1. Introduction
The Pythagorean theorem is one of the most fundamental and enduring results in mathematics. This article explores its geometric significance through differential geometry, extending its classical formulation to higher-dimensional space forms.
The Pythagorean (or Pythagoras’ of Samos (570–495 BC)) Theorem: Geometrically: The sum of (the areas of) the two small squares equals (the area of) the big one. Algebraically: , where a and b are the legs of the triangle and c is the hypotenuse.
For centuries, people have been cited and used this theorem. Mordell [
1] and Nagell [
2] gave the Pythagorean triples and quadruples, algebraically, in their books.
Arnold and Eydelzon [
3] studied matrix Pythagorean triples. Crasmareanu [
4] introduced a new method to find Pythagorean triples with matrices. Aydın and Mihai [
5] worked on surfaces with Pythagorean fundamental forms in 3-space forms. Palmer, Ahuja, and Tikoo [
6] studied the Pythagorean triples preserving matrices. Some authors, such as [
7,
8,
9], gave the Pythagorean theorem in their books, historically.
Remarkably, the Babylonians empirically knew the hypotenuse length of a square, i.e.,
. See
Figure 1 (Left and Middle: written in the original Babylonian sexagesimal system using base 60; Right: converted to our decimal system using base 10) for the best-known ancient Babylonian tablet, known as YBC 7289, which is approximately 4000 years old and related to the Pythagorean theorem [
7,
9].
See [
10,
11] for more details on the Babylonian clay tablet YBC 7289.
Next, we give the fundamental notions of the differential geometry of hypersurfaces. See [
12] for details.
Let
denote the Euclidean
m-space, where
is a rectangular coordinate system, with the canonical Euclidean metric tensor defined by
. We denote the Levi-Civita connections [
13] of the manifold
and its submanifold
M of
by
respectively. We use the letters
(resp.,
) to denote the vectors fields tangent (resp., normal) to
M. The Gauss and Weingarten formulas are given, respectively, by
where
h,
D, and
A are the second fundamental form, the metric connection, and the shape operator of
M, respectively. The shape operator
is a symmetric endomorphism of the tangent space
at
for each
. The shape operator and the second fundamental form are related by
The Gauss and Codazzi equations are, respectively, defined by
where
are the curvature tensors related with connections ∇ and
D, respectively, and then
is given by the Levi-Civita connection
Let
M be an oriented hypersurface in
,
its shape operator, and
its position vector. Considering a local orthonormal frame field
consisting of principal directions of
M corresponding from the principal curvature
for
, we assume the dual basis of this frame field be
. Hence, the first structural equation of Cartan is given by
where
denotes the connection forms corresponding to the chosen frame field. Denoting the Levi-Civita connections of
M in
by ∇ and
, respectively, from the Codazzi Equation (
3), we obtain
for distinct
.
Taking
, where
is the
j-th symmetric function defined by
we use the following notation:
By the definition, we have and . Calling the function as the k-th mean curvature of M, the functions and are named the mean curvature and the Gauss–Kronecker curvature of M, respectively. M is called the j-minimal if on M.
In
finding the
i-th curvature formulas
, where
we use the following characteristic polynomial of
:
and
denotes the identity matrix of order
Then, we obtain curvature formulas
. Here,
(by definition),
k-th fundamental form of
M is defined by
Recently, Güler [
14] introduced curvature formulas for hypersurfaces in four-dimensional space. For further details on the nature of hypersurfaces, see also [
15,
16,
17,
18].
In this work, we present several results related to the Pythagorean
formula. In
Section 2, we introduce the Pythagorean triples
using fundamental form matrices of surfaces in three-dimensional space forms.
In
Section 3, we examine Pythagorean quadruples
using fundamental form matrices of hypersurfaces in four-dimensional space forms
, where
.
In
Section 4, we generalize the Pythagorean formula for hypersurfaces immersed in
using matrices corresponding to the fundamental forms
of the hypersurface. Additionally, we show that an immersed hypersphere
with radius
r in
satisfies the Pythagorean
-tuple equation
. Remarkably, as
and
, we reveal that the radius converges to
for the hypersphere
. Finally, we show that the determinant of the
formula characterizes an umbilical round hypersphere satisfying
, i.e.,
in
.
