Abstract
This paper discusses the application of the orthogonal collocation on finite elements (OCFE) method using quadratic and cubic B-spline basis functions on partial differential equations. Collocation is performed at Gaussian points to obtain an optimal solution, hence the name orthogonal collocation. The method is used to solve various cases of Burgers’ equations, including the modified Burgers’ equation. The KdV–Burgers’ equation is considered as a test case for the OCFE method using cubic splines. The results compare favourably with existing results. The stability and convergence of the method are also given consideration. The method is unconditionally stable and second-order accurate in time and space.
MSC:
65L10; 65M70; 65N35
1. Introduction
Collocation methods have been preferred to other numerical methods, such as the finite difference and Galerkin methods, because they are simple and easy to implement, the evaluation of integrals is not required, their collocation matrix has a small band width [1] and they yield global approximations. Spline collocation employs a linear combination of piecewise polynomials called spline basis functions to solve differential equations. Using a B-spline representation, the basis functions do not show spurious oscillations as do higher-order polynomial approximations [2]. Improvements on approximations with B-splines have been made through partitioning the required intervals into smaller intervals called finite elements [3]. A unique property of orthogonal collocation on finite elements (OCFE) is that the nodes are roots of orthogonal polynomials [4]. OCFE often yields optimal approximate solutions; hence, the application of spline collocation on each element taking Gaussian points as nodes is an example of OCFE. This method has been used to solve various problems in the literature, e.g., Burgers’ equation, the KdV equation and so on.
Burgers’ equation is a popular nonlinear time-dependent partial differential equation which describes different physical phenomena. It is the simplified form of the famous Navier–Stokes equation in fluid dynamics [1]. It is an important mathematical model that has applications in fluid dynamics, the theory of shock waves, elasticity, heat conduction and traffic flow [1]. It has known exact solutions in the literature. Many numerical methods have been applied to solve Burgers’ equation. The list includes the homotopy perturbation method [5], the homotopy analysis method [6], finite difference [7], the Adomian decomposition method [8,9], spline collocation [1] and the variational iteration method [10], just to mention a few.
The authors in [11] examined optimal error bounds for cubic spline interpolation. In [12], a cubic B-spline collocation method to solve convection–diffusion equations with different Dirichlet boundary conditions was discussed. The authors concluded that their method was unconditionally stable and compared favourably with earlier results in the literature. A detailed analysis and application of orthogonal spline collocation (OSC) to partial differential equations and initial-boundary value problems (IBVPs) was presented in [13]. A numerical scheme to solve Burgers’ equation using quintic Hermite spline collocation on finite elements was proposed in [1]. Cubic B-spline collocation on finite elements was used to obtain the solution of Burgers’ equation in [14]. A modified cubic spline quadrature method was used to solve Burgers’ equation in [15]. The modification produced a diagonally dominant coefficient matrix, which is also tridiagonal and easily solved using the Thomas algorithm. Reference [16] discussed the convergence analysis of orthogonal spline collocation for Burgers’ equation using the extrapolated Crank–Nicholson method for discretization in time. It was found that the error at every time step is of order two in time and in space for splines whose degree is . In [17], a Dirichlet biharmonic problem was approximated via the quadratic spline collocation method. An extensive review of the properties and application of B-splines to fluid dynamics was discussed in [2]. Similarly, the author of [4] reviewed the development of the method of weighted residuals and showed the equivalence of orthogonal collocation, the pseudospectral method and the differential quadrature method. Paper [18] discussed the approximate solutions of ordinary differential equations of any order using collocation at Gaussian points together with the global error associated with the solution. It was shown in [19] that the quadratic spline collocation method performed better than cubic splines in terms of the accuracy of the numerical solution of two-point boundary value problems when collocating at equally spaced points. Based on the quadratic spline basis, [20] solved the regularized long-wave equation. In addition, [3] applied collocation based on quintic Hermite basis functions on finite elements at Gaussian points to solve third-order ordinary differential equations and time-dependent partial differential equations.
Burgers’ equation has received much attention to the extent that the generalized form of Burgers’ equation is now being considered. The modified Burgers’ equation has applications in ion reflection at quasi-perpendicular shocks, transport of pollutants and nonlinear waves in a medium with low-frequency absorption [21]. It has been studied by many researchers applying different methods to obtain its numerical solutions. Burgers’ equation and the modified Burgers’ equation were examined in [22] using the sextic B-spline collocation approach. The authors in [21] provided error bounds for septic Hermite splines with orthogonal collocation. They applied quasilinearization and the Crank–Nicolson method for time integration to achieve an unconditionally stable scheme. A second-order exponential time differencing scheme was used by [23] to solve Burgers’ equation and its modified form. A discussion on quintic spline collocation for the modified Burgers’ equation was carried out in [24], while [25] examined the modified Burgers’ equation using the quintic B-spline collocation method.
