
Performance Optimization with LPV Synthesis for Disturbance Attenuation in Planar Motors


Abstract
1. Introduction
2. Modeling and Tracking-Error Dynamics with Force and Torque Modulation
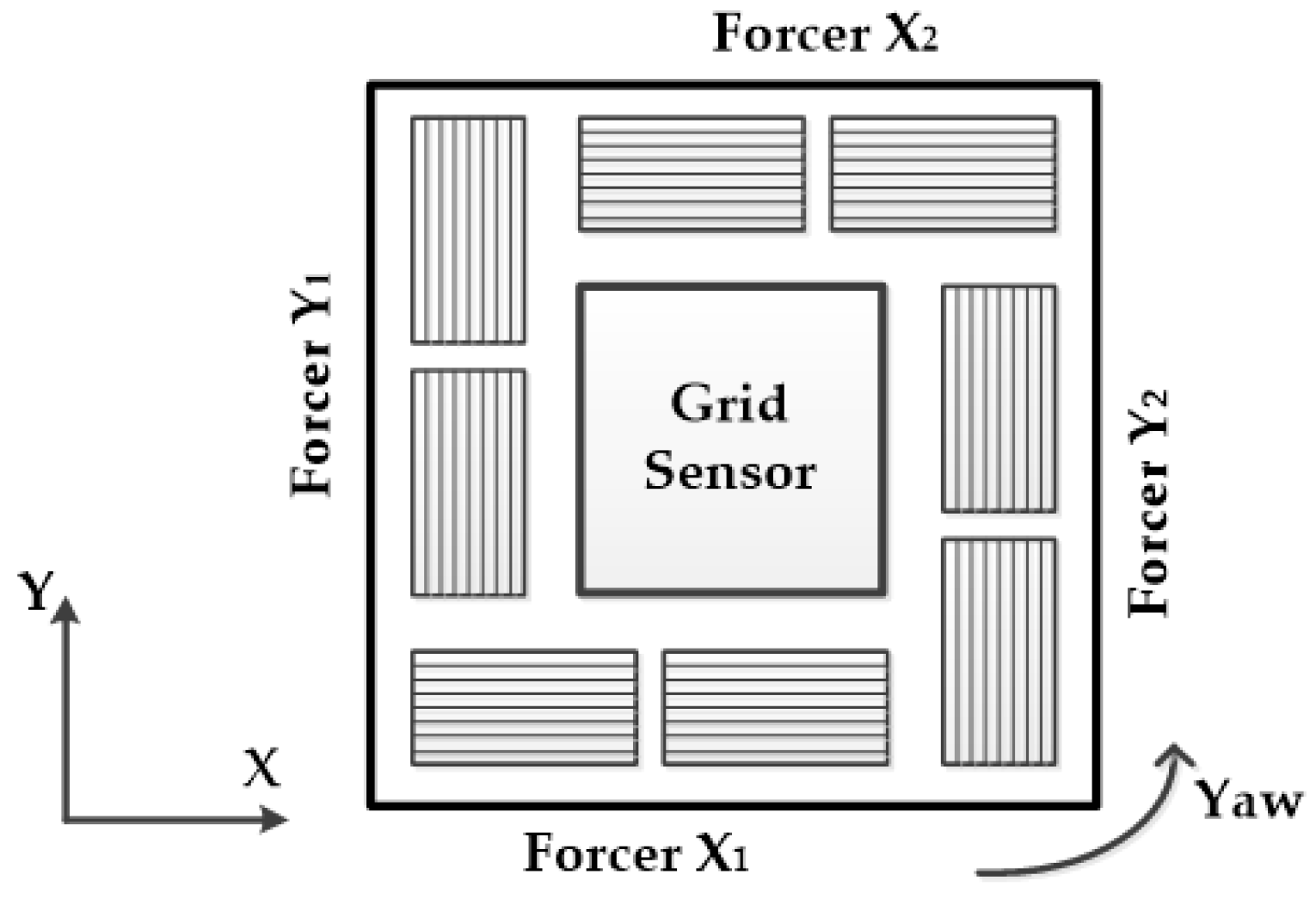
2.1. Planar Motor Modeling
2.2. Tracking-Error Dynamics with Force and Torque Modulation
- where , , and are the desired positions of the X and Y axes, and the yaw rotation of the motor, respectively; , and are the virtual velocities of the X and Y axes, and the virtual yaw rate, respectively; , and are the desired velocities of the X and Y axes, and the desired yaw rate, respectively; , and are positive constants, respectively; , and are the position-tracking errors of the X and Y axes, and yaw rotation, respectively; and are the desired forces from the two X-axis forcers; and are the desired forces from the two Y-axis forcers; and are the total forces in the X and Y directions.
