Abstract
The optimal control problems of degenerate parabolic equations have many applications in economics, physics, climatology, and so on. Motivated by the applications, we consider the optimal control problems of a class of nonlinear degenerate parabolic equations in this paper. The main result is that we deduce the first order necessary condition for the optimal control problem of nonlinear degenerate parabolic equations by variation method. Moreover, we investigate the uniqueness of the solutions to the optimal control problems. For the linear equations, we obtain the global uniqueness, while for the nonlinear equations, we obtain only the local uniqueness. Finally, we give a numerical example to validate the theoretical results.
Keywords:
the optimal control; degenerate parabolic equations; the first order necessary conditions; nonlinear equations MSC:
35K51; 35K65; 35Q93; 49J20; 49K20
1. Introduction
Optimal control problems governed by partial differential equations have a wide range of applications in real world; see references [1,2,3]. The optimal control problems for the parabolic equations have been widely investigated in [4,5,6,7] and the references therein. However, there are few papers concerned with the optimal control problems of the degenerate parabolic equations. The degenerate parabolic equations can be used to describe many phenomena in reality, such as a simplified Crocco-type equation coming from a laminar flow on a flat plate [8], the Black–Scholes model coming from economics [9], and the Budyko–Sellers model coming from climatology [10]. In particular, the Black–Scholes equation (see [9]) from the current market prices of options is as follows:
where U is the price of an option, S is the current option price of the stock, r is the annualized risk-free interest rate, q is the dividend yield, and is volatility of an underlying asset. Note that Equation (1) is degenerate on the boundary . As is known, an inverse problem of identifying coefficient can be transformed into an optimal control problem. Using the optimal control framework, the authors concerned with the degenerate parabolic Equation (2) with and in one dimension, and investigated an inverse problem of identifying the radiative coefficient in [11]. In [9], the authors identified the volatility of an underlying asset in (1) from option prices. Moreover, for the optimal control problems of degenerate parabolic equations with interior degeneracy, one can see [12,13]. In [12], the authors studied the optimal control problem of a degenerate parabolic equation with interior degeneracy. The state is the density of a diffusive population, whose growth is governed by logistic terms. The control is the trapping rate and the cost functional is a combination of the damage and trapping costs. In [13], the authors dealt with an optimal control problem in the coefficients of a strongly degenerate diffusion equation with interior degeneracy. The control is the coefficient of the diffusion term, and the aim is to seek the control to minimize the difference of the state and the observation. For other results of the degenerate Equation (2), such as the null controllability and the approximate controllability, one can see papers [14,15,16,17,18].
In this paper, we consider the following semilinear degenerate parabolic equation
where is a bounded smooth domain of with , , with in and , , is a measurable function in and differentiable at uniformly in , and there exist constants such that
Note that Equation (2) is degenerate on the set . According to the degeneracy, the lateral boundary is divided into three parts in [19], i.e., the nondegenerate part
the weakly degenerate part
and the strongly degenerate part
Define
In [16], the authors prove the well-posedness of Equation (2), with the following initial and boundary conditions:
where .
Assume that is the desirable value. The optimal control problem is to find a control u such that the solution y to problems (2), (5), and (6) approaches , and the cost of the control u is small. Define the cost functional
where , and the admissible control set is
We want to find a control such that
In the present paper, we consider the optimal control problem for the semilinear degenerate parabolic equation in a multi-dimensional space. Since the equation is degenerate on boundary, the weak solution to the degenerate parabolic problem (2), (5), (6) has poor regularity, even if the initial condition is sufficiently smooth. To overcome the difficulty, we introduce a weighted space instead of classical Sobolev space as the space of the state, analyze the compactness of the weighted space, and prove the differentiability of the state in the weighted space with respect to the control. On the other hand, the differentiability of the state with respect to the control is important for deriving the necessary conditions. However, for some other degenerate equations, the differentiability may not hold; see [20] for example. Due to the degeneracy, the differentiability of the state with respect to the control is not obvious, especially for the nonlinear equations. Choosing suitable spaces for the state and the control, we prove the differentiability for the nonlinear equations by using the techniques presented in [6].
The paper is organized as follows. In , we introduce the well-posedness of problems (2), (5), and (6), and prove the existence of the optimal control. In , for the linear degenerate parabolic problem, we obtain the first-order necessary condition and prove the uniqueness of optimal control for any . In , for the nonlinear degenerate parabolic problem, we obtain the first-order necessary condition and prove the uniqueness of optimal control when T is sufficiently small. In , we present a numerical experiment. In , we summarize the findings of this study and suggest directions for future work.