Of great interest is the Korteweg–de Vries–Burgers’ (KdVB) equation, which consists of both KdV and Burgers’ equations. It has applications in modelling shallow water waves and nonlinear systems due to the presence of dispersion and damping terms [26]. The He’s variational iteration method was used in [27] to obtain the solution of the KdVB equation. Among others who have worked on the KdVB equation are [26,28], who applied quintic B-spline collocation and the Adomian decomposition (ADM) method, respectively. The work by the authors of [29] compared the solutions of KdVB using the finite difference and Adomian decomposition methods. In [30], the exact travelling wave solution of the KdVB equation was studied, and that of a compound KdV–Burgers’ equation was presented in [31] using the homogeneous balanced method. It was suggested in [31] that some particular variations of the KdV–Burgers’ equation can be solved using the homogeneous balance method. Exact solutions to the KdV–Burgers’ equation were constructed in [32] using two different methods, one of which is based on the series approach and is typically an extension of Hirota’s method. In [33], both KdV and KdV–Burgers’ equations were solved using the modified tanh–coth method, and new multiple travelling wave solutions were obtained. The work in paper [34] showed that the new multiple solutions obtained in [33] were actually not new but transformed known solutions of the KdV and KdV–Burgers’ equations. A new approach to solve the extended KdV equation was discussed in [35] via the Galerkin finite element method with quintic B-spline functions as weight functions.
In this paper, we propose the OCFE method using quadratic and cubic B-splines and quasilinearization. Subsequently, the OCFE method is applied to solve Burgers’ equation and the modified Burgers’ and KdV–Burgers’ equations. The main advantages of the proposed method as compared to other methods mentioned above are as follows: (1) there is no need to solve large nonlinear systems of equations; (2) the boundary conditions are enforced strongly, so there is no need to introduce fictional points (knots) or additional equations; (3) the solution values are readily available at the grid points; (4) the OCFE method yields better convergence rates than the classical B-spline collocation method; and (5) the OCFE method can be adapted to dynamically track the profile of rapidly varying transients using an adaptive grid (placing more elements) where the solution is changing rapidly. However, we do not pursue the latter here.
The arrangement of the remaining sections of this paper are as follows: we describe quadratic spline collocation in Section 2 and Section 3; application of quadratic B-spline collocation to Burgers’ equation is discussed in Section 4; a linearization approach to fix errors arising from temporal variations and nonlinearity of Burgers’ equation is presented in Section 5; stability of the method is considered in Section 6; convergence of the method is discussed in Section 7; and numerical examples and simulations for Burgers’ equation are given in Section 8. In Section 9, the OCFE method is applied to the modified Burgers’ equation, and the numerical results are reported in Section 10. Section 11, Section 12 and Section 13 are dedicated to using the OCFE method, employing cubic B-splines to solve the KdV–Burgers’ equation. In Section 14, we treat a special case of Kdv–Burgers’ equation that has no exact solution. Finally, Section 15 concludes the paper.
2. B-Spline Basis
Consider a non-decreasing sequence of knots,
Each B-spline curve has the form where is the constant and is a normalized basis function. The order of the basis function is k, and the degree of the polynomial is . Some properties of B-spline curves are listed below
- is a polynomial of degree on .
- .
- The sum of the basis functions are identical unity or .
- Each on .
- Each basis function has one maximum value, except in the case of .
In order to calculate the basis functions, we need the knot vectors, which are usually written as where denotes the number of knots. There are three types of knot vectors: (1) uniform knots, which are evenly spaced; (2) non-uniform knots, which are irregularly spaced; and (3) open uniform knots. The multiplicities of the knots at the ends are equal to the order of the basis, and the knots are equally spaced. We shall consider only the third type and only two distinct knots. Once the knots have been chosen, the basis is calculated using the Cox–de Boor recursion formula [18],
Here, for the recursion to work, we adopt the notation
3. Quadratic Basis and Orthogonal Collocation on Finite Elements
In this case, , and we use the knots . The multiplicity at the end points 0 and 1 is three, and there are two distinct knots.
From the recursion Formula (2), it is evident that in order to determine , we require as well as From the definition of , it follows that and in . One can also confirm from the recurrence relation that and . Hence, the recurrence relation gives
We observed that if we expand using the binomial theorem, then we can recover the quadratic basis , where k is the order of the spline. Let , , , where we have dropped the subscript.
