Abstract
This paper addresses the solvability and controllability of fractional delay differential Sylvester matrix equations with non-permutable coefficient matrices. By applying a vectorization approach and Kronecker product algebra, we transform the matrix-valued problem into an equivalent vector system, enabling the derivation of explicit solution representations using a delayed perturbation of two-parameter Mittag-Leffler-type matrix functions. We establish necessary and sufficient conditions for controllability via a fractional delay Gramian matrix, providing a computationally verifiable criterion that requires no commutativity assumptions. The theoretical results are validated through numerical examples, demonstrating effectiveness in noncommutative scenarios where classical methods fail.
Keywords:
representation of solutions; fractional delay differential Sylvester matrix equation; delayed perturbation matrix function; controllability; Kronecker product; vector operator MSC:
34K37; 93B05; 34K05; 34K07
1. Introduction
Fractional delay differential equations (FDDEs) provide a framework for modeling a broad spectrum of mechanical and technological phenomena. Their applicability extends to numerous scientific and technical disciplines, such as diffusion processes, control theory, and epidemiological and financial modeling; see [1,2,3,4,5,6,7,8] and references therein. These equations naturally arise in systems where hereditary properties and fractional-order dynamics coexist with matrix-valued interactions.
In the realm of fractional delay differential equations, substantial progress has been made in developing solution representations using various techniques, including the method of steps and delayed matrix functions [9,10,11,12,13,14,15]. These developments have facilitated stability analysis, iterative learning control, and relative controllability investigations; see, for example, [9,16,17,18,19].
Parallel to these theoretical advances, control theory for fractional-order systems has found diverse applications spanning vibration control in mechanical systems [20], stability analysis of power networks [21,22], fractional-order epidemic models [23], and robust control design for time-delay systems [24,25,26]. Moreover, while the controllability of Sylvester-type systems has been explored in the absence of delays [27,28,29,30], and for fractional or impulsive variants [31,32,33], recent work by Appa Rao and Prasad [28] studied the controllability and observability of Sylvester matrix dynamical systems on time scales. Sadek et al. [32] discussed the controllability and observability of the fractional differential Sylvester matrix equations in the absence of delays of the form
with and , using the conformable fractional derivative, where is the identity matrix, the operator signifies the Caputo fractional derivative of order and and the lower limit is taken to be zero; is a solution satisfying (1). For every , represents the control input, , , , and are , , , and constant real nonzero matrices, respectively. Cuchta et al. [34] investigated linear quadratic tracking problems. Additional theoretical and application aspects are explored in studies by Zhang et al. [20], Biswal et al. [21], Das and Samanta [23], Bouazza et al. [24], Boudjerida and Seba [25], Fiuzy and Shamaghdari [26], and Singh and Pandey [31]. In 2025, Sadek [33] studied the exact solutions and controllability of (1).
However, despite these advances, the closed-form solutions and controllability analysis of fractional delay differential Sylvester matrix equations with distributed delays and control inputs under non-permutable matrix coefficients remain largely unexplored.
Therefore, this paper bridges this theoretical gap by establishing a comprehensive framework for analyzing the representation of solutions and controllability of the non-homogeneous linear fractional delay differential Sylvester matrix equation (FDDSE) of the form
where the operator signifies the Caputo fractional derivative of order , where , and the lower limit is taken to be zero, is the independent variable, is a positive constant delay, is a solution satisfying (2) for every , represents the control input, , , , , , and are , , , , , and constant real nonzero matrices, respectively, and the initial condition is provided by the continuous matrix function , which is standard and ensures the well-posedness of the delay system by supplying the complete history required for the solution to evolve forward in time .
