Abstract
This article is concerned with fixed-time synchronization and preassigned-time synchronization of Cohen–Grossberg quaternion-valued neural networks with discontinuous activation functions and generalized time-varying delays. Firstly, a dynamic model of Cohen–Grossberg neural networks is introduced in the quaternion field, where the time delay successfully integrates discrete-time delay and proportional delay. Secondly, two types of discontinuous controllers employing the quaternion-valued signum function are designed. Without utilizing the conventional separation technique, by developing a direct analytical approach and using the theory of non-smooth analysis, several adequate criteria are derived to achieve fixed-time synchronization of Cohen–Grossberg neural networks and some more precise convergence times are estimated. To cater to practical requirements, preassigned-time synchronization is also addressed, which shows that the drive-slave networks reach synchronization within a specified time. Finally, two numerical simulations are presented to validate the effectiveness of the designed controllers and criteria.
Keywords:
Cohen–Grossberg quaternion-valued neural network; fixed-time synchronization; preassigned-time synchronization; non-separation approach MSC:
34A36; 34D20; 92B20; 93D05
1. Introduction
In the past few decades, quaternion-valued neural networks (QVNNs) have become increasingly prevalent and have been applied extensively to various fields, including image processing [1], speech recognition [2], robot control [3], and signal processing [4]. Owing to the multi-dimensional inherent properties of quaternions, quaternion neurons exhibit enhanced storage and computational capabilities compared to real-valued and complex-valued neurons. This inherent advantage equips QVNNs with formidable signal processing capabilities. For instance, quaternion neurons have the capability to process color information holistically, unlike real-valued and complex-valued neurons, which handle color space components separately. Consequently, QVNNs naturally handle internal dependencies between color channels [5]. Furthermore, because all parameters in QVNNs are quaternion-valued, they excel in managing rotations and scaling of 3-D vectors [6]. Considering the aforementioned advantages, QVNNs have garnered increasing attention in both practical applications and theoretical analysis, particularly in terms of their dynamic characteristics, such as dissipativity [7,8], stability [9,10,11,12], and synchronization [13,14,15,16].
The synchronization of QVNNs involves attaining consistent states among the quaternion neurons under external control. Nowadays, significant advancements have been achieved in the synchronization of QVNNs. For example, Singh et al. conducted research on the issue of anti-synchronization in quaternion-valued inertial neural networks with unbounded time delays [13]. Zhao et al. discussed the quasi-synchronization of discrete-time fractional-order quaternion-valued memristive neural networks with uncertain parameters and time delays [14]. In their works, synchronization is accomplished over an infinite time frame. However, in numerous practical scenarios, achieving synchronization within a finite time is crucial due to the limited lifespan of organisms or devices. In fact, compared to asymptotic synchronization, finite-time synchronization offers advantages such as accelerated convergence, strengthened robustness, and increased resistance to interference. Given this, Ping et al. [16] investigated finite-time synchronization of QVNNs by employing an improved one-norm and quaternion sign function, along with a well-designed event-triggered controller. It is important to emphasize that the settling time (ST) obtained within a finite-time framework is significantly influenced by the initial states and parameters of the systems.
In many practical scenarios, it is challenging and difficult to measure all initial states. Consequently, defining the ST for finite-time (FNT) synchronization becomes a formidable task. In order to address this challenge, the concept of fixed time (FIT) was introduced and the FIT stability theorem was first proposed in [17], in which the estimate of the ST is improved by eliminating its dependence on initial values. Since then, numerous remarkable research endeavors have emerged, encompassing FIT synchronization of recurrent neural networks [18,19,20], complex-valued neural networks (CVNNs) [21,22,23], and QVNNs [24,25,26,27,28]. In [24,25,26], the FIT synchronization of QVNNs was investigated by decomposing the QVNN model into four real valued neural networks, which resulted in four real-valued controllers being designed. While this method indirectly raises control gain and complicates the viability of control strategies, it underscores the urgency of developing a novel approach that can directly examine neural networks within the quaternion domain.
