
Robust Discontinuity Indicators for High-Order Reconstruction of Piecewise Smooth Functions



Abstract
1. Introduction
2. Background and Preliminaries
2.1. Related Work
2.2. Weighted-Least-Squares Approximations
2.3. Weighted Averaging of Local Fittings
3. Cell-Based Indicators
3.1. Asymptotic Bounds in Smooth Regions
3.2. Asymptotic Bounds near Discontinuities
3.3. Generalization to Smooth Surfaces in
3.4. Precomputing Operator for Cell-Based Overshoot–Undershoot Indicators
3.4.1. Overshoot–Undershoot Indicators
3.4.2. Cell-Based Threshold
4. Node-Based Oscillation Indicators
4.1. Definition of Oscillation Indicator
- Near discontinuities: The values tend to oscillate in sign. For example, if alternates between and for cells around v, then . The numerator becomes . The denominator becomes . In this simplified view, would be large. With the safeguard , the denominator becomes . Thus, , which is large if is small.
- Near local extrema (smooth regions): The values tend to have consistent signs (e.g., all negative for a minimum, see Appendix A) and similar magnitudes. Thus, for all . The numerator becomes very small. The denominator remains relatively large. Hence, tends to be small.
4.2. Area Weights for Nonuniform Meshes
4.3. Generalization to Surfaces with Geometric Discontinuities
4.4. Summary of Algorithm
- Computation of cell-based OSUS indicators for all cells .
- Calculation of node-based oscillation indicators for all vertices v.
- Determination of node-based discontinuity markers using a dual-thresholding strategy involving both and .
| Algorithm 1 Robust Discontinuity Indicators (RDI) |
| Require: A surface mesh (vertices V, cells E), the precomputed OSUS operator for , function values at all nodes , node-based thresholds for and discontinuities (), cell-based threshold parameters . Ensure: A vector of integer markers for all nodes ().
|
- Line 1: . Sparse matrix-vector multiplication. If has non-zeros, complexity is . Assuming (average non-zeros per row is constant), this is .
- Lines 3–11 (Cell-based pre-filtering): Loop over M cells. Inside, computations are per cell (assuming stencil size is for ). Total .
- Lines 13–25 (Node-based indicators): Loop over N vertices. Let be the number of vertices with . Inside the loop for marked vertices: compute and . This involves summing over cells incident to v. If average vertex valence is ( for typical meshes), this is per marked node. Total . In the worst case, , so .
5. Numerical Results
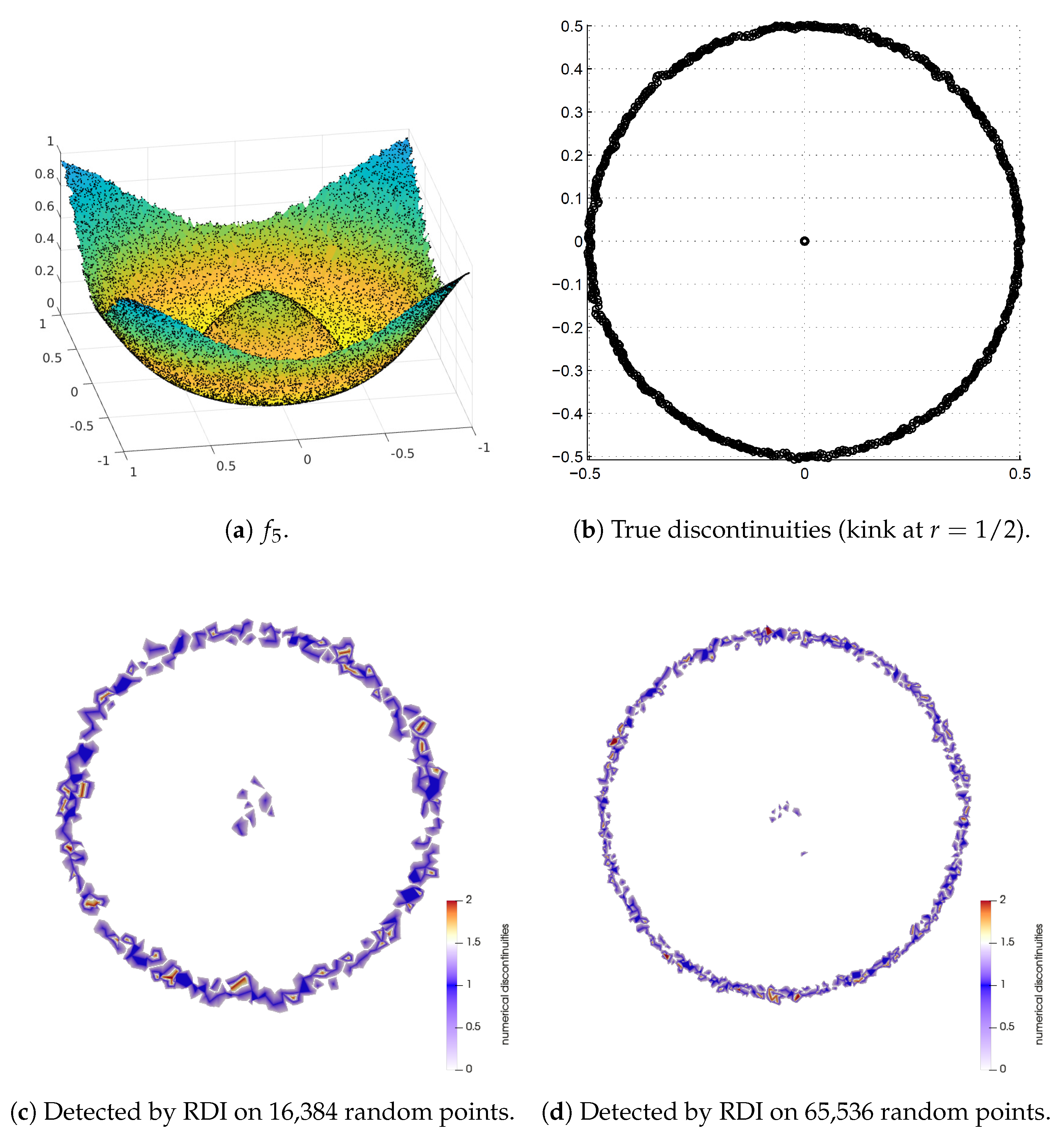
5.1. Experimentation on Unit Spheres with Nonuniform Neshes