The presence of delay terms and introduces infinite-dimensional dynamics, rendering classical Kalman-type rank conditions insufficient and necessitating novel functional-analytic or operator-theoretic approaches [35,36,37]. Sylvester-type systems of the form (2) arise naturally in the modeling of coupled and multi-agent systems. For instance, they can describe the dynamics of networks where the state of each agent is a matrix (e.g., a covariance matrix in estimation problems or a stress tensor in continuum mechanics), and the coupling between agents involves both instantaneous () and delayed () interactions. The fractional derivative operator captures sub-diffusive processes or memory effects in the material or network dynamics. The control term allows for actuation that can be applied through specific input channels, making the framework highly relevant for control design in complex, interconnected systems with memory, such as large-scale power grids, multi-robot formations, or chemical reaction networks. Furthermore, the core analytical challenge in solving System (2) stems from its matrix-valued nature and the non-commutativity of its coefficients, which prevents the direct application of standard scalar or vector solution techniques. To overcome this, we employ a vectorization approach coupled with Kronecker product algebra. This methodology is uniquely powerful for several reasons: (i) It systematically transforms the complex matrix-valued differential equation into an equivalent, higher-dimensional vector system, which is structurally simpler to analyze. (ii) The Kronecker product formalism elegantly handles the mixed-multiplication terms (for example, and ) that are intrinsic to the Sylvester structure, converting them into standard linear algebraic operations. (iii) This approach allows us to leverage the well-established theory of fractional delay differential vector equations, enabling the derivation of explicit solution representations without imposing restrictive commutativity conditions on the system matrices, a limitation prevalent in alternative methods.
This paper aims to bridge this theoretical gap by establishing the following:
- (i)
- Explicit representation formulas for the solution of (2) under both permutable and non-permutable assumptions on the coefficient matrices, utilizing a delayed perturbation of a two-parameter Mittag-Leffler-type matrix function adapted to the Sylvester structure, and generalizing and improving the corresponding results in [38].
- (ii)
- Necessary and sufficient conditions for the controllability of (2), formulated in terms of the system matrices , , , , , and , and the delay , without requiring commutativity, generalizing the corresponding results in [33].
- (iii)
- A constructive methodology based on Kronecker product transformations, delayed matrix function expansions, and vectorization techniques, enabling both theoretical analysis and numerical implementation.
- (iv)
- The derived results not only improve and generalize the existing literature on scalar and vector delay systems but also provide foundational tools for the control and stabilization of large-scale matrix dynamical systems arising in multi-agent networks, tensor-based models, and coupled PDE-ODE systems with memory.
To provide a clear and structured overview of the methodological framework developed in this paper, we present a systematic block diagram in Figure 1.
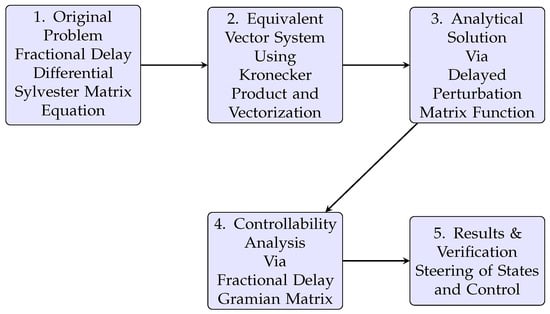
Figure 1.
A schematic overview of the proposed methodology for solving and analyzing the controllability of fractional delay differential Sylvester matrix equations.
2. Preliminaries
In this section, we present some properties and rules for Kronecker products, the definition of the operator, and the basic result related to the delayed perturbation of two-parameter Mittag-Leffler-type matrix function.
Definition 1
([4]). We recall the definition of the two-parameter Mittag-Leffler-type function:
Of particular importance is the case , which reduces to the standard Mittag- Leffler function:
Definition 2
([4]). Let be a function. Its Caputo fractional derivative of order is given as
Definition 3
([39]). Let and ; then the Kronecker product of and written is defined to be the matrix
and is an matrix.
Definition 4
([39]). Let . The vector operator is defined as
Furthermore, we have the following properties of the Kronecker product and vector operator:
- 1.
- ;
- 2.
- ;
- 3.
- .
Definition 5
([15]). Let and be constant real nonzero matrices. We introduce the determining delay matrix equation for of the form
such that
where , 2, …, and , σ, , ….
Definition 6
([15]). The delayed perturbation of a two-parameter Mittag-Leffler-type matrix function is defined as follows
3. Exact Solutions of a Fractional Delay Differential Matrix Equation
In this section, we derive the representation of a solution of problem (2). The following theorem shows an equivalence between the fractional delay differential Sylvester matrix Equation (2) for size and the fractional delay differential system Equation (3) for size .
Theorem 1.
Assume that , , , are non-permutable , , , constant real nonzero matrices, respectively. Let , , and . Then the fractional delay differential Sylvester matrix Equation (2) is equivalent to the system
where , , and is the identity matrix.
Proof.
We apply the operator to the Equation (2), and using the above properties of the Kronecker product, we have
and
This completes the proof. □
Theorem 2.
The unique solution of (3) with the initial condition is
Proof.