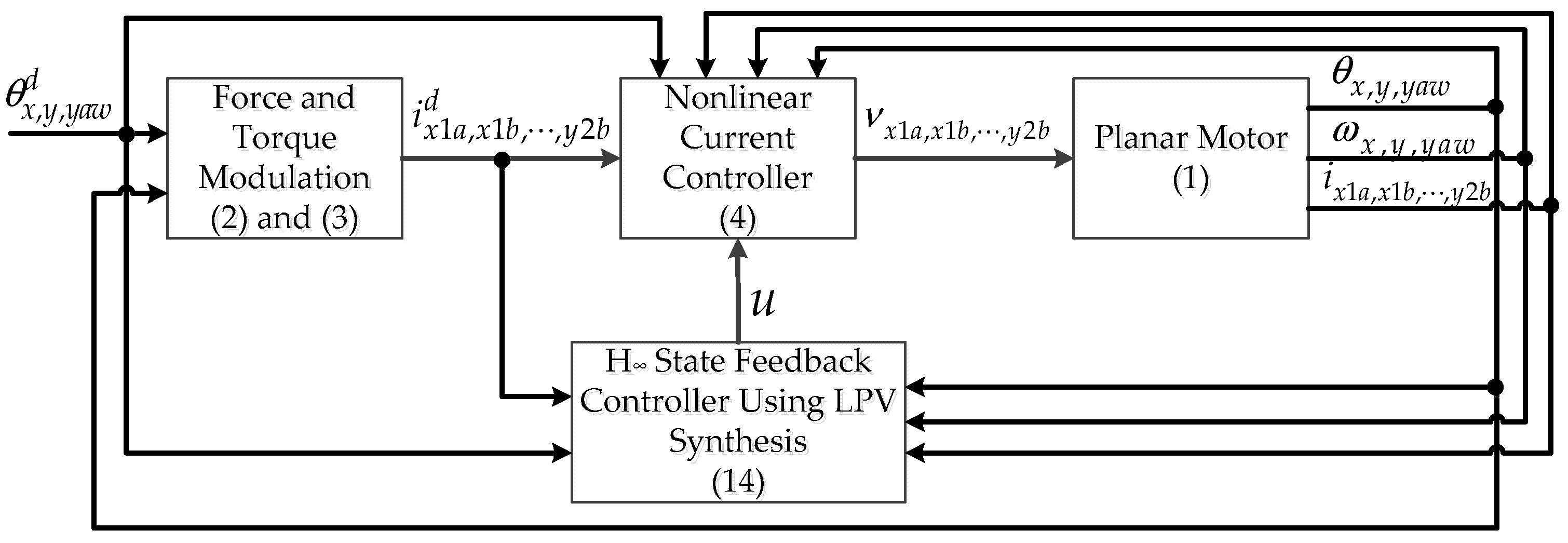
3. H∞ State Feedback Control Using LPV Synthesis
- (A1) is stable.
- (A2) is invertible.
- (A3) .
