Abstract
This article proposes a time-synchronized fault-tolerant convergence control method for n-degree-of-freedom robotic manipulators. The main challenge lies in driving the tracking errors of all joints to converge simultaneously, especially in the presence of system faults, external disturbances, and model uncertainties. We introduce a normalized sign function that guarantees the property of ratio persistence for all joints and plays a crucial role in time-synchronized convergence control. A time-synchronized convergence observer is proposed that not only adopts a time-synchronized convergence control framework but also overcomes the lumped uncertainty term, which includes the system fault components, external disturbances, and system uncertainties. A salient feature of this method is that, regardless of the initial state and various uncertainties, each component of the robot manipulator system can simultaneously converge to an equilibrium point. Simulations conducted on a two-link robotic manipulator demonstrate the notable benefits of the designed time-synchronized control method, as evidenced by the comparative results.
MSC:
37M05
1. Introduction
Robotic manipulators are increasingly popular in various fields, including in industrial, medical, and agricultural applications. Consequently, the control of robotic manipulators has garnered significant interest among scholars and researchers [1,2,3,4]. Substantial contributions have been made in the field of robotic manipulator control. For example, robust control was proposed [5] using a fuzzy logic system to offset disturbances and unknown system uncertainties, the stability of the uniform ultimate boundedness (UUB) was achieved, and the tracking errors converged exponentially. The experiments verified the good performance of the method. In [6], an event-driven strategy was designed for the tracking task of a robot and reduce control energy, taking into account transient performance. To improve the learning capacity and control efficacy of robotic manipulators, intelligent control strategies employing critic learning methods and fuzzy logic are proposed in [7]. The system states proven in the above references [5,6,7] are all UUB.
To improve the system convergence time, the finite-time control of robotic manipulators was studied in [8,9,10]. Among them, a novel controller was proposed [8] involving a super-twisting method for robotic manipulators, which had robustness to nonlinear model uncertainties and measurement noise. Tracking control for a robot manipulator was proposed based on in [9] considering prescribed performance and uncertain inertia, which drive all states to converge in a certain time dependent on the initial values. A finite-time tracking control method was designed in [10], and the joint-drift problem was solved.
To enhance system convergence performance, fixed-time control has attracted considerable attention from researchers [11,12,13,14,15]. A controller for constrained robotic manipulators under the conditions of system outputs and system uncertainties using barrier Lyapunov function and neural networks was proposed [11]. Different from previous reinforcement learning (RL)-based finite-time control methods, ah RL-based fixed-time framework is designed in [12] to achieve optimal performance. In [13], adaptive technology was adopted to compensate for robotic manipulator uncertainties, and fixed-time stability was achieved using sliding-mode control without a singularity problem. Control strategies for robots under uncertainty, by utilizing a performance function and a predefined fixed- time method, are proposed in [14] and [15], respectively.
In addition, during robotic manipulator operations, faults such as sensor or actuator failures are common. Without appropriate proactive measures, these can cause the control system to fail. Consequently, many scholars have focused on fault-tolerant control and achieved successful results. Fuzzy logic and disturbance observers have been collaboratively used to address fault components, as demonstrated in [16,17]. Utilizing backstepping and sliding-mode technologies, UUB, finite, and fixed-time stabilities have been achieved. Robust adaptive technology to address actuator faults in robotic manipulators was proposed [5]. Additionally, fault tolerance was addressed within multiagent systems using the critic–actor approach and barrier functions, as described in [18].
However, neither unified uniformly ultimately boundedness nor finite or fixed-time control, as referred to above, can achieve simultaneous convergence performance of time-synchronized (TS) control, where the tracking errors of all joints converge to equilibrium at the exact same moment. In certain industrial sectors, aerospace engineering, and other precision operations, time-synchronized control is crucial and may determine the success or failure of a task [19]. To implement TS control in robotic manipulator systems, ref. [20] introduced a synchronous neural network strategy, ultimately achieving fixed TS control. In [21], a finite-time synchronization method was designed for primary–seconard neural networks by constructing a synchronization error system. Unlike the methods discussed in [20,21,22,23], TS control in [19] was implemented using a novel concept of ratio persistence, along with sliding-mode control. These studies show that when a system integrates “ratio persistence” with “finite-time control” or “fixed-time control”, TS stability is achieved, causing all state elements to converge simultaneously. Simulations have demonstrated the effectiveness of this concurrent convergence. The primary distinctions between the methods in [20,21,22] and those in [19] are also discussed in [24]. Subsequently, the application of TS control has been extended to MIMO systems in maritime and aerospace domains. In [25], a TS control method was developed for maritime surface vehicles that ensures all states converge to the equilibrium point simultaneously while accounting for external disturbances. To improve the transmission security of chaotic systems, [26] proposed a fixed TS control approach. The work points out that TS control can be considered as an exceptional form of finite/fixed-time control, but it requires more stringent conditions, i.e., for all state components to converge simultaneously. However, it is important to recognize certain factors that may constrain the advancement of the time-synchronized control of robotic manipulators: (1) system fault components that could render the synchronous convergence of all robotic joints unfeasible or cause abrupt control system failures; (2) as described above, the system friction matrix or external disturbances that can significantly impair TS convergence performance, with time-synchronized stability requiring stricter conditions than finite/fixed-time stability; (3) the formulation of synchronization and cross-coupling errors between primary and secondary joints in n-degree-of-freedom (DOF) manipulators, introducing complexities to the control system and the potential for additional stability issues.
Inspired by the preceding discussion and to achieve the synchronized control of manipulators while addressing the cross-coupling issue among joints, this article develops a time-synchronized control method that diverges from those presented in [20,21,22].
The following is a summary of this work’s foremost contributions:
- Compared to [21,22,23], we propose a time-synchronized control method that reduces the complexity of the controller’s structure and relaxes the criteria for establishing synchronization and cross-coupling errors. Unlike the fixed-time control approaches in [11,12,13,14,15], our method ensures that the variables across all system state degrees converge to an equilibrium simultaneously within a fixed period, regardless of the initial circumstances. The proposed method can pave the way for further investigation sof the robotic time-synchronization problem.
- Contrary to the TS control proposed in [19,25,26], our framework incorporates system fault components, rendering it more applicable to real-world engineering situations.