The proof of Formula (4) is similar to the proof of Corollary 1 in [15]. □
Corollary 1.
Let , , , be permutable , , , constant real non-zero matrices, respectively. Then the unique solution of (3) with the initial condition is
where
Corollary 2.
Corollary 3.
Remark 1.
Corollary 2 improves and extends the corresponding results in [38] by removing the commutativity assumptions, and adding delay terms.
4. Controllability
In this section, we derive the necessary and sufficient conditions for controllability of the system (3).
Definition 7
Definition 8.
The fractional delay Gramian matrix of system (3) is defined as follows:
where denotes the transpose of the matrix.
Theorem 3.
The system (3) is controllable in if and only if the symmetric controllability matrix is positive definite. In this case, the control
where
defined on transfers , to .
Proof.
(⇒) Assume that is positive definite. Then it is a nonsingular matrix, which guarantees that exists. Then the control defined by (6) exists. Now, substituting (6) into (4) with we have
Hence, (3) is controllable on .
(⇐) Conversely, suppose that (3) is controllable on , then we have to show that is nonsingular. Since is symmetric and positive semidefinite, there exists at least one non-zero arbitrary constant state such that
where denotes the Euclidean norm in , and
which implies that
then
where denotes the -dimensional zero vector. Since (3) is controllable on , there exists a control that drives the initial state to the zero state at . That is,
similarly, there exists a control that drives the initial state to state at . That is,
This leads to , contradicting the fact that z is a nonzero vector. We conclude that is positive definite and, as a result, nonsingular. The proof is complete. □
Remark 2.
Corollary 3 and Theorem 3 extend the corresponding results in [33] by adding the delay terms and .
Remark 3
(Practical Interpretation of the Gramian Condition). The non-singularity of the fractional delay Gramian matrix has a direct physical and control-theoretic interpretation. It guarantees that the control energy required to steer the system between two states is finite. In engineering terms, a non-singular Gramian implies that the control inputs , acting through the input matrix , can excite all possible state directions of the vectorized system over the time interval , despite the presence of fractional damping and delayed coupling. Checking the positivity of provides a verifiable certificate for whether the system is fully controllable, which is a prerequisite for effective stabilization and trajectory tracking in applications.