Except for FIT synchronization, preassigned-time (PET) synchronization is a novel direction achieved by utilizing the enhanced FIT stability outcomes. Unlike FNT and FIT synchronization, the synchronization time of PET synchronization is predetermined to meet practical requirements, making it independent of model parameters and initial conditions. The research on PET synchronization has garnered significant attention among scholars in recent years due to the aforementioned advantages and characteristics. Nevertheless, there remains a scarcity of related research results [29,30]. In [29], a feedback controller and a novel event-triggered controller are designed to discuss the PET synchronization in real-valued networks of piecewise smooth systems. Similarly, in [30], several smooth controllers were designed to facilitate the PET synchronization of real-valued complex networks. It is noteworthy that the majority of existing research results are primarily concentrated within the realm of real numbers, while the research in the quaternion field is in dire need of augmentation. Hence, the research on PET synchronization of QVNNs is of great significance and practical value. Furthermore, it is important to highlight that discontinuous situations are commonplace and unavoidable in real-world problems. However, the existing research outcomes pertaining to QVNNs seldom address these scenarios. Therefore, delving into the behavior of QVNNs with discontinuous activation functions carries substantial theoretical implications and practical relevance.
Drawing from recent research findings, scholars have explored a diverse array of network models. For instance, with the smooth control, the FIT/PAT synchronization was investigated for several types of neural networks, including switched coupled neural networks [31], BAM neural networks [32]. Owing to the strong robustness and generalization capabilities of Cohen–Grossberg neural networks (CGNNs) in data processing, allowing them to better handle the issue of noise interference and unknown data, it has attracted growing attention from scholars due to their significant practical application value. However, it is noteworthy that the research on Cohen–Grossberg quaternion-valued neural networks (CGQVNNs) remains conspicuously absent. Given the wide-ranging potential applications of CGNNs in areas such as pattern recognition, intelligent computing, and signal processing [32,33,34,35,36], a comprehensive examination of CGQVNNs is not only of great practical significance but also holds substantial research value. One of the primary challenges in addressing CGQVNNs lies in determining whether an outer amplification function exists within the quaternion field. If a real-valued amplification function is considered, CGQVNNs do not exhibit significant deviations from prior research outcomes. In addition, if QVNNs are divided into four real valued systems, they will be confronted with increased control costs and higher dimensions of computation. Therefore, how to develop a simpler and more efficient method to explore the FIT/PET synchronization of QVNNs in the quaternion field is an urgent problem to be overcome.
In consideration of the analysis outlined above, the FIT synchronization and PET synchronization of CGQVNNs with generalized time delay and discontinuous activation functions are investigated in this paper by using a measurable selection technique [37,38,39,40] and introducing a direct non-separation analysis framework. The key innovations and contributions of this paper can be succinctly summarized as follows:
- (1)
- A generalized time delay is introduced into the model of CGQVNNs, which successfully incorporates discrete constant delays [7], discrete time-varying delays [13] and proportional delays [9].
- (2)
- Compared with previous research on the synchronization issue of QVNNs [27,28], the synchronization problem of CGQVNNs with discontinuous activation functions is investigated for the first time. An effective analytical method is introduced to investigate the FIT synchronization and PET synchronization of CGQVNNs with quaternion-valued amplification function without separation, and high-precision ST is estimated.
- (3)
- Different from the methods used in [28], the FIT synchronization and PET synchronization of CGQVNNs are discussed through a direct analytical approach. Consequently, several effective quaternion-valued controllers are directly designed for the original CGQVNNs rather than for the four real-valued subsystems obtained by separation, so as to obtain more economical control gains and derive more concise synchronization conditions.
In Section 2, preliminaries are shown. The FIT synchronization and PET synchronization of CGQVNNs are investigated by quaternion-valued controllers in Section 3 and Section 4, respectively. Two numerical examples are provided to validate the theoretical findings presented in Section 5. Finally, Section 6 offers a concise summary of this paper.
