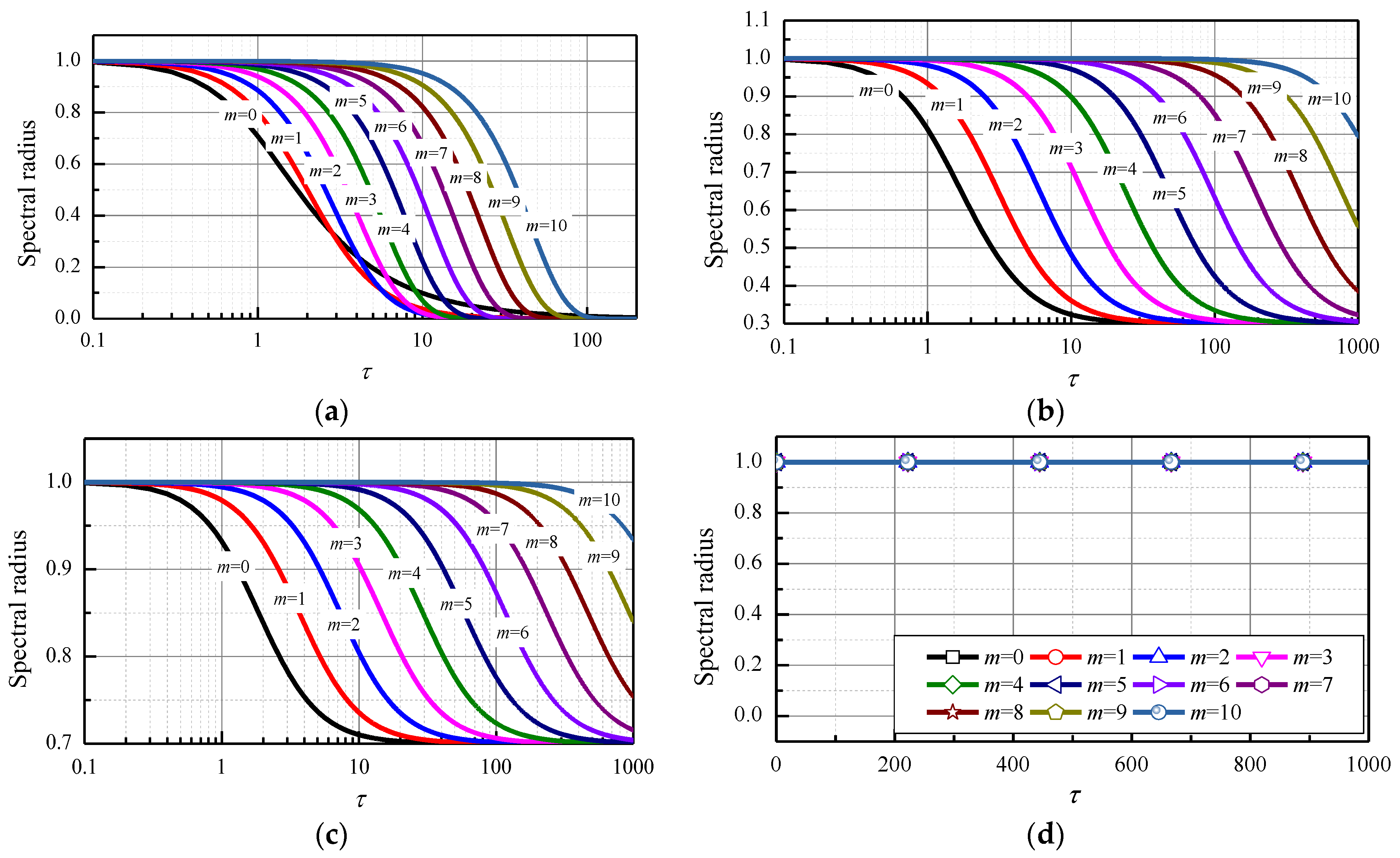
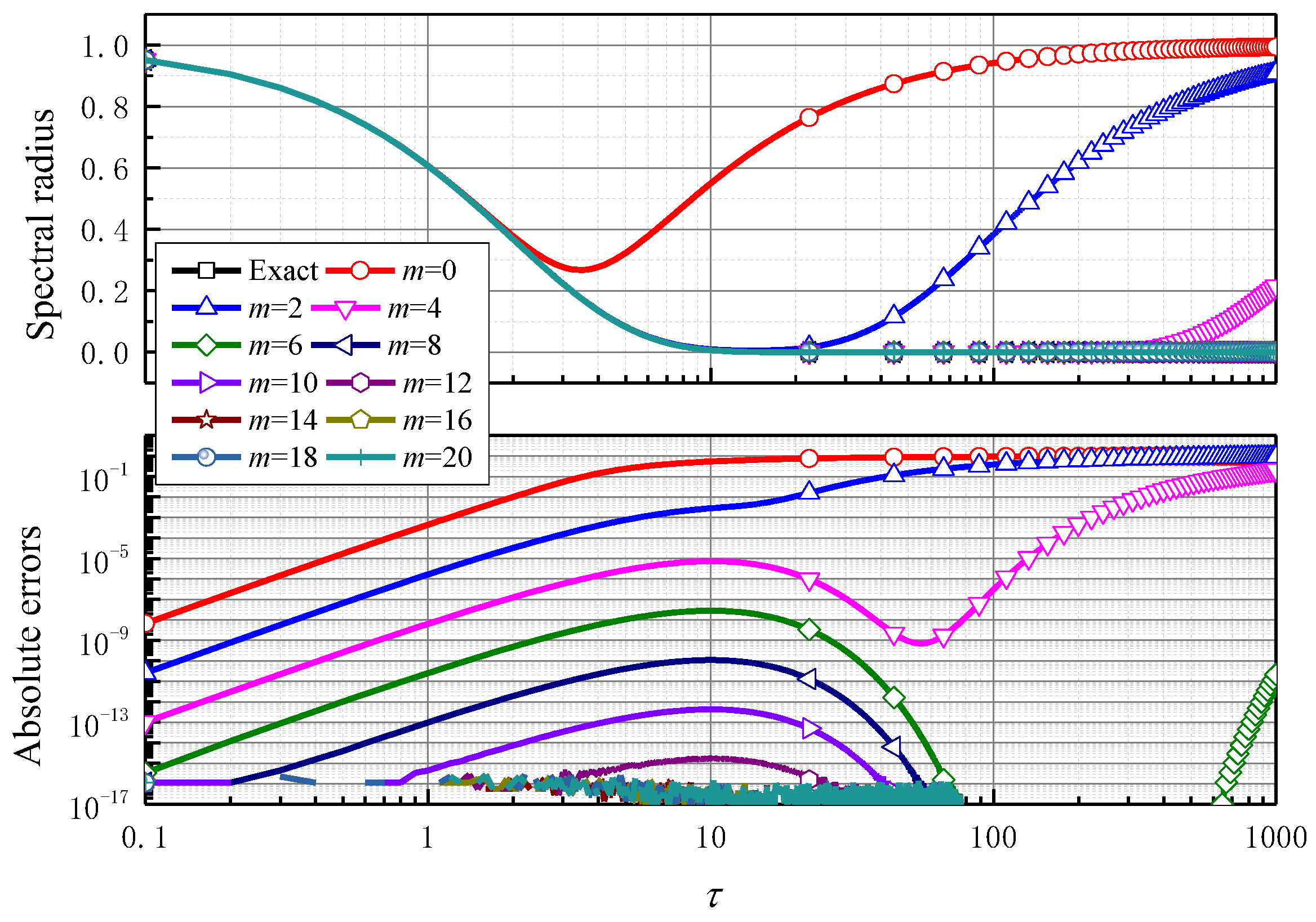
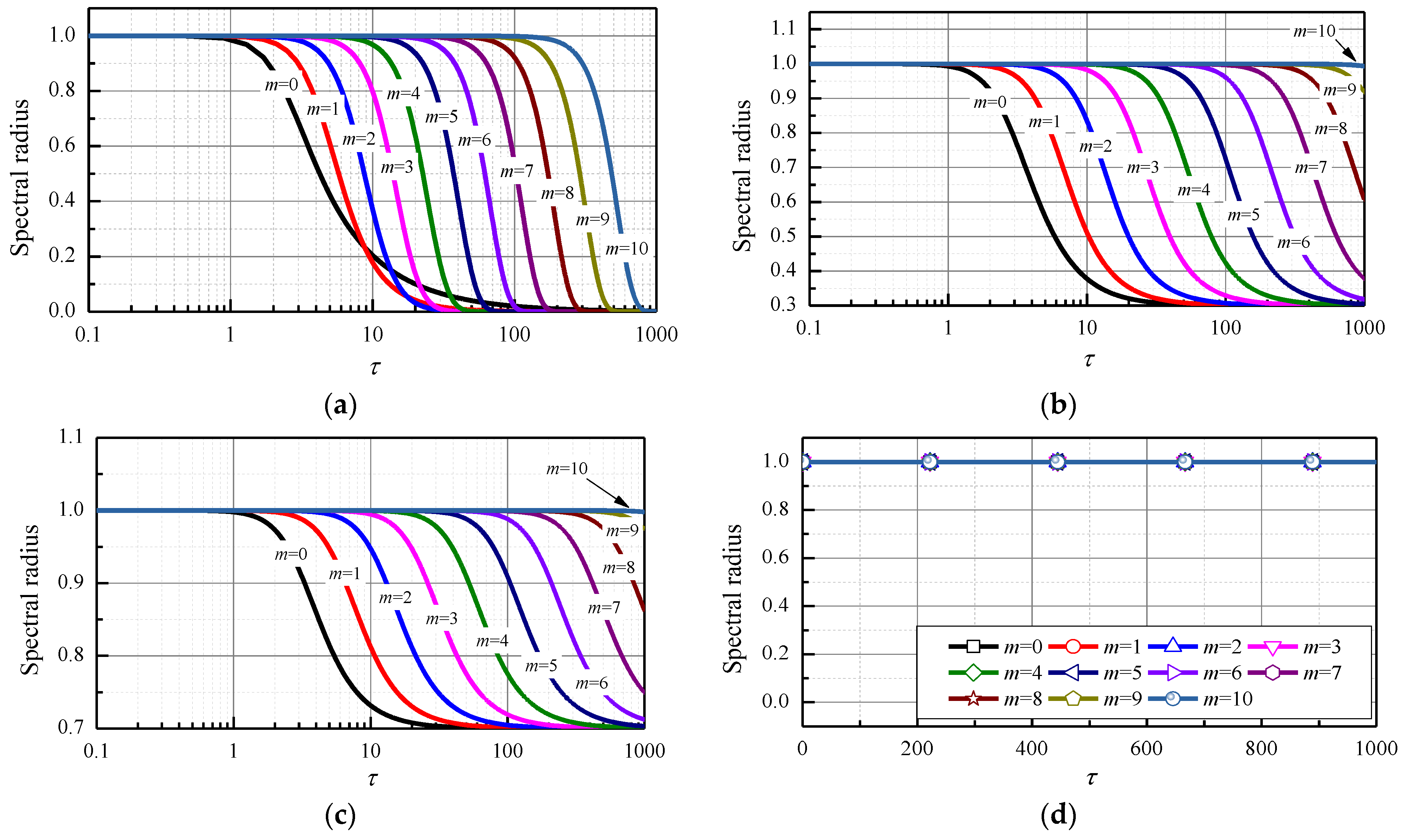
Figure 1.
Spectral radius of the AEC/DM1 versus τ for the undamped case: (a) AEDM1, ρ∞ = 0; (b) AEDM1, ρ∞ = 0.3; (c) AEDM1, ρ∞ = 0.7; and (d) AECM1, ρ∞ = 1.
Figure 1.
Spectral radius of the AEC/DM1 versus τ for the undamped case: (a) AEDM1, ρ∞ = 0; (b) AEDM1, ρ∞ = 0.3; (c) AEDM1, ρ∞ = 0.7; and (d) AECM1, ρ∞ = 1.
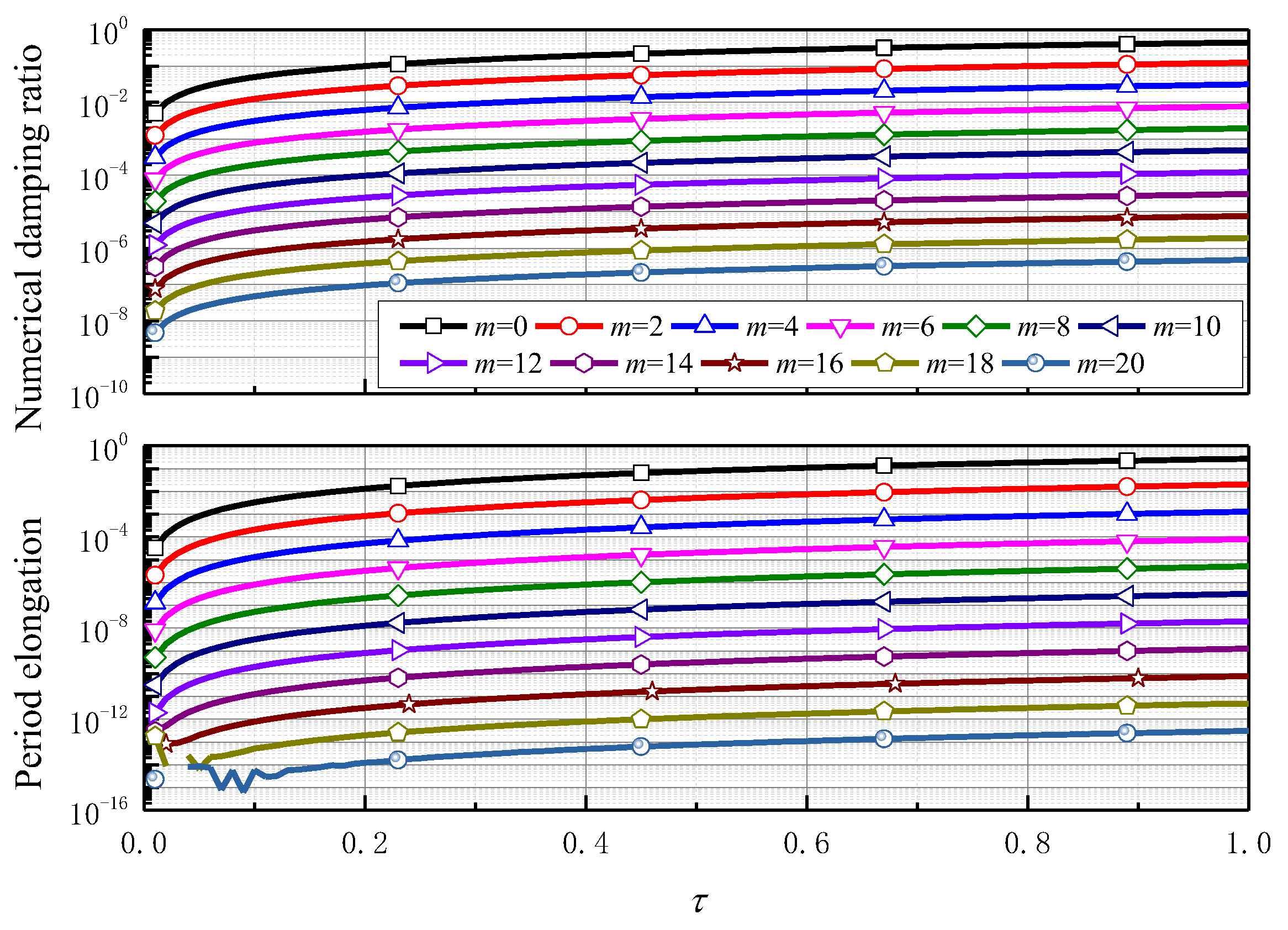
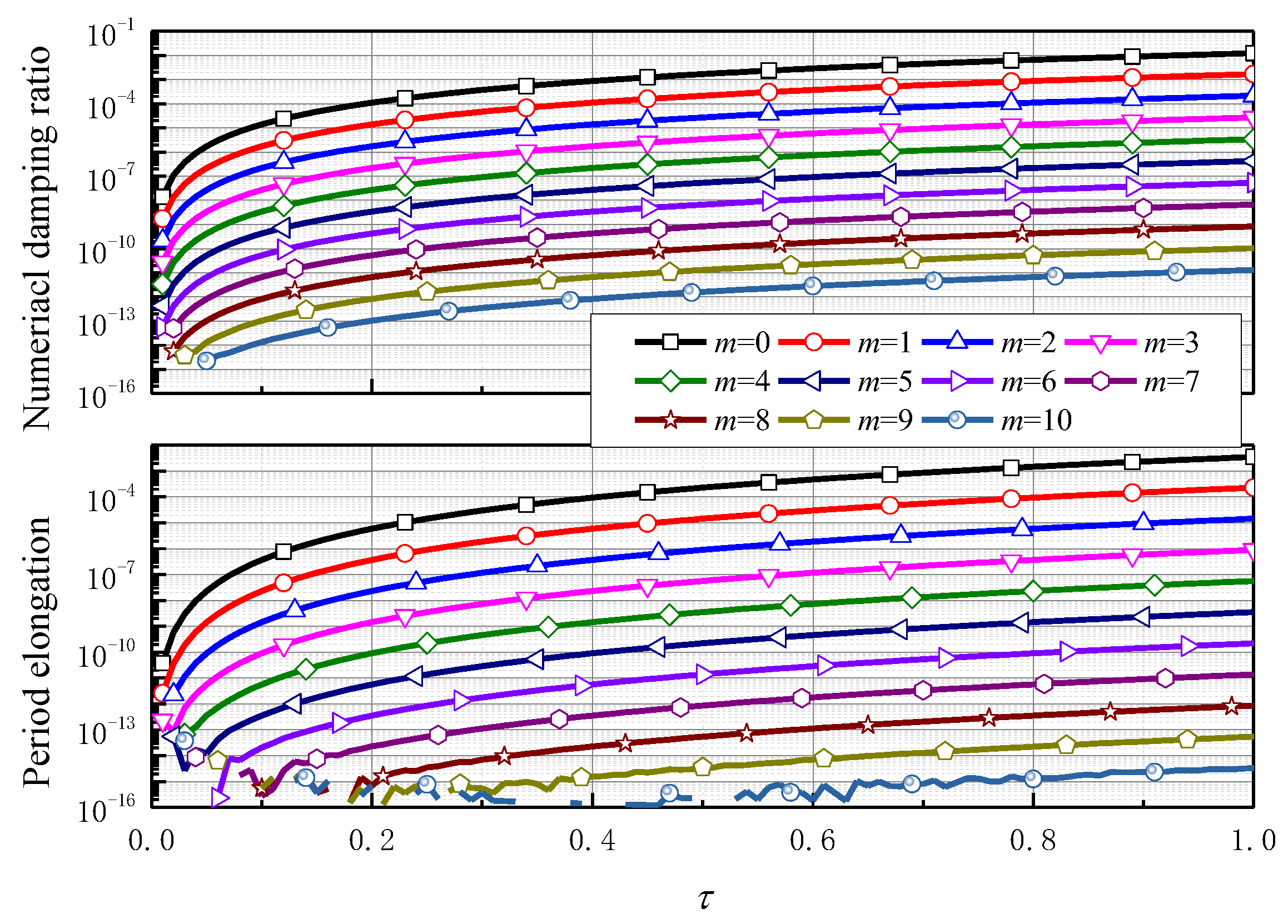
Figure 2.