3. The Pythagorean Quadruples
Let , and let be a quadruple with , called a Pythagorean quadruple (we called it ).
In addition, if is a , so is for any . If gcd , the quadruple is named a primitive Pythagorean quadruple. Here are some of the quadruples , , , , , and
See [
1,
2,
20,
21] for the algebric cases, and for the geometric cases [
3,
4,
5,
6] of the Pythagorean theorem. Considering the algebraic findings of it, we continue our computations with the geometric ways. Nelsen [
22] gave the proof of the Pythagorean quadruples, virtually.
The set of the primitive Pythagorean quadruples for which
a is odd can be obtained by
where
are the non-negative integers, gcd
, and
is odd. Here,
is also known as Lebesgue’s identity. See [
2] for Lebesgue’s identity.
Better understanding the Pythagorean quadruples
, we consider the Hopf fibration map defined by Hopf:
or briefly, it is defined by Hopf:
Adding on the last term
d of Equation (
27) on the image Hopf
, we can define
, as follows:
where
are the non-negative integers; gcd
; and
is odd. Then, we obtain that
transforms into a Pythagorean quadruple (
27).
Let be a 4-dimensional Riemannian space form, which has constant sectional curvature , with metric While , represents a hyperbolic space Euclidean space 4-sphere respectively. The hypersphere with radius r in is defined by , and the hyperquadric in Lorentz–Minkowski space is defined by We remark that the open hemi-hypersphere, which has all points of , is , where
We assume
to be an orientable hypersurface immersed into
For any hypersurface of
, taking
in Equation (
9), the fundamental forms and the curvatures are related by
Here,
See [
14] for details.
Next, we consider a hypersurface
immersed in a space form
,
, satisfying Pythagorean quadruples Equation
:
geometrically. In the next theorem, we only use the following 3-sphere