Notation 1.
In this article, , , and are the set denoting all real numbers, the set of all quaternion numbers, the set of all n-dimensional real column vectors and the set of all n-dimensional quaternion column vectors, respectively. Denote , . For any , , , . For a discontinuous function , and are the left and right limits of at point , respectively. and denote as the minimum and the maximum of and . The convex hull is defined as , , , .
2. Model Description and Preliminaries
In this paper, the following CGQVNN is considered
where is the state of the pth unit at time t, is an amplification function, is the feedback self-connection weight, , are the connection weights from the q-th neuron to the p-th neuron, and are discontinuous quaternion activation functions without and with time delay, is the generalized time delay, denotes the external input function, is the initial state of the network (1), in which . Then, the response system of the system (1) is governed by
where the parameters in system (2) are the same as system (1), is the control input needed to be designed later.
Assumption 1.
For , and are continuous except on the sets of countable isolate points and , respectively, and , and , exist. Moreover, there are a finite number of jump points at most for and in every bounded compact interval.
Assumption 2.
For any , and there exists a constant such that
Remark 1.
Note, that the time delay in the system (1) is a general and unified delay type. Actually, if , the time delay in this article will degenerate into a discrete constant time delay [7]. If with , the time delay in this article will degenerate into a discrete time-varying delay [14]. If with , the time delay in this article will reduce to the proportional delay [9]. In other words, the time delay proposed in this paper involves the traditional discrete-time delay and proportional delay.
Definition 1
([41]). A continuous function vector is called a solution of system (1) on if
(1) is absolutely continuous on .
(2) There exist measurable functions and satisfying , , such that
for a.e. .
Similarly, for the response system (2), there exist measurable functions and satisfying , , such that
for a.e. .
Assumption 3.
For any , , functions , , satisfy
where , , , , , .
Remark 2.
For several decades, many excellent results were concerned with the real-valued and complex-valued networks with [41,42]. However, the theory and methods in these existing works cannot be directly used to investigate CGQVNNs. On the one hand, it is not easy to ensure the monotonicity of the inverse function of if . On the other hand, it is difficult to construct suitable Lyapunov functions to drive the FIT synchronization of CGQVNN due to the presence of special multiplications of quaternions with non-commutativity. Thus, a new and effective method will be proposed in this paper to deal with these problems.
Definition 2
Definition 3.
Definition 4
([44]). For a quaternion variable , the signum function is defined as
Based on Definition 1, , the convex hull of is defined by
where
and .
Lemma 1
([43]). Assume that there exists a positive definite, regular and radially unbounded function such that
where , , , and , then the following conclusions are true.
- (i)
- If then for where
- (ii)
- If and then for wherewhere , , the incomplete Beta function ratio was given in [43].
Lemma 2
([43]). If there exist a positive, regular and radially unbounded function and such that
then for where
Lemma 3
([43]). Assume that for , and , then
Lemma 4
([44]). For any , , the following properties hold
- (1)
- .
- (2)
- .
- (3)
- .
- (4)
- .
Lemma 5
([41]). For any , one has
- (1)
- ,
- (2)
- .
3. Fixed-Time Synchronization
In this section, two different controllers are designed to discuss the FIT synchronization of the CGQVNNs (1) and (2).
For convenience, denote
Firstly, based on the 1-norm, the control scheme is designed by
where , , , .
Theorem 1.
- (1)
- (2)
Proof.
Consider the Lyapunov function based on 1-norm as follows
where .
According to the system (5), one obtains
According to Assumptions 3 and 4 and Lemmas 4 and 5,
Similarly,
and
further,
Especially, if the amplification function , system (1) is degenerated to QVNN as follows
Correspondingly, the response system is degenerated to
To realize FIT synchronization, the controller is redesigned by
where , , , .
