J. Global Convergence of ADMM in Nonconvex Nonsmooth Optimization. J. Sci. Comput. 2019, 78, 29–63. [Google Scholar] [CrossRef]
- Yang, Y.; Jia, Q.S.; Xu, Z.; Guan, X.; Spanos, C.J. Proximal ADMM for nonconvex and nonsmooth optimization. Automatica 2022, 146, 110551. [Google Scholar] [CrossRef]
- Ouyang, Y.; Chen, Y.; Lan, G.; Pasiliao, E., Jr. An Accelerated Linearized Alternating Direction Method of Multipliers. SIAM J. Imaging Sci. 2015, 8, 644–681. [Google Scholar] [CrossRef]
- Hong, M.; Luo, Z.-Q. On the linear convergence of the alternating direction method of multipliers. Math. Program. 2017, 162, 165–199. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, M.; Pen, X.; Tan, J. Partial symmetric regularized alternating direction method of multipliers for non-convex split feasibility problems. AIMS Math. 2025, 10, 3041–3061. [Google Scholar] [CrossRef]
- Dang, Y.; Chen, L.; Gao, Y. Multi-block relaxed-dual linear inertial ADMM algorithm for nonconvex and nonsmooth problems with nonseparable structures. Numer. Algorithms 2025, 98, 251–285. [Google Scholar] [CrossRef]
- Rockafellar, R.T.; Wets, R.J.-B. Variational Analysis; Springer Science and Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Bolte, J.; Daniilidis, A.; Lewis, A. The Lojasiewicz inequality for nonsmooth subanalytic functions with applications to subgradient dynamical systems. SIAM J. Optim. 2007, 17, 1205–1223. [Google Scholar] [CrossRef]
- Attouch, H.; Bolte, J.; Svaiter, B.F. Convergence of descent methods for semi-algebraic and tame problems: Proximal algorithms, forward–backward splitting, and regularized Gauss–Seidel methods. Math. Program. 2013, 137, 91–129. [Google Scholar] [CrossRef]
- Wang, F.; Cao, W.; Xu, Z. Convergence of multi-block Bregman ADMM for nonconvex composite problems. Sci. China-Inf. Sci. 2018, 61, 122101. [Google Scholar] [CrossRef]
- Nesterov, Y. Introductory Lectures on Convex Optimization: A Basic Course; Springer: New York, NY, USA, 2004. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Dang, Y. Partially Symmetric Regularized Two-Step Inertial Alternating Direction Method of Multipliers for Non-Convex Split Feasibility Problems. Mathematics 2025, 13, 1510. https://doi.org/10.3390/math13091510
Yang C, Dang Y. Partially Symmetric Regularized Two-Step Inertial Alternating Direction Method of Multipliers for Non-Convex Split Feasibility Problems. Mathematics. 2025; 13(9):1510. https://doi.org/10.3390/math13091510
Chicago/Turabian StyleYang, Can, and Yazheng Dang. 2025. "Partially Symmetric Regularized Two-Step Inertial Alternating Direction Method of Multipliers for Non-Convex Split Feasibility Problems" Mathematics 13, no. 9: 1510. https://doi.org/10.3390/math13091510
APA StyleYang, C., & Dang, Y. (2025). Partially Symmetric Regularized Two-Step Inertial Alternating Direction Method of Multipliers for Non-Convex Split Feasibility Problems. Mathematics, 13(9), 1510. https://doi.org/10.3390/math13091510