- (A4) has no unobservable modes on the imaginary axis.
- There exists , such that .
- There exists , such that
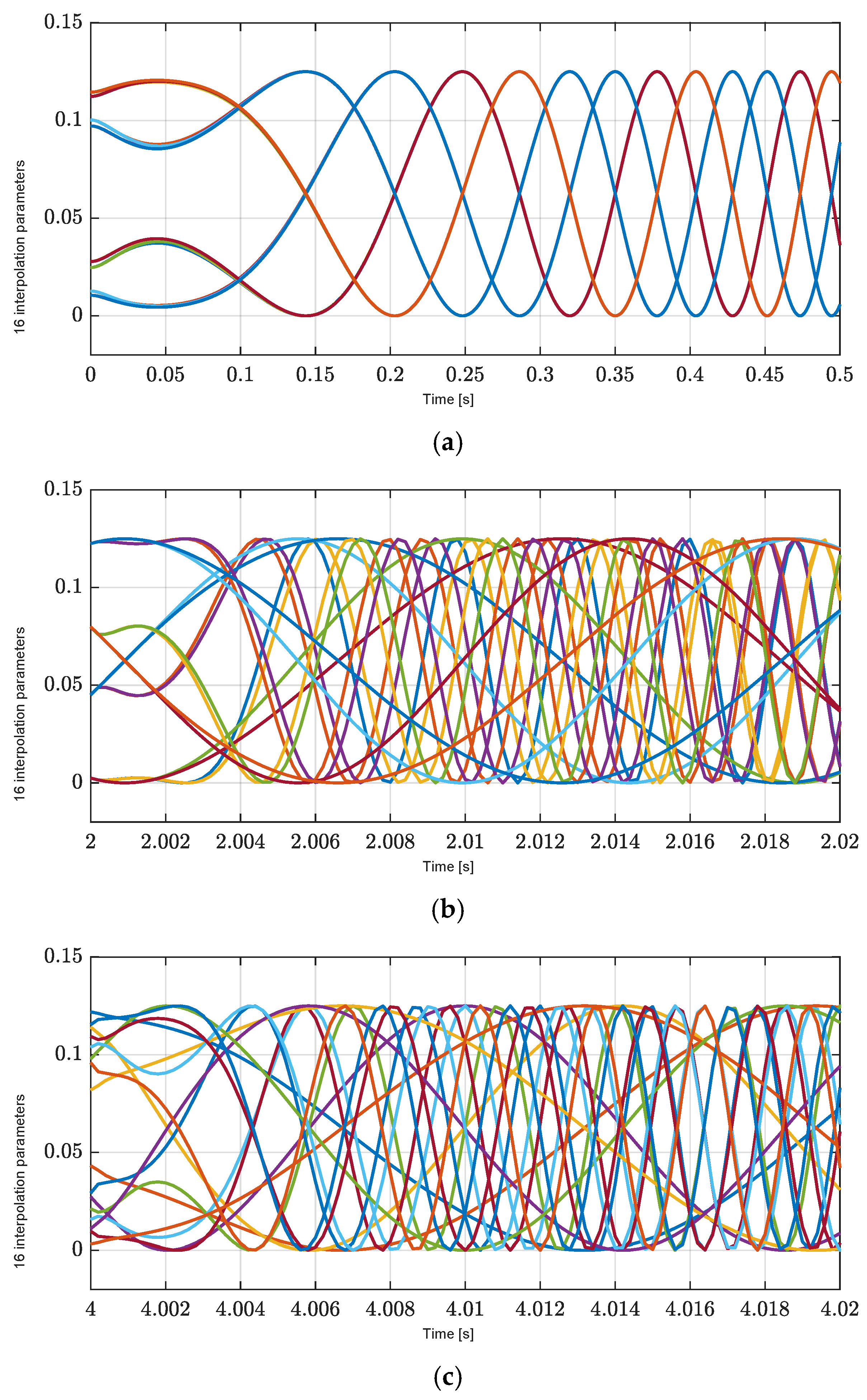