2. The Existence of the Optimal Control for the Semilinear Problem
In this section, we prove the existence of the optimal control for the optimal control problem (7) subject to the semilinear problem (2), (5), and (6).
Remark 1.
It follows from [19] that the space has different property from . If , there exists trace on in the trace sense, while there is no trace on .
Define the space
with the norm
Definition 1.
Consider the linear problem
Lemma 2.
(i)
where C is a constant depending on T.
(ii) For any , it holds that , ,
where C is a constant depending on T, and τ.
(iii) If , then , and
where C is a constant depending on T, and τ.
(iv) If , , then and
The proof of Lemma 2 is in [16] (Proposition 2.1).
Then, Equation (2) is equivalent to
It follows from (3), and (4) that satisfies
where . From Lemma 2, one can obtain the estimates for the nonlinear problems (2), (5), and (6).
Corollary 1.
(i)
where C is a constant depending on T.
(ii) For any , it holds that , ,
where C is a constant depending on T, and τ.
(iii) If , then , and
where C is a constant depending on T, and τ.
(iv) If , , then and
Next, we prove the existence of the optimal control.
Theorem 1.
There exists a control , such that .
Proof.
Let be a sequence such that
Denote by the solution to problems (2), (5), and (6) with . Since , there exist a subsequence of , denoted by itself, and a function , such that
For any small enough, define and . From Corollary 1 (i) and (ii), we have
where C is a constant depending on T, a and . There exist a subsequence of , denoted by itself, and a function , such that
and
Note that
If follows from (3) that
Hence, we have
due to (15).
From Definition 1, we have, for any ,
Hence, is the solution to problems (2), (5), and (6) with . From the weakly lower semi-continuity of the norm in , we have
Hence,
□
3. Optimal Control Problem for the Linear Equation
In this section, we study the necessary conditions for the optimal control problem subject to the linear degenerate parabolic equation. Precisely, define the cost functional
where y is the weak solution to the linear problems (8)–(10).
Note that from Theorem 1, one can obtain the existence of the optimal control for .
Corollary 2.
There exists a control , such that .
Now, we derive the necessary condition.
Theorem 2.
Proof.
For any , denote . For any , let be the solution to problems
Then, is the weak solution to problems
From Lemma 2, we have
where C is depending on . Thus,
Denote
Then, is the solution to the following problem:
Note that
Since and are the weak solutions to problems (23)–(25) and (18)–(20), respectively, we have and due to Lemma 2. Since is the weak solution to problems (23)–(25), we have, for any with and ,
Take in (28) to yield
Take in (29) to yield
Since is the minimum point of in , it holds
The proof is complete. □
By standard argument [6], we know the following corollary from Theorem 2.
Corollary 3.
Proposition 1.
The optimality system
has at most one solution.
Proof.
Assume that and are the solutions of problems (33)–(36). For , denote . Then, . Note that is the weak solution to the problem
and is the weak solution to the problem
From Lemma 2, we have . Since is the weak solution to problems (37)–(39), we have, for any with and ,
Take in (43) to yield
Take in (44) to yield
From Corollary 3 and Proposition 1, we have the uniqueness of the optimal control for the problem .
4. Optimal Control Problem for the Nonlinear Equation
In this section, we study the necessary condition of the optimal control problem for the nonlinear equation. Consider the following problem:
where the functions satisfy the conditions in Section 1, , . Moreover, f is differentiable at for all and satisfies the local Lipschitz condition. That is to say, for every with , , there exists a constant such that
where is depending on M.
Lemma 3.
Define
Then, the Nemytskii operator Φ associated with f is Fréchet differentiable in and
The proof of Lemma 3 is in [6] (see the proof of Lemma 4.12 in Chapter 4).
Proposition 2.
S is Fréchet differentiable and
where w is the solution to the problem
Proof.
For , denote , . Then, satisfies
where
Let be the solution to the problem
and be the solution to the problem
Then, one can see
From Corollary 1, are bounded in . It follows from (3) and (4) that and . From (4) and (50), one has and
Thus, . From Lemma 2, we have
From Lemma 3, is Fréchet differentiable. Hence,
Denote
Note that Equation (51) can be written as
From Lemma 2,
Theorem 4.
Proof.
For any , denote . For , let be the solution to the problem
Then, is the weak solution to the problem
where
From (3), (4), and (50), one has
where C is a positive constant independent of . From Lemma 2, we have
Thus,
Let w be the weak solution to the problem
Note that from Proposition 2 that S is Fréchet differentiable. Thus, S is Gâteaux differentiable and
That is,
By computation, we have
Take to obtain
Take to obtain
Since is the minimum point of in , it holds
□
By standard argument [6], we know the following corollary from Theorem 4.