Numerical damping ratio and period elongation of the AEDM1 (ρ∞ = 0) versus τ for the undamped case.
Figure 2.
Numerical damping ratio and period elongation of the AEDM1 (ρ∞ = 0) versus τ for the undamped case.
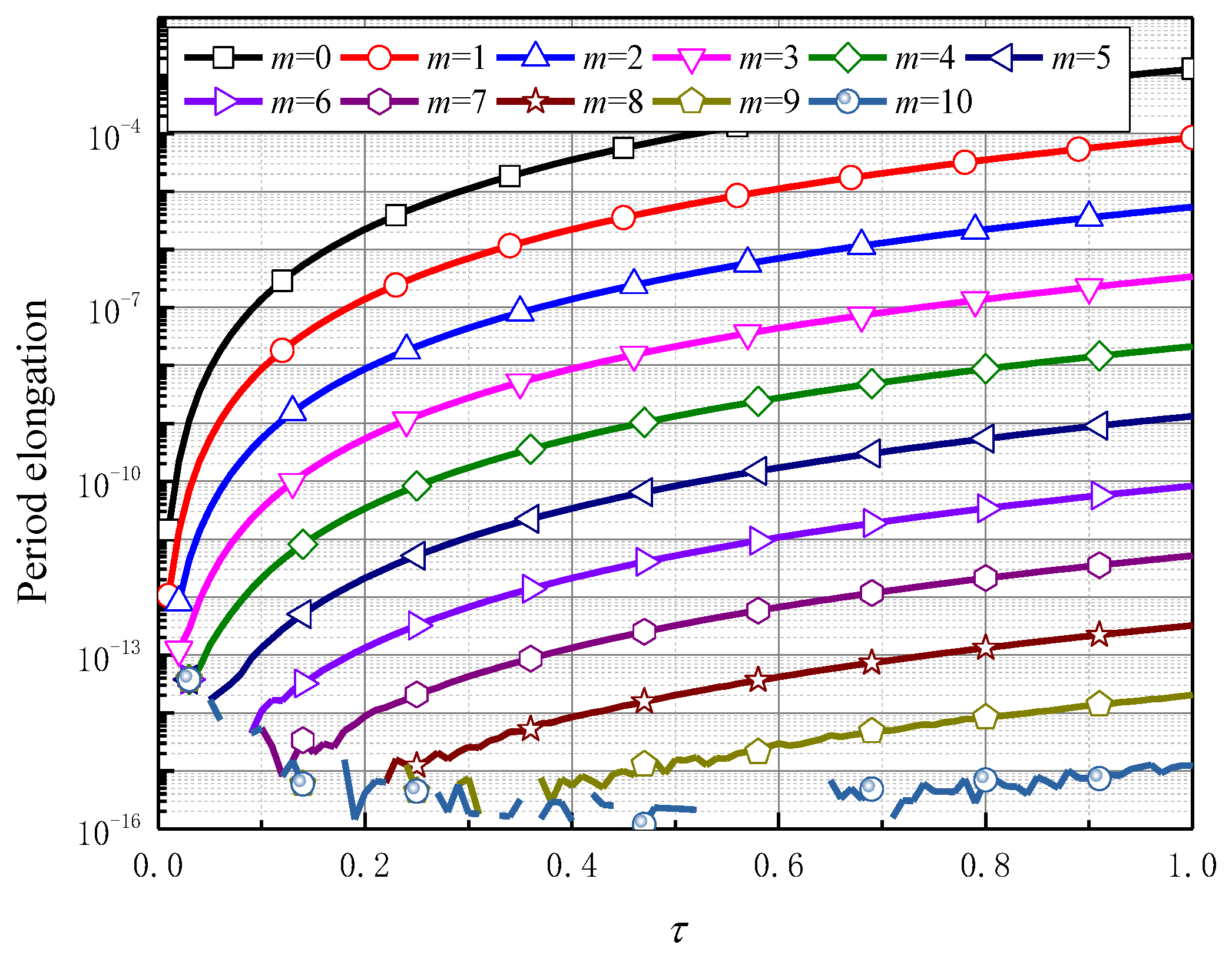
Figure 3.
Period elongation of the AECM1 (ρ∞ = 1) versus τ for the undamped case.
Figure 3.
Period elongation of the AECM1 (ρ∞ = 1) versus τ for the undamped case.
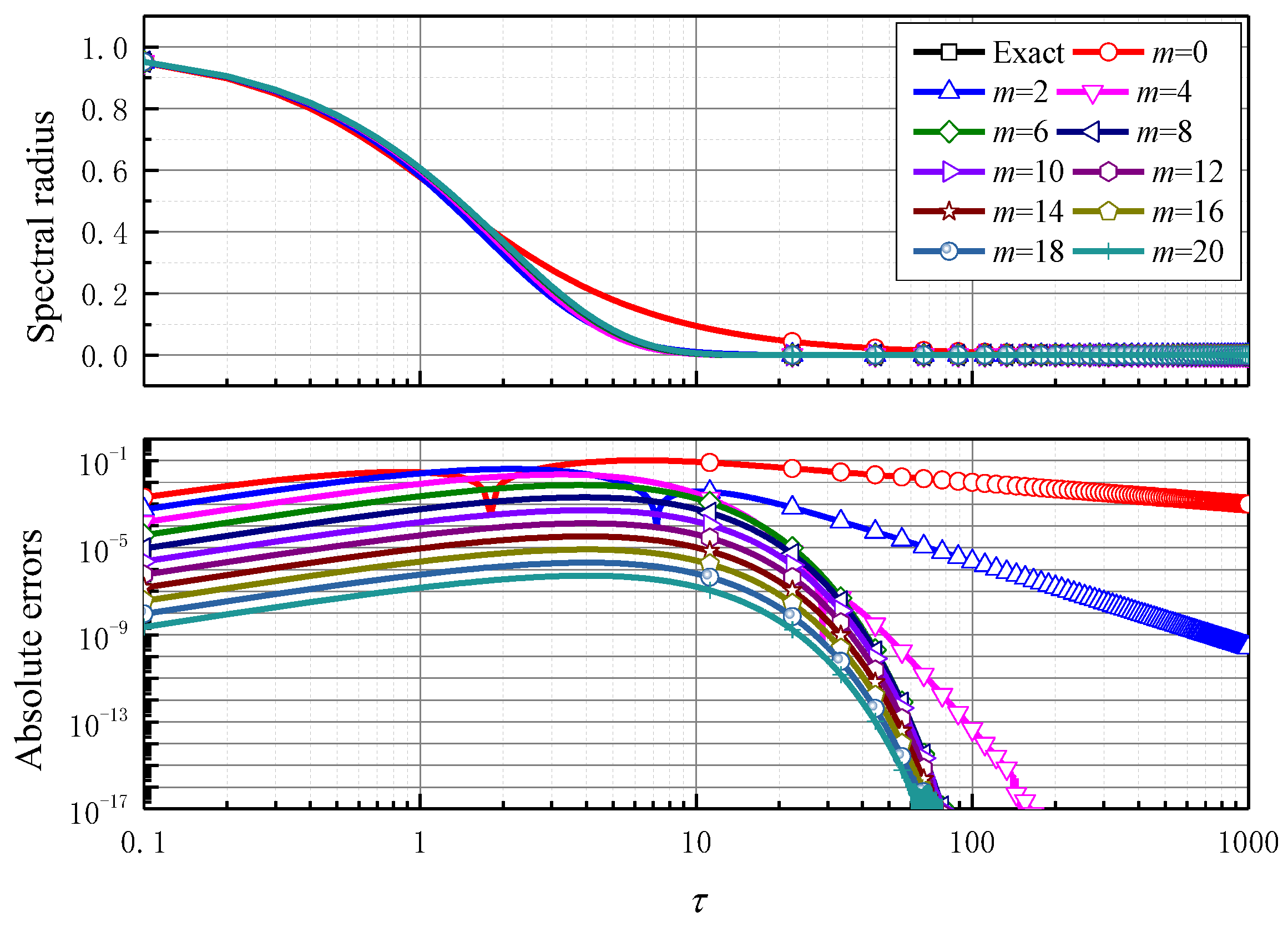
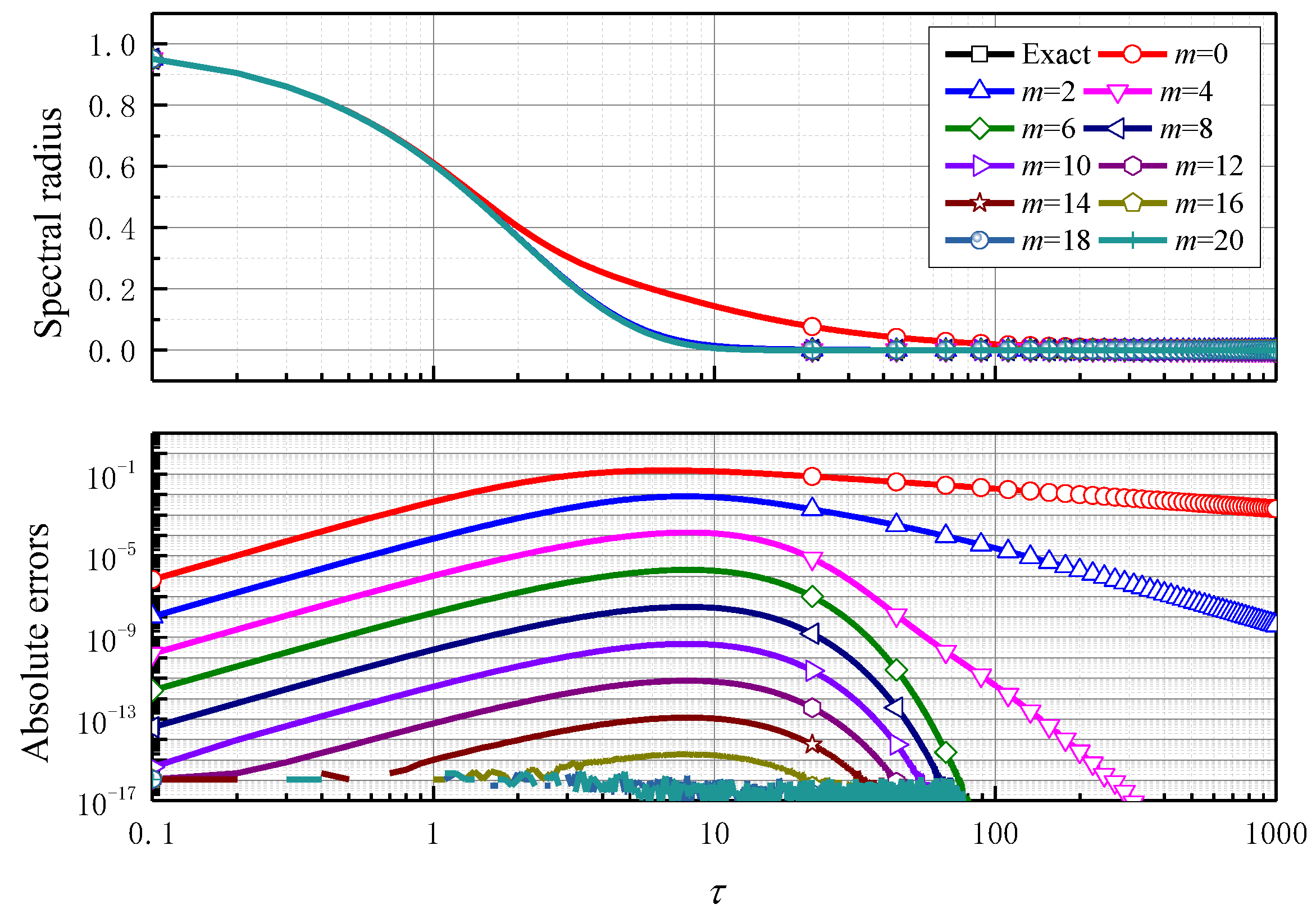
Figure 4.
Spectral radius of the AEDM1 (ρ∞ = 0) versus τ for the damped case (ξ = 0.5).
Figure 4.
Spectral radius of the AEDM1 (ρ∞ = 0) versus τ for the damped case (ξ = 0.5).
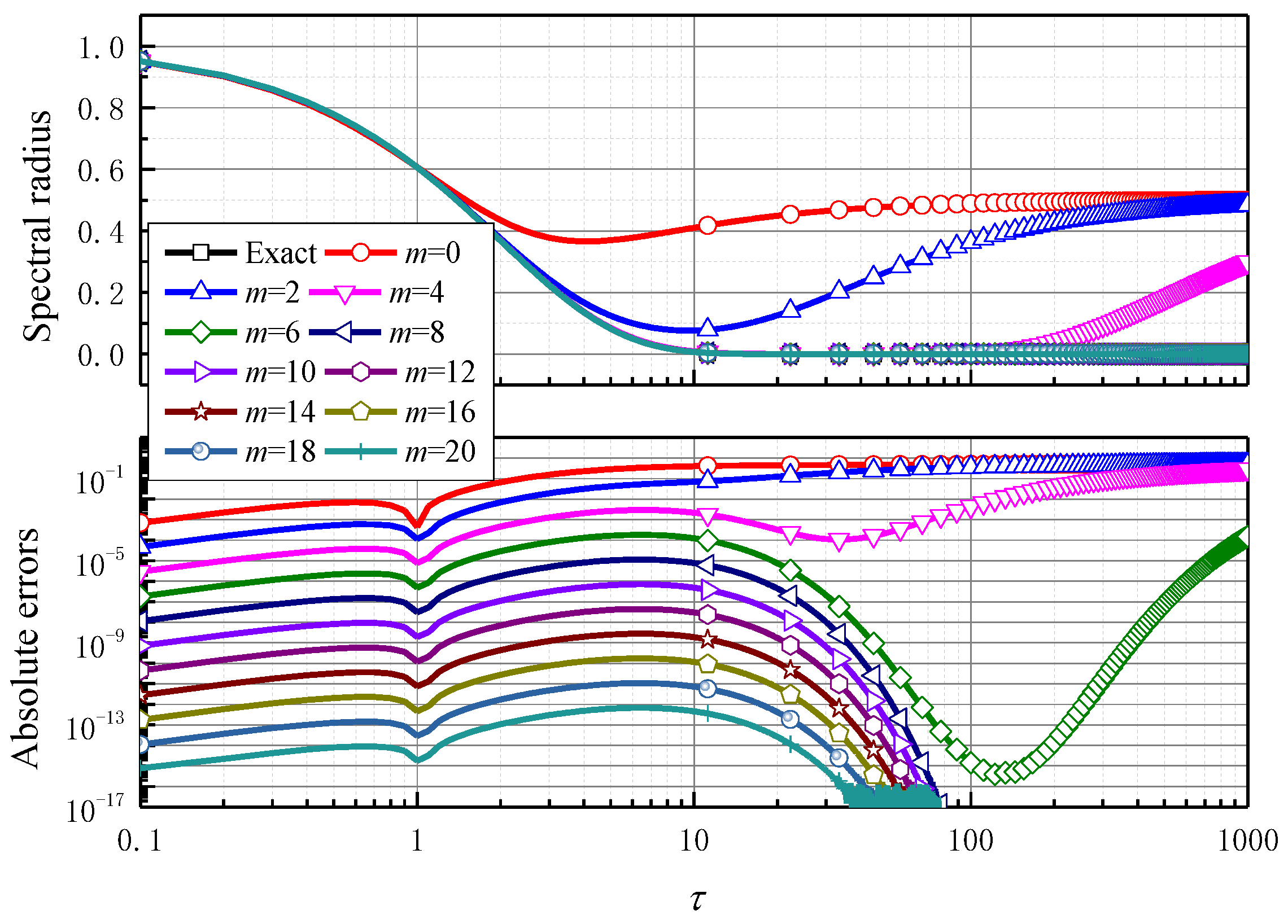
Figure 5.