5.2. Comparison with Polynomial Annihilation Edge Detection
5.3. Generalization to Surfaces with Sharp Features
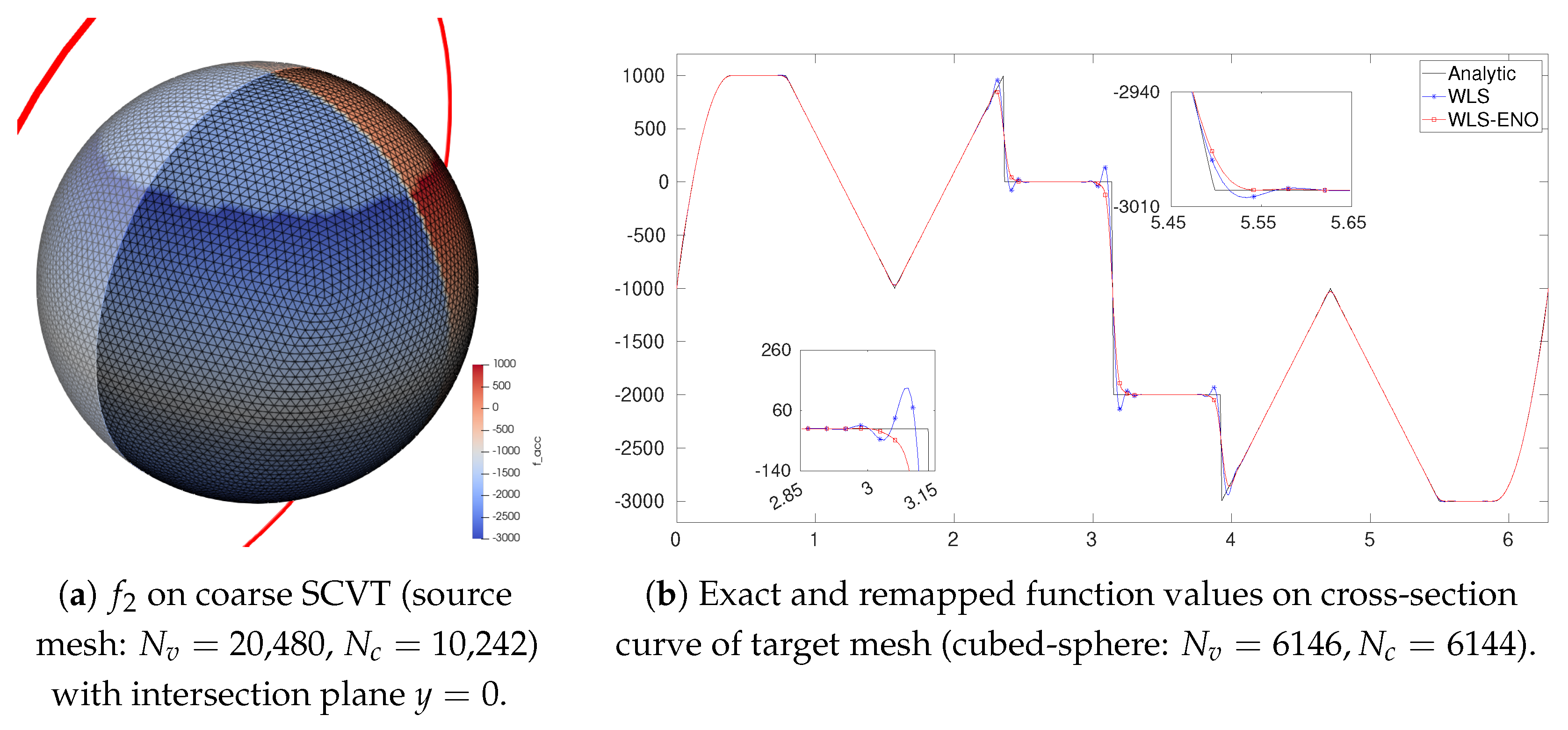
5.4. Application to Remap
6. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Oscillatory Properties of Alpha_Sigma near Local Extremes
Appendix B. The Effect of Virtual Splitting Along Sharp Features


References
- Hesthaven, J.S.; Warburton, T. Nodal Discontinuous Galerkin Methods; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Botsch, M.; Kobbelt, L.; Pauly, M.; Alliez, P.; Lévy, B. Polygon Mesh Processing; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- LeVeque, R.J. Finite Volume Methods for Hyperbolic Problems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Gottlieb, D.; Shu, C.W. On the Gibbs phenomenon and its resolution. SIAM Rev. 1997, 39, 644–668. [Google Scholar] [CrossRef]
- Shu, C.W. High order ENO and WENO schemes for computational fluid dynamics. In High-Order Methods for Computational Physics; Springer: Berlin/Heidelberg, Germany, 1999; pp. 439–582. [Google Scholar]
- Liu, X.D.; Osher, S.; Chan, T. Weighted essentially non-oscillatory schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef]
- Dieci, L.; Guglielmi, N. Regularizing Piecewise Smooth Differential Systems: Co-Dimension Discontinuity Surface. J. Dyn. Differ. Equ. 2013, 25, 71–94. [Google Scholar] [CrossRef]
- Lopez, L.; Maset, S. Numerical event location techniques in discontinuous differential algebraic equations. Appl. Numer. Math. 2022, 178, 98–122. [Google Scholar] [CrossRef]
- Harten, A. ENO schemes with subcell resolution. J. Comput. Phys. 1989, 83, 148–184. [Google Scholar] [CrossRef]
- Jiang, G.S.; Peng, D. Weighted ENO Schemes for Hamilton–Jacobi Equations. SIAM J. Sci. Comput. 2000, 21, 2126–2143. [Google Scholar] [CrossRef]
- Amat, S.; Ruiz, J. New WENO Smoothness Indicators Computationally Efficient in the Presence of Corner Discontinuities. J. Sci. Comput. 2017, 71, 1265–1302. [Google Scholar] [CrossRef]
- Liu, H.; Jiao, X. WLS-ENO: Weighted-least-squares based essentially non-oscillatory schemes for finite volume methods on unstructured meshes. J. Comput. Phys. 2016, 314, 749–773. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Q.; Wang, X.; Jiao, X. WLS-ENO remap: Superconvergent and non-oscillatory weighted least squares data transfer on surfaces. J. Comput. Phys. 2020, 417, 109578. [Google Scholar] [CrossRef]
- Tadmor, E. Filters, mollifiers and the computation of the Gibbs phenomenon. Acta Numer. 2007, 16, 305–378. [Google Scholar] [CrossRef]