5. An Example
The following example illustrates the theoretical results.
Example 1.
Consider a control problem involving a fractional delay differential Sylvester matrix equation, given by
where
Then
and
Using Definitions 5 and 6, we compute
and, for , we deduce that
such that
Thus
where
Using Theorem 2, we calculate the explicit solutions of (12), for , as follows:
Following the definition in (5), we now construct the fractional delay Gramian matrix for system (12):
which implies that
and
Therefore, we see that is positive definite. Consequently, given any finite terminal condition for which , the associated control function is given by:
where
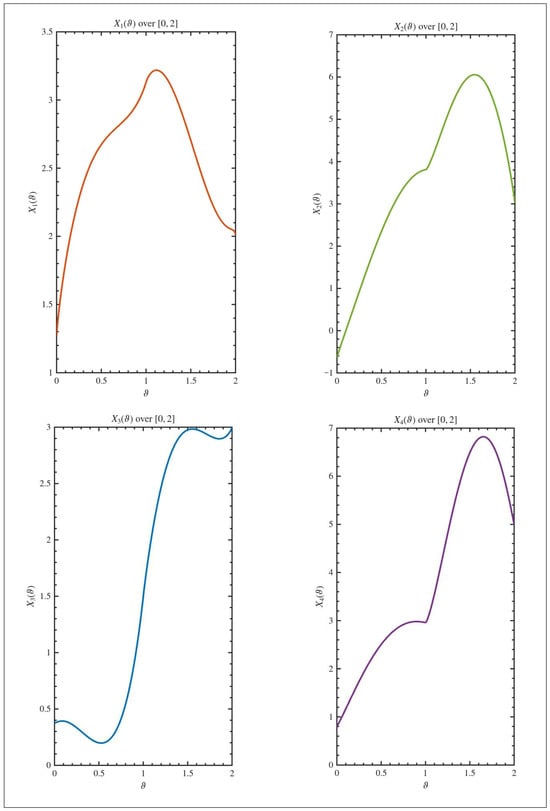
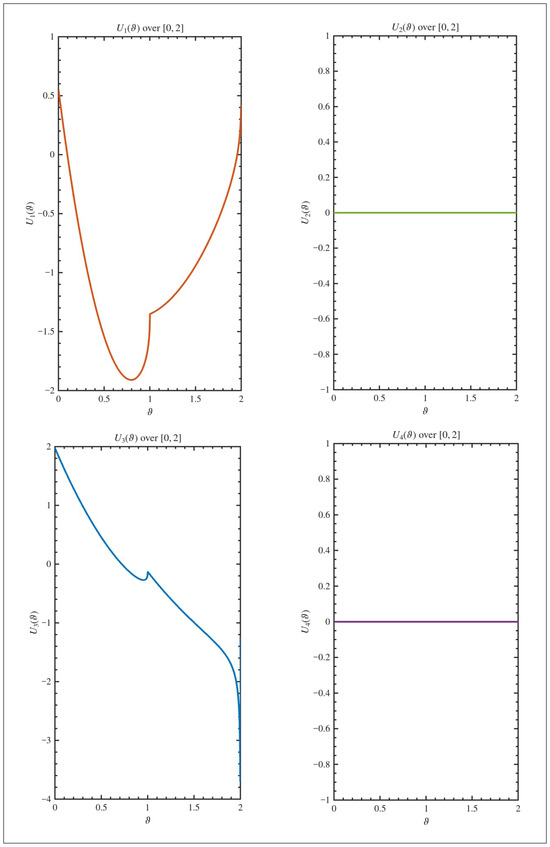
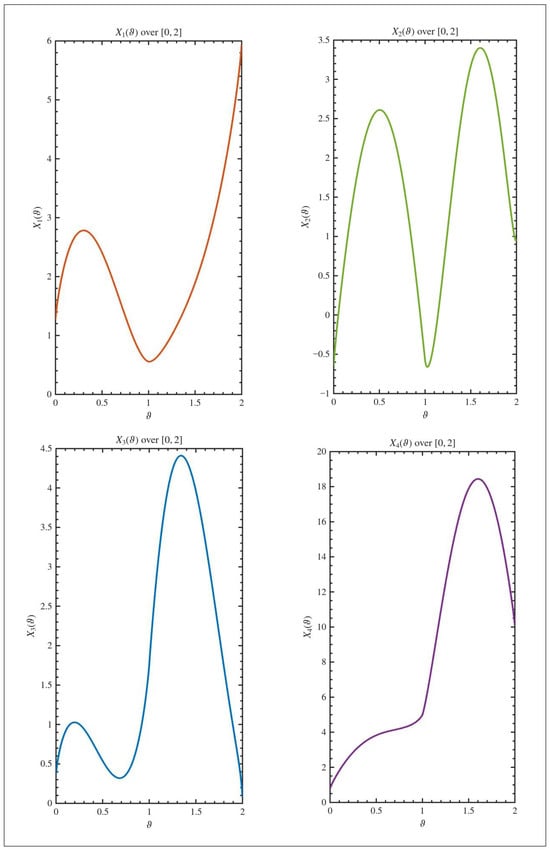
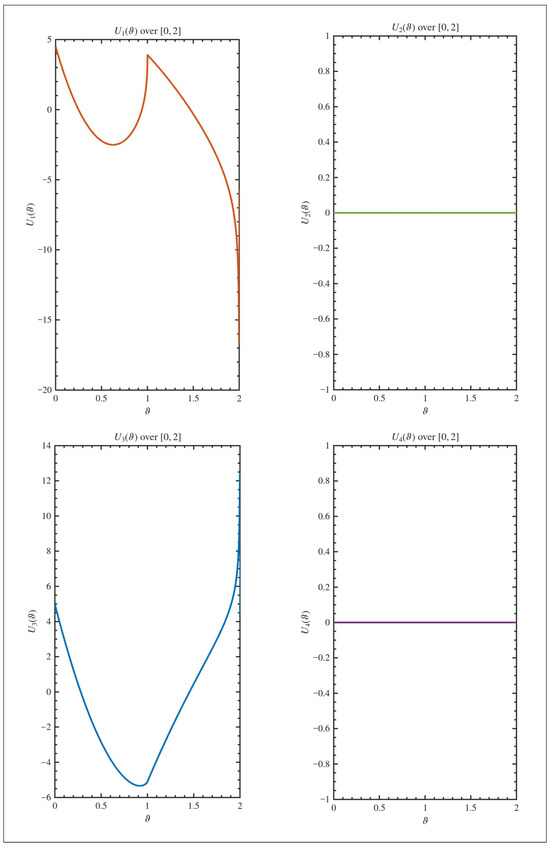
Hence the system (12) is controllable on by Theorem 3. To visualize the system behavior, we plot the state trajectories and control inputs for two different initial conditions. Figure 2 shows the state evolution for the initial vector , while Figure 3 displays the corresponding control functions over the interval . Similarly, Figure 4 illustrates the state for , and Figure 5 shows the associated control inputs. The graphical results in Figure 2, Figure 3, Figure 4 and Figure 5 provide compelling visual validation of our theoretical controllability criteria. Several key practical implications can be observed: (i) Despite significantly different initial conditions ( vs. ), the designed control laws successfully steer both systems to the desired terminal state, demonstrating the robustness of our controllability framework. (ii) The control inputs in Figure 3 and Figure 5 exhibit complex temporal patterns that account for both the fractional-order dynamics and the delay effects, highlighting the non-trivial nature of the control design. (iii) The state trajectories in Figure 2 and Figure 4 show smooth convergence to the target, confirming that the fractional delay Gramian-based control strategy effectively compensates for the system’s memory effects and delayed interactions. This comparative analysis underscores the practical utility of our approach for engineering applications where systems must be controlled from arbitrary initial states to desired configurations despite inherent delays and fractional-order dynamics.