4. Simulation Results
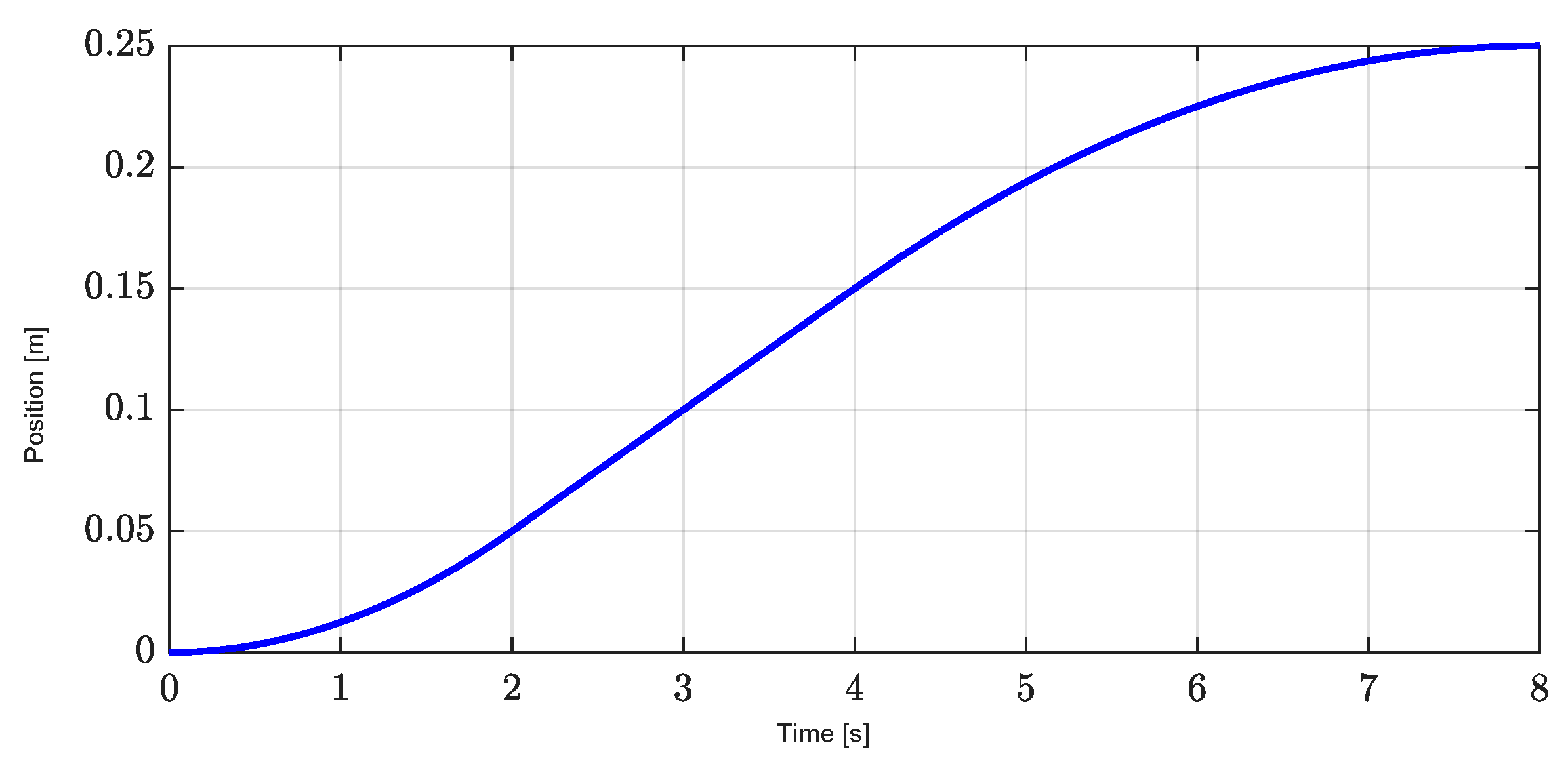
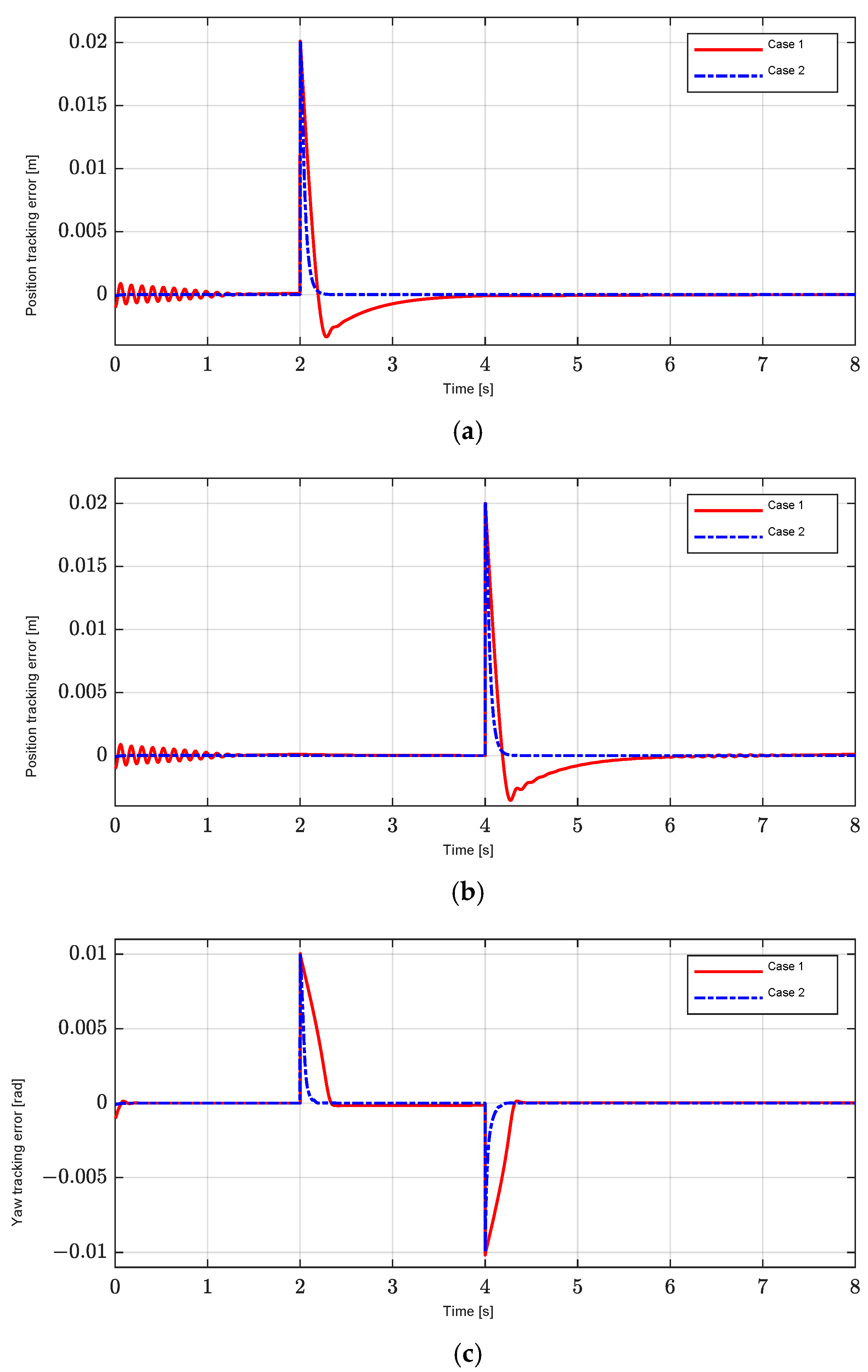
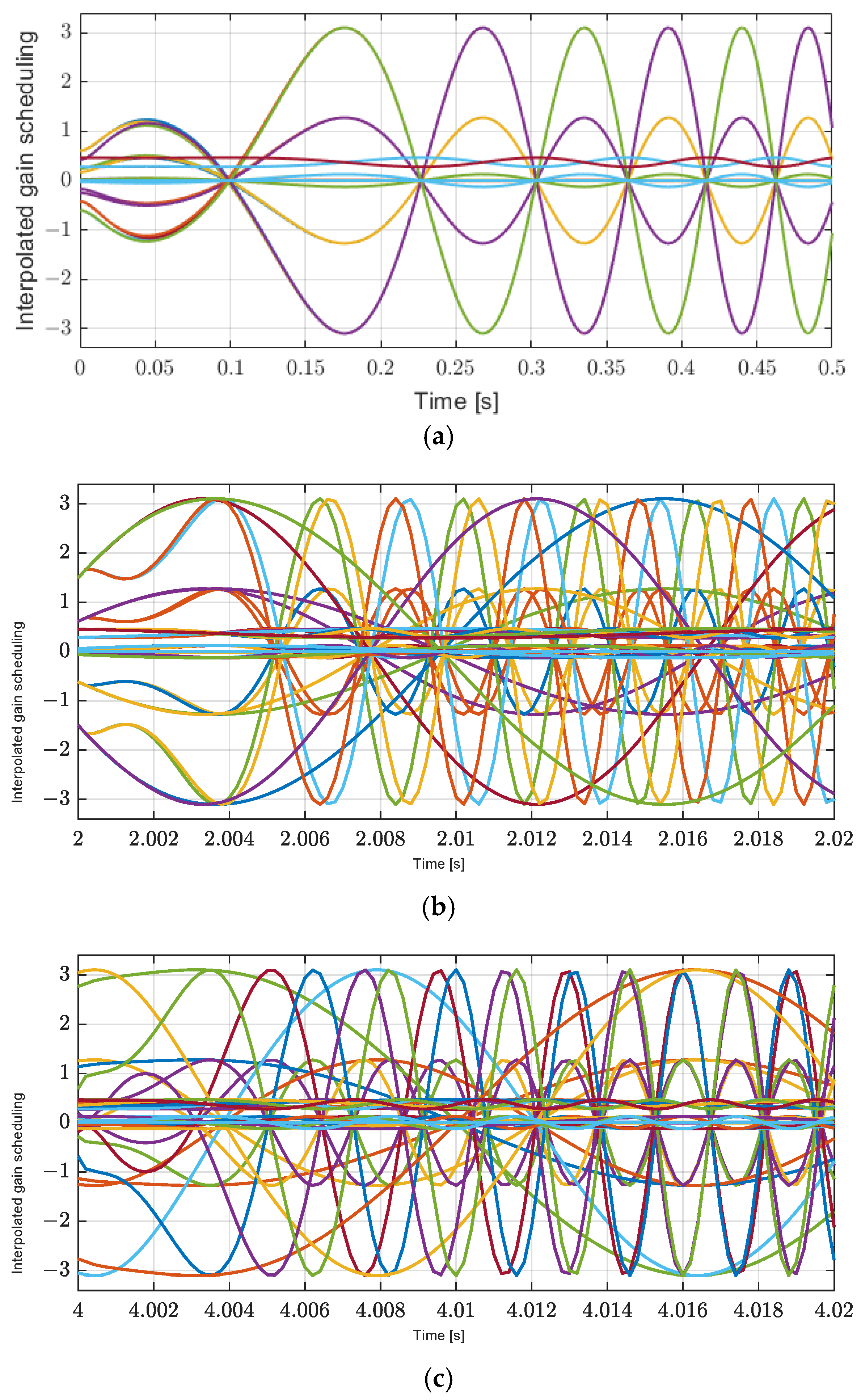
4.1. Seventh-Order Reference Position Profiles
- Case 1: Conventional PID controller.
- Case 2: Proposed control method.