- Cates, D.; Gelb, A. Detecting derivative discontinuity locations in piecewise continuous functions from Fourier spectral data. Numer. Algo. 2007, 46, 59–84. [Google Scholar] [CrossRef]
- Hewitt, E.; Hewitt, R.E. The Gibbs-Wilbraham phenomenon: An episode in Fourier analysis. Arch. Hist. Exact Sci. 1979, 21, 129–160. [Google Scholar] [CrossRef]
- Bozzini, M.; Rossini, M. The detection and recovery of discontinuity curves from scattered data. J. Comput. Appl. Math. 2013, 240, 148–162. [Google Scholar] [CrossRef]
- de Silanes, M.C.L.; Parra, M.C.; Torrens, J.J. Vertical and oblique fault detection in explicit surfaces. J. Comput. Appl. Math. 2002, 140, 559–585. [Google Scholar] [CrossRef]
- Moura, R.C.; Cassinelli, A.; da Silva, A.F.; Burman, E.; Sherwin, S.J. Gradient jump penalty stabilisation of spectral/hp element discretisation for under-resolved turbulence simulations. Comput. Methods Appl. Mech. Eng. 2022, 388, 114200. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, X.; Ray, N.; Jiao, X. Compact feature-aware Hermite-style high-order surface reconstruction. Engrg. Comput. 2021, 37, 187–210. [Google Scholar] [CrossRef]
- Shrivakshan, G.T. A comparison of various edge detection techniques used in image processing. Int. J. Comput. Sci. Issues 2012, 9, 269. [Google Scholar]
- Archibald, R.; Gelb, A.; Yoon, J. Polynomial fitting for edge detection in irregularly sampled signals and images. SIAM J. Numer. Ana. 2005, 43, 259–279. [Google Scholar] [CrossRef]
- Saxena, R.; Gelb, A.; Mittelmann, H. A high order method for determining the edges in the gradient of a function. Comm. Comput. Phys. 2009, 5, 694–711. [Google Scholar]
- Archibald, R.; Gelb, A.; Yoon, J. Determining the locations and discontinuities in the derivatives of functions. Appl. Numer. Math. 2008, 58, 577–592. [Google Scholar] [CrossRef]
- Glaubitz, J.; Gelb, A. High Order Edge Sensors with ℓ1 Regularization for Enhanced Discontinuous Galerkin Methods. SIAM J. Sci. Comput. 2019, 41, A1304–A1330. [Google Scholar] [CrossRef]
- Marr, D.; Hildreth, E. Theory of edge detection. Proc. Roy. Soc. Lond. 1980, 207, 187–217. [Google Scholar]
- Marr, D. Early processing of visual information. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1976, 275, 483–519. [Google Scholar]
- Marr, D.; Ullman, S.; Poggio, T. Bandpass channels, zero-crossings, and early visual information processing. J. Opt. Soc. Am. 1979, 69, 914–916. [Google Scholar] [CrossRef]
- Mallat, S.; Hwang, W.L. Singularity detection and processing with wavelets. IEEE Trans. Inf. Theory 1992, 38, 617–643. [Google Scholar] [CrossRef]
