Abstract
Chebyshev-type methods have replaced the Chebyshev method in practice for solving nonlinear equations in abstract spaces. These methods are of the same R-order of three. However, they are easier to deal with, since the computationally expensive second derivative of the operator involved does not appear on these methods. However, the invertibility of the first derivative is still required at each step of the iteration. In this article, the inverse is replaced by a finite sum of linear operators. The convergence of the new Hybrid Chebyshev-Type Method (HCTM) is established under relaxed generalized continuity assumptions on the derivative and majorizing sequences. The iterates of the new methods converge to the original ones, but they are easier to find. Moreover, the numerical examples demonstrate that the new iterates converge essentially as fast to the solution. The methodology of this article can be used on other methods with inverses along the same lines due to its generality.
Keywords:
Chebyshev method; optimized and hybrid Chebyshev-type methods; Banach space; convergence; inverse of an operator MSC:
65G99; 65 H10; 49H17; 49M15
1. Introduction
Let denote Banach spaces and be a convex open set. A plethora of problems can be written using mathematical modeling like the following:
where is a Fréchet-differentiable operator [1,2,3,4,5,6,7,8]. A solution is needed in closed form. However, this is achievable only in special cases. That is why mostly iterative methods have been used to produce sequences converging to
Newton’s is without a doubt the most popular among methods of convergence of order two. It is defined for and all by the following:
The implementation of Newton’s method requires the inversion of the linear operator at each step, which may not be possible or computationally expensive. That is why in [9], we suggested hybrid Newton and Newton-like methods. In the case of Newton’s method, the hybrid analog is defined for (the space of all linear operators that are bounded) being an invertible operator, and being a natural number by the following:
Note, that The inverse of the linear operator is computed only once. The convergence analysis of method (3) and the numerical examples demonstrate that the number of iterations needed to reach the same error tolerance for (2) and (3) is essentially the same. Motivated by these developments and in order to consider methods of an order higher than two, we look at the Chebyshev method [10,11,12,13]:
and an optimization of the Chebysehev method:
Method (5) is of R-order three but does not require the computation of at each step as in (4), which is also of order three [10,11,12,13]. However, the implementation of (5) presents the same difficulties as (2). That is why we introduce the HCTM defined by the following:
In this article, we study the local as well as the semi-local analysis of methods (5) and (6). The analysis of convergence relies on generalized continuity assumptions, which relax the usual Lipschitz or Hölder conditions on In particular, the semi-local analysis also uses majorizing sequences to control the sequence The conclusions are the same as the case of methods (2) and (3).
The following definitions are used in this paper.
Definition 1.
The computational order of convergence of a sequence is defined by the following:
where are three consecutive iterations near the root α and [7,12,14].
Definition 2.
The approximated computational order of convergence of a sequence is defined by the following:
where are three consecutive iterates [7,12,14].
The rest of the article is structured as follows. The local followed by semi-local analyses of method (5) are presented in Section 2 and Section 3, respectively. The same is carried out for method (6) in Section 4 and Section 5. The numerical examples can be found in Section 6 and the conclusions in Section 7.
2. Local Analysis of Method (5)
The analysis uses certain criteria. Let It is also convenient to employ the abbreviations CNDF for a continuous and nondecreasing function and SPS for the smallest positive solution. Suppose the following:
- (H1)
- There exists a CNDF such that the equation has an SPS. Denote such a solution by Set
- (H2)
- There exists a CNDF for function defined by the following:such that the equation has an SPS in the interval Denote such a solution by
- (H3)
- For the function defined by the equation has an SPS in ). Denote such a solution byDenote the functions and by the following:andNote, that in practice, we select the smallest of the two versions of the functions and The real functions and are used to majorize the error distances appearing in Theorem 1 that follows.
- (H4)
- The equation has an SPS in Denote such a solution by Setand It follows by these definitions that for all ,andThere exists a relationship between the functions and w with the operators on method (5).
- (H5)
- There exists a solution of the equation and an invertible operator such that for eachSet The notation denotes the open ball with a center at and a radius Moreover, is its closure.
- (H6)
- for eachand
- (H7)
Remark 1.
- (i)
- The parameter r is shown to be a radius of convergence for the sequence given by formula (5) in Theorem 1.
- (ii)
- Some choices for M can be where I is the identity operator on X or In the latter case, is a simple solution. Note, that this is not assumed or necessarily implied by conditions (H1)–(H2). Consequently, method (5) can be used to find solutions of a multiplicity greater than one. Other choices for M are also possible, provided that criteria (H5) and (H6) hold such that where is an auxiliary point [11].