Corollary 4.
Theorem 5.
When T is small enough, the optimality system
has at most one solution.
Proof.
From Corollary 1, for , satisfies
From Lemma 2, satisfies and
where C is independent of T. Let
Then, is the solution to the following system:
where , ,
It follows from (3) and (87) that and
where C is a constant independent of T. Let
where is to be determined. Then, z is the weak solution to the problem
and q is the weak solution to the problem
From Lemma 2 , we have , . Since z is the weak solution to problems (92)–(94), we have for any , the following equality holds
Take to obtain
Take to obtain
It follows from (88), (90), (98), (99) and the Hölder inequality that
where C is a constant independent of T and . Note that, from (86), we have
For , we have
Thus, , a.e. in . That is , , a.e. in .
The proof is complete. □
5. A Numerical Experiment
In this section, we give an experiment to find a solution of (7) by the necessary condition. For convenience, we deal with the optimal control problem governed by the linear degenerate equation in one dimension. Precisely, for the optimal control problem
where the admissible control set is
and y is the solution to the following problem
Let be the solution of (103) and be the solution of problems (104)–(106) with . From Theorem 3, the solution of (103) can be formulated as
where is the solution of the adjoint problem
Here, we adopt the algorithm used in [21].
Numerical Algorithm
Step 1. Take .
Step 2. For , we employ the finite difference method to obtain the solution to problems (104)–(106) with and the solution to problems (107)–(109) with . In this process, we partition the spatial domain for x uniformly into 20 intervals, and the temporal domain for t uniformly into 8000 intervals.
Step 3. Take .
Step 4. If , then set and return to Step 2. Else, stop the program and output the current values and as the approximations of and , respectively.
The iteration number converges to 8. The resulting optimal control and the corresponding optimal state are presented in Figure 1 and Figure 2, respectively.
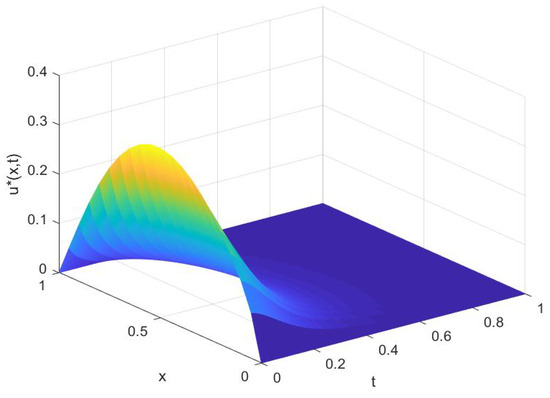
Figure 1.
Optimal control .
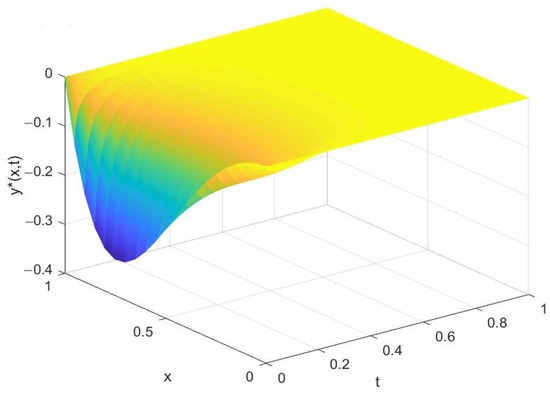
Figure 2.
Optimal State .
6. Conclusions
In this paper, we were concerned with the optimal control problem governed by the nonlinear degenerate parabolic equations in multi-dimensional space. Firstly, we proved the existence of the solutions to the optimal control problems governed by the nonlinear degenerate parabolic equations. Secondly, we derived the first-order necessary condition for the linear case and prove the global uniqueness of the optimal control. Thirdly, we derived the first order necessary condition for the nonlinear case and prove the local uniqueness of the optimal control. Finally, we showed a numerical example to rigorously substantiate the validity and applicability of the theoretical outcomes presented herein. Our work provides a research approach for the optimal control problem of degenerate parabolic equations. In the future, there are many topics we will consider regarding the optimal control problems of degenerate parabolic equations, such as the optimal control problem of degenerate parabolic equations with convection terms, the optimal control problem of coupled degenerate parabolic equations, and the optimal boundary control problem of degenerate parabolic equations.