For ease of explanation of the OCFE method, we solve a second-order ODE given via
with the boundary conditions
Suppose we partition the interval into N elements with nodes given via , , where is the uniform step size. The transformation maps the interval to . The collocation solution in interval i and interval is respectively assumed to be and To enforce continuity at internal boundaries, we write
Then, for each element i, we may write
Discretization of (3) into finite elements, and substitution of (8) in (3) together with (4), yields
and
Equation (9) contains unknowns; hence, we require conditions. In order to achieve this, we use one collocation point per element, namely in (9), which, together with the two boundary conditions and continuity equations from (7), results in a closed linear system of the form . The coefficient matrix A has the form
and vector of unknowns , where T represents the transpose and
Numerical Example
The exact solution is given via
Table 1 belowshows the order of convergence using the OCFE method and the classical collocation method using quadratic splines studied in [19]. As expected, the OCFE method converges faster than the classical quadratic spline collocation method.

Table 1.
Orderof Convergence.
Here, the order of convergence is given via where is the error vector at the nodes.
We study the OCFE method in greater detail in the following sections. We begin with the application of the OCFE method to Burgers’ equation.
4. Application to Burgers’ Equation
Consider Burgers’ equation
with the boundary conditions
and initial condition
For a partial differential equation (PDE) in space and time, we write the trial solution as
The boundary conditions (15) (for simplicity, choosing ) yield
Equations (18) and (19) give a system of differential-algebraic equations (DAEs) which has to be solved in time. Unfortunately, for large N, solving this system could prove to be computationally challenging. A common alternative used in the literature, which avoids dealing with DAEs, is to use the Crank–Nicolson method with quasi-linearization to accomplish time integration. Furthermore, the stability and convergence of the method is easily established. In the next section, we apply the quasilinearization method to Burgers’ equation.
5. Application of Quazilinearization to Burgers’ Equation
Applying linearization and the trapezoid rule to Burgers’ equation yields
Substituting one collocation point per interval for z in Equation (22) and using the boundary conditions will give a system of equations of the form
6. Stability of the Quadratic B-Spline Collocation Method
The von Neumann analysis technique is used to determine the stability of a numerical method for linear initial value problems and linearized nonlinear boundary value problems.
Let be a local constant representing u in the nonlinear term of Equation (14), and use the Crank–Nicolson method for discretization. We have
where is the time step. Suppose and . We have
Since
Equation (24) can be written as
Then, at the collocation point ,
where
Let , k= mode and , then (27) gives
where , , , and It is easy to show that . This shows that orthogonal quadratic spline collocation on finite elements using Gauss points for Burgers’ equation is unconditionally stable.
7. Convergence of the Method
We assume that the exact solution of Equation (14) is , where and are initial and final times, respectively. From the trapezoid rule, the local error is given using
Let be the exact solution of (20), and assume that At time , the global error is for constant . Hence
for some constants
We let , then Equation (20) becomes
We assume that Let be the collocation solution to (31), where denotes polynomials of degree < 3. From de Boor [18],
and
We now show that the collocation matrix system of Equation (31) has a unique solution for any number of finite elements N. The resulting coefficient matrix is a square matrix of the order . It may be shown using elementary row and column operations that the coefficient matrix is equivalent to a block upper triangular matrix. Hence the determinant can be deduced to be given via (see Appendix A).
where
The matrix is non-singular if and . In this case, a unique solution to the system of equations exists. Hence, the method converges to the solution.
8. Numerical Examples and Simulations for Burgers’ Equation
In this section, we consider various examples and present various numerical simulations to demonstrate the efficiency of the OCFE method.
- 1.
The boundary conditions are and . Results of our method are presented in Table 2, Table 3 and Table 4 when the number of partitions of the space interval [0, 1] is , the number of time steps is and the final time is .
Table 2.
Error norms at
Table 3.
Invariant at
Table 4.
Comparison of at some points
In Table 2, the present results performed better than those of Raslan [36], since both the and the norm values are better. It is also clear from the table that the norm of the present work is better than that of the Crank–Nicolson method (CN) based on [36].
The CN based on [36] performed better than Raslan [36], as shown in the table. Hence, both CN and the present method, quadratic B-spline collocation using Gauss points on finite elements, compare favourably.
In Table 3, the invariants for the present work, Raslan [36] and CN based on [36] are compared and found to agree with one another.
Exact solutions of for some values of x are compared in Table 4. The Table shows that the present method converges to the exact solution faster than that of Raslan [36].
In Figure 1, a 3D plot of the exact solution is overlaid onto that of the approximate solution of Burgers’ equation in example 1. It is evident that the approximate and exact solutions match perfectly on the computational domain. Furthermore, in Figure 2, the convergence of the different methods and the CPU times for Raslan [36], the Crank–Nicolson method based on Raslan, and quadratic spline collocation on Gauss points for computation of this example are shown. It is clear that the OCFE method has order-two convergence, and the present method is the fastest of the three methods and nearly five times faster than Raslan [36] and four times faster than CN.