Figure 2.
The trajectory of the state of system (12) in the interval when .
Figure 3.
The trajectory of the control functions , , , for when .
Figure 4.
The trajectory of the state of system (12) in the interval when .
Figure 5.
The trajectory of the control functions , , , for when .
Remark 4.
It is seen that, when , the conclusion of Theorem 5 in [38] is not applicable to the system (12) because our results impose minimal restrictions on the coefficient matrices: they are not required to commute. Therefore, our results improve some existing ones.
6. Conclusions
This study has successfully developed a comprehensive theoretical framework for analyzing fractional delay differential Sylvester matrix equations with non-permutable coefficient matrices. The principal contribution lies in establishing explicit solution representations through the innovative application of vectorization techniques and Kronecker product algebra, which effectively transform the original matrix-valued problem into a tractable vector system. The derived solutions, expressed in terms of delayed perturbations of two-parameter Mittag-Leffler-type matrix functions, generalize and improve existing results by eliminating restrictive commutativity assumptions.
A significant advancement presented in this work is the introduction of a fractional delay Gramian matrix, which provides the necessary and sufficient conditions for complete controllability. This criterion remains computationally verifiable even when system matrices do not commute, addressing a critical gap in the literature. The numerical example demonstrates the practical efficacy of our approach, confirming that both solution representation and controllability analysis remain robust in non-commutative and delay-rich environments where conventional methods are inapplicable.
Future research directions will focus on extending this framework to incorporate nonlinear perturbations, stochastic disturbances, and state-dependent delays under non-permutable matrix structures. Furthermore, development of efficient numerical schemes, such as Krylov subspace methods [41,42], for computing the delayed Mittag-Leffler functions and the Gramian matrix, is essential for applying this framework to large-scale engineering problems.