Based on the analysis of Theorem 1, the following corollary can be readily derived.
Corollary 1.
- (1)
- (2)
In the following, the FIT synchronization of systems (1) and (2) will be investigated based on 2-norm, the controller is designed as
where for any , and .
Theorem 2.
- (1)
- (2)
Proof.
Consider the following 2-norm-based Lyapunov function
where .
To obtain the synchronization criteria of systems (14) and (15) based on 2-norm, the controller is designed as
where , , , , .
According to Theorem 2, the following corollary is easily obtained.
Corollary 2.
- (1)
- (2)
Remark 3.
The FIT synchronization of QVNNs with or without time delay was discussed in [24,25], in which the original QVNN was divided into four real-valued subnetworks. Different from the above theoretical analysis method, a non-separation method is proposed in this paper, which greatly reduces the complexity of the analysis. Besides, several control strategies are designed based on the quaternion-valued sign function to realize the FIT synchronization of CGQVNNs, which can extremely reduce control costs and obtain higher accuracy estimation of ST. Furthermore, the time delay considered in this paper integrates discrete constant delay, discrete time-varying delay and proportional delay, which is more general and widely applicable.
4. Preassigned-Time Synchronization
To achieve the PET synchronization of CGQVNNs (1) and (2), the controller is proposed by
where for any , , and
Theorem 3.
Proof.
Similar to the analysis of Theorem 1, one can obtain
Corollary 3.
Based on 2-norm, the control scheme is designed by
where for any , , and
Theorem 4.
Similarly, the following corollary can be drawn.
Corollary 4.
Remark 4.
Compared with the results presented in [16,44], the FNT synchronization of CGQVNNs is readily available when in this paper. In [25], the FIT and PET synchronization of QVNNs has been discussed, in which the original QVNNs was decomposed into four real-valued systems and four corresponding controllers were designed. Obviously, this separation method leads to complex and redundant analysis and calculations. Nevertheless, there are limited relevant results available for discussing the FIT and PET synchronization of CGQVNNs using a non-separation method. In Theorems 1–3, three quaternion-valued controllers (18), (6) and (30) are designed, and the FIT and PET synchronization of CGQVNNs under non-separation are completely solved under the non-separation method. In theoretical analysis, only a few common inequalities and real number operations are utilized, which simplifies the analytical process to some extent.
Remark 5.
In [16], the authors designed an event-triggered controller to realize the FNT synchronization of QVNNs through a non-decomposition method. Inspired by this issue, it is also a challenge to construct event-triggered controllers for the FIT and PET synchronization of CGQVNNs, which will be investigated in the future.
5. Numerical Simulations
In this section, two numerical examples are presented to verify the above theoretical results.
Consider the following CGQVNN with two neurons
in which , , , , where , , , and
The corresponding CGQVNN is given as follows
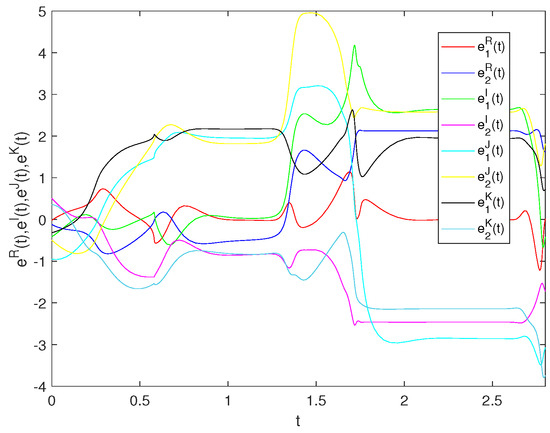
By randomly selecting the initial values, the synchronization error of CGQVNNs (32) and (33) is shown in Figure 1 without control.