Spectral radius of the AEDM1 (ρ∞ = 0.5) versus τ for the damped case (ξ = 0.5).
Figure 5.
Spectral radius of the AEDM1 (ρ∞ = 0.5) versus τ for the damped case (ξ = 0.5).
Figure 6.
Spectral radius of the AECM1 versus τ for the damped case (ξ = 0.5).
Figure 6.
Spectral radius of the AECM1 versus τ for the damped case (ξ = 0.5).
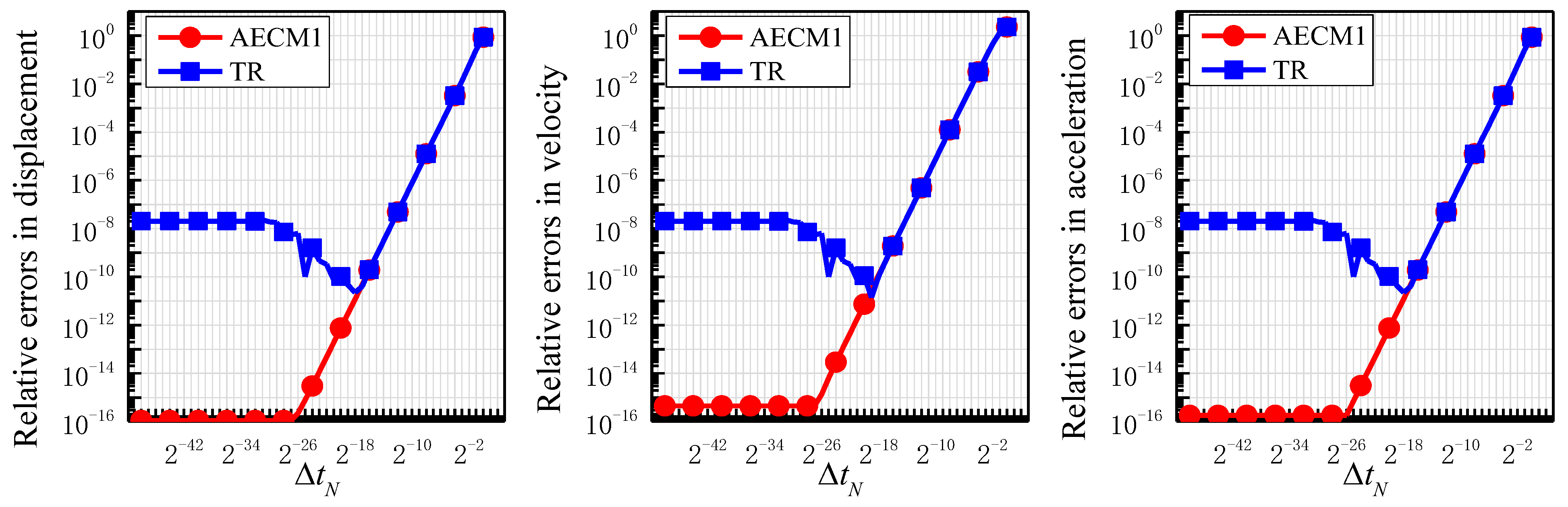
Figure 7.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 0 and f(t) = 0.
Figure 7.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 0 and f(t) = 0.
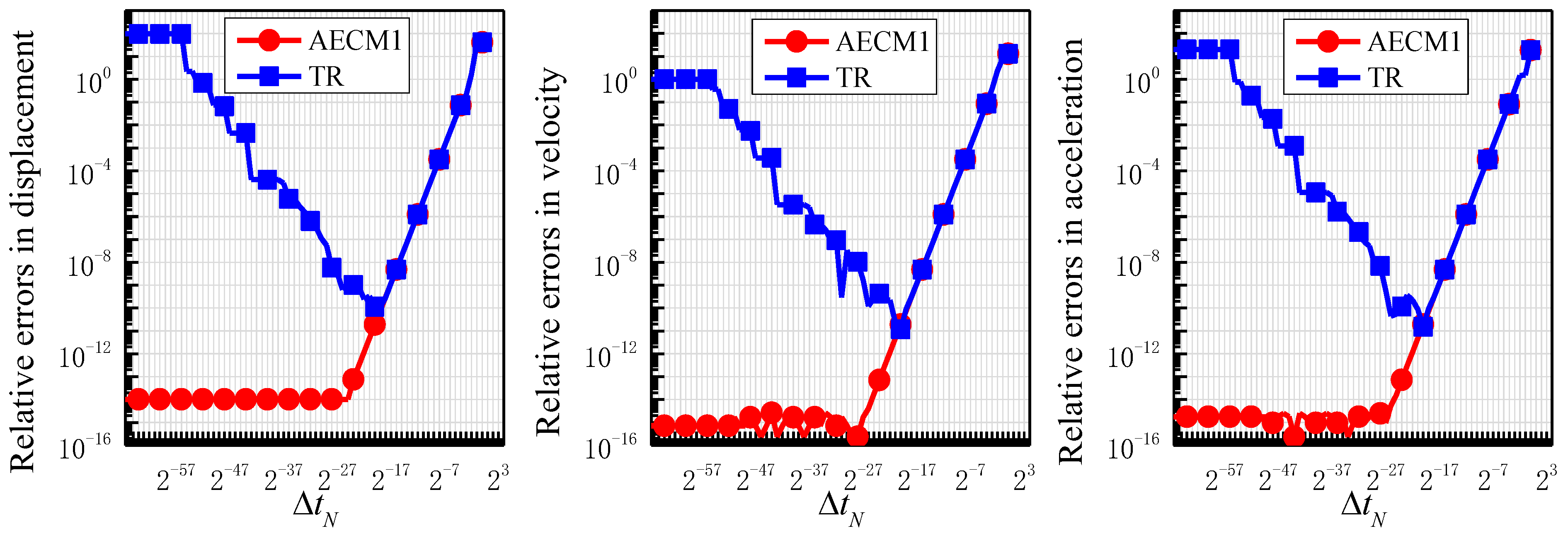
Figure 8.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 0.5 and f(t) = 0.
Figure 8.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 0.5 and f(t) = 0.
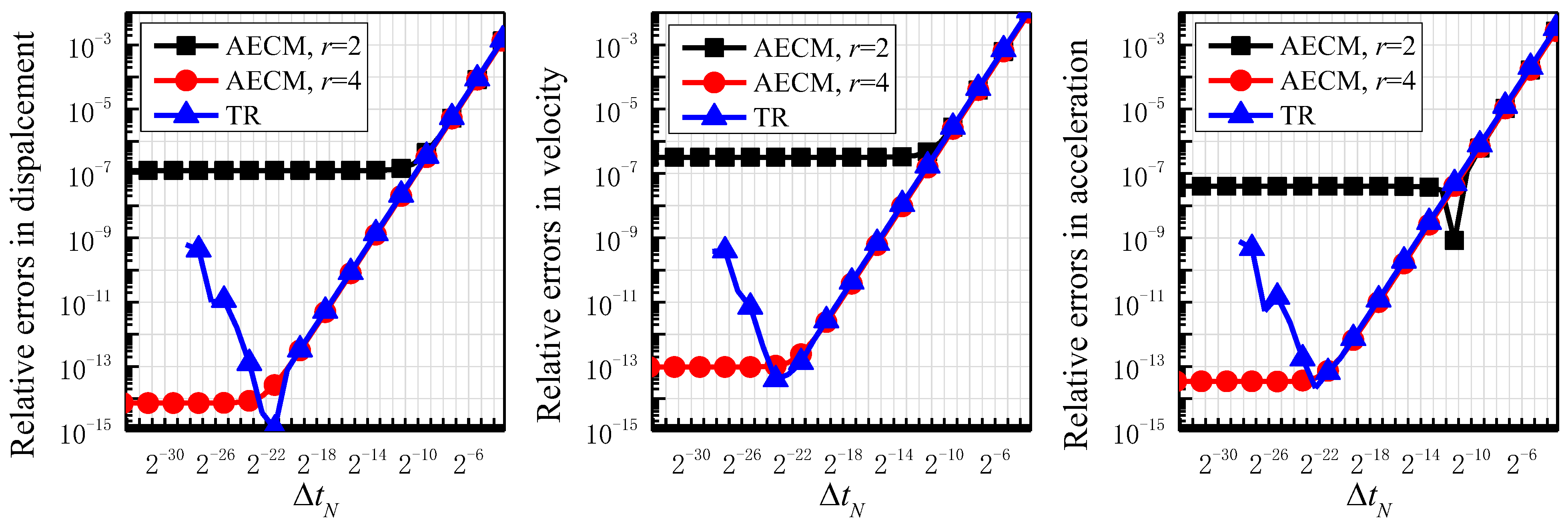
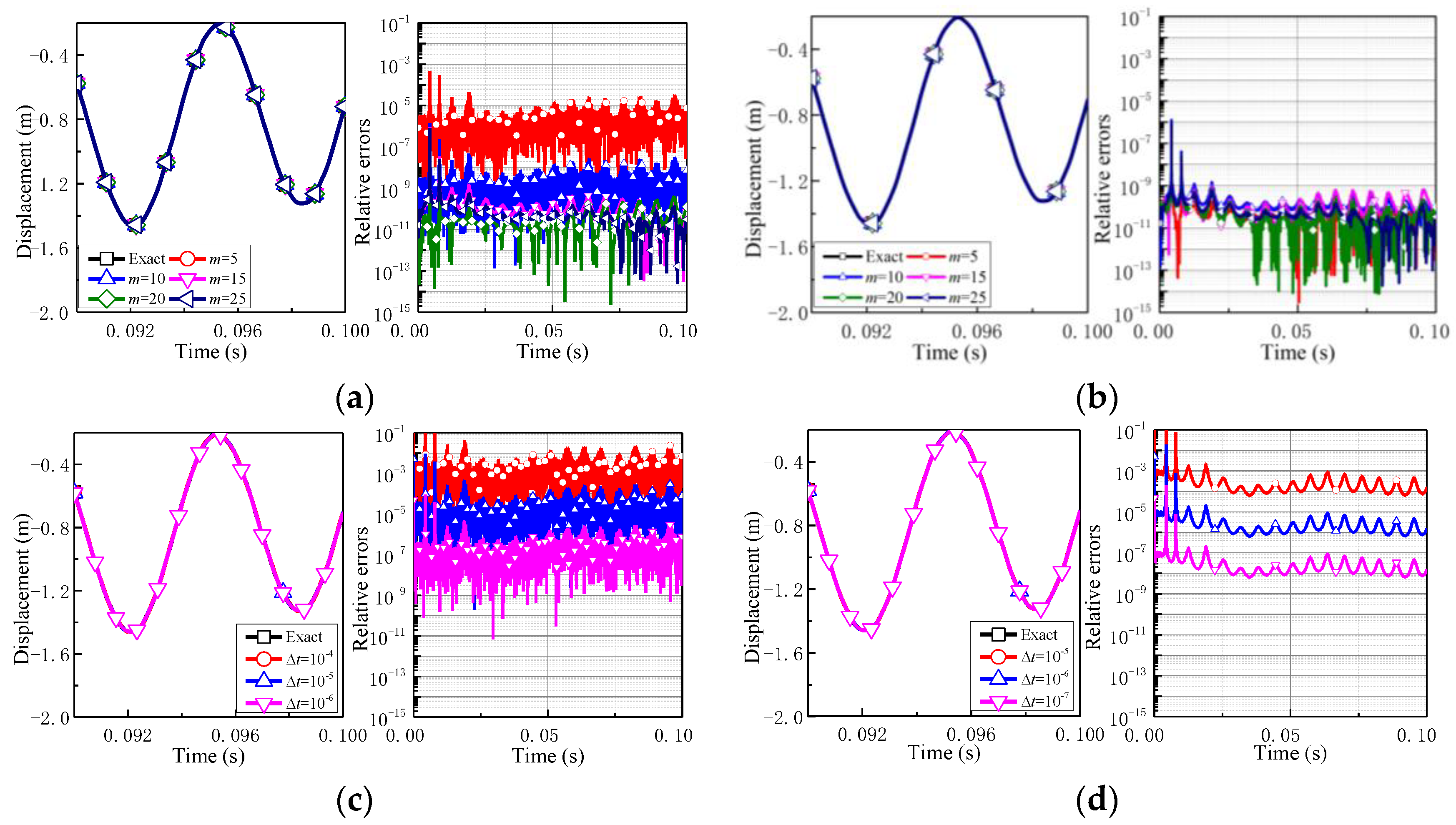
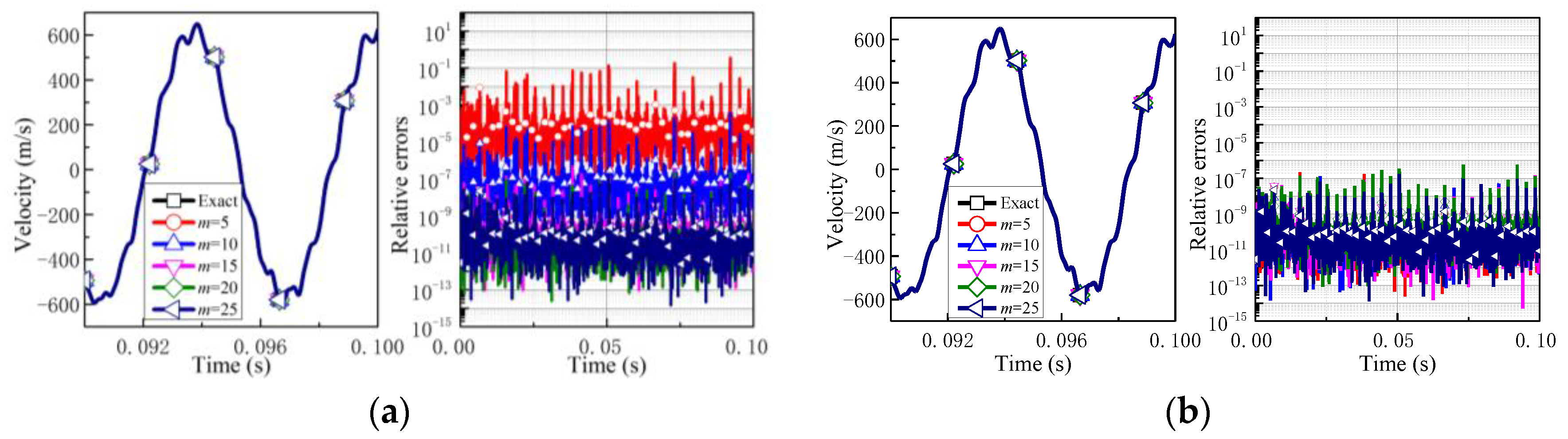
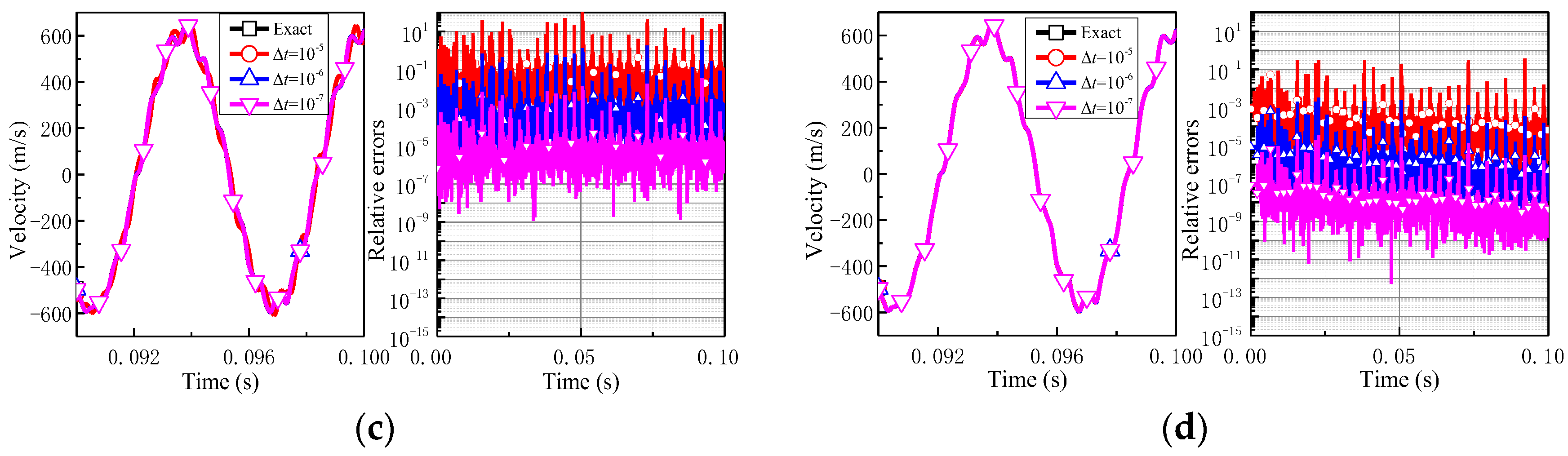
Figure 9.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 2/) and f(t) = sin(2t) (r represents number of Gauss–Legendre nodes).