Author Contributions
Conceptualization, A.M.E.; Data curation, A.M.E. and F.M.; Formal analysis, A.M.E.; Software, A.M.E.; Supervision, A.M.E.; Validation, A.M.E. and F.M.; Visualization, A.M.E. and F.M.; Writing—original draft, A.M.E.; Writing—review and editing, A.M.E. and F.M.; Investigation, A.M.E.; Methodology, A.M.E. and F.M.; Funding acquisition, F.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Deanship of Scientific Research Libraries in Princess Nourah bint Abdulrahman University through the Program for Supporting Publication in Top-Impact Journals, Grant No. (SPTIF-2025-9).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Acknowledgments
The authors extend their appreciation to the Deanship of Scientific Research Libraries in Princess Nourah bint Abdulrahman University for funding this research work through the Program for Supporting Publication in Top-Impact Journals, Grant No. (SPTIF-2025-9).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Coimbra, C.F.M. Mechanics with variable-order differential operators. Ann. Phys. 2003, 12, 692–703. [Google Scholar] [CrossRef]
- Diethelm, K. The Analysis of Fractional Differential Equations; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Heymans, N.; Podlubny, I. Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheol. Acta 2006, 45, 765–771. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science BV: Amsterdam, The Netherlands, 2006. [Google Scholar] [CrossRef]
- Obembe, A.D.; Hossain, M.E.; Abu-Khamsin, S.A. Variable-order derivative time fractional diffusion model for heterogeneous porous media. J. Pet. Sci. Eng. 2017, 152, 391–405. [Google Scholar] [CrossRef]
- Sweilam, N.H.; Al-Mekhlafi, S.M. Numerical study for multi-strain tuberculosis (TB) model of variable-order fractional derivatives. J. Adv. Res. 2016, 7, 271–283. [Google Scholar] [CrossRef] [PubMed]
- Tarasov, V. Handbook of Fractional Calculus with Applications: Applications in Physics, Part A; De Gruyter: Berlin, Germany, 2019. [Google Scholar] [CrossRef]
- Garg, T.; Rakshit, M.; Manivel, M.; Shyamsunder. Modeling of Hepatitis B Virus Transmission with Vaccination, Treatment, and Memory Effects. Adv. Theory Simul. 2025, 7, e01358. [Google Scholar] [CrossRef]
- Elshenhab, A.M.; Wang, X.T.; Hosny, M. Explicit solutions and finite-time stability for fractional delay systems. Appl. Math. Comput. 2025, 498, 129388. [Google Scholar] [CrossRef]
- Khusainov, D.Y.; Diblík, J.; Růžičková, M.; Lukáčová, J. A representation of the solution of the Cauchy problem for an oscillatory system with pure delay. Nonlinear Oscil. 2008, 11, 276–285. [Google Scholar] [CrossRef]
- Khusainov, D.Y.; Shuklin, G.V. Linear autonomous time-delay system with permutation matrices solving. Math. Ser. 2003, 17, 101–108. [Google Scholar]
- Mahmudov, N.I. A novel fractional delayed matrix cosine and sine. Appl. Math. Lett. 2019, 92, 41–48. [Google Scholar] [CrossRef]
- Elshenhab, A.M.; Wang, X.T. Representation of solutions for linear fractional systems with pure delay and multiple delays. Math. Methods Appl. Sci. 2021, 44, 12835–12850. [Google Scholar] [CrossRef]
- Mahmudov, N.I. Multi-delayed perturbation of Mittag-Leffler type matrix functions. J. Math. Anal. Appl. 2022, 505, 125589. [Google Scholar] [CrossRef]
- Mahmudov, N.I. Delayed perturbation of Mittag-Leffler functions and their applications to fractional linear delay differential equations. Math. Methods Appl. Sci. 2019, 42, 5489–5497. [Google Scholar] [CrossRef]
- Lakshmi Priya, P.K.; Kaliraj, K. A study on the finite time stability and controllability of time delay fractional model. Arab. J. Math. 2025, 14, 155–170. [Google Scholar] [CrossRef]
- Almarri, B.; Wang, X.; Elshenhab, A.M. Controllability and Hyers–Ulam stability of fractional systems with pure delay. Fractal Fract. 2022, 6, 611. [Google Scholar] [CrossRef]
- Aydin, M.; Mahmudov, N.I. Iterative learning control for impulsive fractional order time-delay systems with nonpermutable constant coefficient matrices. Int. J. Adapt. Control Signal Process. 2022, 36, 1419–1438. [Google Scholar] [CrossRef]
- Aydin, M.; Mahmudov, N.I. On a study for the neutral Caputo fractional multi-delayed differential equations with noncommutative coefficient matrices. Chaos Solitons Fractals 2022, 161, 112372. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, X.; Xiong, F.-R.; Liu, L.; Zhang, S. Active vibration control of typical piping system of a nuclear power plant based on fractional PI controller. Int. J. Dyn. Control 2022, 10, 2111–2123. [Google Scholar] [CrossRef]