- A time-synchronized observer is proposed to manage lumped uncertainties, including system faults, external disturbances, and system uncertainties (EDSU). This observer not only estimates uncertainty precisely within a finite timeframe, enhancing tracking accuracy, but is also well integrated into the TS control framework. Consequently, high-precision tracking and robust performance are achieved, even in the face of actuator faults.
2. Preliminaries
Consider the following scalar system:
where is a continuous function in an open neighborhood U with origin . .
Lemma 1
([27]). The system’s origin, as characterized by (1), achieves fast finite-time stability if there exists a positive definite Lyapunov function satisfying
where α, β, and γ are positive constants, and . The settling time , which is dependent on the initial states , is given by
Lemma 2
([24]). If there exists a continuous radial bounded function , the following is satisfied:
where , , m, and n are all positive constants, , and . The system’s origin, described by (1), achieves fixed-time stability, where the settling time T is unaffected by the initial states of the system and is given by
Definition 1
([19]). The state x of the system defined by (1) exhibits ratio persistence if
where ξ represents the direction, and .
Definition 2.
The solution of (1) achieves TS stability if, for all , there exists a finite-time constant T, such that for and for all nonzero initial conditions , whereas for . The time function T is called the settling time of TS stability. Furthermore, if the converge time T is dependent on the initial states of the system, then the solution of (1) shows finite TS stability; otherwise, it shows fixed TS stability.
Remark 1.
Definition 2 reveals that TS stability is achieved on the basis of finite/fixed-time stability; the essential difference between TS stability and finite/fixed-time stability is whether all elements of the system (1) converge simultaneously.
Lemma 3
([19]). The origin of system (1) is finite TS stable if
- (1)
- the equilibrium is finite-time stable;
- (2)
- x shows ratio persistence.
Lemma 4.
The origin of system (1) shows fixed TS stability if
- (1)
- The equilibrium shows fixed-time stability;
- (2)
- x is ratio-persistent.
Definition 3.
For , a normalized sign function is defined:
Furthermore, its exponential form is defined:
where represents the norm of ·; is an adjustable constant.
Remark 2.
A normalized sign function is defined here differently from the traditional sign function, which plays a crucial part in the subsequent proof of ratio persistence and TS stability.
3. Main Results
3.1. Problem Description
An n-DOF robotic manipulator’s mathematical model is written as
where , , and indicate the robot’s position, velocity, and acceleration. denotes the inertia matrix and has the property of . and represent the Coriolis-centripetal and gravitational matrix, respectively. denotes the physical input of the controller. is the unknown fraction matrix, and represents nonlinear term induced by EDSU. reveals the fault components. denotes the fault time profile, which is formulated as
where , represents that the ith joint experiences a fault at time constant , and is given by
A positive represents the varying of the fault components. It reveals that when varies from 0 to , an incipient fault to an abrupt fault is introduced.
It is common for robot manipulators to malfunction in practice, such as due to the failures of sensors or actuators. Here, the gain fault and bias fault are considered. Taking these into account, the control input in (9) is transformed to
where represent gain and bias faults, respectively. and denote the actual and desired control signal. Then, the fault function of can be rewritten as
Letting and , system (9) can be transformed to the following format:
where , represent lumped unknown terms, including disturbances, friction, and actuator failures.
Remark 3.
Compared with [17], the system faults are incorporated with the disturbance and friction terms, which simplifies the state-space expressions.
The target position is denoted by . Then, the tracking error can be calculated:
The control objectives of this work were to design a fixed TS controller, such that the following statements hold:
(1) Tracking errors of the n-DOF robotic manipulator can converge to zero in a fixed time T, and T is unaffected by the system’s initial values. Meanwhile, the tracking errors of all state components converge at the same moment under the effects of actuator faults and EDSU, i.e., for , and hold, where is the ith element of .
(2) All elements of the EDSU and faulty unity can be precisely estimated, and the observer is compatible with the framework for fixed TS control.
3.2. Time-Synchronized Observer Design
To compensate for lumped uncertainties including EDSU and actuator faults, system (14) is reconstructed with a positive auxiliary variable :
where is a positive constant, .
Define as an auxiliary stat; then, an auxiliary system is established:
We can determine the value of through measurement.
Error and output variable y are expressed as follows:
where denotes a constant, and .
The following observer is designed to compensate for the lumped unknown term according to and y:
where represents the observed value of . The format of is
where , and are positive constants and represent the gains; is a constant and satisfies . is a normalized sign function and plays a vital role in TS control.
Remark 4.
The proposed observer addresses the lumped unknown term, accounting for actuator failure, disturbances, and friction without the need for additional methods to handle actuator faults separately, thereby simplifying the controller and increasing its engineering practicality. Additionally, the assumption of upper boundedness is relaxed. Furthermore, the disturbance observer presented here exhibits advance robust performance and can adapt to various disturbances or actuator failures using the same set of parameters.
Theorem 1.
Proof.
Based on (16)–(18), we can obtain
The observe error is
Combining (21) and (22), we have
Furthermore,
Choose a Lyapunov function of :
Then, the derivation of is
According to Lemma 1, state exhibits finite-time stability. Solving (27) yields
where the settling time .
By calculating
Therefore, according to Definition 1, state variable shows ratio persistence. Furthermore, shows finite TS stability, and the elements of converge to zero simultaneously at .
Based on (23), we have
Thus, for , the estimated value provided by the time-synchronized observer equals the actual value. □
Remark 5.
If the tracking error’s convergence time exceeds that of the observation error, the observation error converges first. The effects of the time-synchronization controller enable the tracking error to achieve time-synchronized performance. When the convergence time of the tracking error is less than the observation error, and if the observer shows conventional asymptotic stability and finite/fixed-time stability, due to the observer’s lack of time-synchronization stability performance, the convergence time of each state component is different, and the overall system cannot achieve TS convergence. Therefore, the existing observers are not compatible with the time-synchronization stability framework. The proposed disturbance observer can guarantee all state components convergence simultaneously; regardless of whether the observation error lags behind the convergence of tracking errors, the entire system shows TS stability, which is compatible with the framework of TS stability control.
To demonstrate the simultaneous convergence of the observer error, the proof is conducted using the contradiction method.
Based on (29), we have
where .