Figure 9.
Relative errors in displacement, velocity, and acceleration of the AECM1 for the case of ξ = 2/) and f(t) = sin(2t) (r represents number of Gauss–Legendre nodes).
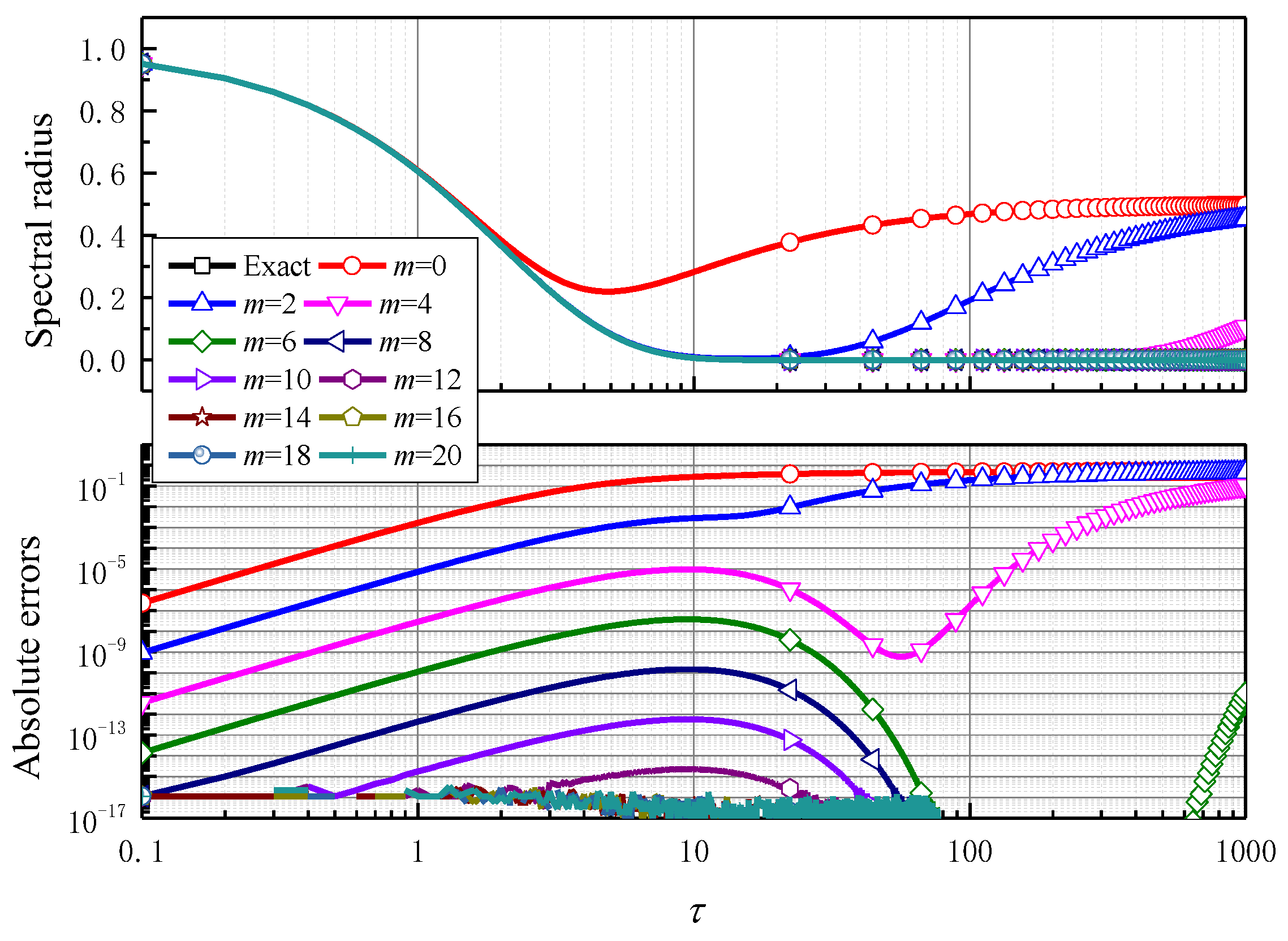
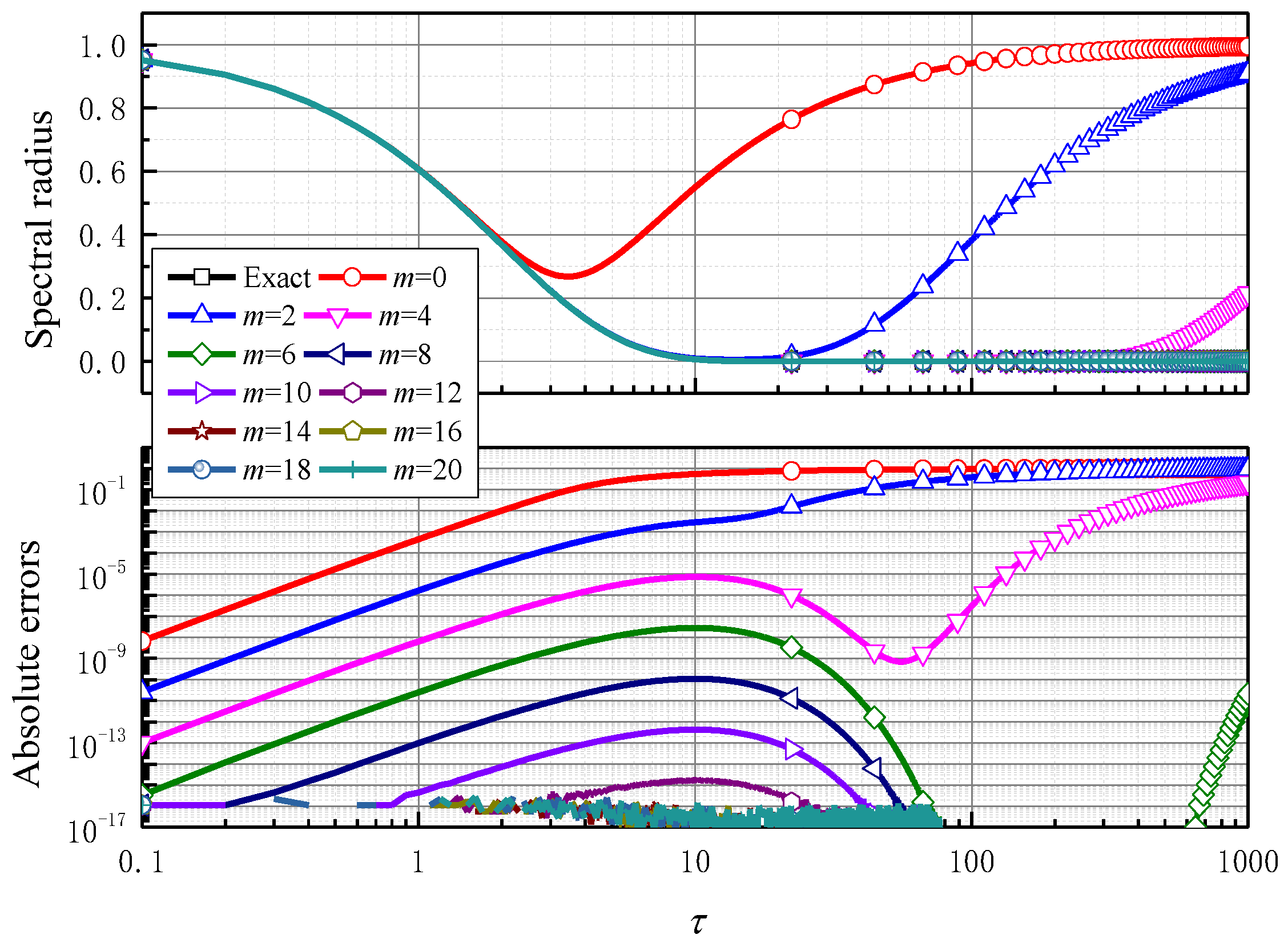
Figure 10.
Spectral radius of the AEC/DM2 versus τ for the undamped case: (a) AEDM2, ρ∞ = 0; (b) AEDM2, ρ∞ = 0.3; (c) AEDM2, ρ∞ = 0.7; and (d) AECM2, ρ∞ = 1.
Figure 10.
Spectral radius of the AEC/DM2 versus τ for the undamped case: (a) AEDM2, ρ∞ = 0; (b) AEDM2, ρ∞ = 0.3; (c) AEDM2, ρ∞ = 0.7; and (d) AECM2, ρ∞ = 1.
Figure 11.
Numerical damping ratio and period elongation of the AEC/DM2 (ρ∞ = 0) versus τ for the undamped case.
Figure 11.
Numerical damping ratio and period elongation of the AEC/DM2 (ρ∞ = 0) versus τ for the undamped case.
Figure 12.
Period elongation of the AEC/DM2 (ρ∞ = 1) versus τ for the undamped case.
Figure 12.
Period elongation of the AEC/DM2 (ρ∞ = 1) versus τ for the undamped case.
Figure 13.
Spectral radius of the AEC/DM2 (ρ∞ = 0) versus τ for the damped case.
Figure 13.
Spectral radius of the AEC/DM2 (ρ∞ = 0) versus τ for the damped case.
Figure 14.
Spectral radius of the AEC/DM2 (ρ∞ = 0.5) versus τ for the damped case.
Figure 14.
Spectral radius of the AEC/DM2 (ρ∞ = 0.5) versus τ for the damped case.
Figure 15.
Spectral radius of the AEC/DM2 (ρ∞ = 1) versus τ for the damped case.
Figure 15.
Spectral radius of the AEC/DM2 (ρ∞ = 1) versus τ for the damped case.
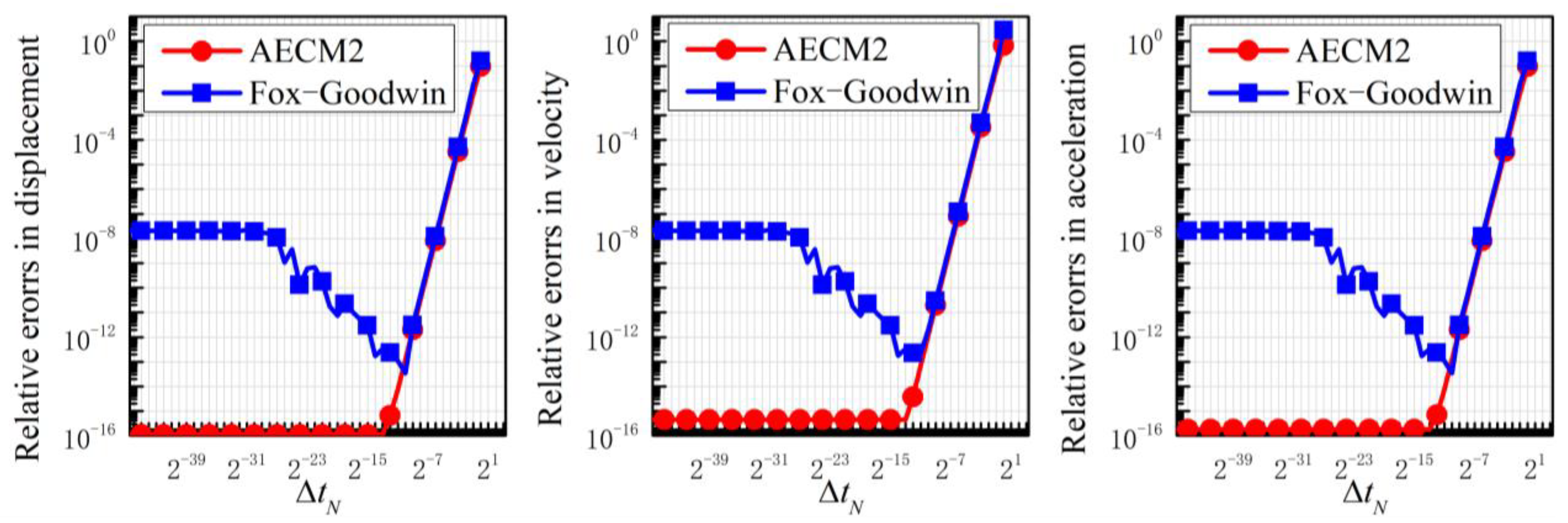
Figure 16.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 0 and f(t) = 0.
Figure 16.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 0 and f(t) = 0.
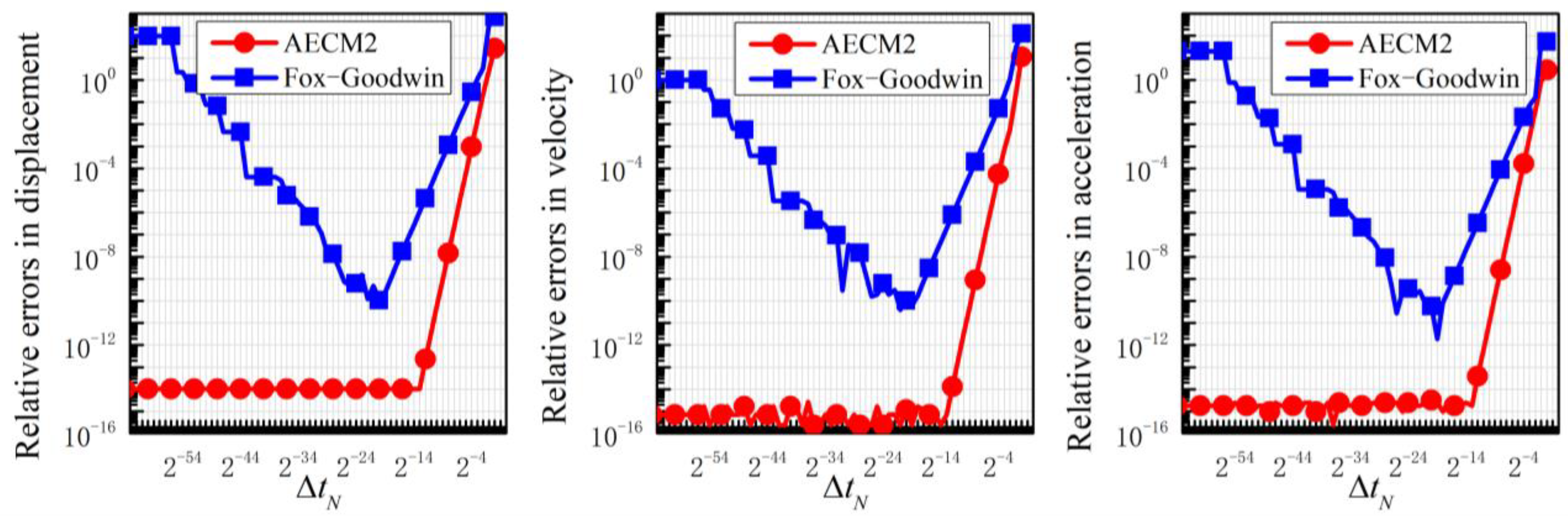
Figure 17.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 0.5 and f(t) = 0.
Figure 17.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 0.5 and f(t) = 0.