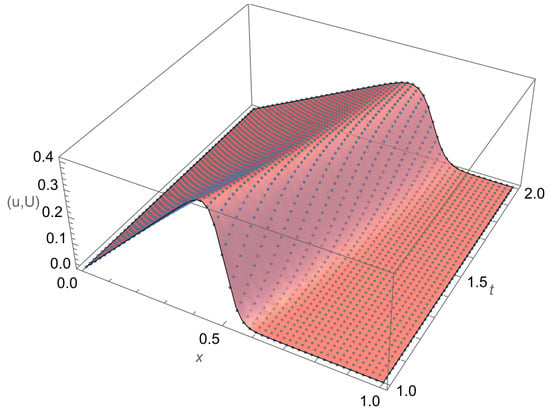
Figure 1.
3D Plot:
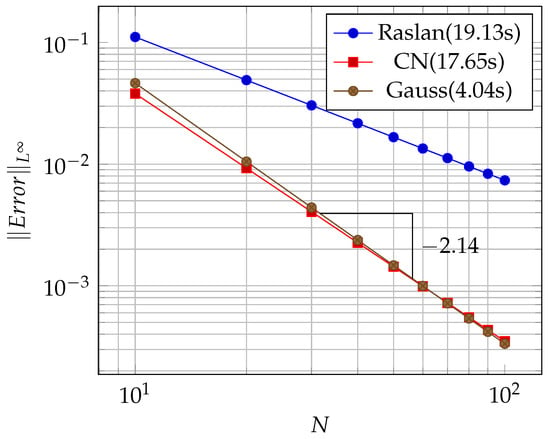
Figure 2.
Convergence plot.
- 2.
- A travelling wave solution of Burgers’ Equation (14), which is of the formwith the initial conditionand the boundary conditions , where , and are constants, is considered. We compare the norms of the errors at various times when the number of partitions of the space interval [0, 1] is , the number of time steps is and the final time is . Figure 3 shows the profiles at some values of t for all x. The graph of the exact solution is overlaid onto that of the approximate solution in Figure 4. The exact and approximate solutions match perfectly on the computational domain. It is clearly shown in Figure 5 that our method has convergence order two and is three times faster than CN.
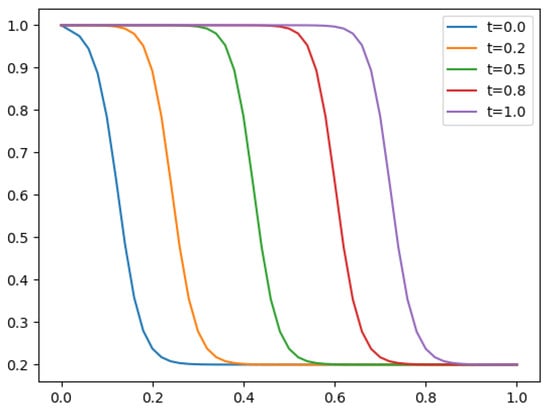 Figure 3. Final profiles at different times when
Figure 3. Final profiles at different times when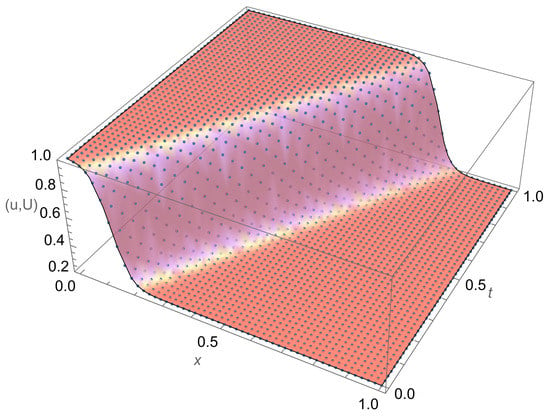 Figure 4. 3D plot:
Figure 4. 3D plot: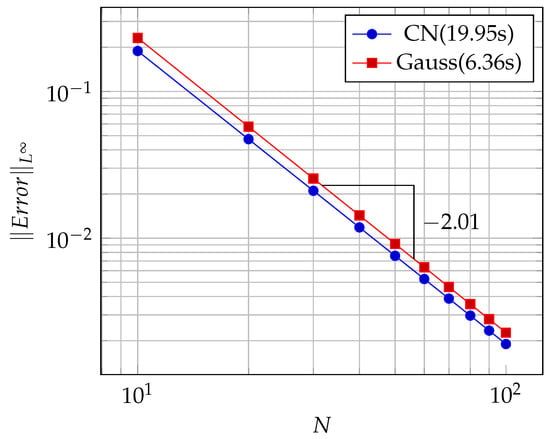 Figure 5. Convergence plot.
Figure 5. Convergence plot.