with spherical representing
:
where
and
It can be given for
and
similarly.
Theorem 1. The Pythagorean quadruple given Equation (29) of the hypersphere determined by Equation (30) can be denoted by has the Pythagorean quadruple described by Equation (29) if and only if the following algebraic equation holds:where . Proof. Let
with
be a Euclidean 4-space
, and let
be a hypersphere with radius
r given by Equation (
30). Then, we compute the fundamental forms of the hypersphere as follows
Using Equation (
29), and with the help of the fundamantel form matrices of the
, we obtain
and
The shape operator matrix of the hypersphere described by Equation (
30) is given by
where
is the identitity matrix. See [
14] for details.
Numerical solutions of the Equation (
31) are
≈ 0.54369,
Since
we have
□
Next, we indicate the solutions of the Pythagorean quadruples formula using two different ways with the fundamental form matrices.
3.1. First Solution of the Pythagorean Quadruples Formula
Substituting
of Equation (
28) into the right side of Equation (
29), we have the Pythagorean quadruple formula
as follows
Taking into account
for matrices in general, and
after some computations, we obtain the following equation
To shorten the computations, we use
Substituting the shape operator
the first fundamental form
and the identity
matrices into the Equation (
33), we obtain
where
Since
, where
Hence,
, and
Adding diagonal elements
and other elements
we find
respectively. We use
and
to obtain Equations (
40) and (
41). Therefore, by replacing
with
respectively, Equations (
40) and (
41) reduce to
and
, as follows
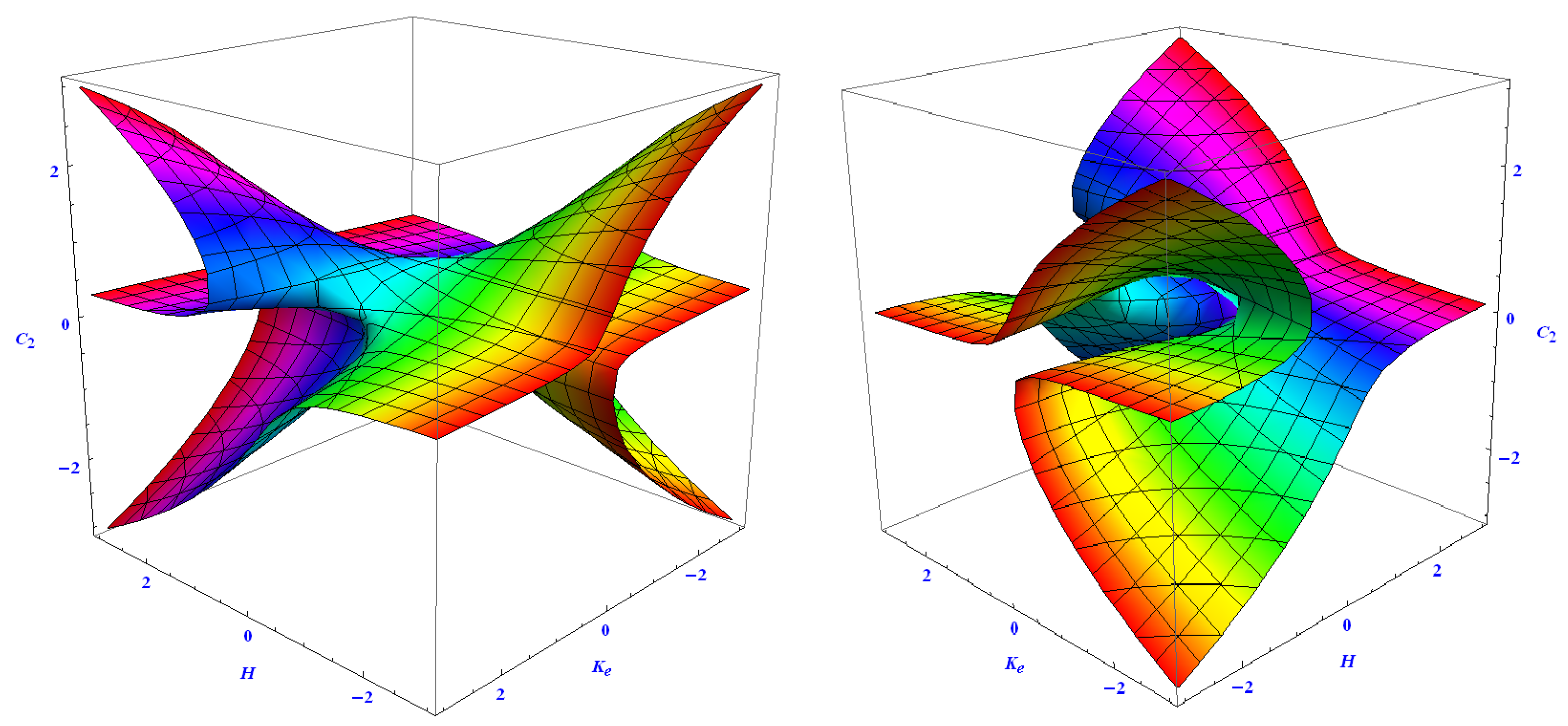
respectively. Equations (
42) and (
43) are the implicit algebraic surfaces. See
Figure 3 and
Figure 4, respectively.
solutions of Equations (
42) and (
43) and are as follows
respectively.