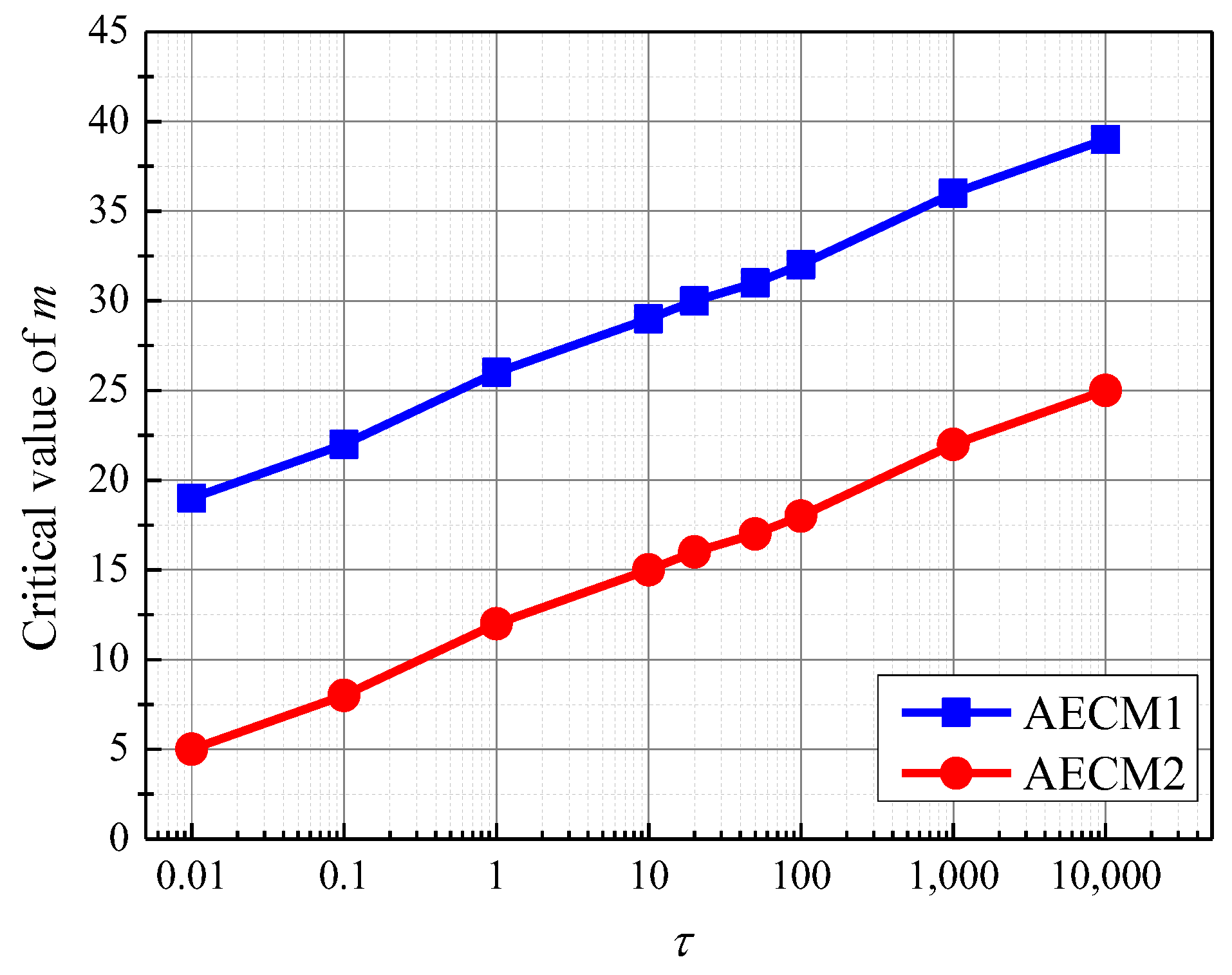
Figure 18.
Critical values of m of the AECM1 and AECM2.
Figure 18.
Critical values of m of the AECM1 and AECM2.
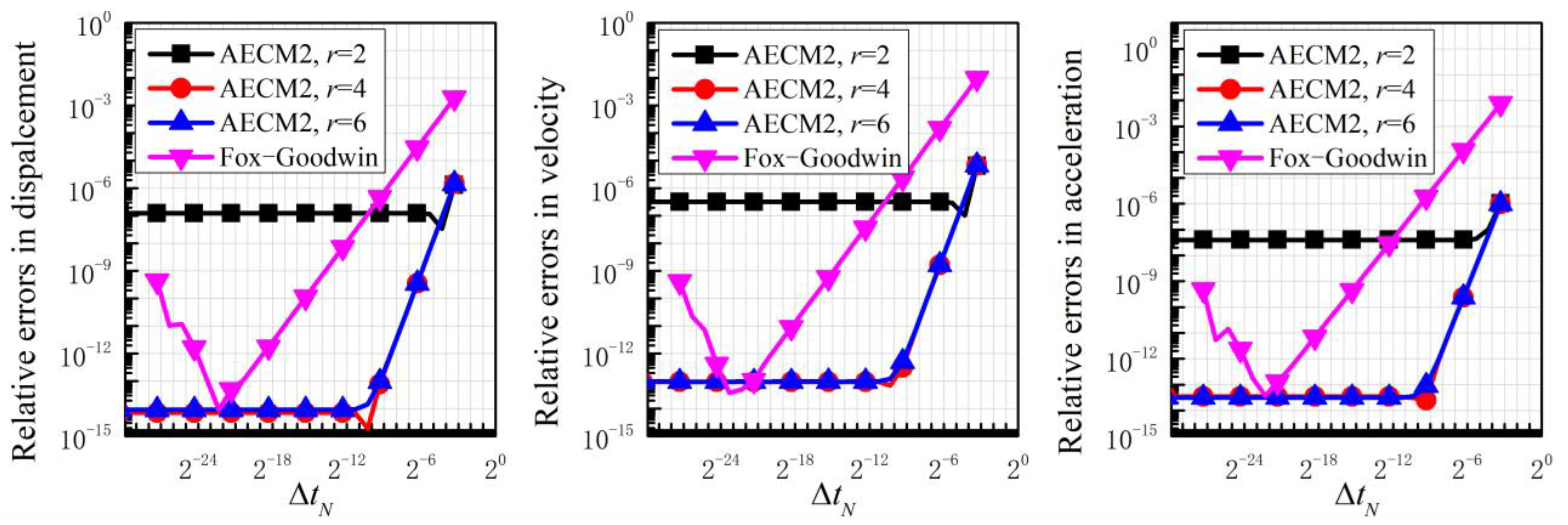
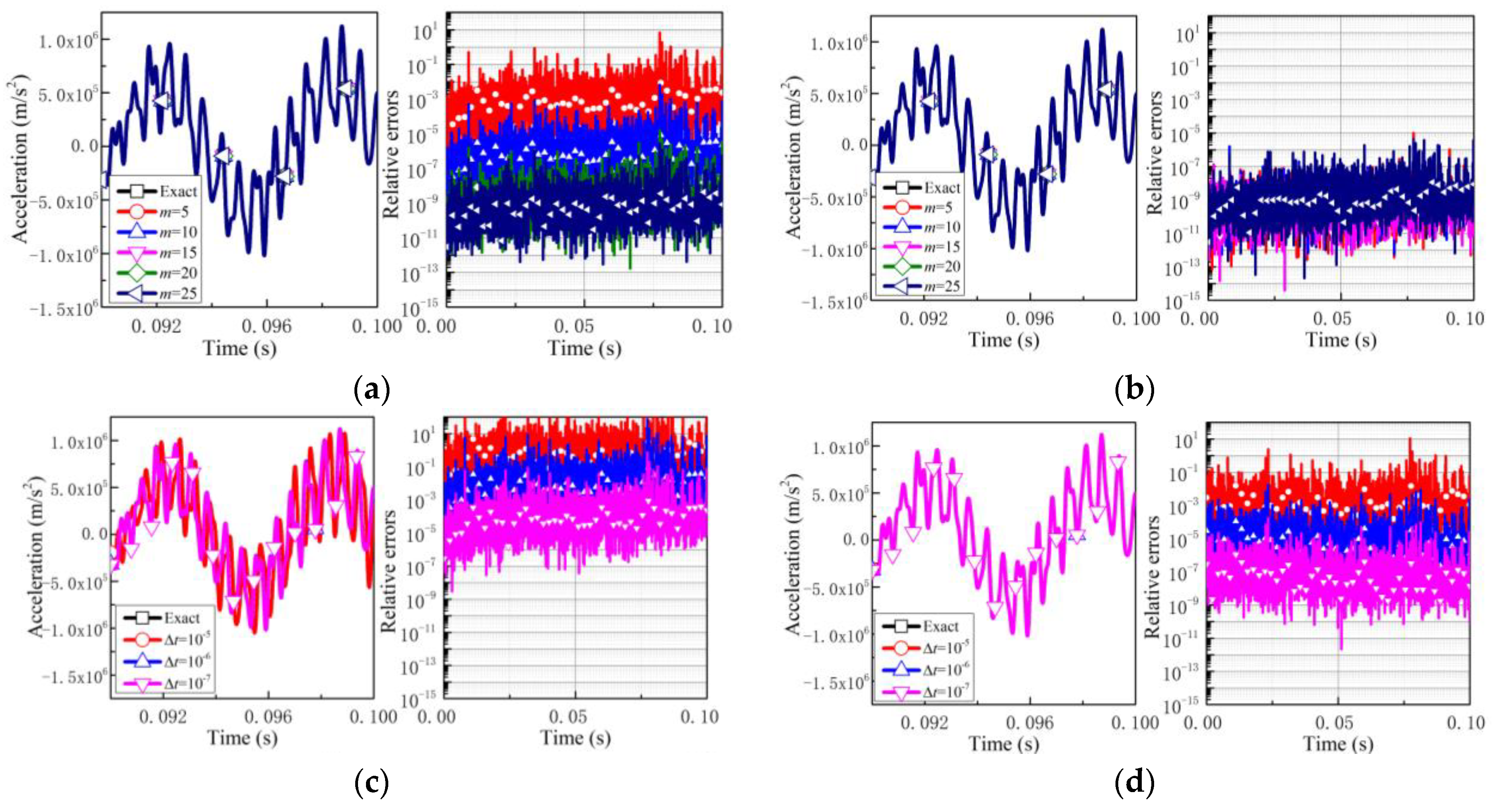
Figure 19.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 2/ and f(t) = sin(2t) (r represents number of Gauss–Legendre nodes).
Figure 19.
Relative errors in displacement, velocity, and acceleration of the AECM2 for the case of ξ = 2/ and f(t) = sin(2t) (r represents number of Gauss–Legendre nodes).
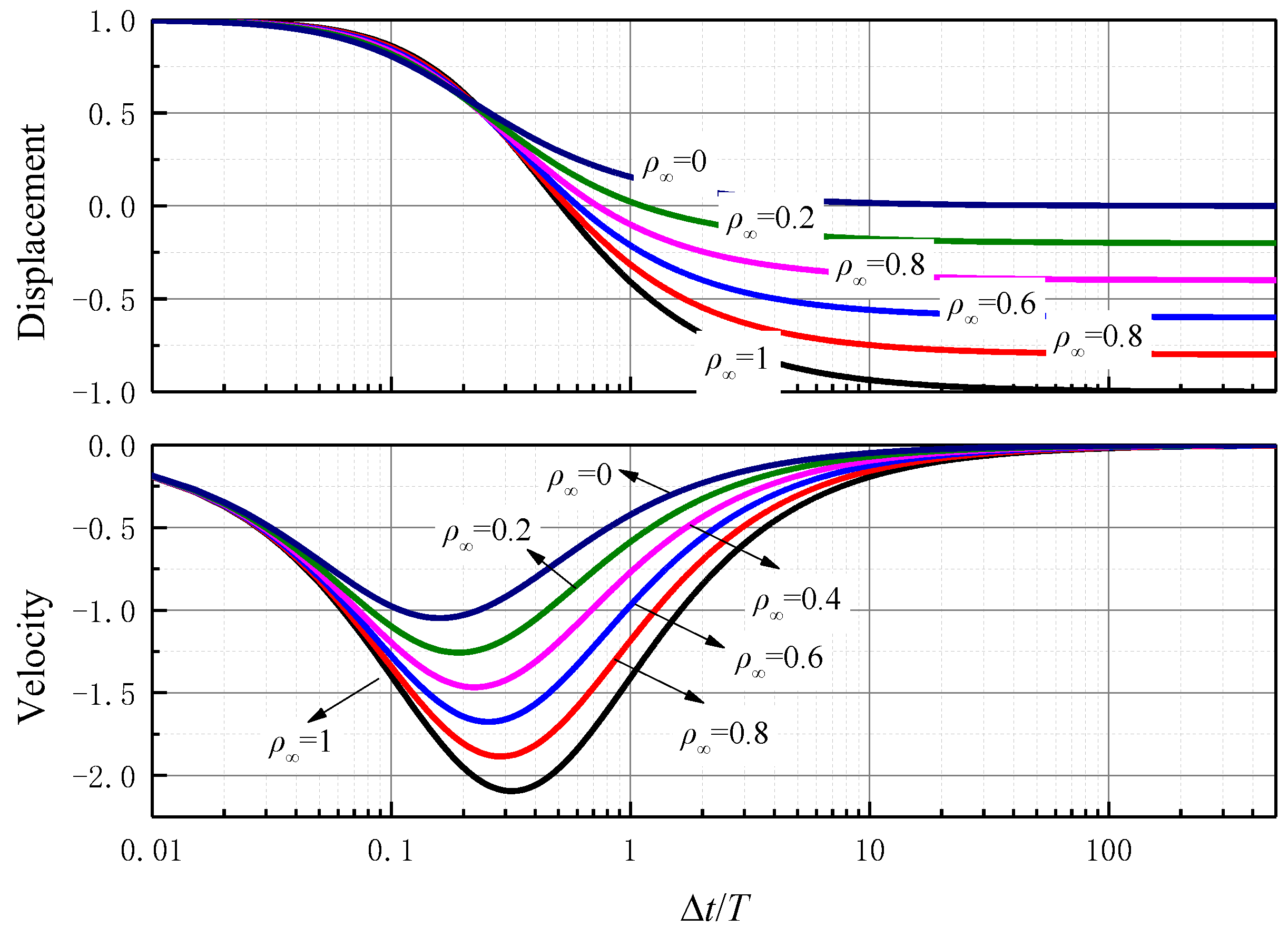
Figure 20.
Displacement and velocity at the end of the first time step versus Δt/T of the AEC/DM1.
Figure 20.
Displacement and velocity at the end of the first time step versus Δt/T of the AEC/DM1.
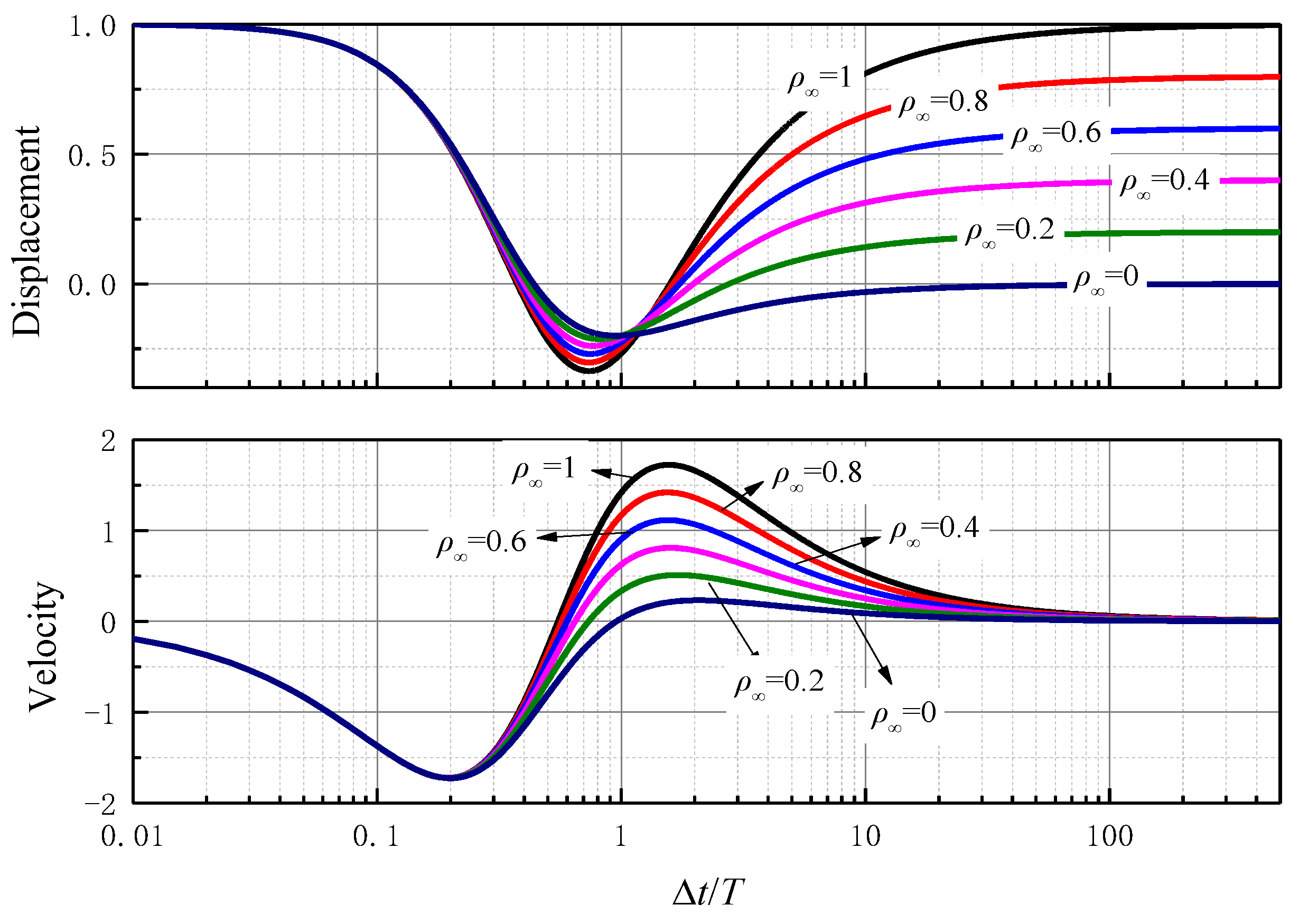
Figure 21.