Author Contributions
Conceptualization, Y.N. and R.D.; methodology, R.D.; investigation, Y.N. and Y.Z.; writing—original draft preparation, T.M. and Y.Z.; writing—review and editing, Y.N. and R.D.; funding acquisition, R.D. and Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Natural Science Foundation of Jilin Province (20220101033JC), the National Natural Science Foundation of China (12071067), the National Natural Science Foundation of China (12161045, 12026219, 41701054).
Data Availability Statement
No data were used to support the findings of this study.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
References
- Baranovskii, E.S. Feedback optimal control problem for a network model of viscous fluid flows. Math. Notes 2022, 112, 26–39. [Google Scholar] [CrossRef]
- Baranovskii, E.S. Optimal control for steady flows of the Jeffreys fluids with slip boundary condition. J. Appl. Ind. Math. 2014, 8, 168–176. [Google Scholar] [CrossRef]
- Hu, W.; Lai, M.J.; Lee, J. Optimal control for suppression of singularity in chemotaxis via flow advection. Appl. Math. Optim. 2024, 89, 57. [Google Scholar] [CrossRef]
- Casas, E.; Kunisch, K. Infinite horizon optimal control problems for a class of semilinear parabolic equations. SIAM J. Control Optim. 2022, 60, 2070–2094. [Google Scholar] [CrossRef]
- Casas, E.; Yong, J. Optimal control of a parabolic equation with memory. ESAIM COCV 2023, 29, 23. [Google Scholar] [CrossRef]
- Tröltzsch, F. Optimal Control of Partial Differential Equations: Theory, Methods, and Applications; American Mathematical Society: Providence, RI, USA, 2010; Volume 112. [Google Scholar]
- Lions, J.L. Optimal Control of Systems Governed by Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 1971. [Google Scholar]
- Cannarsa, P.; Martinez, P.; Vancostenoble, J. Null controllability of degenerate heat equations. Adv. Differ. Equ. 2005, 10, 153–190. [Google Scholar] [CrossRef]
- Jiang, L.S.; Tao, Y.S. Identifying the volatility of underlying assets from option prices. Inverse Problems 2001, 17, 137–155. [Google Scholar]
- North, G.R.; Howard, D.; Pollard, D.; Wielicki, B. Variational formulation of Budyko-Sellers climate models. J. Atmos. Sci. 1979, 36, 255–259. [Google Scholar] [CrossRef][Green Version]
- Deng, Z.; Yang, L. An inverse problem of identifying the radiative coefficient in a degenerate parabolic equation. Chin. Ann. Math. Ser. B 2014, 35, 355–382. [Google Scholar] [CrossRef]
- Lenhart, S.M.; Yong, J. Optimal control for degenerate parabolic equations with logistic growth. Nonlinear Anal. 1995, 25, 681–698. [Google Scholar] [CrossRef]
- Marinoschi, G.; Mininni, R.M.; Romanelli, S. An optimal control problem in coefficients for a strongly degenerate parabolic equation with interior degeneracy. J. Optim. Theory Appl. 2017, 173, 56–77. [Google Scholar] [CrossRef]
- Cannarsa, P.; Martinez, P.; Vancostenoble, J. Carleman estimates for a class of degenerate parabolic operators. SIAM J. Control Optim. 2008, 47, 1–19. [Google Scholar] [CrossRef]
- Du, R. Null controllability for a class of degenerate parabolic equations with the gradient terms. J. Evol. Equ. 2019, 19, 585–613. [Google Scholar] [CrossRef]
- Wang, C. Approximate controllability of a class of semilinear systems with boundary degeneracy. J. Evol. Equ. 2010, 10, 163–193. [Google Scholar] [CrossRef]
- Wang, C.; Du, R. Approximate controllability of a class of semilinear degenerate systems with convection term. J. Differ. Equ. 2013, 254, 3665–3689. [Google Scholar] [CrossRef]
- Wang, C.; Du, R. Carleman estimates and null controllability for a class of degenerate parabolic equations with convection terms. SIAM J. Control Optim. 2014, 52, 1457–1480. [Google Scholar] [CrossRef]
- Yin, J.; Wang, C. Evolutionary weighted p-Laplacian with boundary degeneracy. J. Differ. Equ. 2007, 237, 421–445. [Google Scholar] [CrossRef]
- Casas, E.; Fernández, L.A. Distributed Control of Systems Governed by a General Class of Quasinlinear Elliptic Equations. J. Differ. Equ. 1993, 104, 20–47. [Google Scholar] [CrossRef]
- Stojanovic, S. Optimal damping control and nonlinear elliptic systems. SIAM J. Control Optim. 1991, 29, 594–608. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).