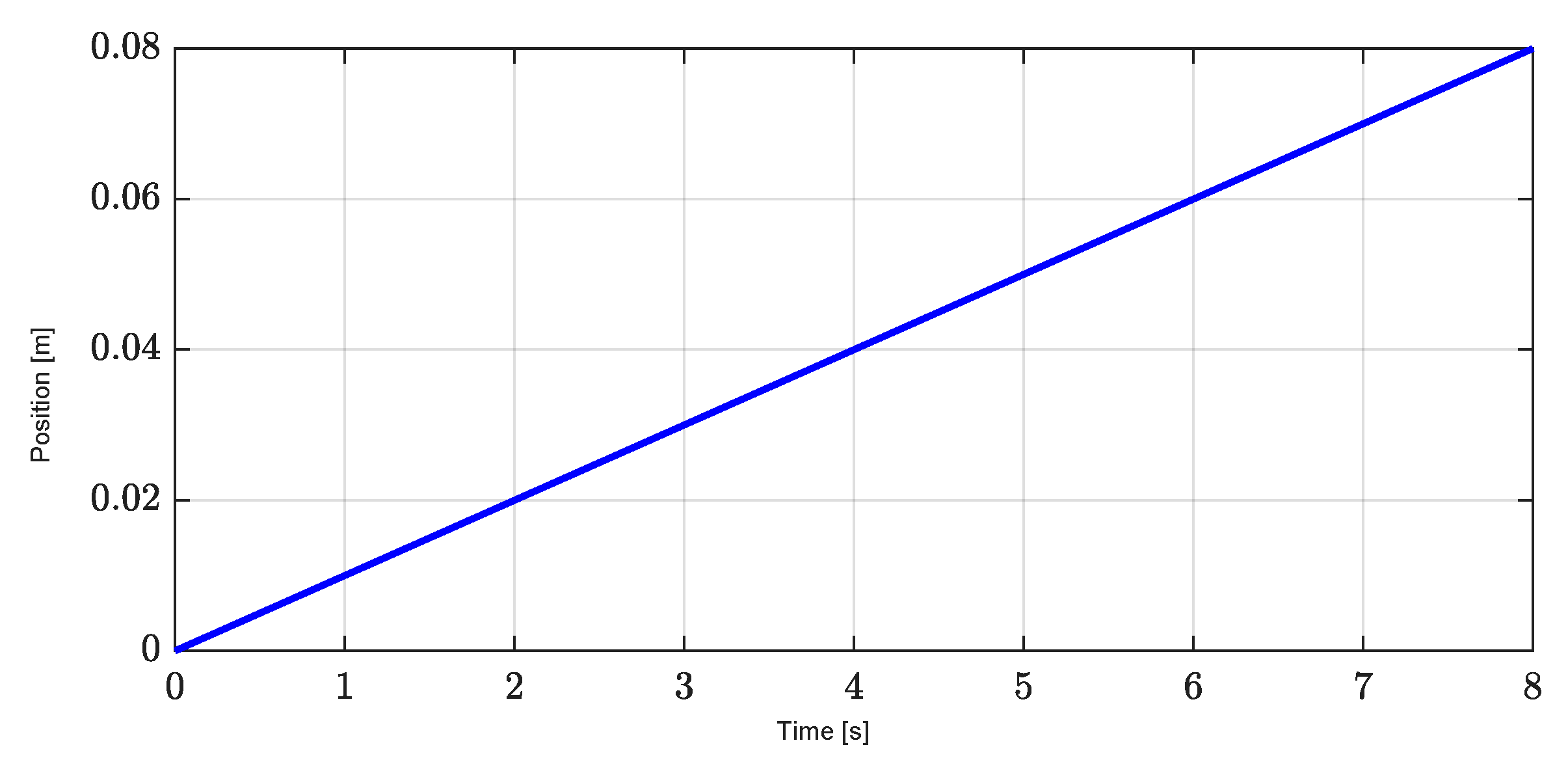
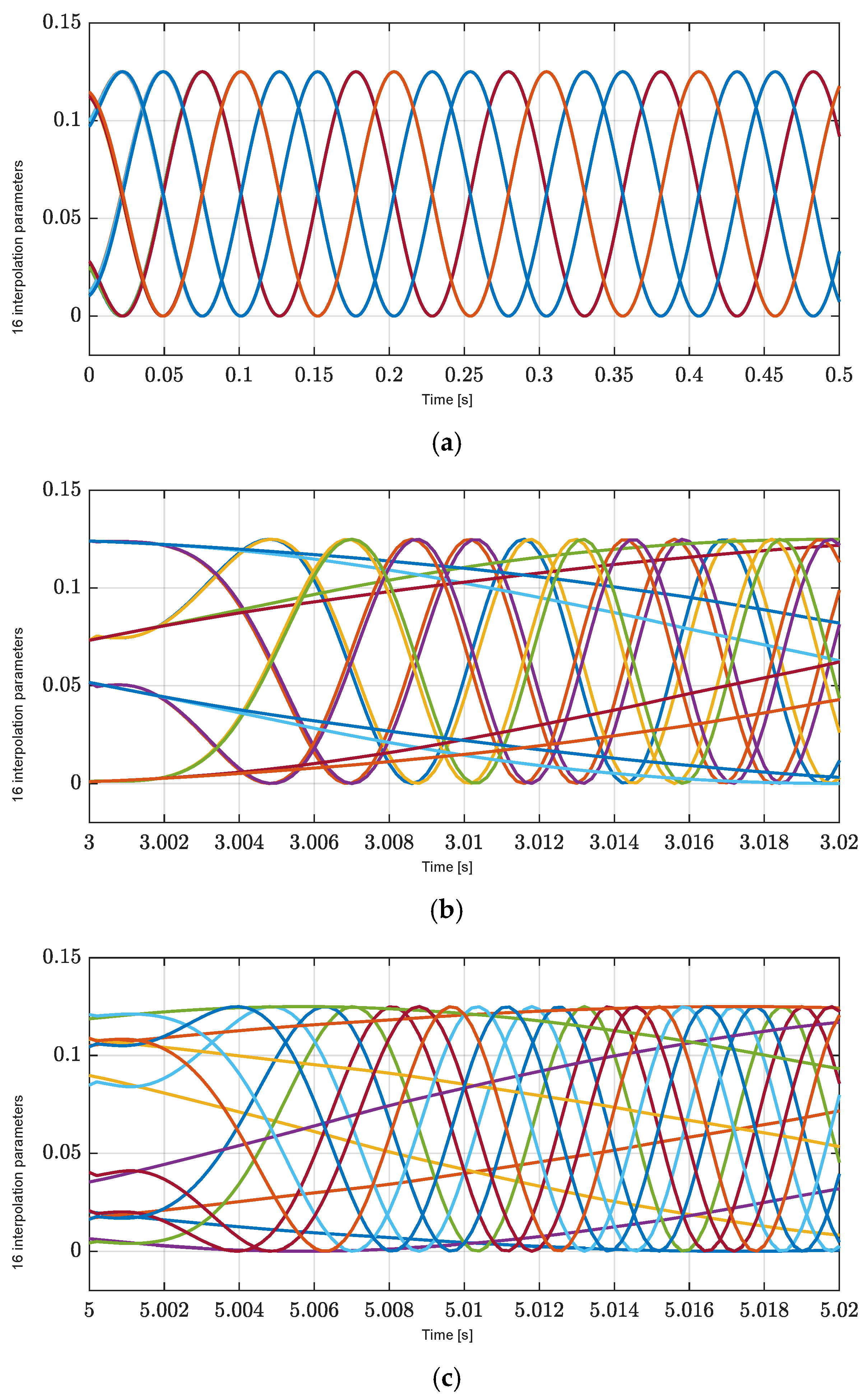
4.2. Ramp Reference Position Profiles
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Zheng, T.; Xu, F.; Lu, X.; Xu, X. A new multi-objective optimization method of magnetic levitation planar motor. IEEE Trans. Magn. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- Zhang, Y.; Ding, K.; Du, S. Design study of a high loading superconducting magnetically levitated planar motor. IEEE Trans. Appl. Supercond. 2021, 31, 2021–2024. [Google Scholar] [CrossRef]
- Su, K.H.; Yim, J.; Kim, W.; Lee, Y. Lyapunov-based controller using nonlinear observer for planar motors. Mathematics 2022, 10, 2177. [Google Scholar] [CrossRef]
- Ou, T.; Hu, C.; Zhu, Y.; Zhang, M. Generation mechanism and decoupling strategy of coupling effect in maglev planar motor. IEEE/ASME Trans. Mechatron. 2023, 28, 781–791. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F. Robust Adaptive Control of Sawyer Motors Without Current Measurements. IEEE/ASME Trans. Mechatron. 2004, 9, 689–696. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F.; Ng, T.L.; Cherepinsky, I. Control Design and Implementation for Sawyer Motors Used in Manufacturing Systems. IEEE Trans. Control Syst. Technol. 2011, 19, 1464–1478. [Google Scholar] [CrossRef]
- Li, X.; Zhu, H.; Ma, J.; Teo, T.J.; Teo, C.S.; Tomizuka, M.; Lee, T.H. Data-driven multiobjective controller optimization for a magnetically levitated nanopositioning system. IEEE/ASME Trans. Mechatron. 2020, 25, 1961–1970. [Google Scholar] [CrossRef]
- Ou, T.; Hu, C.; Zhu, Y.; Zhang, M.; Zhu, L. Intelligent feedforward compensation motion control of maglev planar motor with precise reference modification prediction. IEEE Trans. Ind. Electron. 2021, 68, 7768–7777. [Google Scholar] [CrossRef]