9. Modified Burgers’ Equation
We apply the OCFE method with a quadratic basis to the modified Burgers’ equation [21,22,23,25]
Consider the case of , with the initial condition
and boundary conditions
The exact solution is
To simplify the work further, we apply the trapezoidal rule in time, linearize the nonlinear term of Equation (40) and substitute (21) in (40):
The boundary conditions become
10. Numerical Simulations for the Modified Burgers’ Equation
A 3D plot of the numerical solution and error for are given in Figure 6 and Figure 7, respectively. The orthogonal collocation of finite elements based on quadratic B-spline basis functions gives good results when compared with the exact solution of the modified Burgers’ equation as shown in Figure 7.
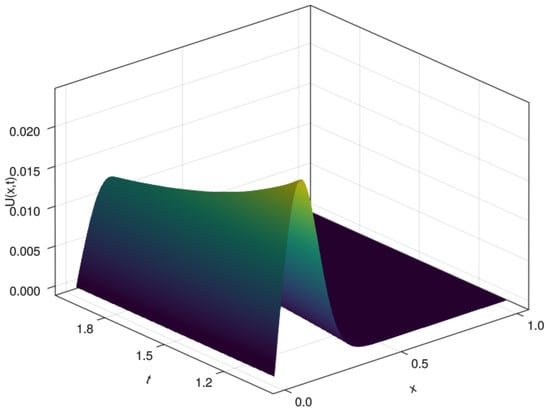
Figure 6.
3D plot of approximated
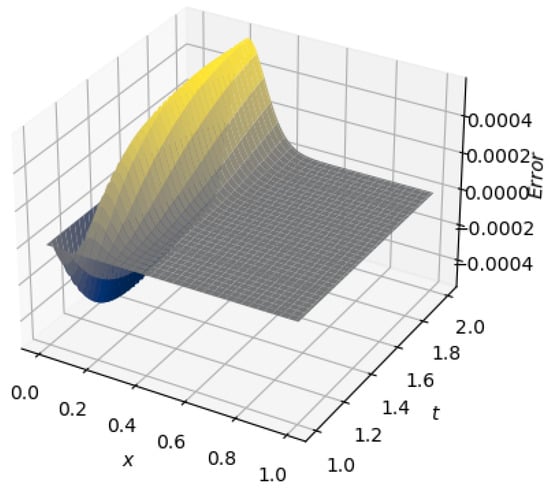
Figure 7.
3D plot of error.
In Figure 8, Figure 9 and Figure 10, time profiles of the solution are shown for various values of and N. It is seen that the OCFE method is capable of tracking the shock propagation of the solution for extremely small values of and moderate values of N.
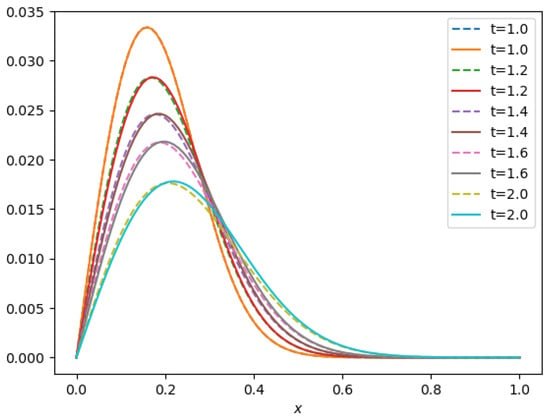
Figure 8.
Shock propagation and .
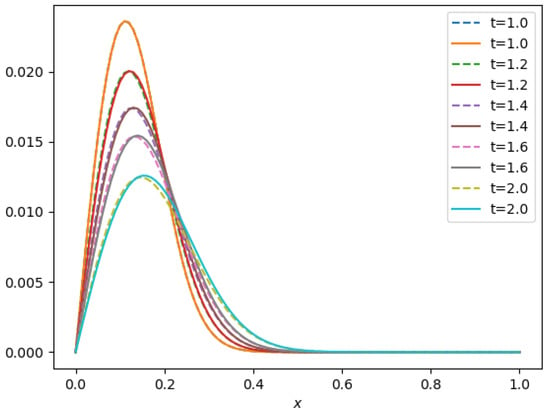
Figure 9.
Shock propagation and .
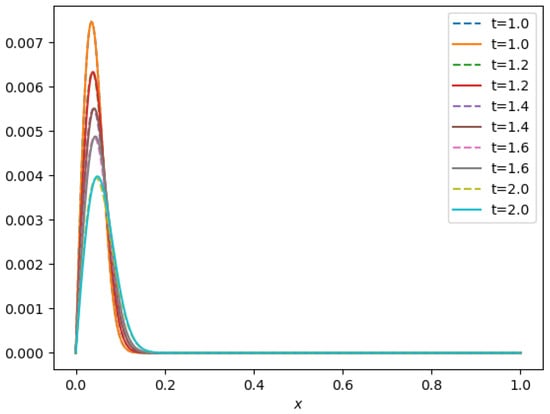
Figure 10.
Shock propagation and .