Displacement and velocity at the end of the first time step versus Δt/T of the AEC/DM2.
Figure 21.
Displacement and velocity at the end of the first time step versus Δt/T of the AEC/DM2.
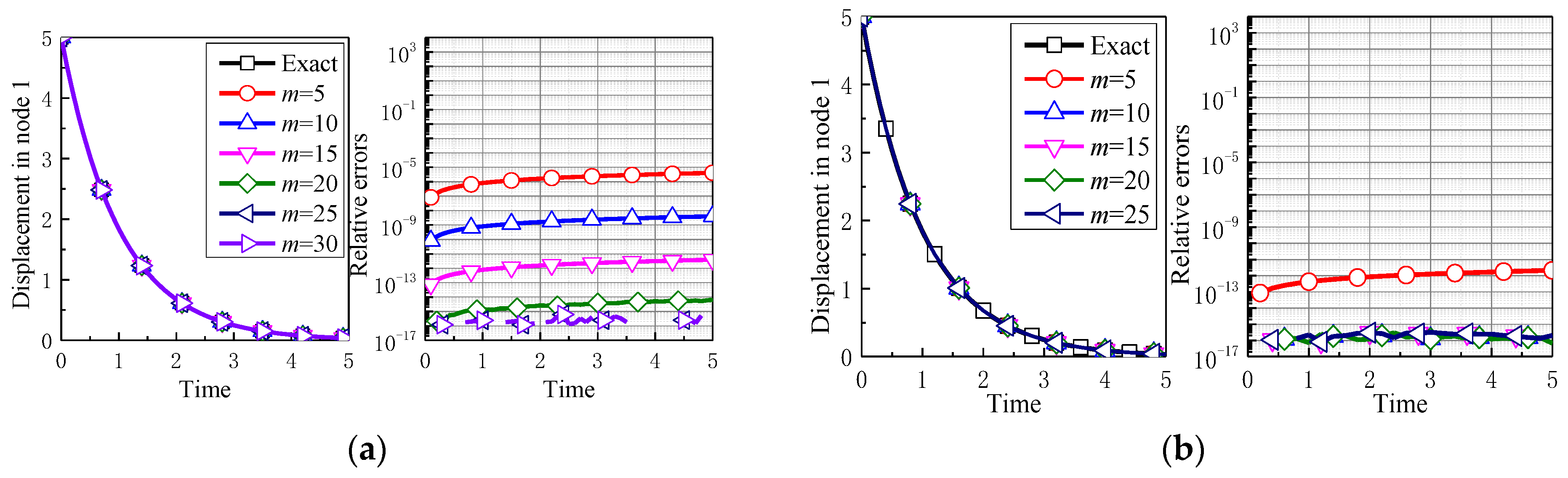
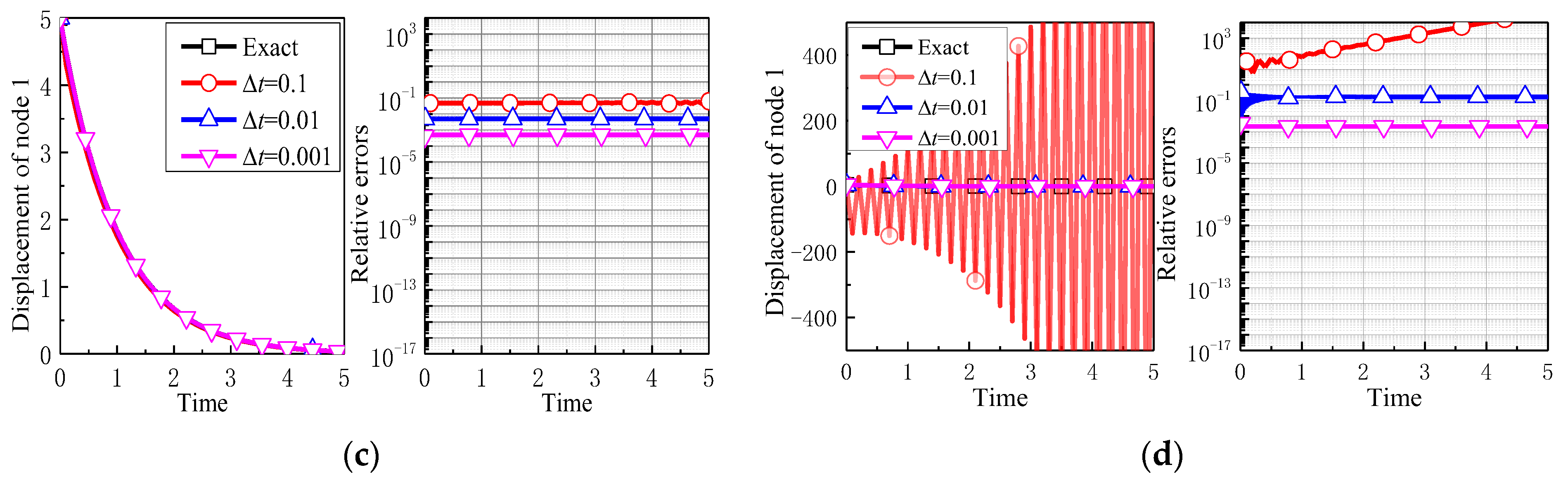
Figure 22.
Displacement at the first node and absolute errors versus time: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 22.
Displacement at the first node and absolute errors versus time: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
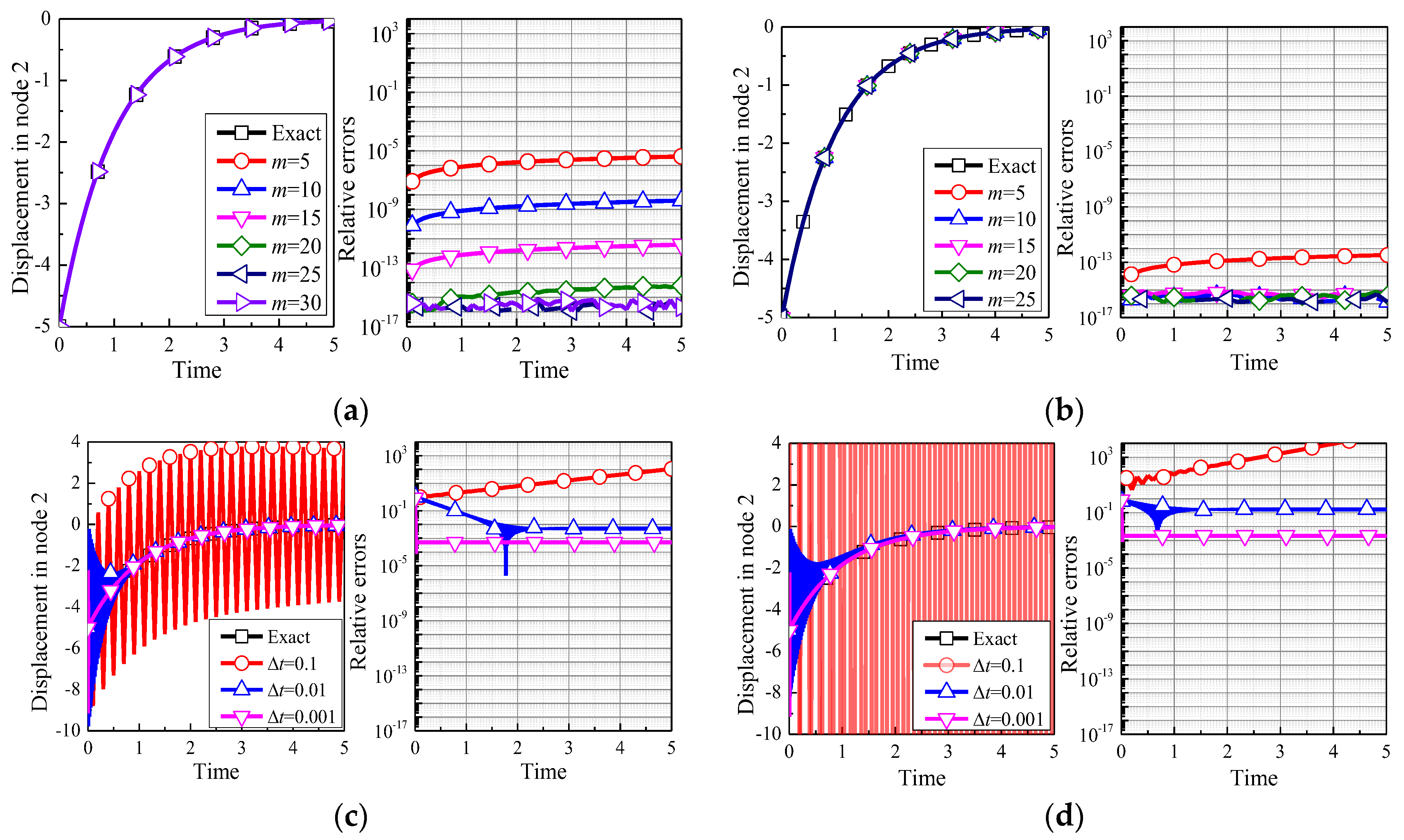
Figure 23.
Displacement at the second node and absolute errors versus time: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 23.
Displacement at the second node and absolute errors versus time: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
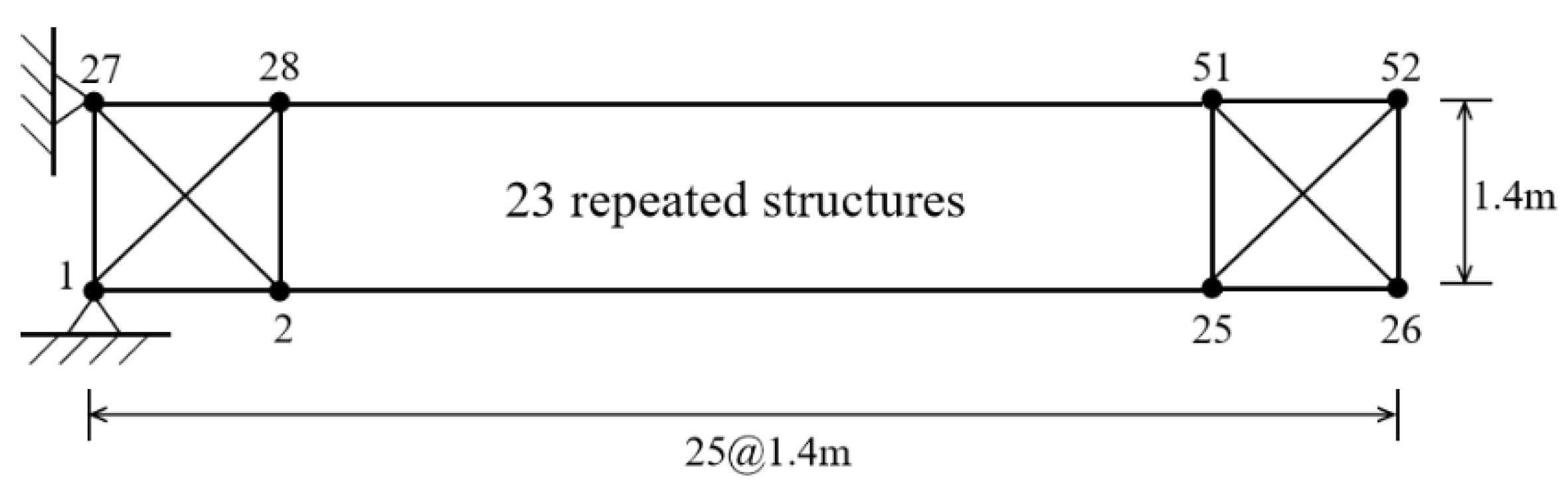
Figure 24.
Cantilever plane truss.
Figure 24.
Cantilever plane truss.
Figure 25.
Displacement of node 52 in vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 25.
Displacement of node 52 in vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 26.
Velocity of node 52 in a vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 26.
Velocity of node 52 in a vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 27.
Acceleration of node 52 in a vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
Figure 27.
Acceleration of node 52 in a vertical direction and absolute errors: (a) AECM1; (b) AECM2; (c) TR; and (d) Fox–Goodwin.
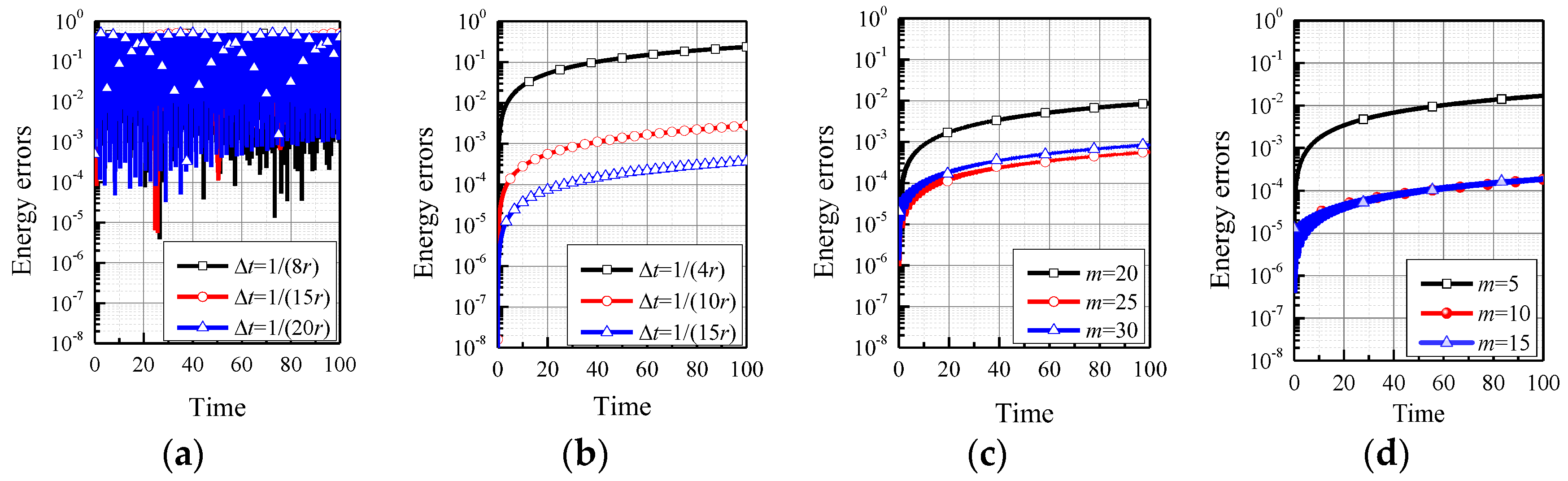
Figure 28.
Energy errors of these methods versus time: (a) Euler; (b) RK4; (c) AEDM1; and (d) AEDM2.
Figure 28.
Energy errors of these methods versus time: (a) Euler; (b) RK4; (c) AEDM1; and (d) AEDM2.