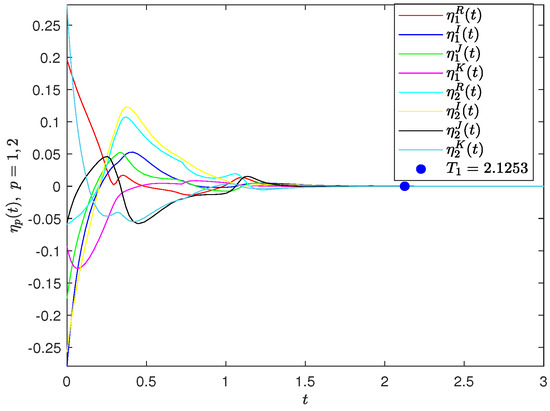
First of all, consider the synchronization of driven-response CGQVNNs (32) and (33) with the controller (8). According to calculation, , for any and . In (8), select , . It is not difficult to verify that
By means of Theorem 1, the driven-response CGQVNNs (32) and (33) achieve FXT synchronization, here the settling time is estimated by . The synchronization result is simulated in Figure 2.
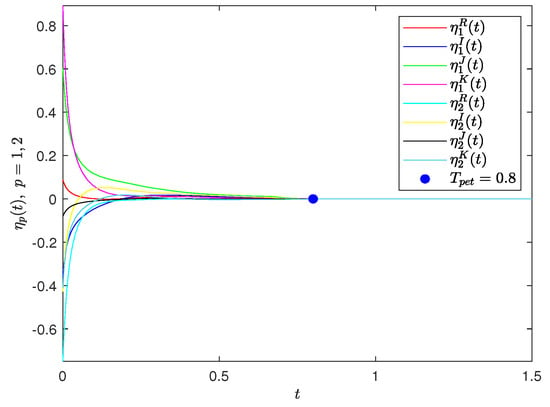
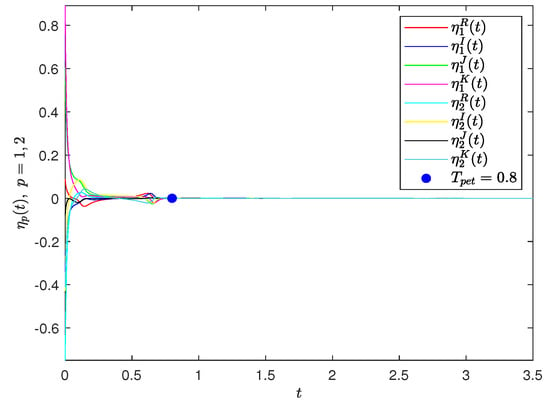
Furthermore, choose in (38). Under the above-selected parameters, CGQVNNs (32) and (33) reach PET synchronization with according to Theorem 3, which is demonstrated in Figure 3.
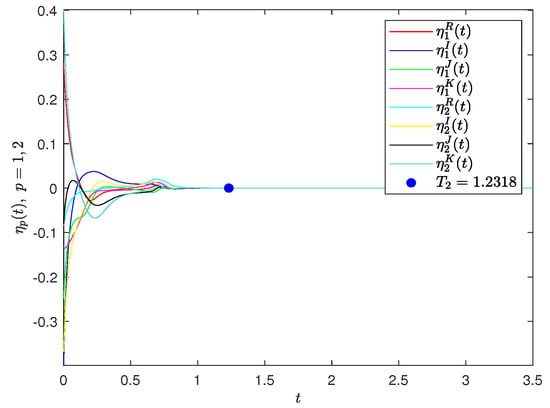
Next, let us verify the FIX synchronization of driven-response CGQVNNs (32) and (33) under a 2-norm-based controller (24). By simple calculation, for any and . In (8), select . Thus,
Therefore, CGQVNNs (32) and (33) achieve FIX synchronization based on the controller (24) by using Theorem 2, and the settling time is estimated by . The synchronization result is given in Figure 4.