In the previous sections, we applied quadratic B-splines in conjunction with finite elements (OCFE method) to solve second-order PDEs. It is seen that the OCFE method using quasilinearization is optimal in efficiency for solving Burgers’ and modified Burgers’ equations. In particular, there is no need to impose additional boundary conditions, and the method matches the second-order method used for time integration. Hence, the overall method is second-order in space and time. In the next section, we present the cubic splines OCFE method and demonstrate it’s efficiency for solving third-order PDEs and focus on the KdV–Burgers’ equation. Various numerical experiments are performed to demonstrate the suitability of the cubic B-splines OCFE method.
11. Cubic B-Splines
A spline of order , which is a linear combination of third-degree polynomial bases, is called a cubic B-spline. Hence, the required cubic B-spline basis are
Let
Consider solving a linear differential equation in one spatial variable x on . Suppose the interval is partitioned into N finite elements. For every element , we transform x into via
such that
on the ith element. We now require continuity at the internal boundaries such that
This implies that the boundary conditions and become
Therefore, we can write
Substitute (60) into the differential equation, evaluate at the collocation point together with Equations (55), (56), (58) and (59) to get a linear system of equations that contain unknowns. The solution of this system will be used to compute the solution to the differential equation. The solution at nodes is given via
12. Application of the Cubic B-Spline OCFE Method to KdV–Burgers’ Equation
The third-order KdV–Burgers’ equation [27] combines KdV [24] and Burgers’ equations. As an example, we consider
with the exact solution
the initial condition
and the boundary conditions
obtained directly from the exact solution when Equation (61) becomes
The linearized version of (65) is
13. Numerical Simulations for KdV–Burgers’ Equation
A 3D plot of the numerical solution is depicted in Figure 11. The error is shown for various values of . It is seen that the OCFE method using cubic splines produces a highly accurate solution for moderate values of N. This shows that this method gives a good approximation of the exact solution.
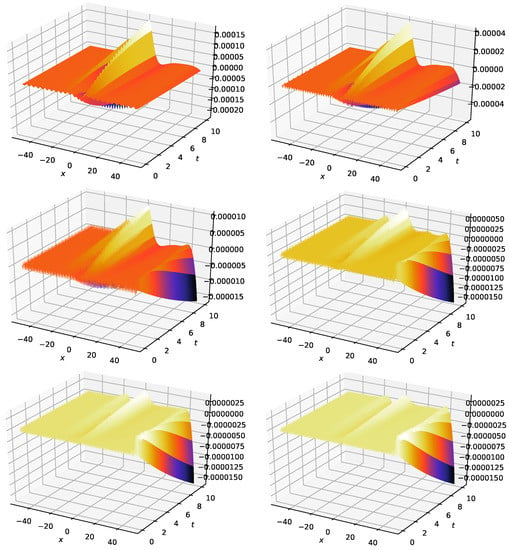
Figure 11.
3D plot of error of KdV–Burgers when (top: left to right), (middle: left to right) and (bottom: left to right).
14. A Case of KdV–Burgers’ Equation That Does Not Have an Exact Solution
In this section, a case of the KdV–Burgers’ equation whose exact solution is not known in the literature is considered. We use , and with the initial condition [28]
and boundary conditions
We solve the problem using the OCFE method with and compare the solution with the results obtained using the Mathematica v13.1 NDSolve built-in solver. We note that the value of is much smaller than the value of used in [28]. The results are presented graphically in Figure 12 and Figure 13.
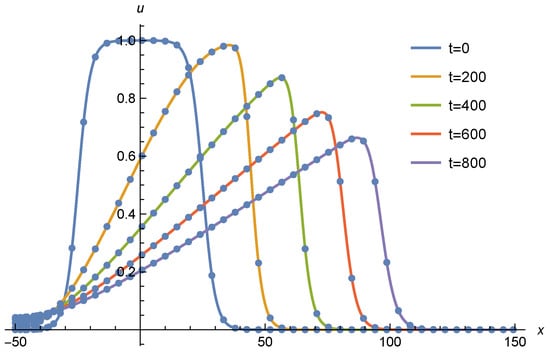
Figure 12.
Comparison of OCFE solution (dots) and Mathematica built-in solver (solid line) at different times.
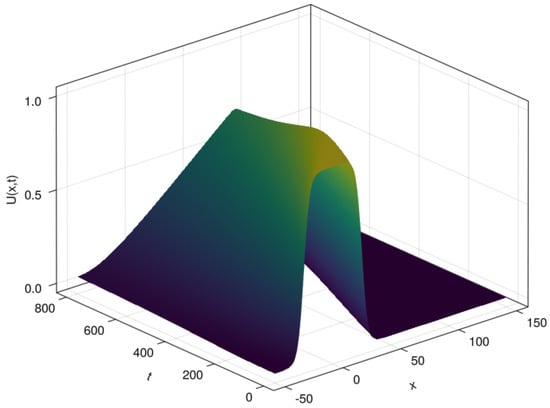
Figure 13.