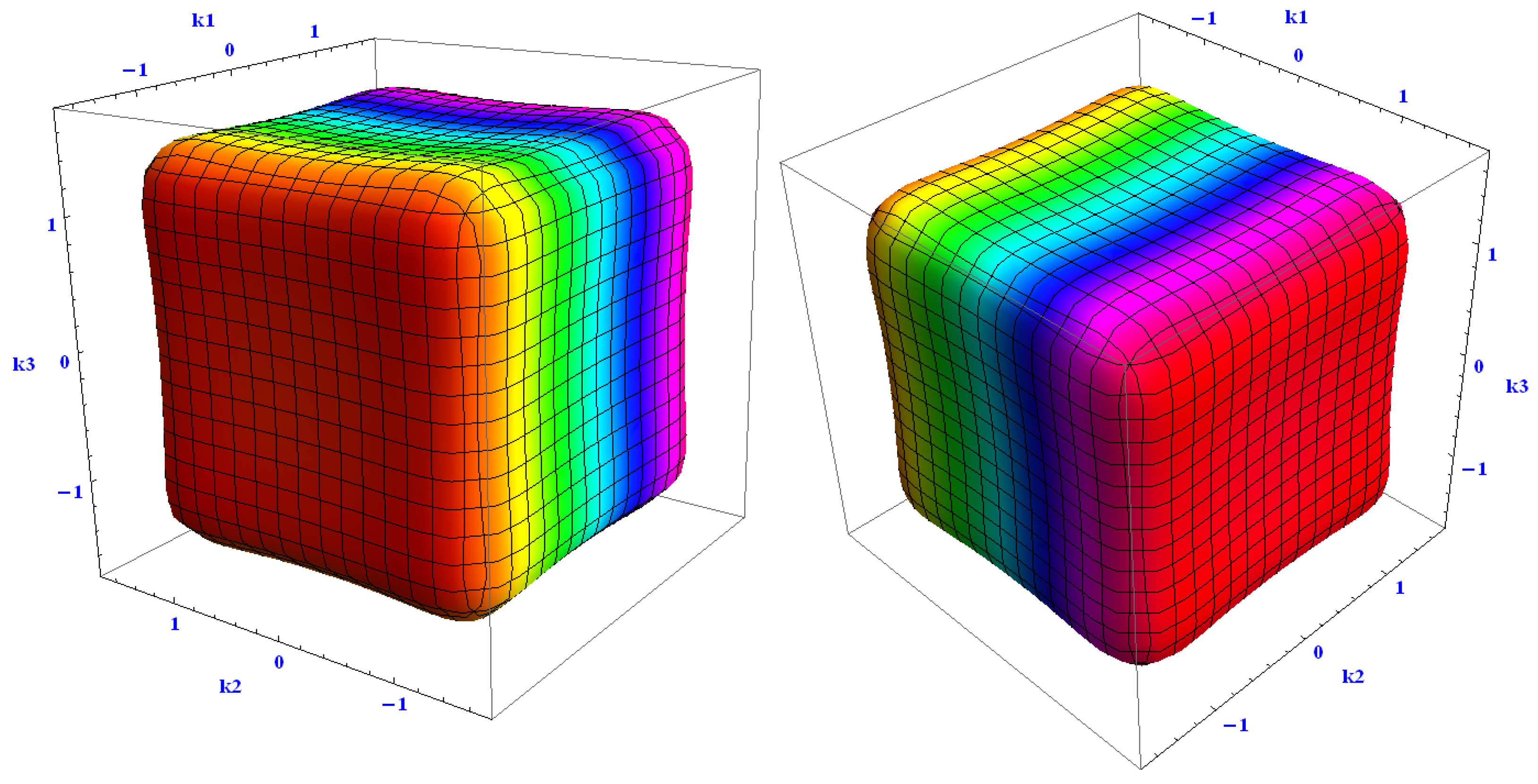
We also obtain that the implicit algebraic surfaces depend on the principal curvatures
as
and
replacing
with
respectively, in Equation (
42) and Equation (
43). See
Figure 5 and
Figure 6 for the algebraic surfaces
respectively.