6. Conclusions
In this article, the FIT and PET synchronization of CGQVNNs with discontinuous activation functions and generalized time delays have been investigated. In contrast to the previous CGNN models defined in the real-valued or complex-valued domain [34,35,36], the proposed quaternion-valued neural network has stronger storage capacity and is suitable for NNs with discontinuous activation functions. Based on the introduced quaternion-valued symbolic function, two direct control schemes were proposed. At the same time, the criteria of the FIT and the PET synchronization of the CGQVNNs were derived without dividing the quaternion-valued system into real-valued or complex-valued systems. Compared with [24,25], the non-separation method proposed in this paper greatly reduces the computational complexity, and the direct control scheme saves control costs. Finally, two numerical examples were provided to validate the theoretical results.
Considering the control cost, future work will focus on the discussion of FIT or PET synchronization of quaternion-valued NNs by developing a reasonable event-triggered controller, intermittent controller or impulsive controller to reduce the control cost.
Author Contributions
Conceptualization, H.J.; Methodology, C.H.; Validation, H.J.; Formal analysis, S.J.; Writing—original draft, S.J.; Writing—review & editing, C.H.; Supervision, C.H. and H.J.; Funding acquisition, H.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported jointly by National Natural Science Foundation of China (62163035), by the Key Project of Natural Science Foundation of Xinjiang (2021D01D10), by the Special Project for Local Science and Technology Development Guided by the Central Government (ZYYD2022A05), by Tianshan Talent Program (2022TSYCLJ0004), by Excellent Doctor Innovation program of Xinjiang University (XJUBSCX-201929).
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Miron, S.; Flamant, J.; Bihan, N.L.; Chainais, P.; Brie, D. Quaternions in Signal and Image Processing: A comprehensive and objective overview. IEEE Signal Process. Mag. 2023, 40, 26–40. [Google Scholar] [CrossRef]
- Guizzo, E.; Weyde, T.; Comminiello, D. Learning speech emotion representations in the quaternion domain. IEEE/Acm Trans. Audio Speech Lang. Process. 2023, 31, 1200–1212. [Google Scholar] [CrossRef]
- Bayro-Corrochano, E.; Lechuga-Gutierrez, L.; Garza-Burgos, M. Geometric techniques for robotics and HMI: Interpolation and haptics in conformal geometric algebra and control using quaternion spike neural networks. Robot. Auton. Syst. 2018, 104, 72–84. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Z.; Chen, D.; Zhu, S.; Xu, D. Quaternion Extreme Learning Machine Based on Real Augmented Representation. IEEE Signal Process. Lett. 2023, 30, 175–179. [Google Scholar] [CrossRef]
- Zhou, Y.; Jin, L.; Ma, G.; Xu, X. Quaternion capsule neural network with region attention for facial expression recognition in color images. IEEE Trans. Emerg. Top. Comput. Intell. 2022, 6, 893–911. [Google Scholar] [CrossRef]
- Liu, J.; Liao, X.; Dong, J. A quaternion-valued neural network approach to nonsmooth nonconvex nonstrained optimization in quaternion domain. IEEE Trans. Emerg. Top. Comput. Intell. 2023, 1–16. [Google Scholar] [CrossRef]
- Aouiti, C.; Touati, F. Global dissipativity of quaternion-valued fuzzy cellular fractional-order neural networks with time delays. Neural Process. Lett. 2023, 55, 481–503. [Google Scholar] [CrossRef]
- Li, R.; Cao, J. Dissipativity and synchronization control of quaternion-valued fuzzy memristive neural networks: Lexicographical order method. Fuzzy Sets Syst. 2021, 443, 70–89. [Google Scholar] [CrossRef]