For , and ,
Substituting and into (32), we can obtain
Therefore, , and ,
where is a nonzero constant. Furthermore, we have
Based on (28), observation error can reach zero in a finite time. Assume that and arrive at the zero point at time and , respectively, . Then, according to (33), we have
As a continuous system, it can be concluded that , which is contradicts the assumption that arrives at zero at time . So, all elements converge simultaneously.
3.3. Time-Synchronized Fault-Tolerant Control Design
Construct a sliding-mode surface,
where is the switching law and is designed as follows:
where represents a small constant; and represent positive constants. To the avoid singularity problem, and are chosen as and . In order to avoid the singularity problem, , satisfies
Auxiliary variable is designed as
The fixed TS control strategy is formulated as
where , , , and are positive constants, , and .
Remark 6.
The proposed sliding-mode surface (38) effectively avoids the singularity issue.
Upon calculating the derivative of , we obtain
where
Theorem 2.
Consider the robotic manipulator system expressed in (9): under the effect of the time-synchronized observer (20,21) and fixed TS control (42) in sliding mode (38), all states of the tracking error can converge at the same moment , where and are given in (48) and (54), and is independent of the initial states.
Proof.
Consider the following candidate Lyapunov function:
According to Theorem 1, if , holds. Therefore, it follows that
Hence, s shows fixed-time stability, for , and settling time is independent of the initial states, which means that the tracking error converges to the sliding-mode manifold when . is given as below:
Furthermore,
According to Definition 1, s is satisfied and has ratio persistence. Based on Lemma 4, we can draw the conclusion that s shows fixed-time stability and ratio persistence; therefore, s shows fixed TS stability, and all elements of s converge simultaneously, i.e., when holds; when holds, where means the ith element of vector s. The proof follows a similar process to that of the time-synchronized disturbance observer, as outlined in Equations (31)–(36).
After s converges to zero, according to (41), we have
which may lead to
Therefore, according to Definition 1, tracking error state shows ratio persistence.
Next, we can construct a candidate Lyapunov function of the tracking error as follows:
Differentiating along time and substituting (50) into it, we have
Therefore, shows fixed TS stability, and the settling time is
which leads to the total settling time of state satisfying .
Next, the simultaneous convergence performance is described.
Based on (51), one can obtain
where .
For and ,
Substituting and into (56), one can obtain
Therefore, and ,
where is a nonzero constant. Furthermore, we have
Based on (53), tracking error arrives at the equilibrium point of 0 in a fixed time. Assume that and arrive at 0 at different moments and , respectively, . Then, based on (57),
As a continuous system, it can be concluded that , which contradicts the assumption of reaching equilibrium at time . Therefore, all state components arrive at equilibrium simultaneously. This concludes the proof. □
4. Results and Discussion
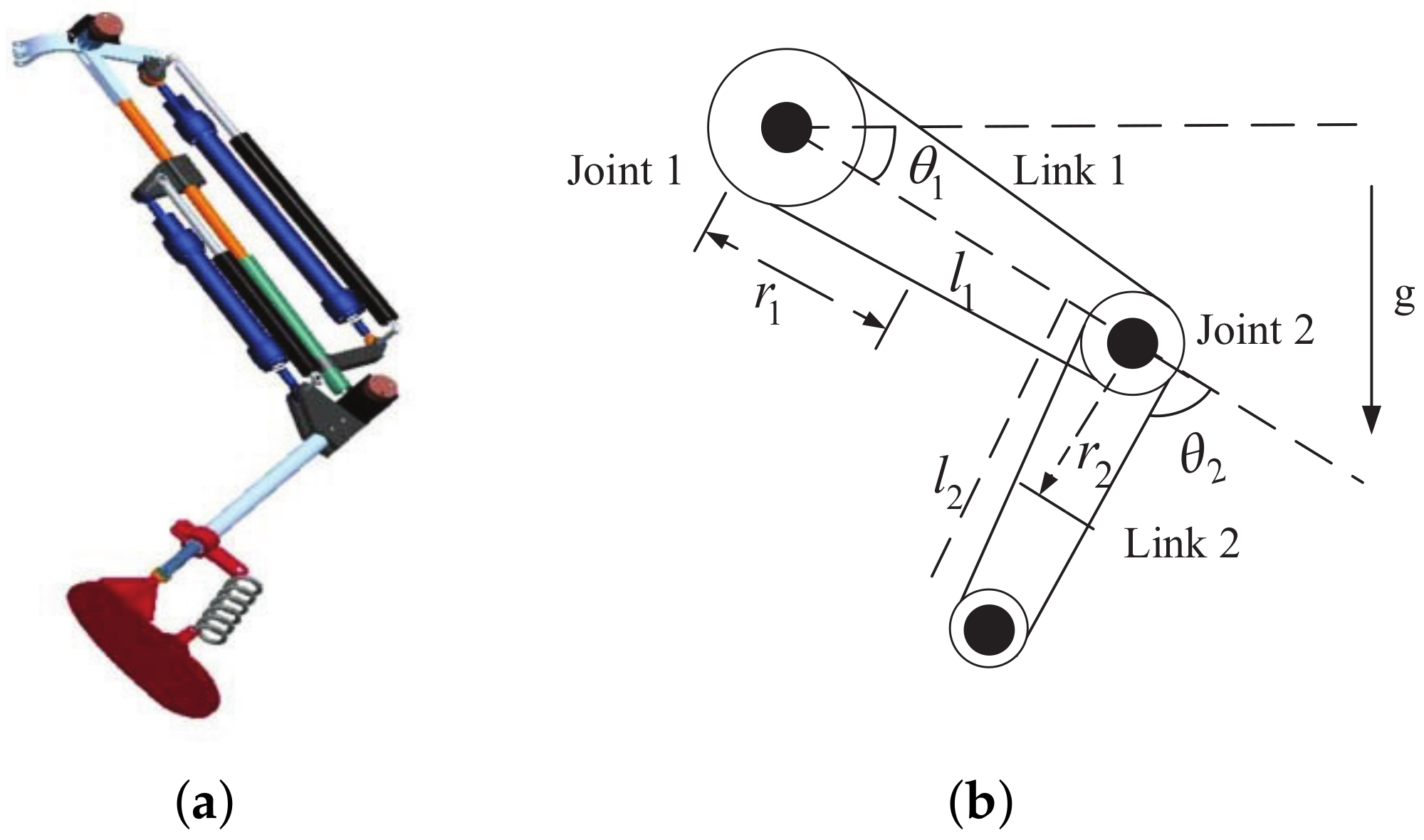
To demonstrate the proposed time-synchronized fault-tolerant control’s superiority, its performance was compared against two state-of-the-art control approaches. Controller 1 is based on neural network and barrier Lyapunov function, controller 2 is based on second-order fast sliding-mode and adaptive method. Numerical simulations were conducted on a two-DOF robotic system, depicted in Figure 1. Each link i in the system is characterized by its moment of inertia , mass , and length . Parameter denotes the distance between link i and its preceding joint , with i being one or two. For the details of the robotic parameters, please refer to Table 1.