- (iii)
- The smaller of the two versions of the function is used. However, if these versions cross on the interval say, e.g., asfor andfor where then we choose
The local analysis of convergence uses conditions (H1)–(H7) and the preceding notation. Let
Theorem 1.
Suppose that criteria (H1)–(H7) hold and Then, the following assertions hold for method (5) and all :
and the sequence converges to
Proof.
Induction on n shall establish assertions (10)–(12). Clearly, Equation (10) holds if Let It follows by (7), (8), and (H5) that:
The estimate (14) and the Banach standard perturbation Lemma on linear operators [10,13,15,16,17] imply that and
In particular, if then the iterate is well-defined, and we can write as follows:
By applying (7), (9) (for ), Equation (15) (for ), and (H6), we obtain in turn by (16) the following:
Hence, the iterate and the assertion (11) hold if Then, from the second substep of method (5) for we have in turn that:
By (7), (9) (for ), and (17) we obtain in turn that:
Thus, the iterate and the assertion (12) hold if Note, that if , then . We need some estimates as follows:
or:
Note, that the iterate is well-defined by the third substep of method (5), since
Moreover, we can write as follows:
Then, by using (7) and (9) (for ), Equation (15) (for ), and (17)–(22), we obtain in turn that:
Therefore, the iterate and the assertion (13) hold if Simply exchange by a natural number in the preceding calculations to terminate the induction for items (10)–(13). Furthermore, from the estimate
we deduce that the iterate and □
Next, a domain is specified with only one solution of the equation
Proposition 1.
Suppose that there exists such that condition (H5) holds in the ball and such that:
Set Then, is the unique solution of the equation in the region
Proof.
Suppose that there exists a solution of the equation with Define the linear operator Then, it follows by (H5) and (25) that:
Hence, Then, from the identity
we conclude that □
Remark 2.
If all criteria (H1)–(H7) hold, then we can take in Proposition 1.
3. Semi-Local Analysis of Method (5)
The analysis is similar to the one of Section 2. However , and w are exchanged by , and respectively. Suppose the following:
- (C1)
- There exists a CNDF such that the equation has an SPS. Denote such a solution by Set
- (C2)
- There exists a CNDFDefine the sequence for some , and all by the following:and:The scalar sequence is shown to be majorizing for in Theorem 2. However, let us present a convergence criterion for it.
- (C3)
- There exists such that for all ,It follows by this condition and (26) that for all ,and there exists such that The limit point is the unique least upper bound of the sequence Notice that if the function is strictly increasing, and then we can take As in the local analysis, the real functions and v relate to the operators on method (5).
- (C4)
- There exist and an invertible operator such that for allNote, that Hene, and we can set Set
- (C5)
- for alland
- (C6)
Remark 3.
Possible selections for M are or Other selections are also possible as long as criteria (C4) and (C5) are satisfied. The semi-local analysis of convergence uses criteria (C1)–(C6) and the developed notation.
Theorem 2.
Suppose that criteria (C1)–(C6) hold. Then, the following assertions hold for method (5):
and there exists a solution of the equation such that
Proof.
Induction on n is used to show assertions (27)–(29). Clearly, assertion (27) holds if We also have by (26), method (5), and the definition of that
Thus, assertion (28) holds and the iterate By subtracting the first from the second substep of method (5), we obtain the following:
so
and
Thus, (29) holds and the iterate Then, by subtracting the second from the third substep, we obtain the following:
leading to
and
Hence, assertion (30) holds and the iterate
Then, we can write by the first substep of method (5) the following Ostrowski-type [16] representation:
leading to
Consequently, we obtain the following:
and
Thus, the induction for assertions (27)–(30) is complete and all the iterates belong in the ball We also have the following:
However, the sequence is Cauchy as convergent to Therefore, by (34), the sequence is also Cauchy in the Banach space X and as such, it is convergent to some Take and use the continuity of in (34) to obtain Furthermore, by the estimate (34) for and the triangle inequality, we have the following:
Finally, by letting in (35), we show assertion (31). □
Next, a domain is determined with only one solution of the equation
Proposition 2.
Suppose there exists a solution for some criterion (C4) holds in the ball , and there exists such that
Set
Then, the only solution of the equation in the domain is
Proof.