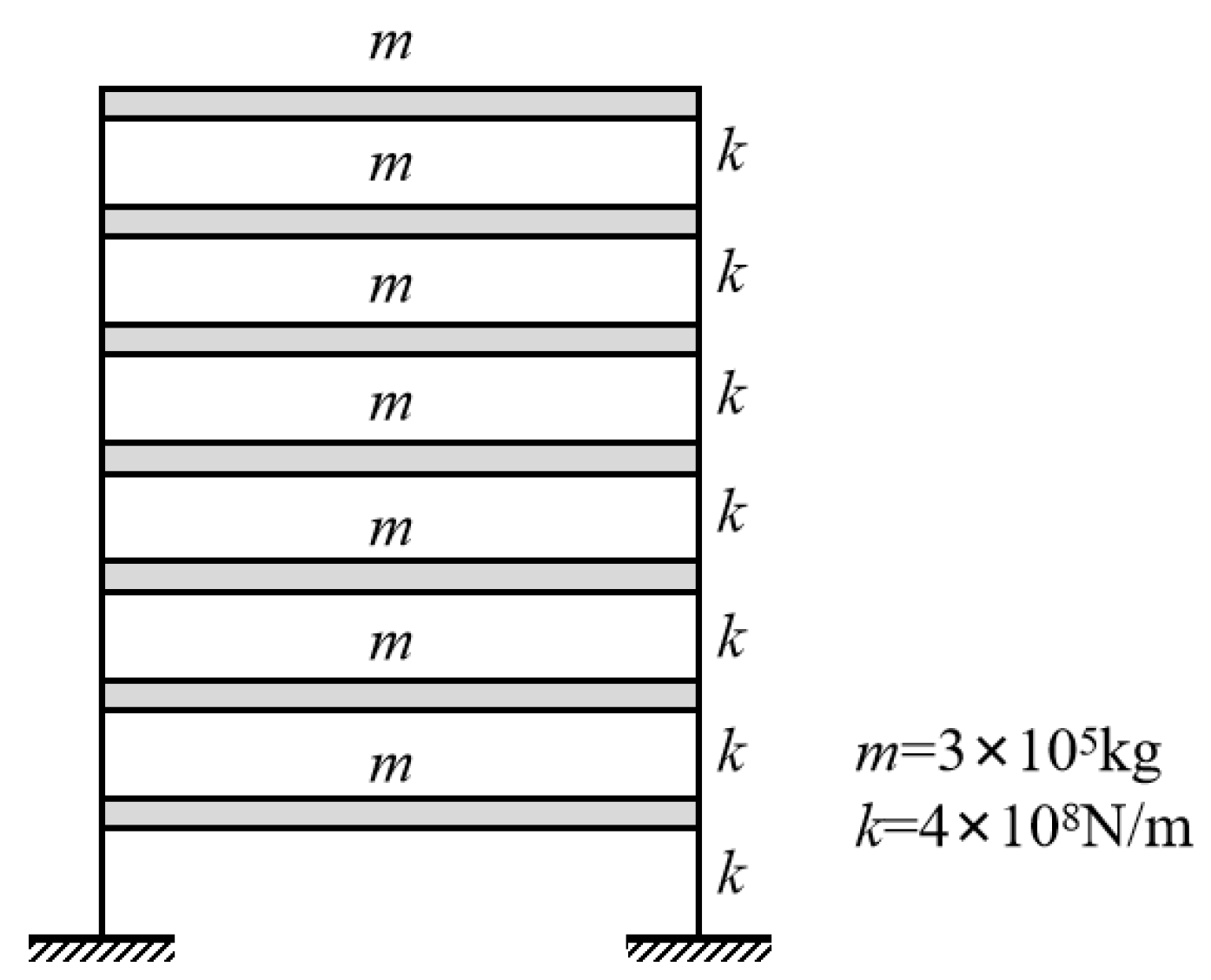
Figure 29.
Seven-story shear building.
Figure 29.
Seven-story shear building.
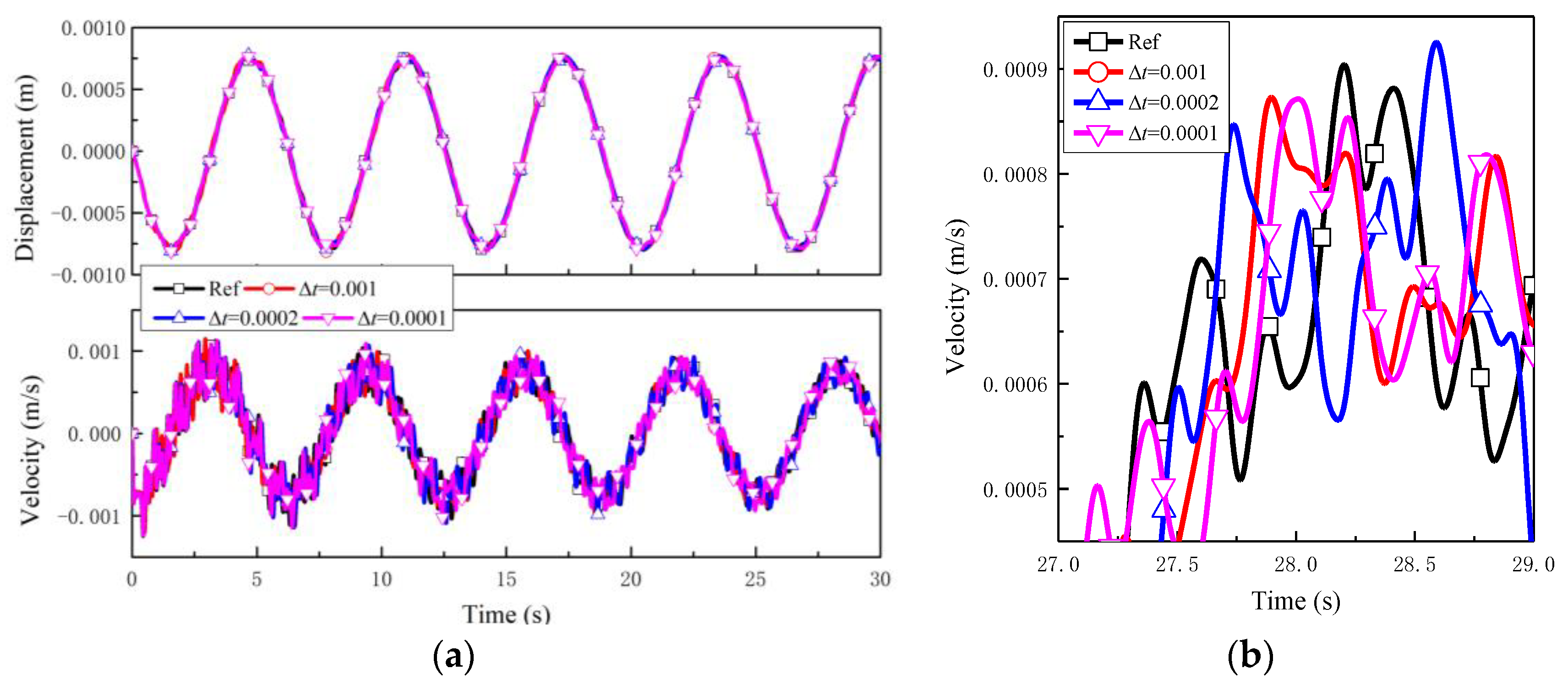
Figure 30.
Numerical results of the modified Euler method at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
Figure 30.
Numerical results of the modified Euler method at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
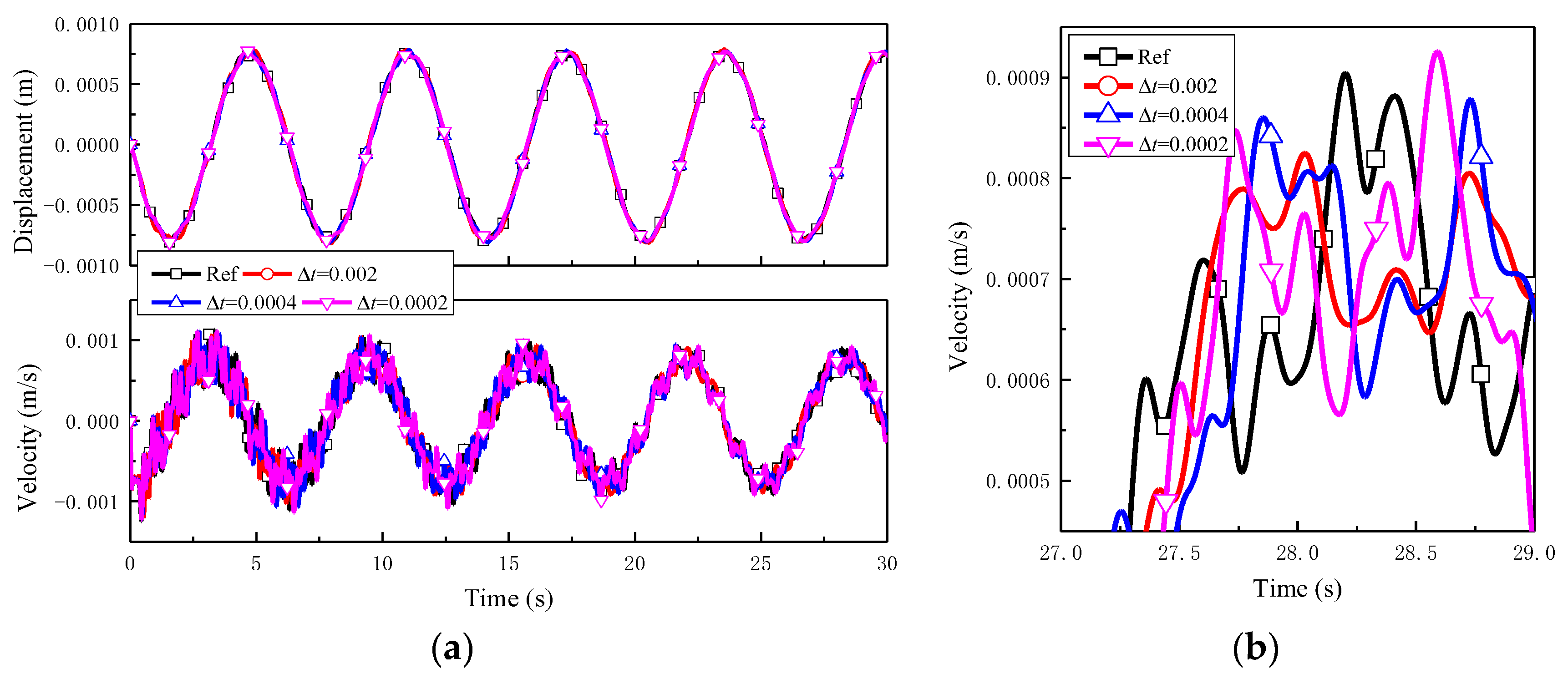
Figure 31.
Numerical results of the RK4 method at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
Figure 31.
Numerical results of the RK4 method at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
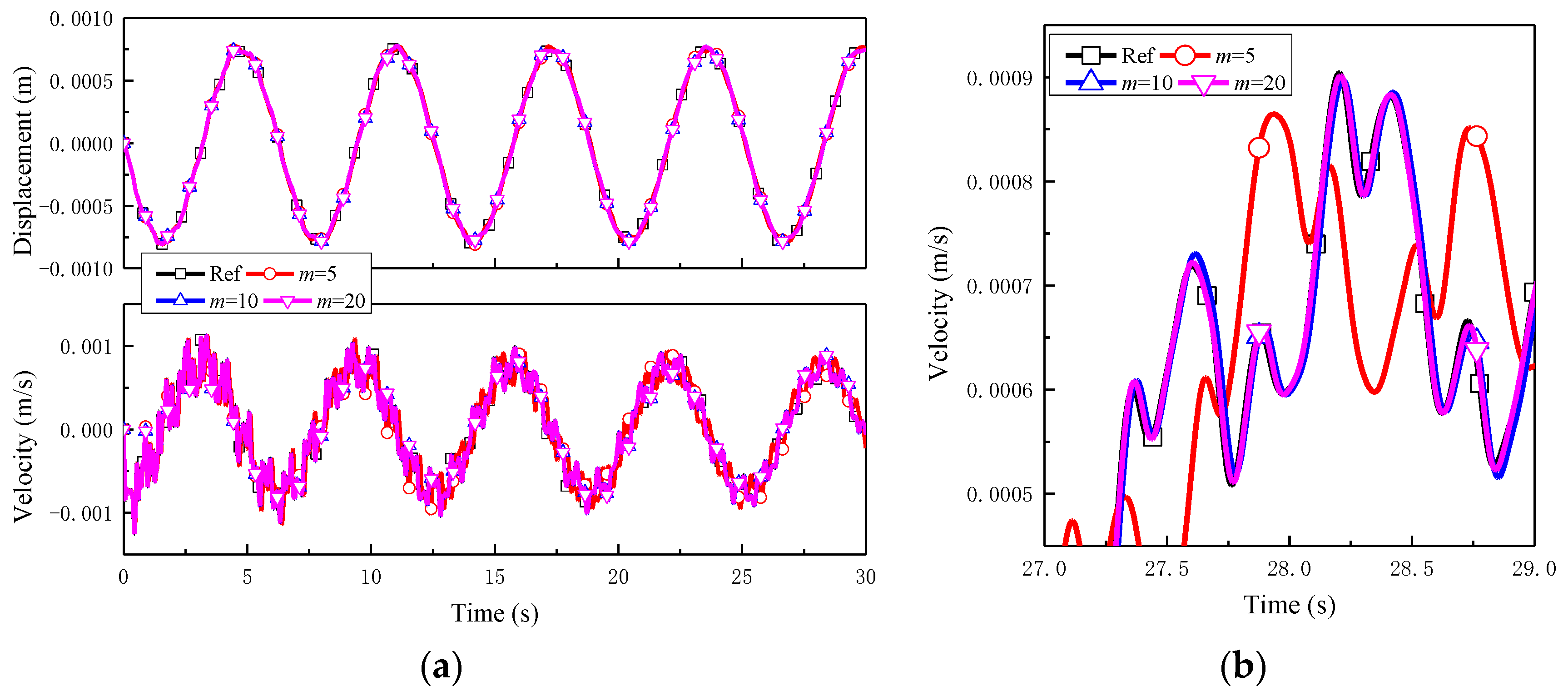
Figure 32.
Numerical results of the AECM1 at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
Figure 32.
Numerical results of the AECM1 at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
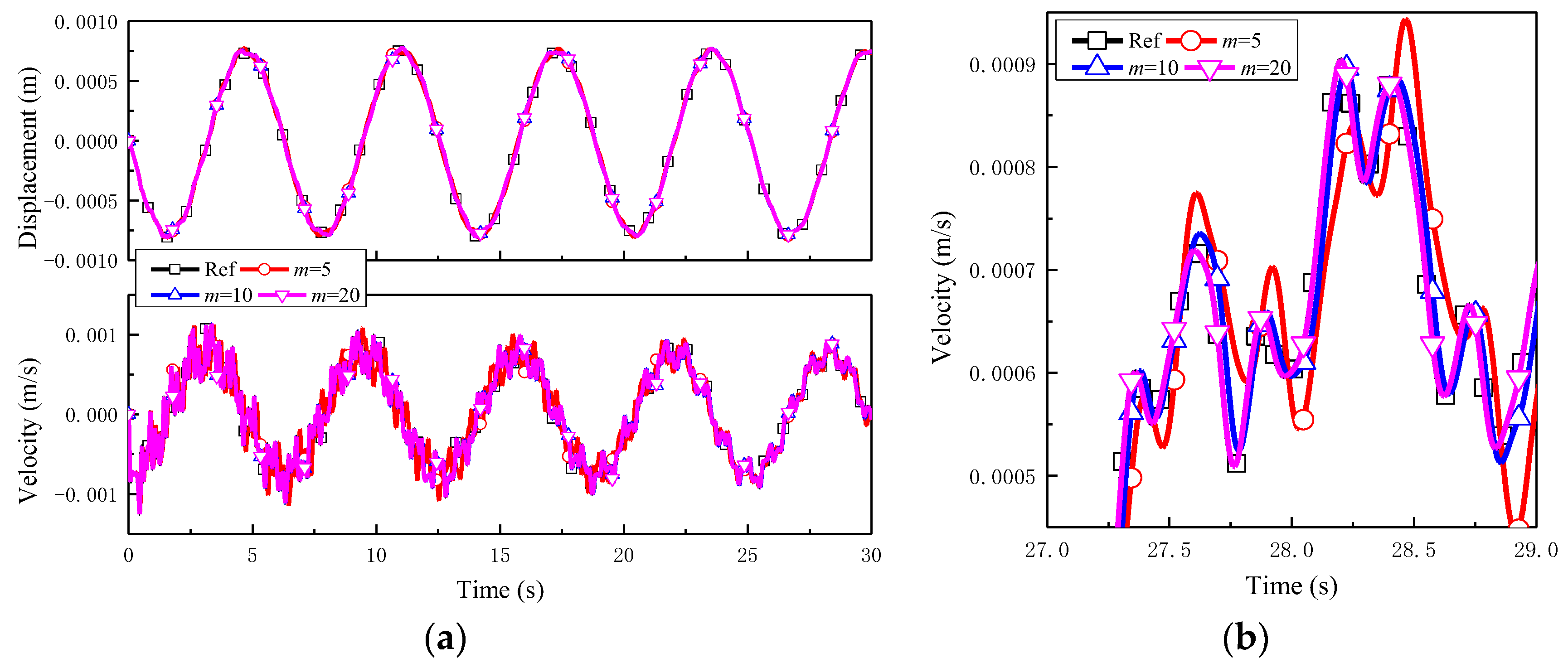
Figure 33.