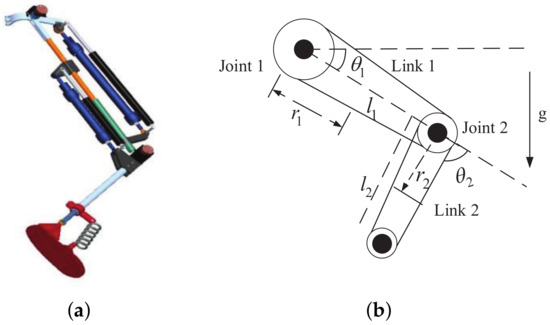
Figure 1.
Model of a knee rehabilitation robotic manipulator. (a) Physical Structure Diagram (b) Description of each variable.

Table 1.
Robotic parameters.
To demonstrate the proposed method’s effectiveness in being fault-tolerant, the following functions were used to simulate faults in the actuator:
which displays that the actuator faults occurred in joint 1 and joint 2 from the time constants of 10 s and 12 s, where joint 1 and joint 2 lose and of their effectiveness, respectively.
External disturbances were set as
The desired trajectory was set as
The initial values of the joint positions were set to . The control parameters were selected as . The parameters of the observer were defined as . The simulation was conducted over a period of seconds.
Remark 7.
The parameters were chosen based on the trial-and-error method, which does not mean that larger values indicate better control performance. On the one hand, it may influence the system’s convergence speed. On the other hand, if the value is set too large, it may cause system divergence. Firstly, the parameters chosen should satisfy the need for system stability, as shown in Equation (39), where , , and Equation (42), where and . Then, in the predefined range, we chose a value according to experience. Based on the control performance and the method of dichotomy, we can determine a suitable group of values.
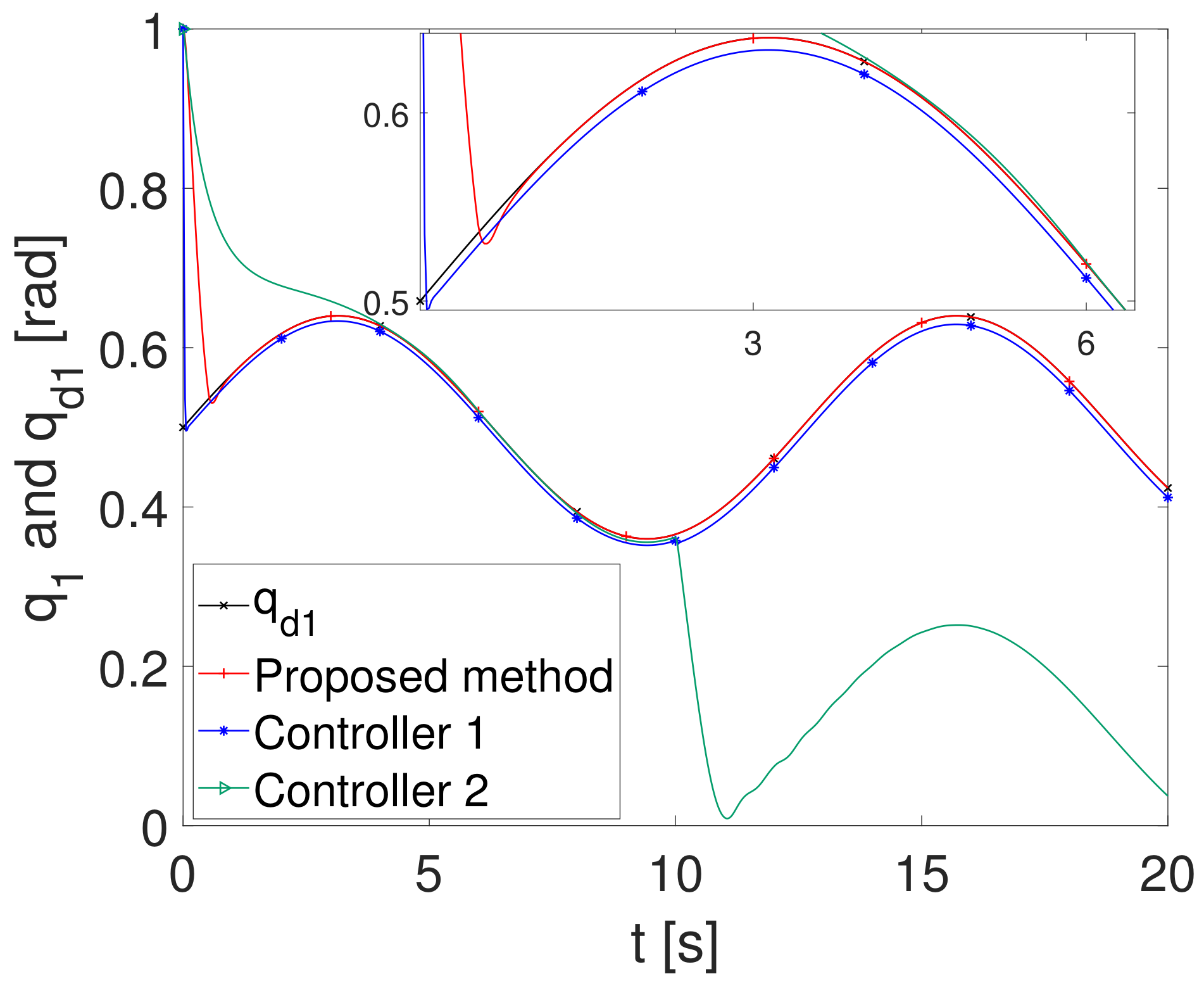