Let be a solution of the equation such that Define the linear operator Using condition (C4) and (36), we obtain in turn that
Thus, Finally, from the identity we deduce that □
Remark 4.
- (i)
- The limit point can be exchanged by in condition (C6).
- (ii)
- if all conditions (C1)–(C6) hold, then one can take and in Proposition 2.
4. Local Analysis of Method (6)
The analysis is analogous to the one of the Section 2. However, there are some differences. Suppose:
- (H1)’ = (H1).
- (H2)’ There exists and a CNDF such that for the function defined by the following:the equation has an SPS in the interval Denote such a solution by
- (H3)’ For the function defined by the following:the equation has an SPS in the interval Denote such a solution by
Define the function by the following:
where and the function is as defined above in condition (H4).
- (H4)’ The equation has an SPS. Denote such a solution by SetandIt follows by these definitions that for all :and
- (H5)’ There exist a solution of the equation and an invertible operator such that for all :Set
- (H6)’ for all
- (H7)’ and set for all
We have the following estimate:
Theorem 3.
Suppose that criteria (H1)’–(H2)’ hold. Then, the conclusions of Theorem 1 hold for method (6), provided that are replaced by and respectively.
Proof.
The computations are as in the proof of Theorem 1. Hence, we only stretch the differences. We can write by the first substep of method (6).
The following estimates are needed in turn:
and
leading to
Using (43) and (44), we obtain the following:
Then, by the second substep, we have the following:
Moreover, by the third substep of method (6), we obtain in turn that:
But by (40) and (45), we obtain in turn that:
where we also used
The rest of the proof is given in Theorem 1. □
The uniqueness of the solution domain can be found in Proposition 1.
5. Semi-Local Analysis for Method (6)
The analysis is similar to the one given in Section 3. Suppose:
- (C1)’ = (C1).
- (C2)’ There exists a CNDF Define the sequence for some , and all by the following:andA convergence criterion is needed for the sequence
- (C3)’ There exists such that for all and It follows by this criterion and (46) that for all , and there exists such that
- (C4)’ There exist and an invertible operator such that for allSet
- (C5)’ for alland
- (C6)’ where for all
Note, that we have the estimate
since Hence, and
Theorem 4.
Suppose that criteria (C1)’–(C6)’ hold. Then, the conclusions of Theorem 2 holds for method (6) provided that and are replaced by and respectively.
Proof.
It follows as in Theorem 2 and the estimates
thus,
and by (47),
Moreover, we can write again the Ostrowski [16] representation for as
Hence, by (48) and (49), we obtain the following:
Therefore, we obtain by the first substep of method (6) in turn that:
The rest follows as in the proof of Theorem 2. □
The uniqueness part and the comments are given in Proposition 2 and Remark 4.
6. Numerical Examples
In the following example, we consider method (6) for 6 , which remains independent of both . Additionally, they are compared with method (5), where and
Example 1.

The solution is sought for the nonlinear system
Let Then, the system becomes
Then:
Method (6), ,
Method (6), ,
Method (6), ,
Method (6), ,
Method (6), ,
Method (6), ,
Thus, the comparison shows that the behavior of method (6) is essentially the same as method (5). However, the iterates of method (6) are cheaper to obtain than (5). As observed in Table 1, Table 2, Table 3 and Table 4, the number of iterations required for the proposed methods with k ranging from 3 to 5 closely aligns with those of method (5).
Table 1.
The number of iterations needed to achieve tolerance (i.e, ()) with initial guess , and .
Table 2.
The number of iterations needed to achieve tolerance (i.e, ()) with initial guess , and .
Table 3.
The number of iterations needed to achieve tolerance (i.e, ()), where , and .
Table 4.
The number of iterations needed to achieve tolerance (i.e, ()), where , and .
The approximated solution is with the function value error , which is obtained using the initial point with the error tolerance (i.e, ()). It is observed that with the same tolerance level, one can obtain the mentioned approximated solution for other initial points considered in Table 1 and Table 2.