- Biswal, S.S.; Swain, D.R.; Rout, P.K. Inter-area and intra-area oscillation damping for UPFC in a multi-machine power system based on tuned fractional PI controllers. Int. J. Dyn. Control 2022, 10, 1594–1612. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, Z.Y.; Wu, Z. Cluster synchronization of fractional-order directed networks via intermittent pinning control. Phys. A 2019, 519, 22–33. [Google Scholar] [CrossRef]
- Das, M.; Samanta, G. Optimal control of a fractional order epidemic model with carriers. Int. J. Dyn. Control 2022, 10, 598–619. [Google Scholar] [CrossRef]
- Bouazza, L.; Mourillon, B.; Makhlouf, A.; Birouche, A. Controllability and observability of formal perturbed linear time invariant systems. Int. J. Dyn. Control 2021, 9, 1444–1455. [Google Scholar] [CrossRef]
- Boudjerida, A.; Seba, D. Controllability of nonlocal Hilfer fractional delay dynamic inclusions with non-instantaneous impulses and non-dense domain. Int. J. Dyn. Control 2022, 10, 1613–1625. [Google Scholar] [CrossRef]
- Fiuzy, M.; Shamaghdari, S. Stability analysis of fractional-order linear system with PID controller in the output feedback structure subject to input saturation. Int. J. Dyn. Control 2022, 10, 511–524. [Google Scholar] [CrossRef]
- Murty, M.; Appa, R.B.; Suresh, K.G. Controllability, observability, and realizability of matrix Lyapunov systems. Bull. Korean Math. Soc. 2006, 43, 149–159. [Google Scholar] [CrossRef]
- Appa Rao, B.V.; Prasad, K.A.S.N.Y. Controllability and observability of Sylvester matrix dynamical systems on time scales. Kyungpook Math. J. 2016, 56, 529–539. [Google Scholar] [CrossRef]
- Dubey, B.; George, R.K. Controllability of semilinear matrix Lyapunov systems. Electron. J. Differ. Equ. 2013, 2013, 1–12. Available online: http://ejde.math.txstate.edu (accessed on 9 November 2025).
- Dubey, B.; George, R.K. Controllability of impulsive matrix Lyapunov systems. Appl. Math. Comput. 2015, 254, 327–339. [Google Scholar] [CrossRef]
- Singh, V.; Pandey, D.N. Controllability of fractional impulsive quasilinear differential systems with state dependent delay. Int. J. Dyn. Control 2019, 7, 313–325. [Google Scholar] [CrossRef]
- Sadek, L.; Abouzaid, B.; Sadek, E.M.; Alaoui, H.T. Controllability, observability and fractional linear-quadratic problem for fractional linear systems with conformable fractional derivatives and some applications. Int. J. Dyn. Control 2023, 11, 214–228. [Google Scholar] [CrossRef]
- Sadek, L. Control theory for fractional differential Sylvester matrix equations with Caputo fractional derivative. J. Vib. Control 2025, 31, 1586–1602. [Google Scholar] [CrossRef]
- Cuchta, T.; Poulsen, D.; Wintz, N. Linear quadratic tracking with continuous conformable derivatives. Eur. J. Control 2023, 72, 100808. [Google Scholar] [CrossRef]
- Corless, M.J.; Frazho, A.E. Linear Systems and Control: An Operator Perspective; Marcel Dekker: New York, NY, USA, 2003; Available online: http://ndl.ethernet.edu.et/bitstream/123456789/32303/1/91.pdf (accessed on 9 November 2025).
- Hale, J.K.; Verduyn Lunel, S.M. Introduction to Functional-Differential Equations; Springer: New York, NY, USA, 1993; Volume 99. [Google Scholar] [CrossRef]
- Kolmanovskii, V.; Myshkis, A. Introduction to the Theory and Applications of Functional Differential Equations; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1999. [Google Scholar] [CrossRef]
- Diblík, J. Representation of solutions to a linear matrix first-order differential equation with delay. Bull. Math. Sci. 2025, 1–13. [Google Scholar] [CrossRef]
- Graham, A. Kronecker Products and Matrix Calculus with Applications; Ellis Horwood Ltd.: Chichester, UK, 1981; Available online: https://pdfcoffee.com/alexander-graham-kronecker-products-and-matrix-calculus-with-applications-pdf-free.html (accessed on 9 November 2025).
- Wang, J.; Luo, Z.; Fečkan, M. Relative controllability of semilinear delay differential systems with linear parts defined by permutable matrices. Eur. J. Control 2017, 38, 39–46. [Google Scholar] [CrossRef]
- Hached, M.; Jbilou, K. Computational Krylov-based methods for large-scale differential Sylvester matrix problems. Numer. Linear Algebra Appl. 2018, 25, e2187. [Google Scholar] [CrossRef]
- Sadek, E.M.; Bentbib, A.H.; Sadek, L.; Talibi Alaoui, H. Global extended Krylov subspace methods for large-scale differential Sylvester matrix equations. J. Appl. Math. Comput. 2020, 62, 157–177. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).