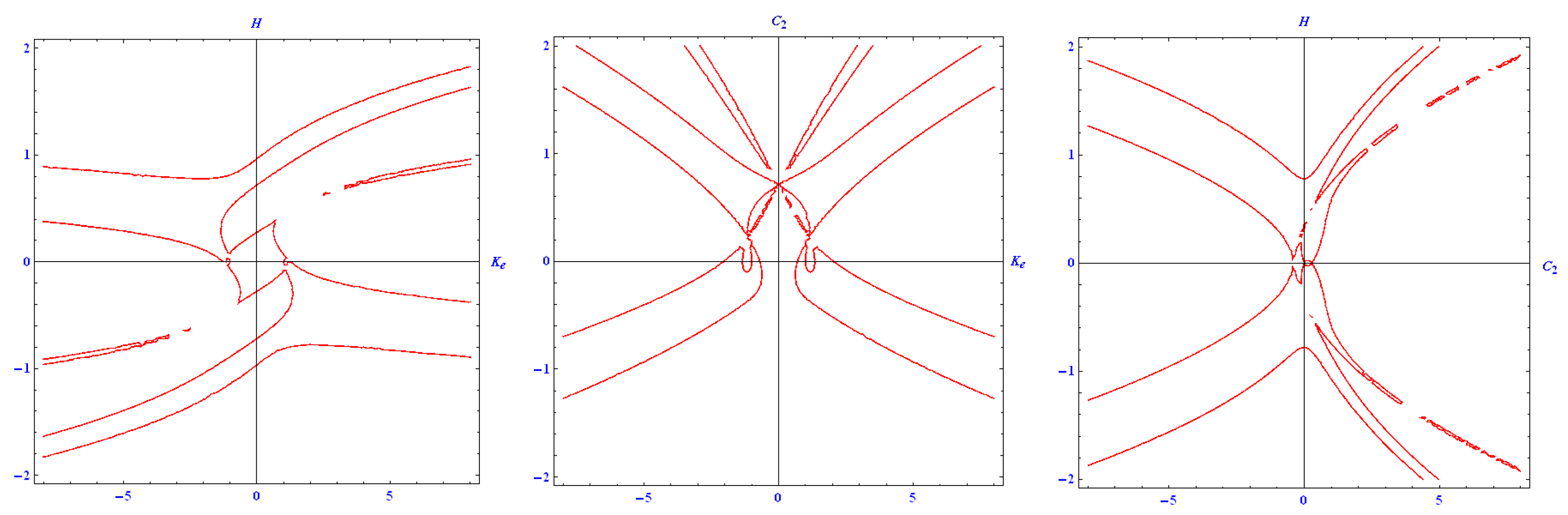
Eliminating
respectively, in Equation (
42) and Equation (
43), we have the following implicit algebraic equations.
(see
Figure 7, Left),
(See
Figure 7, Middle), and
(see
Figure 7, Right), respectively.
We obtain the implicit algebraic surface, which depends on principal curvatures
as
replacing
with
respectively, in
See
Figure 8 for the algebraic surface
.
3.2. Second Solution of the Pythagorean Quadruple Formula
Before defining the umbilical hypersurface in 4-space, we make some remarks.
Remark 1. The following are equivalent Remark 2. The following are equivalent Remark 3. Using the results of the Remarks 1 and 2 together, we have Next, we describe the umbilical hypersurface of four dimensional space.
Definition 2. The hypersurface immersed into a , is called umbilical if all its points are umbilical, i.e., or, equivalently, with .
The only umbilical hypersurfaces are (open to) hyperplanes and hyperspheres in .
Next, taking determinants of both sides of
we obtain
Here,
are given by Equations (
34), (
35), (
36), (
37), (
38), and (
39), respectively. Hence, the above Equation reduces to
Then,
transforms to the following
by using
Therefore, we obtain the following.
Corollary 4. Since , the determinant of the matrix (44) satisfiesby using We also have the following.