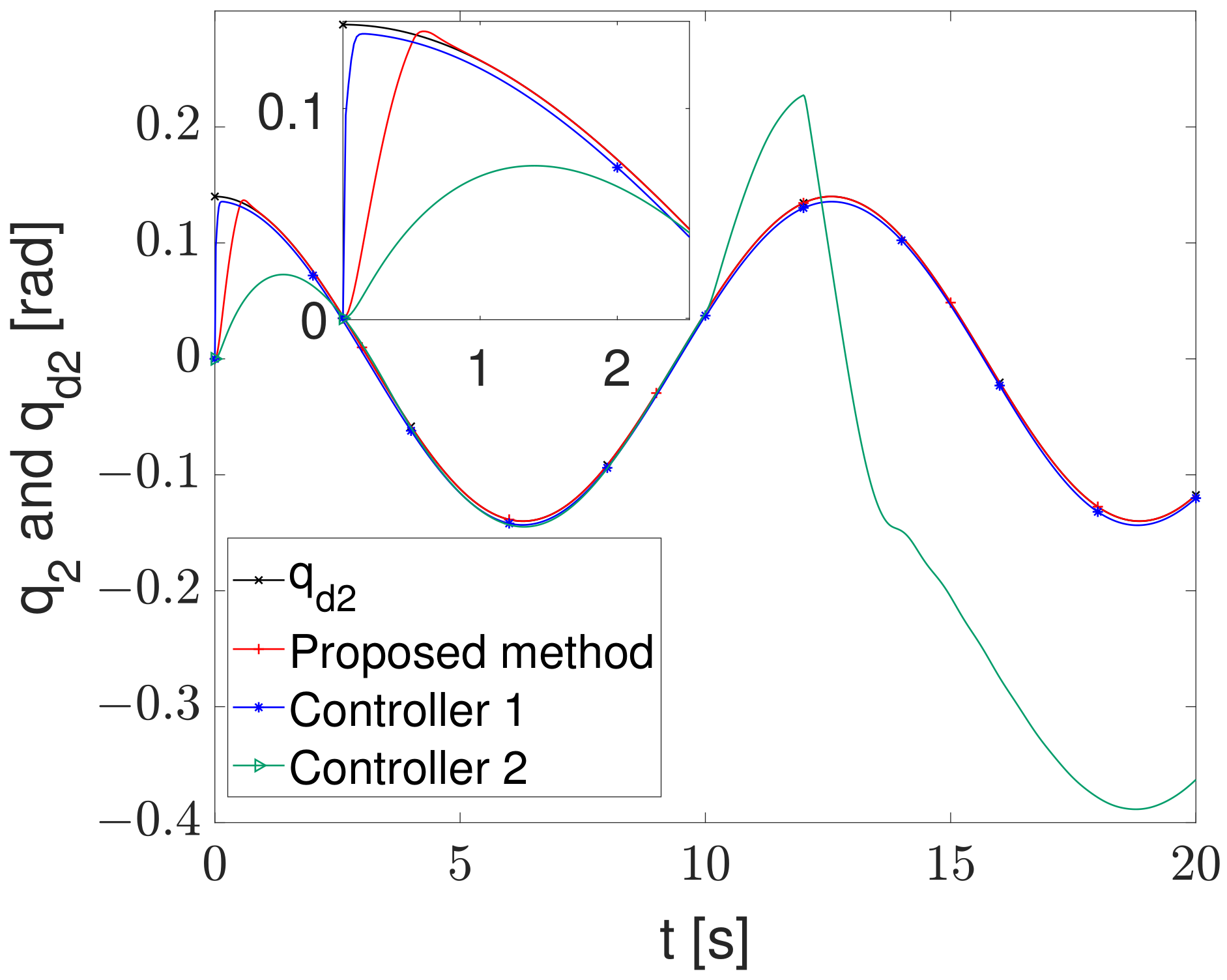
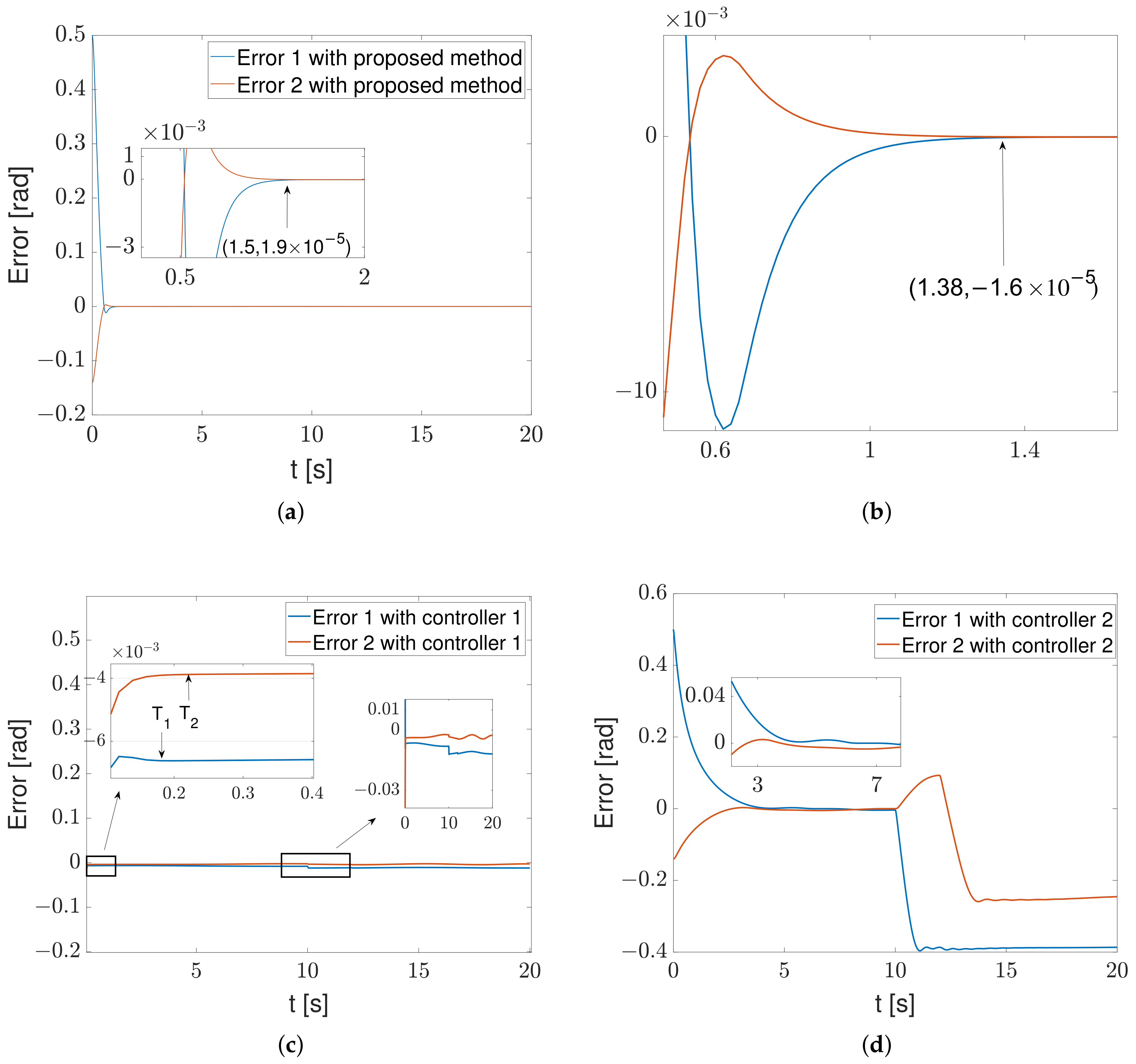
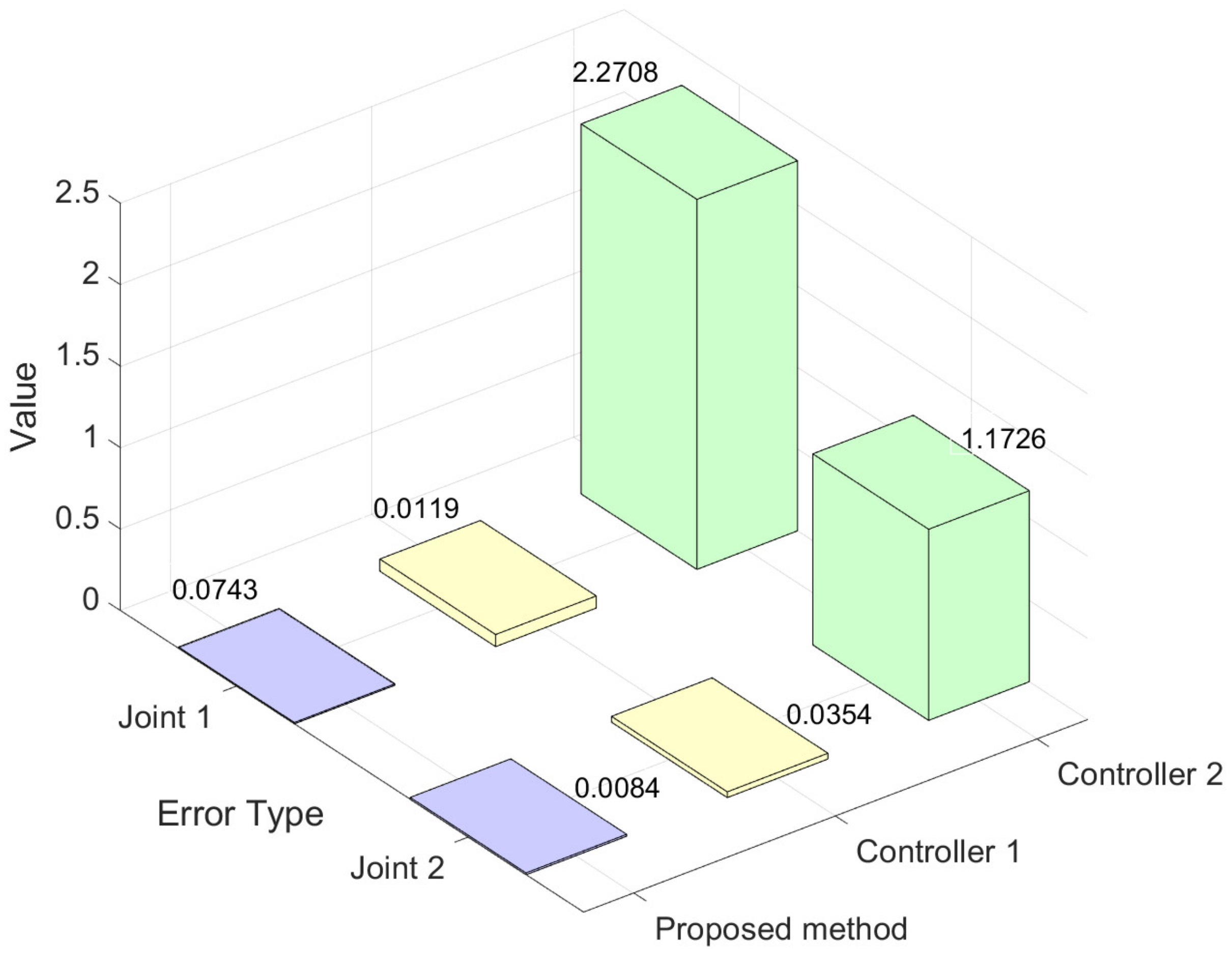
The tracking performance of the three controllers, subjected to system faults and EDSU, is depicted in Figure 2, Figure 3, Figure 4 and Figure 5. Figure 2 and Figure 3 specifically showcase the tracking performances of joints 1 and 2, respectively. Figure 2 shows that while the system is operating normally, e.g., s; without actuator faults, the tracking task can be finished by the three controllers. However, steady errors occur under the effect of controller 1, and the convergence speed is slower for controller 2. This can be attributed to friction and disturbances, which are not effectively mitigated by controllers 1 and 2. Under controller 1, the tracking precision and the converge speed of joint 2 are better than under the other two controllers, as illustrated in Figure 3 and Figure 4; the tracking errors rapidly approach zero. When actuator faults occur ( s and s), the robustness of controllers 1 and 2 is weaker than that of the proposed method, which can be seen in Figure 2, Figure 3 and Figure 4. When there are faults, friction, and disturbances, controller 1, based on an NN and a barrier Lyapunov function, exhibits greater robustness compared to controller 2, which relies on sliding-mode and adaptive methods. It is clearly revealed in Figure 2 and Figure 3 that the control performance of the two joints are abrupt with controller 2 after s and s. Though the robustness of controller 1 is better than that of controller 2, we can see from Figure 4d that the tracking error of joint 1 still becomes larger than for the faults that occurred before, while the proposed method has high robustness against these influences. Furthermore, the salient features of time-synchronized convergence are illustrated in Figure 4a–d. Figure 4a,b show that with the proposed method, which is magnified at , the tracking errors of the two joints converge to zero simultaneously; this obvious characteristic is unique compared to existing control methods such as controller 1 and controller 2, which are shown in Figure 4c,d. Upon the occurrence of faults, the tracking errors remain unchanged with the proposed method, unlike with the other two controllers. This highlights the superior advantages of the proposed time-synchronized fault-tolerant control method, namely ,its higher precision, rapid convergence, and enhanced robustness. In addition, to make a comprehensive comparison, the integrated absolute error of is defined as , which is shown in a 3D bar chart in Figure 5. It shows that the proposed time-synchronized control’s tracking performance is superior to that of controllers 1 and 2. From the simulation results, we can see that under sensor or actuator faults, the time error of the proposed fault-tolerant controller can converge to , which can be used for precision tasks, for example, in aerospace missions.