3D plot for
The results in Figure 12 demonstrate that the OCFE method produces results which match the solution produced in Mathematica very closely.
15. Conclusions
We used the orthogonal collocation on finite elements method with quadratic B-spline and cubic spline bases to solve partial differential equations. In particular, Burgers’ equation was extensively explored to show the effectiveness of the method. It is easy to implement, unconditionally stable and convergent. Our results performed better than earlier results based on other forms of quadratic splines in the literature. We also demonstrated that the OCFE method is suitable for solving modified Burgers’ and KdV–Burgers’ equations.
In addition, a travelling wave solution of Burgers’ equation was considered in order to show the applicability of OCFE based on a quadratic B-spline basis. Velocity profiles were examined at various times and found to be consistent with existing results in the literature. Furthermore, we extended the OCFE method to cubic B-spline basis functions for solving third-order PDEs. This required two extra sets of equations to ensure that our solution is second-order continuously differentiable and requires three boundary conditions to solve the resulting system of linear equations. This method is suitable for differential equations of orders one to three and was used to find the solution of the KdV–Burgers’ equation. The approximate solution is highly accurate to second-order, both in time and space.
In conclusion, we found that orthogonal collocation based on quadratic and cubic B-spline bases performed well and produced accurate results that are second-order in time and space.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to the anonymous referees and editor for their constructive comments.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Expand the determinant about the last and second-to-last rows, successively, to obtain , where is the submatrix with the first column, last column and last two rows deleted. Let P be the even permutation matrix given via , where are the standard basis vectors in .
Let
where is the identity matrix.
Row reduce by letting , to obtain
where T is the tridiagonal matrix with on the super diagonal, on the diagonal, and on the subdiagonal.
Let ; then, it is easy to show that
with and
Let in (A1), then
Thus
with
Solution of (A3) and (A4) using Crammer’s rule yields
Equation (A2) becomes
Since and , it follows from (A5) that
Thus
Now
References
- Arora, S.; Kaur, I.; Tilahun, W. An exploration of quintic Hermite splines to solve Burgers’ equation. Arab. J. Math. 2020, 9, 19–36. [Google Scholar] [CrossRef]
- Botella, O.; Shariff, K. B-spline methods in fluid dynamics. Int. J. Comput. Fluid Dyn. 2003, 17, 133–149. [Google Scholar] [CrossRef]
- Singh, P.; Parumasur, N.; Bansilal, C. Orthogonal collocation on finite elements Using quintic Hermite basis. Aust. J. Math. Anal. Appl. 2021, 18, 1–12. [Google Scholar]
- Young, L.C. Orthogonal collocation revisited. Comput. Methods Appl. Mech. Engrg. 2019, 345, 1033–1076. [Google Scholar] [CrossRef]
- Biazar, J.; Ghazvini, H. Exact solutions for nonlinear Burgers’ equation by homotopy perturbation method. Numer. Methods Partial Differ. Equ. 2009, 25, 833–842. [Google Scholar] [CrossRef]
- Inc, M. On numerical solution of Burgers’ equation by homotopy analysis method. Phys. Lett. A 2008, 372, 356–360. [Google Scholar] [CrossRef]
- Hassanien, I.A.; Salama, A.A.; Hosham, H.A. Fourth-order finite difference method for solving Burgers’ equation. Appl. Math. Comput. 2005, 170, 781–800. [Google Scholar] [CrossRef]
- Zeidan, D.; Chau, C.K.; Lu, T.T.; Zheng, W.Q. Mathematical studies of the solution of Burgers’ equations by Adomian decomposition method. Math. Methods Appl. Sci. 2020, 43, 2171–2188. [Google Scholar] [CrossRef]
- Abbasbandy, S.; Darvishi, M.T. A numerical solution of Burgers’ equation by modified Adomian method. Appl. Math. Comput. 2005, 163, 1265–1272. [Google Scholar] [CrossRef]
- Moghimi, M.; Hejazi, F.S. Variational iteration method for solving generalized Burgers’–Fisher and Burgers’ Equations. Chaos Solit. Fractals 2007, 33, 1756–1761. [Google Scholar] [CrossRef]
- Hall, C.A.; Meyer, W.W. Optimal error bounds for cubic spline interpolation. J. Approx. Theory 1976, 16, 105–122. [Google Scholar] [CrossRef]