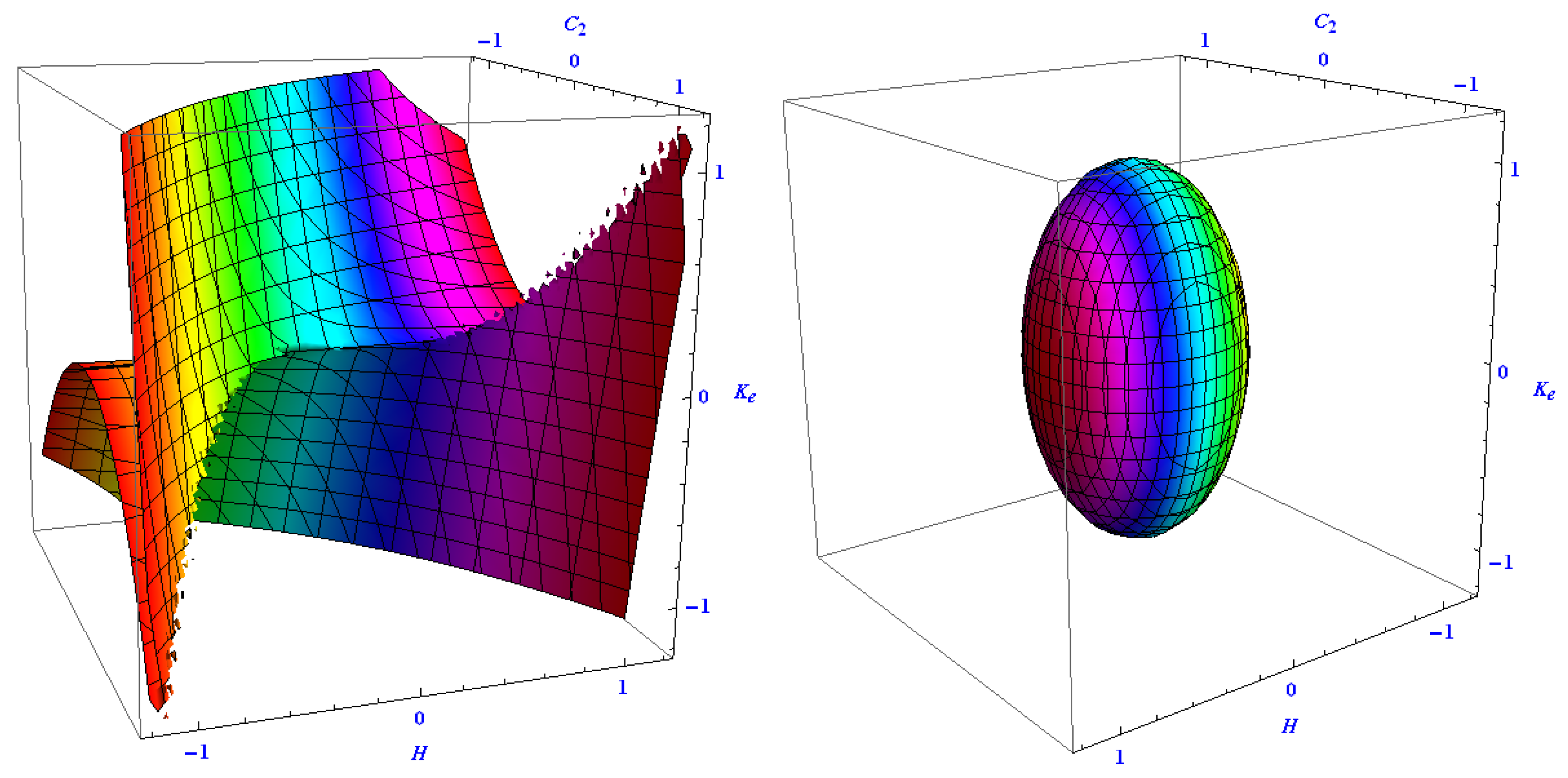
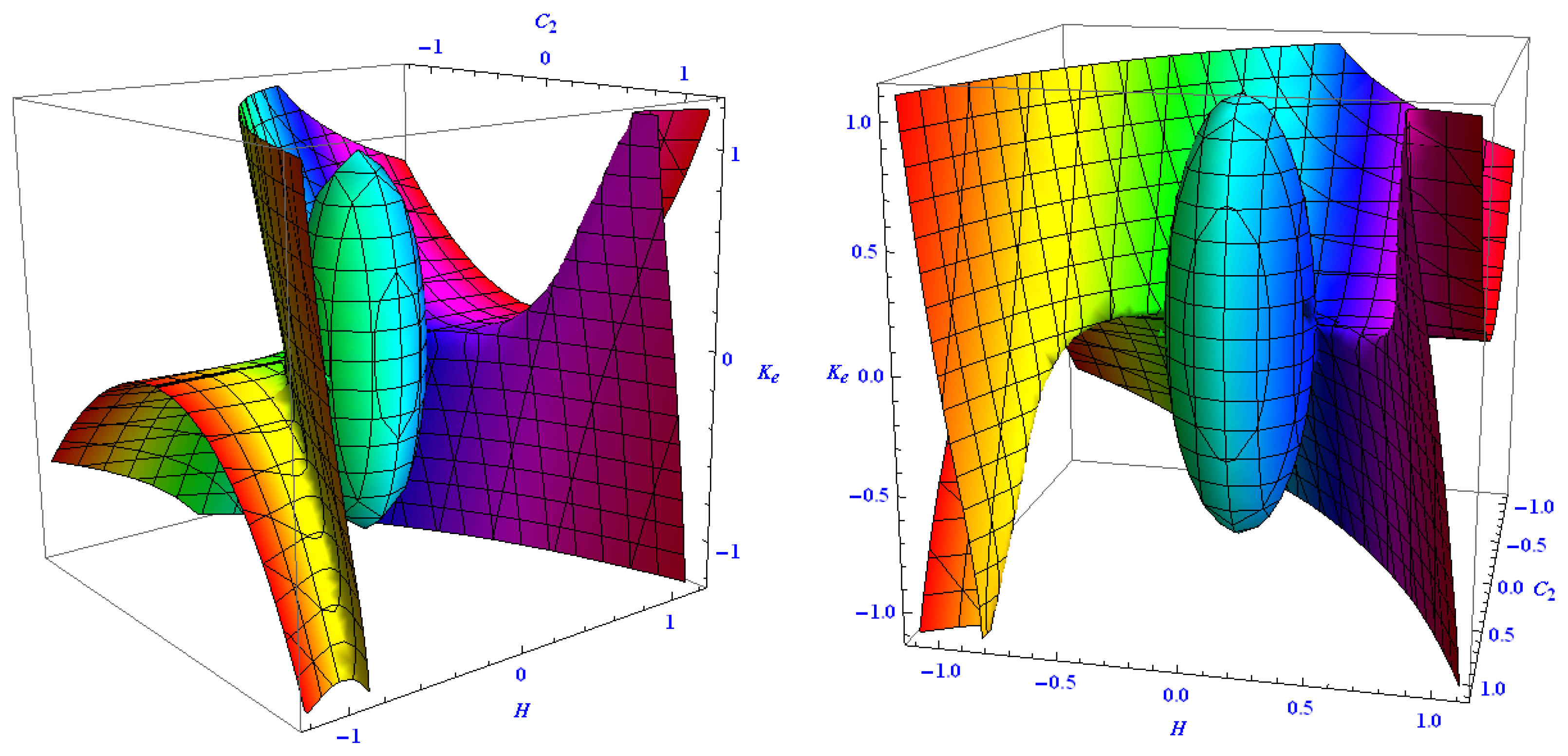
Corollary 5 (Geometric Conclusion 2). The determinant given by Equation (45) of the matrix described by Equation (44) draws the surface with and the ellipsoid surface The determinant of the
is also given by as follows
Here,
is the implicit surface as
(See
Figure 9, Left), satisfying
with
, and the implicit ellipsoid, or ellipsoidal surface
as
(See
Figure 9, Right).
Hence, extending the determinant of the
we obtain the implicit algebraic surface
as follows (see
Figure 10):
Corollary 6. The determinant given by Equation (45) of the matrix described by Equation (44) corresponds to an umbilical round hypersphere where the principal curvatures satisfy . In other words, it satisfies with and in , where . We remark that this work relies on the Phythagorean formula but does not depend on the distance between points in the running space form.
On the other hand, we use the upper hypersphere
with the Cartesian map
given by
where
Next, we compute the fundamental forms of the upper hypersphere given by Equation (
46). The first fundamental form matrix of it as follows
Then, the shape operator matrix is given by
We obtain
, and
easily.
Taking into account the Pythagorean quadruple formula
of the hypersphere described by Equation (
46), and considering
we have the following.
Corollary 7. The hypersphere given by Equation (46) has the Pythagorean quadruple formula mentioned by (29) if and only if the following holds The roots of above equation are
Here, the positive and real
solution is also given in the second row of the
Table 1.