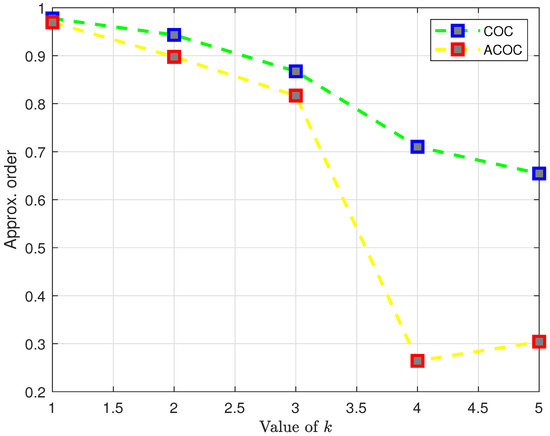
Table 5 and Figure 1 show the results of calculations used to determine the Computational Order of Convergence (COC) and the Approximated Computational Order of Convergence (ACOC), aiming to compare the convergence order of method (6) with the convergence order of method (5).
Table 5.
The computational order of convergence and the approximated computational order of convergence, where , .
Figure 1.
COC and ACOC using , .
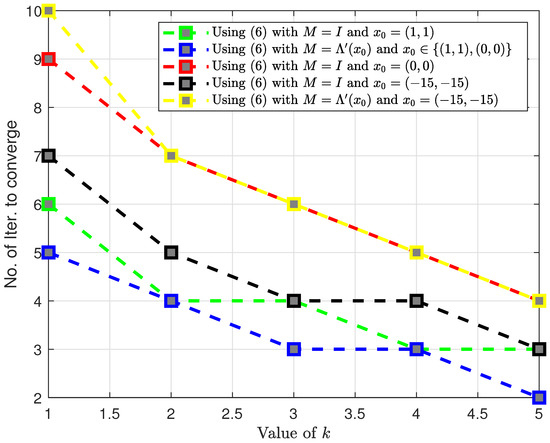
Table 5 and Figure 1 demonstrate that the convergence of the proposed methods closely corresponds to the convergence of Newton’s method, particularly for values of k ranging from 4 to 5 with the convergence order closely approximating 2. Furthermore, Figure 2 shows a quick comparison of Table 1, Table 2 and Table 3.
Figure 2.
Number of iterations needed to achieve tolerance .
Example 2.
Let and We study the motion of a particle moving in three dimensions that has started from rest. The mapping Λ is defined on D for as:
Then, the definition of the derivative according to Fréchet [2,10,13,18,19,20] is given for the mapping Λ:
The point solves the equation Moreover, The conditions of Theorem 1 hold provided that and Then, by (37), we have
Example 3.
Let stand as the space of continuous functions mapping the interval into the real number system. Let and with The operator Λ is defined on as:
Nonlinear integral equations of the form are of Hemmerstein-type and are used to study the motion problems [5,12,18,19]. Here, the definition of the derivative according to Fréchet gives for the function Λ:
for each Therefore, the conditions are validated, since for , provided that Then, we obtain by (37) that
7. Concluding Remarks
The Chebyshev method is of R-order three. However, it is computationally expensive because it requires the evaluation of the second derivative of the operator involved at each step of the iteration. By replacing the second derivative in terms of first derivatives, new methods are derived of R-order three. However, the implementation still remains for the new methods, since the inverse of a certain linear operator also needs to be computed. That is why we replace the inverse by a finite sum of linear operators converging to that inverse. The local as well as the semi-local analysis of convergence is studied, relying on the concept of related conditions that control the derivative and majorizing sequences. The sequence generated by the new HCTM are easier to find and essentially converge to the solution as fast as the optimized Chebysehev methods. This fact is also demonstrated by numerical examples. Due to its generality, the methodology of this article can also be applied to other methods with inverses [11,16,19,20,21,22,23]. This is the direction of our future work.