Numerical results of the AECM2 at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
Figure 33.
Numerical results of the AECM2 at the bottom story: (a) Numerical results of the bottom story in the [0, 30]s; (b) Velocity of the bottom story in the [27, 29]s.
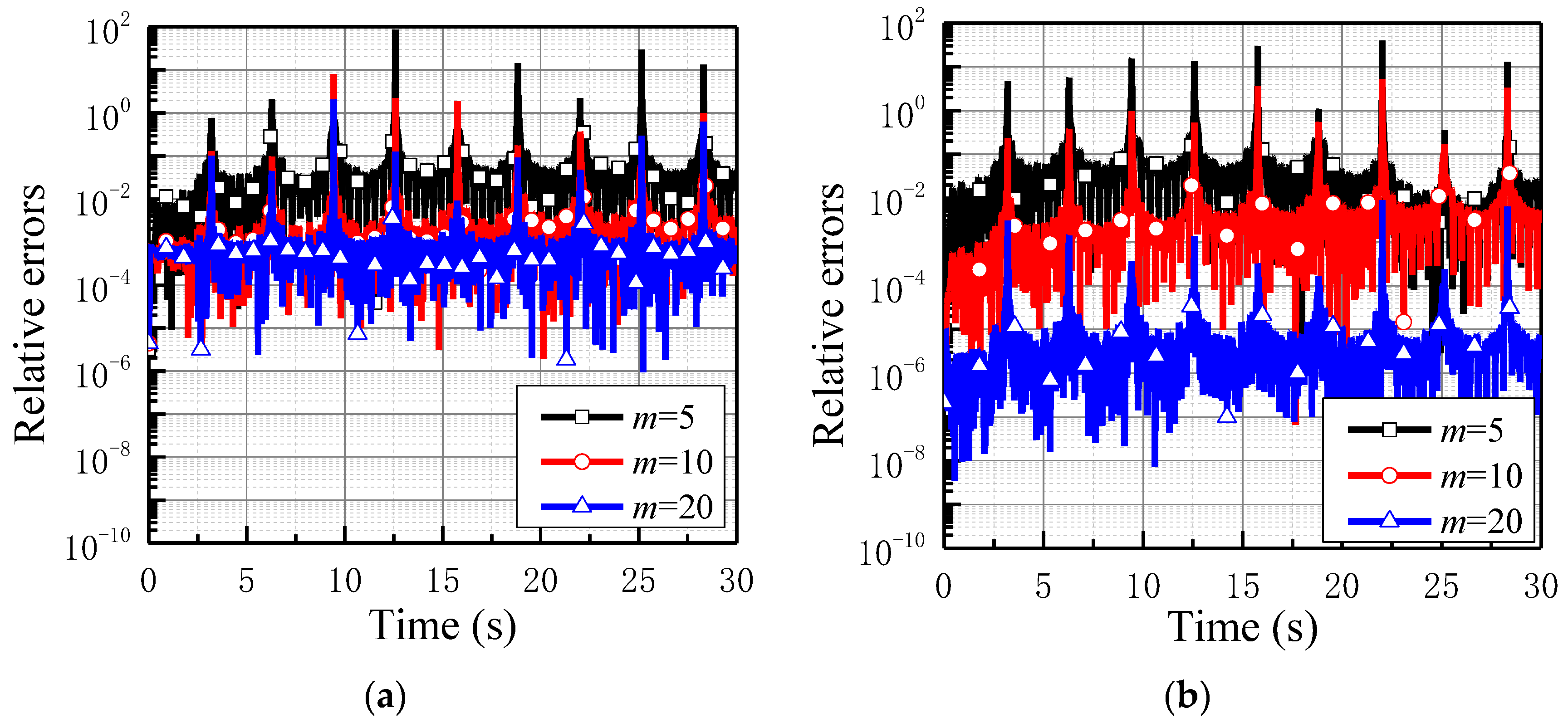
Figure 34.
Relative errors of the AECM1 and AECM2 in displacement at the bottom story: (a) AECM1; and (b) AECM2.
Figure 34.
Relative errors of the AECM1 and AECM2 in displacement at the bottom story: (a) AECM1; and (b) AECM2.
Figure 35.
Mass-spring system.
Figure 35.
Mass-spring system.
Figure 36.
Displacement of the Nth mass (N = 100): (a) Simulations in the interval [0, 30]s; (b) Simulations in the interval [27.44, 27.56]s.
Figure 36.
Displacement of the Nth mass (N = 100): (a) Simulations in the interval [0, 30]s; (b) Simulations in the interval [27.44, 27.56]s.
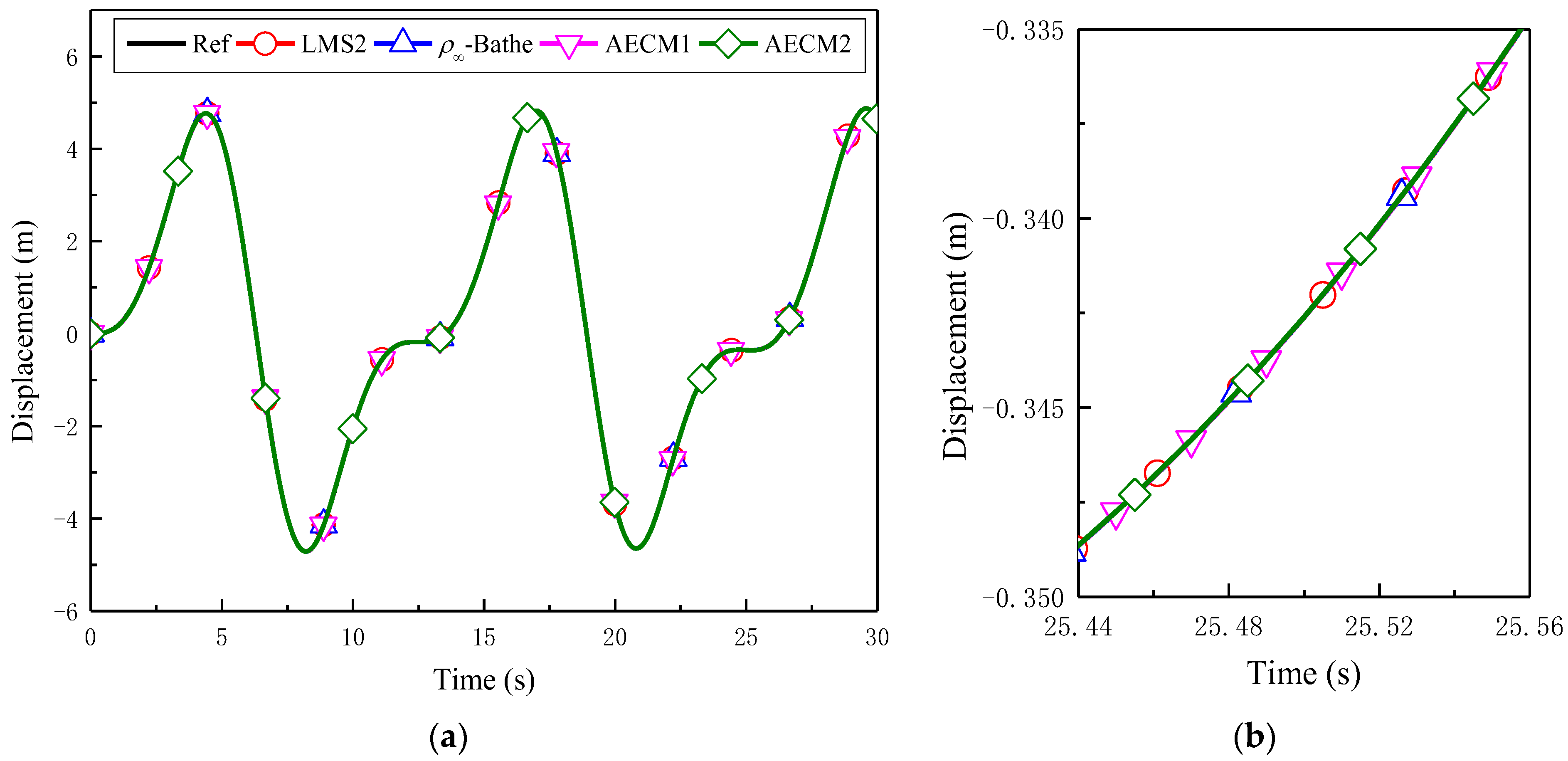
Figure 37.
Displacement of the Nth mass (N = 1000): (a) Simulations in the interval [0, 30]s; (b) Simulations in the interval [25.44, 25.56]s.
Figure 37.
Displacement of the Nth mass (N = 1000): (a) Simulations in the interval [0, 30]s; (b) Simulations in the interval [25.44, 25.56]s.
Table 1.
Absolute errors of the method of storing total matrix and the method of storing incremental matrix.
Table 1.
Absolute errors of the method of storing total matrix and the method of storing incremental matrix.
| | m = 1 | m = 10 | m = 100 | m = 1000 |
|---|
| Total | 0.00267091807564768 | 5.39597800242042 × 10−6 | 0.105170918075648 | 0.105170918075648 |
| increment | 0.00267091807564768 | 5.39597790183422 × 10−6 | 0 | 0 |
Table 2.
The critical value of m of the AECM1 for different ω∆t.
Table 2.
The critical value of m of the AECM1 for different ω∆t.
| ω∆t | 0.01 | 0.1 | 1 | 10 | 20 | 50 | 100 | 1000 | 10,000 |
| mcr | 19 | 22 | 26 | 29 | 30 | 31 | 32 | 36 | 39 |
Table 3.
The critical value of m of the AECM2 for different ω∆t.
Table 3.
The critical value of m of the AECM2 for different ω∆t.
| ω∆t | 0.01 | 0.1 | 1 | 10 | 20 | 50 | 100 | 1000 | 10,000 |
| mcr | 5 | 8 | 12 | 15 | 16 | 17 | 18 | 22 | 25 |
Table 4.
CPUs of the AECM1, AECM2, TR, and Fox–Goodwin in the interval [0, 500]s.
Table 4.
CPUs of the AECM1, AECM2, TR, and Fox–Goodwin in the interval [0, 500]s.
| | AECM1 | AECM2 |
|---|
| m = 5 | m = 10 | m = 20 | m = 25 | m = 5 | m = 10 | m = 20 | m = 25 |
|---|
| Preparation | 5.7800 × 10−5 | 6.2700 × 10−5 | 6.3500 × 10−5 | 6.6700 × 10−5 | 0.0016 | 0.0017 | 0.0018 | 0.0016 |
| Recursion | 0.0177 | 0.0135 | 0.0139 | 0.0138 | 0.0144 | 0.0125 | 0.0125 | 0.0109 |
| Total | 0.0178 | 0.0136 | 0.0140 | 0.0139 | 0.0160 | 0.0142 | 0.0143 | 0.0125 |
| | TR | Fox–Goodwin |
| ∆t = 0.1 | ∆t = 0.01 | ∆t = 0.001 | | ∆t = 0.1 | ∆t = 0.01 | ∆t = 0.001 | |
| Preparation | - | - | - | | - | - | - | |
| Recursion | 0.0100 | 0.1251 | 1.8498 | | 0.0122 | 0.1063 | 1.3964 | |
| Total | 0.0100 | 0.1251 | 1.8498 | | 0.0122 | 0.1063 | 1.3964 | |
Table 5.
CPUs of the AECM1, AECM2, TR, and Fox–Goodwin in the interval [0, 0.1]s.
Table 5.
CPUs of the AECM1, AECM2, TR, and Fox–Goodwin in the interval [0, 0.1]s.
| | AECM1 | AECM2 |
|---|
| m = 5 | m = 10 | m = 20 | m = 25 | m = 5 | m = 10 | m = 20 | m = 25 |
|---|
| Preparation | 0.0183 | 0.0254 | 0.0353 | 0.0385 | 0.0209 | 0.0286 | 0.0383 | 0.0459 |
| Recursion | 2.2373 | 2.4461 | 2.8605 | 2.8807 | 2.7853 | 2.6430 | 2.9451 | 2.9320 |
| Total | 2.2556 | 2.4715 | 2.8958 | 2.9192 | 2.8062 | 2.6716 | 2.9834 | 2.9779 |
| | TR | Fox–Goodwin |
| | ∆t = 10−5 | ∆t = 10−6 | ∆t = 10−7 | | ∆t = 10−5 | ∆t = 10−6 | ∆t = 10−7 | |
| Preparation | - | - | - | | - | - | - | |
| Recursion | 0.1629 | 1.8562 | 26.8233 | | 0.1306 | 1.8313 | 21.9914 | |
| Total | 0.1629 | 1.8562 | 26.8233 | | 0.1306 | 1.8313 | 21.9914 | |
Table 6.
CPUs of the AEDM1, AEDM2, Euler, and RK4 in the simulations of the interval [0, 1000]s.
Table 6.
CPUs of the AEDM1, AEDM2, Euler, and RK4 in the simulations of the interval [0, 1000]s.
| | AEDM1 | | | AEDM2 | | |
|---|
| m = 20 | m = 25 | m = 30 | m = 5 | m = 10 | m = 15 |
|---|
| Preparation | 0.000169 | 0.000140 | 0.000396 | 0.002044 | 0.001902 | 0.002686 |
| Recursion | 4.006249 | 4.395022 | 4.950563 | 4.867872 | 5.423115 | 6.616388 |
| Total | 4.006418 | 4.395162 | 4.950959 | 4.869916 | 5.425017 | 6.619074 |
| | Euler | | | RK4 |
| | ∆t = 1/(8r) | ∆t = 1/(15 r) | ∆t = 1/(20 r) | ∆t = 1/(4 r) | ∆t = 1/(10 r) | ∆t = 1/(15 r) |
| Preparation | - | - | - | - | - | - |
| Recursion | 4.054805 | 6.3309 | 10.699817 | 7.299833 | 16.232617 | 26.404818 |
| Total | 4.054805 | 6.3309 | 10.699817 | 7.299833 | 16.232617 | 26.404818 |
Table 7.
CPUs of the AECM1, AECM2, Euler, and RK4 in the simulations of the interval [0, 30]s.
Table 7.
CPUs of the AECM1, AECM2, Euler, and RK4 in the simulations of the interval [0, 30]s.
| | AECM1 | AECM2 |
|---|
| m = 5 | m = 10 | m = 20 | m = 5 | m = 10 | m = 20 |
|---|
| Preparation | 7.2980 × 10−4 | 5.4800 × 10−4 | 7.3120 × 10−4 | 0.0027 | 0.0029 | 0.0029 |
| Recursion | 25.7393 | 26.2247 | 27.3551 | 23.0725 | 23.5911 | 25.9989 |
| Total | 25.7400 | 26.2252 | 27.3558 | 23.0752 | 23.5940 | 26.0018 |
| | Euler | RK4 |
| | ∆t = 0.001 | ∆t = 0.0002 | ∆t = 0.0001 | ∆t = 0.002 | ∆t = 0.0004 | ∆t = 0.0002 |
| Preparation | - | - | - | - | - | - |
| Recursion | 16.3542 | 75.2145 | 155.6917 | 14.6172 | 58.4983 | 139.2688 |
| Total | 16.3542 | 75.2145 | 155.6917 | 14.6172 | 58.4983 | 139.2688 |
Table 8.
CPUs of the AECM1, AECM2, LMS2, and ρ∞-Bathe method (N = 100, Total = 30 s).
Table 8.
CPUs of the AECM1, AECM2, LMS2, and ρ∞-Bathe method (N = 100, Total = 30 s).
| | AECM1 | AECM2 | LMS2 | ρ∞-Bathe |
|---|
| Preparation | 0.0197 | 0.0184 | - | - |
| Recursion | 3.7715 | 2.4026 | 19.8547 | 19.5784 |
| Total | 3.7912 | 2.4210 | 19.8547 | 19.5784 |
Table 9.
CPUs of the AECM1, AECM2, LMS2, and ρ∞-Bathe method (N = 1000, Total = 30 s).
Table 9.
CPUs of the AECM1, AECM2, LMS2, and ρ∞-Bathe method (N = 1000, Total = 30 s).
| | AECM1 | AECM2 | LMS2 | ρ∞-Bathe |
|---|
| Preparation | 13.6961 | 22.8801 | - | - |
| Recursion | 339.4413 | 248.7944 | 820.9083 | 686.0195 |
| Total | 353.1374 | 271.6745 | 820.9083 | 686.0195 |












































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}