- Song, Q.; Yang, L.; Liu, Y.; Alsaadi, F. Stability of quaternion-valued neutral-type neural networks with leakage delay and proportional delays. Neurocomputing 2022, 521, 191–198. [Google Scholar] [CrossRef]
- Rezaie, A.; Mobayen, S.; Ghaemi, M.; Fekih, A.; Zhilenkov, A. Design of a Fixed-Time Stabilizer for Uncertain Chaotic Systems Subject to External Disturbances. Mathematics 2023, 15, 3273. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Z. Asymptotic stability for quaternion-valued fuzzy BAM neural networks via integral inequality approach. Chaos Solitons Fractals 2023, 169, 113227. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, S.; Liu, X.; Wen, S. Mittag-Leffler stability of fractional-order quaternion-valued memristive neural networks with generalized piecewise constant argument. Neural Net. 2023, 162, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.; Das, S.; Chouhan, S.; Cao, J. Anti-synchronization of inertial neural networks with quaternion-valued and unbounded delays: Non-reduction and non-separation approach. Knowl.-Based Syst. 2023, 278, 110903. [Google Scholar] [CrossRef]
- Zhao, M.; Li, H.; Zhang, L.; Hu, C.; Jiang, H. Quasi-synchronization of discrete-time fractional-order quaternion-valued memristive neural networks with time delays and uncertain parameters. Appl. Math. Comput. 2023, 453, 128095. [Google Scholar] [CrossRef]
- Xiao, J.; Cao, J.; Cheng, J.; Zhong, S.; Wen, S. Novel methods to finite-time Mittag-Leffler synchronization problem of fractional-order quaternion-valued neural networks. Inf. Sci. 2020, 526, 221–244. [Google Scholar] [CrossRef]
- Ping, J.; Zhu, S.; Shi, M.; Wu, S.; Shen, M.; Liu, X.; Wen, S. Event-triggered finite-time synchronization control for quaternion-valued memristive neural networks by an non-decomposition method. IEEE Trans. Netw. Sci. Eng. 2023, 10, 3609–3619. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Sadik, H.; Abdurahman, A.; Tohti, R. Fixed-time synchronization of reaction-diffusion fuzzy neural networks with stochastic perturbations. Mathematics 2023, 6, 1493. [Google Scholar] [CrossRef]
- Yang, W.; Xiao, L.; Huang, J.; Yang, J. Fixed-time synchronization of neural networks based on quantized intermittent control for image protection. Mathematics 2021, 23, 3086. [Google Scholar] [CrossRef]
- Pang, L.; Hu, C.; Yu, J.; Jiang, H. Fixed-time synchronization for fuzzy-based impulsive complex networks. Mathematics 2022, 9, 1533. [Google Scholar] [CrossRef]
- Pu, H.; Li, F. Fixed/predefined-time synchronization of complex-valued discontinuous delayed neural networks via non-chattering and saturation control. Physical A 2022, 610, 128425. [Google Scholar] [CrossRef]
- Wu, E.; Wang, Y.; Li, Y.; Li, K.; Luo, F. Fixed-Time Synchronization of Complex-Valued Coupled Networks with Hybrid Perturbations via Quantized Control. Mathematics 2023, 18, 3845. [Google Scholar] [CrossRef]
- Cheng, Y.; Hu, T.; Xu, W.; Zhang, X.; Zhong, S. Fixed-time synchronization of fractional-order complex-valued neural networks with time-varying delay via sliding mode control. Neurocomputing 2022, 505, 339–352. [Google Scholar] [CrossRef]
- Deng, H.; Bao, H. Fixed-time synchronization of quaternion-valued neural networks. Physical A 2019, 527, 121351. [Google Scholar] [CrossRef]