- Mittal, R.C.; Jain, R.K. Redefined cubic B-splines collocation method for solving convection–diffusion equations. Appl. Math. Model. 2012, 36, 5555–5573. [Google Scholar] [CrossRef]
- Bialecki, B.; Fairweather, G. Orthogonal spline collocation method for partial differential equations. J. Comput. Appl. Math. 2001, 128, 55–82. [Google Scholar] [CrossRef]
- Ali, A.H.A.; Gardner, G.A.; Gardner, L.R.T.A. Collocation Solution for Burgers’ Equation Using Cubic B-Spline Finite Elements. Comput. Methods Appl. Mech. Eng. 1992, 100, 325–337. [Google Scholar] [CrossRef]
- Arora, G.; Singh, B.K. Numerical solution of Burgers’ equation with modified cubic B-spline differential quadrature method. Appl. Math. Comput. 2013, 22, 166–177. [Google Scholar] [CrossRef]
- Bialecki, B.; Fisher, N. Maximum norm convergence analysis of extrapolated Crank-Nicolson orthogonal spline collocation for Burgers’ equation in one space variable. J. Differ. Equ. Appl. 2018, 24, 1621–1642. [Google Scholar] [CrossRef]
- Bialecki, B.; Fairweather, G.; Karageorghis, A.; Maack, J. A quadratic spline collocation method for the Dirichlet biharmonic problem. Numer. Algorithms 2020, 83, 165–199. [Google Scholar] [CrossRef]
- De Boor, C.; Swartz, B. Collocation at Gaussian points. SIAM J. Numer. Anal. 1973, 10, 582–606. [Google Scholar] [CrossRef]
- Khalifa, A.K.A.; Eilbeck, J.C. Collocation with quadratic and cubic splines. IMA J. Numer. Anal. 1982, 2, 111–121. [Google Scholar] [CrossRef]
- Soliman, A.A.; Raslan, K.R. Collocation Method Using Quadratic B-Spline for the Rlw Equation. Int. J. Comput. Math. 2001, 78, 399–412. [Google Scholar] [CrossRef]
- Kumari, A.; Kukreja, V. Error bounds for septic Hermite interpolation and its implementation to study modified Burgers’ equation. Numer. Algorithms 2022, 89, 1799–1821. [Google Scholar] [CrossRef]
- Irk, D. Sextic b-spline collocation method for the modified Burgers’ equation. Kybernetes 2009, 38, 1599–1620. [Google Scholar] [CrossRef]
- Bratsos, A.G.; Khaliq, A.Q. An exponential time differencing method of lines for the Burgers’ and the modified Burgers’ equations. Numer. Methods Partial Differ. Equ. 2018, 34, 2024–2039. [Google Scholar] [CrossRef]
- Ramadan, M.A.; El-Danaf, T.S. Numerical treatment for the modified Burgers’ equation. Math. Comput. Simul. 2005, 70, 90–98. [Google Scholar] [CrossRef]
- Lakshmi, C.; Awasthi, A. Robust numerical scheme for nonlinear modified Burgers’ equation. Int. J. Comput. Math. 2018, 95, 1910–1926. [Google Scholar] [CrossRef]
- Kaya, D. An application of the decomposition method for the KdVb equation. Appl. Math. Comput. 2004, 152, 279–288. [Google Scholar] [CrossRef]
- Soliman, A.A. A numerical simulation and explicit solutions of KdV- Burgers’ and Lax’s seventh-order KdV equations. Chaos Solit. Fractals 2006, 29, 294–302. [Google Scholar] [CrossRef]
- Zaki, S.I. A quintic B-spline finite elements scheme for the KdVB equation. Comput. Methods Appl. Mech. Engrg. 2000, 188, 121–134. [Google Scholar] [CrossRef]
- Helal, M.; Mehanna, M.S.A. Comparison between two different methods for solving KdV–Burgers’ equation. Chaos Solit. Fractals 2006, 28, 320–326. [Google Scholar] [CrossRef]
- Demiray, H. A note on the exact travelling wave solution to the KdV–Burgers’ equation. Wave Motion 2003, 38, 367–369. [Google Scholar] [CrossRef]
- Wang, M. Exact solutions for a compound KdV-Burgers’ equation. Phys. Lett. A 1996, 213, 279–287. [Google Scholar] [CrossRef]
- Jeffrey, A.; Mohamad, M.N. Exact solutions to the KdV-Burgers’ equation. Wave Motion 1991, 14, 369–375. [Google Scholar] [CrossRef]
- Wazzan, L.A. Modified Tanh–Coth method for solving the KdV and the KdV–Burgers’ equations. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 443–450. [Google Scholar] [CrossRef]
- Kudryashov, N.A. On new travelling wave solutions of the KdV and the KdV–Burgers’ equations. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 1891–1900. [Google Scholar] [CrossRef]
- Ramadan, M.A.; Aly, H.S. New approach for solving of extended KdV Equation. AJBAS 2023, 4, 96–109. [Google Scholar] [CrossRef]
- Raslan, K.R.A. Collocation solution for Burgers’ equation using quadratic B-spline finite elements. Int. J. Comput. Math. 2003, 80, 931–938. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).