- Proimadis, I.; Custers, C.H.H.M.; Toth, R.; Jansen, J.W.; Butler, H.; Lomonova, E.; Hof, P. Active deformation control for a magnetically levitated planar motor mover. IEEE Trans. Ind. Appl. 2022, 58, 242–249. [Google Scholar] [CrossRef]
- Fu, H.; Hu, C.; Yu, D.; Zhu, Y.; Zhang, M. Cascaded iterative learning motion control of precision maglev planar motor with experimental investigation. ISA Trans. 2023, 139, 463–474. [Google Scholar] [CrossRef]
- Huang, S.D.; Chen, L.; Cao, G.Z.; Wu, C.; Xu, J.; He, Z. Predictive position control of planar motors using trajectory gradient soft constraint with attenuation coefficients in the weighting matrix. IEEE Trans. Ind. Electron. 2021, 68, 821–837. [Google Scholar] [CrossRef]
- Huang, S.D.; Cao, G.Z.; Xu, J.; Cui, Y.; Wu, C.; He, J. Predictive position control of long-stroke planar motors for high-precision positioning applications. IEEE Trans. Ind. Electron. 2021, 68, 796–811. [Google Scholar] [CrossRef]
- Yim, J.; You, S.; Lee, Y.; Kim, W. Chattering Attenuation Disturbance Observer for Sliding Mode Control: Application to PMSM. IEEE Trans. Ind. Electron. 2023, 70, 5161–5170. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S. GPIO based super-twisting sliding mode control for PMSM. IEEE Trans. Circuits Syst. II Exp. Briefs 2021, 68, 747–751. [Google Scholar] [CrossRef]
- Tian, D.; Xu, R.; Sariyildiz, E.; Gao, H. An adaptive switching-gain sliding-mode-assisted disturbance observer for high-precision servo control. IEEE Trans. Ind. Electron. 2021, 69, 1762–1772. [Google Scholar] [CrossRef]
- Xie, Y.; Qiao, J.; Yu, X.; Guo, L. Dual-disturbance observers-based control for a class of singularly perturbed systems. IEEE Trans. Syst. Man. Cybern. Syst. 2022, 52, 2423–2434. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Liu, Y. Speed-current single-loop control with overcurrent protection for PMSM based on time-varying nonlinear disturbance observer. IEEE Trans. Ind. Electron. 2022, 69, 179–189. [Google Scholar] [CrossRef]