- Wei, R.; Cao, J. Fixed-time synchronization of quaternion-valued memristive neural networks with time delays. Neural Net. 2019, 113, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Wei, W.; Yu, J.; Wang, L.; Hu, C.; Jiang, H. Fixed/Preassigned-time synchronization of quaternion-valued neural networks via pure power-law control. Neural Net. 2021, 146, 341–349. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yang, L.; Kou, K.; Liu, Y. Fixed-time synchronization for quaternion-valued memristor-based neural networks with mixed delays. Neural Net. 2023, 165, 274–289. [Google Scholar] [CrossRef]
- Peng, T.; Wu, Y.; Tu, Z.; Alofi, A.; Lu, J. Fixed-time and prescribed-time synchronization of quaternion-valued neural networks: A control strategy involving Lyapunov functions. Neural Net. 2023, 160, 108–121. [Google Scholar] [CrossRef]
- Li, X.; Wu, H.; Cao, J. Prescribed-time synchronization in networks of piecewise smooth systems via a nonlinear dynamic event-triggered control strategy. Math. Comput. Simul. 2022, 203, 647–668. [Google Scholar] [CrossRef]
- Liu, X.; Ho, D.; Xie, C. Prespecified-time cluster synchronization of complex networks via a smooth control approach. IEEE Trans. Cybern. 2020, 50, 1771–1775. [Google Scholar] [CrossRef]
- Shao, S.; Liu, X.; Cao, J. Prespecified-time synchronization of switched coupled neural networks via smooth controllers. Neural Net. 2020, 133, 32–39. [Google Scholar] [CrossRef]
- Yang, J.; Chen, G.; Zhu, S.; Wen, S.; Hu, J. Fixed/prescribed-time synchronization of BAM memristive neural networks with time-varying delays via convex analysis. Neural Net. 2023, 163, 53–63. [Google Scholar] [CrossRef] [PubMed]
- Tan, F.; Zhou, L.; Xia, J. Adaptive quantitative exponential synchronization in multiplex Cohen–Grossberg neural networks under deception attacks. J. Frankl. Inst. 2022, 359, 10558–10577. [Google Scholar] [CrossRef]
- Jamal, M.; Kumar, R.; Mukhopadhyay, S.; Kwon, O. Fixed-time stability of Cohen–Grossberg BAM neural networks with impulsive perturbations. Neurocomputing 2023, 550, 126501. [Google Scholar] [CrossRef]
- Kong, F.; Zhu, Q.; Karimi, H. Fixed-time periodic stabilization of discontinuous reaction-diffusion Cohen–Grossberg neural networks. Neural Net 2023, 166, 354–365. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Chen, X.; Ye, R.; Stamova, I.; Cao, J. Adaptive quasi-synchronization analysis for Caputo delayed Cohen–Grossberg neural networks. Math. Comput. Simul. 2023, 212, 49–65. [Google Scholar] [CrossRef]
- Clarke, F. Optimization and Nonsmooth Analysis; Wiley: New York, NY, USA, 1983. [Google Scholar]
- Filippov, A. Differential Equations with Discontinuous Right-Hand Sides; Kluwer: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Huang, L.; Guo, Z.; Wang, J. Theory and Applications of Differential Equations with Discontinuous Right-Hand Sides; Science Press: Beijing, China, 2011. [Google Scholar]
- Aubin, J.; Frankowska, H. Set-Valued Analysis; Birkhäuser: Boston, MA, USA, 1990. [Google Scholar]
- Wei, W.; Hu, C.; Yu, J.; Jiang, H. Fixed/preassigned-time synchronization of quaternion-valued neural networks involving delays and discontinuous activations: A direct approach. Acta Math. Sci. 2022, 43, 1439–1461. [Google Scholar] [CrossRef]
- Liu, H.; Cheng, J.; Cao, J.; Katib, I. Preassigned-time synchronization for complex-valued memristive neural networks with reaction-diffusion terms and Markov parameters. Neural Net. 2023, 169, 520–531. [Google Scholar] [CrossRef]
- Hu, C.; He, H.; Jiang, H. Fixed/Preassigned-time synchronization of complex networks via improving fixed-time stability. IEEE Trans. Cybern. 2021, 51, 2882–2892. [Google Scholar] [CrossRef]
- Li, Z.; Liu, X. Finite time anti-synchronization of quaternion-valued neural networks with asynchronous time-varying delays. Neural Process. Lett. 2020, 52, 2253–2274. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).