- Rossini, M. Interpolating functions with gradient discontinuities via Variably Scaled Kernels. Dolomites Res. Notes Approx. 2018, 11, 3–14. [Google Scholar]
- De Marchi, S.; Marchetti, F.; Perracchione, E.; Poggiali, D. Polynomial interpolation via mapped bases without resampling. J. Comput. Appl. Math. 2020, 364, 112347. [Google Scholar] [CrossRef]
- Gelb, A.; Tadmor, E. Detection of edges in spectral data. Appl. Comput. Harmon. Anal. 1999, 7, 101–135. [Google Scholar] [CrossRef]
- Gelb, A.; Tadmor, E. Detection of edges in spectral data II. Nonlinear enhancement. SIAM J. Numer. Anal. 2000, 38, 1389–1408. [Google Scholar] [CrossRef]
- Jiao, X.; Zha, H. Consistent computation of first- and second-order differential quantities for surface meshes. In Proceedings of the ACM Solid and Physical Modeling Symposium, Stony Brook, NY, USA, 2–4 June 2008; pp. 159–170. [Google Scholar]
- Buhmann, M.D. Radial Basis Functions: Theory and Implementations; Cambridge University Press: Cambridge, UK, 2003; Volume 12. [Google Scholar]
- Hu, C.; Shu, C.W. Weighted essentially non-oscillatory schemes on triangular meshes. J. Comput. Phys. 1999, 150, 97–127. [Google Scholar] [CrossRef]
- Shi, J.; Hu, C.; Shu, C.W. A technique of treating negative weights in WENO schemes. J. Comput. Phys. 2002, 175, 108–127. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, Y.; Du, H.; Lin, G.; Shu, C.W. Point-wise hierarchical reconstruction for discontinuous Galerkin and finite volume methods for solving conservation laws. J. Comput. Phys. 2011, 230, 6843–6865. [Google Scholar] [CrossRef]
- Zhang, Y.T.; Shu, C.W. Third order WENO scheme on three dimensional tetrahedral meshes. Comm. Comput. Phys. 2009, 5, 836–848. [Google Scholar]
- Liu, Y.; Zhang, Y.T. A robust reconstruction for unstructured WENO schemes. J. Sci. Comput. 2013, 54, 603–621. [Google Scholar] [CrossRef]
- Jiao, X.; Wang, D. Reconstructing high-order surfaces for meshing. Engrg. Comput. 2012, 28, 361–373. [Google Scholar] [CrossRef]
- Ray, N.; Wang, D.; Jiao, X.; Glimm, J. High-Order Numerical Integration over Discrete Surfaces. SIAM J. Numer. Anal. 2012, 50, 3061–3083. [Google Scholar] [CrossRef]
- Buhmann, M. A new class of radial basis functions with compact support. Math. Comput. 2001, 70, 307–318. [Google Scholar] [CrossRef]
- Dyedov, V.; Ray, N.; Einstein, D.; Jiao, X.; Tautges, T. AHF: Array-Based Half-Facet Data Structure for Mixed-Dimensional and Non-manifold Meshes. In Proceedings of the 22nd International Meshing Roundtable, Orlando, FL, USA, 13–16 October 2013; Sarrate, J., Staten, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 445–464. [Google Scholar]