- Su, K.H.; Byeon, K.; Kim, W.; Lee, Y. LPV H∞ control with an augmented nonlinear observer for sawyer motors. Mathematics 2022, 10, 18. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters and Controller Gains | Values | Parameters and Controller Gains | Values |
|---|---|---|---|
| 4 × 10−3 kg × m2 | |||
| 1.016 × 10−3 m | 1.8 kg | ||
| 7 × 10−4 H | |||
| 1 × 10−5 N×m×s/rad |
| Performance (s) | Case 1 (Conv.) | Case 2 (Prop.) | Rate of Change |
|---|---|---|---|
| Convergence time (X axis) | 2 | 0.4 | −80% |
| Convergence time (Y axis) | 1.5 | 0.2 | −86.7% |
| Convergence time (Yaw) | 0.4 | 0.2 | −50% |
| Performance (s) | Case 1 (Conv.) | Case 2 (Prop.) | Rate of Change |
|---|---|---|---|
| Convergence time (X axis) | 2.7 | 0.4 | −85.2% |
| Convergence time (Y axis) | 2 | 0.2 | −90% |
| Convergence time (Yaw) | 0.8 | 0.4 | −50% |
| Rate of change = (Case2 − Case1)/Case1 × 100. | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, K.H.; Park, K.; Son, Y.S.; Lee, Y. Performance Optimization with LPV Synthesis for Disturbance Attenuation in Planar Motors. Mathematics 2024, 12, 3293. https://doi.org/10.3390/math12203293
Su KH, Park K, Son YS, Lee Y. Performance Optimization with LPV Synthesis for Disturbance Attenuation in Planar Motors. Mathematics. 2024; 12(20):3293. https://doi.org/10.3390/math12203293
Chicago/Turabian StyleSu, Khac Huan, Keunhoon Park, Young Seop Son, and Youngwoo Lee. 2024. "Performance Optimization with LPV Synthesis for Disturbance Attenuation in Planar Motors" Mathematics 12, no. 20: 3293. https://doi.org/10.3390/math12203293
APA StyleSu, K. H., Park, K., Son, Y. S., & Lee, Y. (2024). Performance Optimization with LPV Synthesis for Disturbance Attenuation in Planar Motors. Mathematics, 12(20), 3293. https://doi.org/10.3390/math12203293