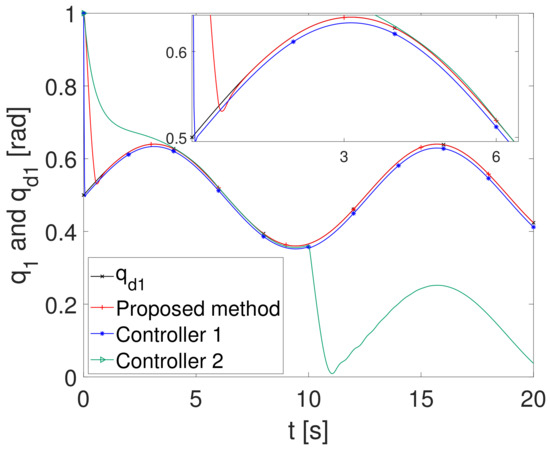
Figure 2.
The tracking performance of joint 1.
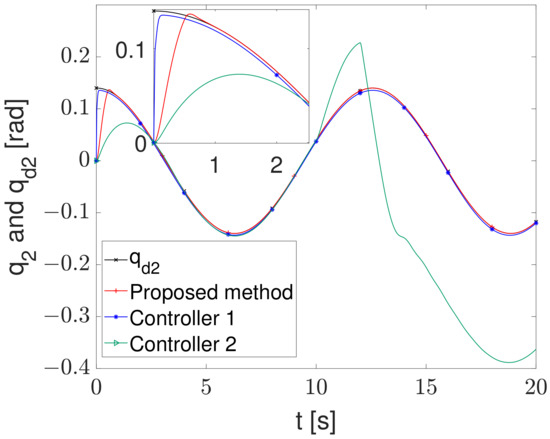
Figure 3.
The tracking performance of joint 2.

Figure 4.
Tracking errors of two joints: (a) time-synchronized convergence curves; (b) enlarged time-synchronized convergence curves; (c) tracking error curves for controller 1; (d) tracking error curves for controller 2.
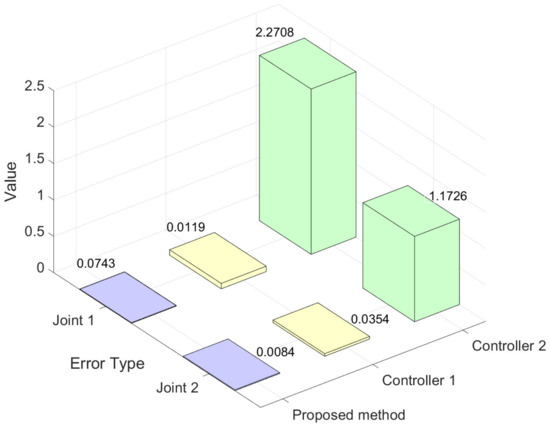
Figure 5.
Three-dimensional bar chart comparing the controllers’ tracking errors.
5. Conclusions
This article introduced a time-synchronized fault-tolerant control method for robotic manipulators, addressing the challenges posed by the time-synchronized convergence problem in the presence of system faults, friction, and external disturbances. The numerical simulations on a two-degree-of-freedom robotic system showed that the tracking errors decreased to , which demonstrated the efficacy of the proposed control approach, offering higher precision, faster convergence, and stronger robustness in contrast to state-of-the-art methods. The proposed control method, highlighted by the tracking errors, converged to zero simultaneously for two joints. These characteristics provide distinct advantages over other existing control methods. Moving forward, this work could be a foundation for more resilient and reliable robotic systems, paving the way for advancements in robotic applications where synchronized temporal performance is crucial.
Author Contributions
Conceptualization, D.W. and G.Z.; methodology, D.W. and R.C.; software, T.Z.; validation, D.W. and R.C.; formal analysis, J.Z.; investigation, D.W.; resources, G.Z.; data curation, T.Z.; writing—original draft preparation, D.W.; writing—review and editing, R.C.; visualization, J.Z.; supervision, G.Z.; project administration, G.Z.; funding acquisition, D.W. and G.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Scientific Research Projects of Universities in Anhui Province under grant No. 2024AH051993; the Startup Fund for Distinguished Scholars of West Anhui University under grant Nos. WGKQ2022050, WGKQ2022006, and WGKQ2022052; and a the Smart Agriculture and Forestry and Smart Equipment Scientific Research and Innovation Team grant, No. 2022AH010091.