- Li, Y.; Jiao, X. Mesh used for Robust Discontinuity Indicators workflows. arXiv 2024, arXiv:2308.02235. [Google Scholar]
- Ju, L.; Ringler, T.; Gunzburger, M. Voronoi tessellations and their application to climate and global modeling. In Numerical Techniques for Global Atmospheric Models; Springer: Berlin/Heidelberg, Germany, 2011; pp. 313–342. [Google Scholar]
- Roe, P.L.; Baines, M.J. Algorithms for advection and shock problems. In Proceedings of the 4th Conference on Numerical Methods in Fluid Mechanics, Paris, France, 7–9 October 1981; pp. 281–290, Conference held in 1981, proceedings published in 1982. [Google Scholar]
- Gelb, A.; Tadmor, E. Adaptive edge detectors for piecewise smooth data based on the minmod limiter. J. Sci. Comput. 2006, 28, 279–306. [Google Scholar] [CrossRef]
- Shepp, L.A.; Logan, B.F. The Fourier reconstruction of a head section. IEEE Trans. Nucl. Sci. 1974, 21, 21–43. [Google Scholar] [CrossRef]
- Bradley, A.M.; Bosler, P.A.; Guba, O.; Taylor, M.A.; Barnett, G.A. Communication-efficient property preservation in tracer transport. SIAM J. Sci. Comput. 2019, 41, C161–C193. [Google Scholar] [CrossRef]
- Difonzo, F.V. Isochronous attainable manifolds for piecewise smooth dynamical systems. Qual. Theory Dyn. Syst. 2022, 21, 6. [Google Scholar] [CrossRef]
- Pi, D. Limit cycles for regularized piecewise smooth systems with a switching manifold of codimension two. Discret. Contin. Dyn. Syst. Ser. B 2019, 24, 881–905. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region Type | Dominant | Local Term Behavior | Global Term | |
|---|---|---|---|---|
| Smooth | ||||
| Near disc. | or | |||
| Near disc. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Chen, Q.; Jiao, X. Robust Discontinuity Indicators for High-Order Reconstruction of Piecewise Smooth Functions. Mathematics 2025, 13, 2442. https://doi.org/10.3390/math13152442
Li Y, Chen Q, Jiao X. Robust Discontinuity Indicators for High-Order Reconstruction of Piecewise Smooth Functions. Mathematics. 2025; 13(15):2442. https://doi.org/10.3390/math13152442
Chicago/Turabian StyleLi, Yipeng, Qiao Chen, and Xiangmin Jiao. 2025. "Robust Discontinuity Indicators for High-Order Reconstruction of Piecewise Smooth Functions" Mathematics 13, no. 15: 2442. https://doi.org/10.3390/math13152442
APA StyleLi, Y., Chen, Q., & Jiao, X. (2025). Robust Discontinuity Indicators for High-Order Reconstruction of Piecewise Smooth Functions. Mathematics, 13(15), 2442. https://doi.org/10.3390/math13152442