Let
be an immersed hypersurface into
,
, or
is named totally geodesic while
and totally umbilical while
, where
is a constant. When
, then
and
. This is not possible for the Pythagorean
formula. On the other hand, while
is degenerate (i.e.,
), using Equations (
28) and (
29), and considering
we obtain
, which contradicts
So,
When
is minimal, and
using Equations (
28) and (
29) again, we find the following:
Taking both sides of the determinant, we have
Here,
has 4 complex roots, 1 negative real root (
,
), and the following positive real root (
where
Then,
is a constant. When the space is
or
, then
should be totally geodesic (see [
23,
24] for
case.). Then, it gives a contradiction.
Therefore, the case of
and
is totally geodesic and does not take place. The case of
,
is an open piece of the Clifford torus. Then,
, which is incompatible with Equation (
47). So, the immersed hypersurface into
,
, or
supplying the
formula mentioned by Equation (
29) cannot be totally geodesic, may not be minimal, and does not have a degenerate second fundamental form.
On the other side, we want to see the real solutions of
for some integers. See
Table 1,
Table 2,
Table 3 and
Table 4 for some solutions to it. To see the real solutions of
in
on graphics depending on
x and
r, respectively, see
Figure 11.
In dimension 200, i.e., in
,
x and
r solutions of the Pythagorean 200-tuples of the
are as follows (with 321 digits):
and
Interestingly, when the dimension
n increasing regularly, we observe that
and
from all of the above results. To understand the larger results of the Pythagorean
-tuples, virtually, see
Figure 11.
4. Pythagorean -Tuples
In this section, considering all findings of the previous two sections, we obtain the generalized Pythagorean formula using the fundamental form matrices for the hypersurfaces in higher dimension space forms.
Theorem 2. Let a hypersurface immersed into a -dimensional Riemannian space form , satisfy the following Pythagorean -tuples equationif and only if the following algebraic equation holds:where Here, are the fundamental form matrices of the hypersurface . Proof. Let
be an immersed hypersurface into
,
, or
The shape operator matrix is given by
where
is the identitity matrix. The
given by Equation (
48) of the hypersurface can be denoted by
Considering the
determined by Equation (
48) with the fundamantel form matrices of the hypersurface, we obtain
and
The hypersurface
has the Pythagorean
-tuples
described by Equation if and only if algebraic equation
holds, where
.
Additionally, the geometric series is defined by
where
. Therefore, we have the following
□
Corollary 8. Let be an immersed hypersphere into , with radius r satisfying the Pythagorean -tuples mentioned by Equation (48). When then and . Next, we define the umbilic hypersurface, then give a generalization of the determinant of the Pythagorean -tuples formula.
Definition 3. The hypersurface immersed into a -dimensional Riemannian space form , is called umbilical if all its points are umbilical, i.e., or, equivalently, .
Proposition 1. Let a hypersurface immersed into a , satisfy the Pythagorean -tuples formulaThen, the determinant of Equation (50) is given byor equivalently bywhere Finally, we have the following.
Conjecture 1. The determinant of the matrix, as defined in Equation (50), generates a hypersurface and a hyperellipsoid in , where .
Then, we present the following generalization for the determinant of .
Conjecture 2. The determinant given by Equation (51) (or equivalently by Equation (52)) of the formula mentioned by Equation corresponds to an umbilical round hypersphere satisfying
, i.e.,
, in
, where
.
5. Conclusions
This article provides a thorough investigation of the Pythagorean theorem from the perspective of differential geometry, offering insightful generalizations in higher-dimensional space forms. It establishes a connection between classical geometric identities and the intrinsic properties of hypersurfaces, filling a notable gap in the field.
Specifically, the paper generalizes that an immersed hypersphere with radius r in , where , satisfies the -tuple Pythagorean formula. Furthermore, as the dimension and the fundamental form , it is shown that .
Finally, the paper proposes that the determinant of the Pythagorean formula characterizes an umbilical round hypersphere with equal principal curvatures, satisfying in . These findings contribute to a broader understanding of curvature relations and their role in the geometry of hypersurfaces.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}