Author Contributions
Conceptualization, I.K.A. and S.G.; Algorithm, I.K.A. and S.G.; methodology, I.K.A. and S.G.; software, I.K.A. and S.G.; validation, I.K.A. and S.G.; formal analysis, I.K.A. and S.G.; investigation, I.K.A. and S.G.; resources, I.K.A. and S.G.; data curation, I.K.A. and S.G.; writing—original draft preparation, I.K.A. and S.G.; writing—review and editing, I.K.A. and S.G.; visualization, I.K.A. and S.G.; supervision, I.K.A. and S.G.; project administration, I.K.A. and S.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
We would like to thank Muniyasamy M, from the Department of Mathematical and computational Sciences, the National Institute of Technology Karnataka, India for providing code for Example 1 of this paper.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Argyros, I.K.; George, S. On the complexity of extending the convergence region for Traub’s method. J. Complex. 2020, 56, 101423. [Google Scholar] [CrossRef]
- Ben-Israel, A.; Greville, T.N.E. Generalized Inverses: Theory and Applications; John Wiley and Sons: New York, NY, USA, 1974. [Google Scholar]
- Moore, R.H.; Nashed, M.Z. Approximations to generalized inverses of linear operators. SIAM J. Appl. Math. 1974, 27, 1–16. [Google Scholar] [CrossRef]
- Nashed, M.Z. Generalized Inverses and Applications; Academic Press: New York, NY, USA, 1976. [Google Scholar]
- Padcharoen, A.; Kumam, P.; Chaipunya, P.; Shehu, Y. Convergence of inertial modified Krasnoselskii-Mann iteration with application to image recovery. Thai J. Math. 2020, 18, 126–142. [Google Scholar]
- Proinov, P.D.; Petkova, M.D. Local and semilocal Convergence of a family of Multi-point Weierstrass-type Root-Finding Methods. Mediterr. J. Maths. 2020, 17, 107. [Google Scholar] [CrossRef]
- Regmi, S.; Argyros, I.K.; George, S.; Argyros, C.I. Extended Convergence of Three Step Iterative Methods for Solving Equations in Banach Space with Applications. Symmetry 2022, 14, 1484. [Google Scholar] [CrossRef]
- Häubler, W.M. A Kantorovich-type convergence analysis for the Gauss-Newton-method. Numer. Math. 1986, 48, 119–125. [Google Scholar]
- Argyros, I.K.; George, S.; Shakhno, S.; Regmi, S.; Havdiak, M.; Argyros, M.I. Asymptotically Newton-Type Methods without Inverses for Solving Equations. Mathematics 2024, 12, 1069. [Google Scholar] [CrossRef]
- Kantorovich, L.V.; Akilov, G. Functional Analysis in Normed Spaces; Fizmatgiz: Moscow, Russia, 1959; (German translation, Akademie-Verlag: Berlin, Germany, 1964): (English translation (2nd edition), Pergamon Press: London, UK, 1981), (1964). [Google Scholar]
- Ezquerro, J.A.; Hernandez-Veron, M.A. Domains of global convergence for Newtons’s method from auxiliary points. Appl. Math. Lett. 2018, 85, 48–56. [Google Scholar] [CrossRef]
- Ezquerro, J.A.; Hernandez-Veron, M.A. Newton’s Method: An Updated Approach of Kantorovich’s Theory; Birkhauser: Basel, Switzerland, 2017. [Google Scholar]
- Krasnoselskij, M.A. Two remarks on the method of successive approximations. Uspehi Mat. Nauk. 1995, 10, 123–127. (In Russian) [Google Scholar]
- Traub, J.F.; Wozniakowsi, H. Convegence and complexity of Newton iteration for operator equations. J. Assoc. Comput. March. 1979, 26, 250–258. [Google Scholar] [CrossRef]
- Proinov, P.D. New general convergence theory for iterative processes and its applications to Newton- Kantarovich type theorems. J. Complex. 2010, 25, 3–42. [Google Scholar] [CrossRef]
- Ostrowski, A.M. Solution of Equations in Euclidean and Banach Spaces; Academic Press: New York, NY, USA, 1973. [Google Scholar]
- Yamamoto, T. A convergence theorem for Newton-like methods in Banach spaces. Numer. Math. 1987, 51, 545–557. [Google Scholar] [CrossRef]
- Berinde, V. Iterative Approximation of Fixed Points; Springer: New York, NY, USA, 2007. [Google Scholar]
- Deuflhard, P. Newton Methods for Nonlinear Problems. Affine Invariance and Adaptive Algorithms; Springer Series in Computational Mathematics; Springer: Berlin/Heidelberg, Germany, 2004; Volume 35. [Google Scholar]
- Ezquerro, J.A.; Gutierrez, J.M.; Hernandez, M.A.; Romero, N.; Rubio, M.J. The Newton Method: From Newton to Kantorovich. Gac. R. Soc. Mat. Esp. 2010, 13, 53–76. (In Spanish) [Google Scholar]
- Rheinboldt, W.C. A unified convergence theory for a class of iterative process. SIAM J. Numer. Anal. 1968, 5, 42–63. [Google Scholar] [CrossRef]
- Catinas, E. The inexact, inexact perturbed, and quasi-Newton methods are equivalent models. Math. Comp. 2005, 74, 291–301. [Google Scholar] [CrossRef]
- Potra, F.A. Sharp error bounds for a class of Newton-like methods. Lib. Math. 1985, 5, 71–84. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).