Data Availability Statement
All necessary data were described in this manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Xu, Z.; Zhao, L. Distributed adaptive gain-varying finite-time event-triggered control for multiple robot manipulators with disturbances. IEEE Trans. Ind. Inf. 2023, 19, 9302–9313. [Google Scholar] [CrossRef]
- Petrov, P.; Kralov, I. Exponential Trajectory Tracking Control of Nonholonomic Wheeled Mobile Robots. Mathematics 2024, 13, 1. [Google Scholar] [CrossRef]
- Zhang, M.; Tong, W.; Li, P.; Hou, Y.; Xu, X.; Zhu, L. Robust neural dynamics method for redundant robot manipulator control with physical constraints. IEEE Trans. Ind. Inf. 2023, 19, 11721–11729. [Google Scholar] [CrossRef]
- Maiti, R.; Sharma, K.; Sarkar, G. Linear consequence-based fuzzy parallel distributed compensation type l1 adaptive controller for two link robot manipulator. IEEE Trans. Circuits Syst. I Reg. Pap. 2019, 66, 3978–3990. [Google Scholar] [CrossRef]
- Xu, S.; He, B. Robust adaptive fuzzy fault tolerant control of robot manipulators with unknown parameters. IEEE Trans. Fuzzy Syst. 2023, 31, 3081–3092. [Google Scholar] [CrossRef]
- Kang, E.; Qiao, H.; Chen, Z.; Gao, J. Tracking of uncertain robotic manipulators using event-triggered model predictive control with learning terminal cost. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2801–2815. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, Q.; Li, H.; Lu, R. Adaptive prescribed performance control of a flexible-joint robotic manipulator with dynamic uncertainties. IEEE Trans. Cybern. 2021, 52, 12905–12915. [Google Scholar] [CrossRef]
- Saied, H.; Chemori, A.; Bouri, M.; Rafei, M.E.; Francis, C. Feedforward super-twisting sliding mode control for robotic manipulators: Application to pkms. IEEE Trans. Robot 2023, 39, 3167–3184. [Google Scholar] [CrossRef]
- Golestani, M.; Chhabra, R.; Esmaeilzadeh, M. Finite-time nonlinear h-∞ control of robot manipulators with prescribed performance. IEEE Control Syst. Lett. 2023, 7, 1363–1368. [Google Scholar] [CrossRef]
- Zhang, Z.; Yan, Z.; Fu, T. Varying-parameter rnn activated by finite-time functions for solving joint-drift problems of redundant robot manipulators. IEEE Trans. Ind. Inf. 2018, 14, 5359–5367. [Google Scholar] [CrossRef]
- He, W.; Kang, F.; Kong, L.; Feng, Y.; Cheng, G.; Sun, C. Vibration control of a constrained two link flexible robotic manipulator with fixed-time convergence. IEEE Trans. Cybern. 2021, 52, 5973–5983. [Google Scholar] [CrossRef] [PubMed]
- Cao, S.; Sun, L.; Jiang, J.; Zuo, Z. Reinforcement learning-based fixed-time trajectory tracking control for uncertain robotic manipulators with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 4584–4595. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, H.; Tang, D.; Hou, Y.; Wang, Y. Adaptive fixed-time fault-tolerant tracking control and its application for robot manipulators. IEEE Trans. Ind. Electron. 2022, 69, 2956–2966. [Google Scholar] [CrossRef]
- Jin, J.; Chen, W.; Chen, C.; Chen, L.; Tang, Z.; Chen, L.; Wu, L.; Zhu, C. A predefined fixed-time convergence znn and its applications to time-varying quadratic programming solving and dual-arm manipulator cooperative trajectory tracking. IEEE Trans. Ind. Inf. 2023, 19, 8691–8702. [Google Scholar] [CrossRef]
- Yang, P.; Su, Y. Proximate fixed-time prescribed performance tracking control of uncertain robot manipulators. IEEE/ASME Trans. Mechatronics 2022, 27, 3275–3285. [Google Scholar] [CrossRef]
- Van, M.; Sun, Y.; Mcllvanna, S.; Nguyen, M.-N.; Khyam, M.O.; Ceglarek, D. Adaptive fuzzy fault tolerant control for robot manipulators with fixed-time convergence. IEEE Trans. Fuzzy Syst. 2023, 31, 3210–3219. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S. Adaptive fuzzy integral sliding-mode control for robust fault-tolerant control of robot manipulators with disturbance observer. IEEE Trans. Fuzzy Syst. 2021, 29, 1284–1296. [Google Scholar] [CrossRef]
- Li, K.; Li, Y. Adaptive nn optimal consensus fault-tolerant control for stochastic nonlinear multiagent systems. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 947–957. [Google Scholar] [CrossRef]
- Li, D.; Ge, S.S.; Lee, T.H. Simultaneous arrival to origin convergence: Sliding-mode control through the norm-normalized sign function. IEEE Trans. Autom. Control 2022, 67, 1966–1972. [Google Scholar] [CrossRef]
- Yang, Y.; Jiang, H.; Gan, L.; Hua, C.; Li, J. Fixed-time composite neural learning control of flexible telerobotic systems. IEEE Trans. Cybern. 2023, 54, 3602–3614. [Google Scholar] [CrossRef]
- Yu, T.; Cao, J.; Rutkowski, L.; Luo, Y.-P. Finite-time synchronization of complex-valued memristive-based neural networks via hybrid control. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3938–3947. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Qi, F.; Lai, Q.; Iu, H.H. Fixed time synchronization control for bilateral teleoperation mobile manipulator with nonholonomic constraint and time delay. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 3452–3456. [Google Scholar] [CrossRef]
- Guo, S.; Liu, Z.; Yu, J.; Huang, P.; Ma, Z. Adaptive practical fixed-time synchronization control for bilateral teleoperation system with prescribed performance. IEEE Trans. Circuits Syst. II Exp. Briefs 2022, 69, 1243–1247. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.; Lu, R.; Zuo, Z.; Li, X. An overview of finite/fixed-time control and its application in engineering systems. IEEE/CAA J. Autom. Sin. 2022, 9, 2106–2120. [Google Scholar] [CrossRef]
- Ouyang, Y.; Liu, J.; Sun, C. Time-synchronized control for an uncertain marine vessel system with external disturbance. IEEE Trans. Circuits Syst. II Exp. Briefs 2023, 70, 2929–2933. [Google Scholar] [CrossRef]
- Wang, S.; Su, C.; Chang, J.; Dai, H.; Li, J. Scaled p-norm and its application in fast time-synchronized control. IET Control Theory Appl. 2023, 17, 2215–2226. [Google Scholar] [CrossRef]
- Wang, N.; Karimi, H.R.; Li, H.; Su, S. Accurate trajectory tracking of disturbed surface vehicles: A finite-time control approach. IEEE/ASME Trans. Mechatronics 2019, 24, 1064–1074. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).