Abstract
In this paper, we construct approximate normal forms of the double-zero bifurcation for a two-parameter jerk system exhibiting a non-degenerate fold bifurcation. More precisely, using smooth invertible variable transformations and smooth invertible parameter changes, we obtain normal forms that are also jerk systems. In addition, we discuss some of their parametric portraits.
MSC:
70K45; 70K50
1. Introduction
The double-zero bifurcation, also called the Bogdanov–Takens bifurcation, can occur in a continuous-time dynamical system when the system has at the critical value of an equilibrium point with two zero eigenvalues and no other eigenvalues on the imaginary axis (see, e.g., [1,2]).
The double-zero bifurcation can be met, for instance, in mechanical, electrical, and biological systems. For example, the analysis of mathematical models of an internally constrained planar beam equipped with a lumped visco–elastic device and loaded by a follower force [3] or of a non-linear cantilever beam that is externally damped and made of a visco–elastic material [4] reveals among other solutions the existence of a double-zero bifurcation. Oscillators and electronic circuits are modeled by differential equations, and in some cases, they experience a double-zero bifurcation (see, e.g., [5,6,7]). Also, a double-zero bifurcation appears in some chemical reactions (see, e.g., [8,9]) and in fluid mechanics (see, e.g., [10,11]).
The importance of the double-zero bifurcation is highlighted by the following remark: “One of the most important features of the Takens–Bogdanov bifurcation is that it warrants the existence of global connections in its vicinity (a homoclinic orbit in the non-symmetric case and a homoclinic or a heteroclinic orbit if the system is symmetric)” [12].
This local bifurcation was first analyzed by Bogdanov [13] and Takens [14] in the case Several normal forms of this bifurcation were reported in this case (see, e.g., [1]). In fact, such a normal form is “the simplest parameter-dependent form to which any generic two-parameter system exhibiting the bifurcation can be transformed by smooth invertible changes of coordinates and parameters and (if necessary) time reparametrizations” [2]. Approximate normal forms are obtained by truncation of higher-order terms. In the n-dimensional case , the study of the double-zero bifurcation is carried out by reduction on a local center manifold to the planar case. It is natural to ask whether such a reduction can be avoided, i.e., whether
dimensional normal forms can be obtained. We will give an affirmative answer for
In this paper, we consider the jerk system
where j is smooth and are parameters. Our goal is to obtain normal forms and approximate normal forms for the double-zero bifurcation of system (1), which is also a jerk system.
Particular cases of jerk systems have been widely investigated. Among topics, we recall local stability and bifurcations [15,16,17,18,19,20,21,22], chaotic behavior [23,24,25,26], and image encryption and cryptography [27,28].
2. The Fold Curve
Assume there are such that system (1) displays a non-degenerate fold bifurcation when passes through the critical value and is fixed. Following [21], sufficient conditions are given below:
- F1.
- There is at the critical value an equilibrium point of system (1) with a simple zero eigenvalue and no other eigenvalues on the imaginary axis, i.e., , , , ;
- F2.
- The transversality condition ;
- F3.
- The nondegeneracy condition ;
where We have denoted: , ,
It is known that if the fold conditions hold, then “generically, there is a bifurcation curve in the -plane along which the system has an equilibrium exhibiting the same bifurcation” [2]. For the sake of completeness, we prove this result in our case.
Lemma 1.
Proof.
Considering the coordinates , is the intersection of two surfaces. Clearly, belongs to this intersection. Since
where , is a curve passing through . Moreover, since , and by the Implicit Function Theorem (IFT), there are the functions in a neighborhood of such that and which verify the equations of Hence, is a parametrization of in a neighborhood of . In addition, for all , is an equilibrium point of system (1) and by continuity, the other fold conditions will be satisfied. Consequently, the construction can be repeated to extend the curve further.
The projection will give the fold bifurcation curve . □
3. The Double-Zero Bifurcation
In this section, we deduce jerk approximate normal forms for the double-zero bifurcation of a jerk system. Also, we give parametric portraits of these.
When the parameters and vary simultaneously to track the bifurcation curve , another real eigenvalue can approach the imaginary axis, which leads to a double-zero bifurcation generally.
Consider the following mechanism of the double-zero bifurcation: Let be the fold bifurcation curve given by Lemma 1. The parameter varies such that is an equilibrium point that fulfills the conditions –. Taking into account the characteristic polynomial of the equilibrium of system (1), namely
where we assume there is a unique and consequently a unique pair such that
Therefore, we get the equilibrium with a double-zero eigenvalue when passes through the critical value . Obviously, we can consider instead of
In the following, we consider and ; we denote and . We are concerned with local properties: that is, moves in the parametric plane with being sufficiently small.
First, we use Taylor’s expansion of the function j with respect to at :
where . We have , ,
Now we try to find such that one of the linear terms vanishes via IFT. We have two cases.
Case I. The annihilation of the term proportional to y.
Let
We have and Imposing the condition , we can apply IFT; thus, there is the function with such that in the neighborhood of . Moreover
We replace the above in (3), and then we expand in Taylor series with respect to at , knowing that , , , , . We have
Consider the change in parameters near the origin given by
The above the map is regular if
which is equivalent in our hypothesis to the regularity of the map
at the origin.
We denote Since , this results in near Using the transformation
and
system (4) can be written as
where , , , .
In conclusion, we have obtained the following theorem.
Theorem 1.
Let the jerk system where j is smooth.
Assume that the following conditions are fulfilled:
- DZ1.
- , , , ;
- DZ2.
- ;
- DZ3.
- , ;
- DZ4.
- The map is regular at .
Then the considered system has at the equilibrium with a double-zero eigenvalue and there are smooth invertible variable transformations and smooth invertible parameter changes, which together reduce the system to
where , , and φ is a smooth function with
Remark 1.
We notice the similarity between the reduced jerk system (6) and Bogdanov’s normal form of the double-zero bifurcation on given by (see, e.g., [2])
Because and the local stability and some local bifurcations are related to the coefficients of the characteristic polynomial, we conclude that for a jerk system, an approximate normal form for the double-zero bifurcation is given by the system
where are fixed.
It is easy to see that if , system (8) has two equilibria , , which collide when and then disappear for . Moreover, the characteristic polynomial at is given by
The fold curve is , and iff
Following [21], if the characteristic polynomial has the form then the Hopf bifurcation occurs if ; hence, it cannot occur at
For , let
Assume . At , we obtain the Hopf bifurcation curve
which depends on c and In fact, is half of the parabola for the negative semi-axis for , and the positive semi-axis for Moreover, for , we get that is an unstable equilibrium point with a two-dimensional stable manifold; thus, it does not bifurcate.
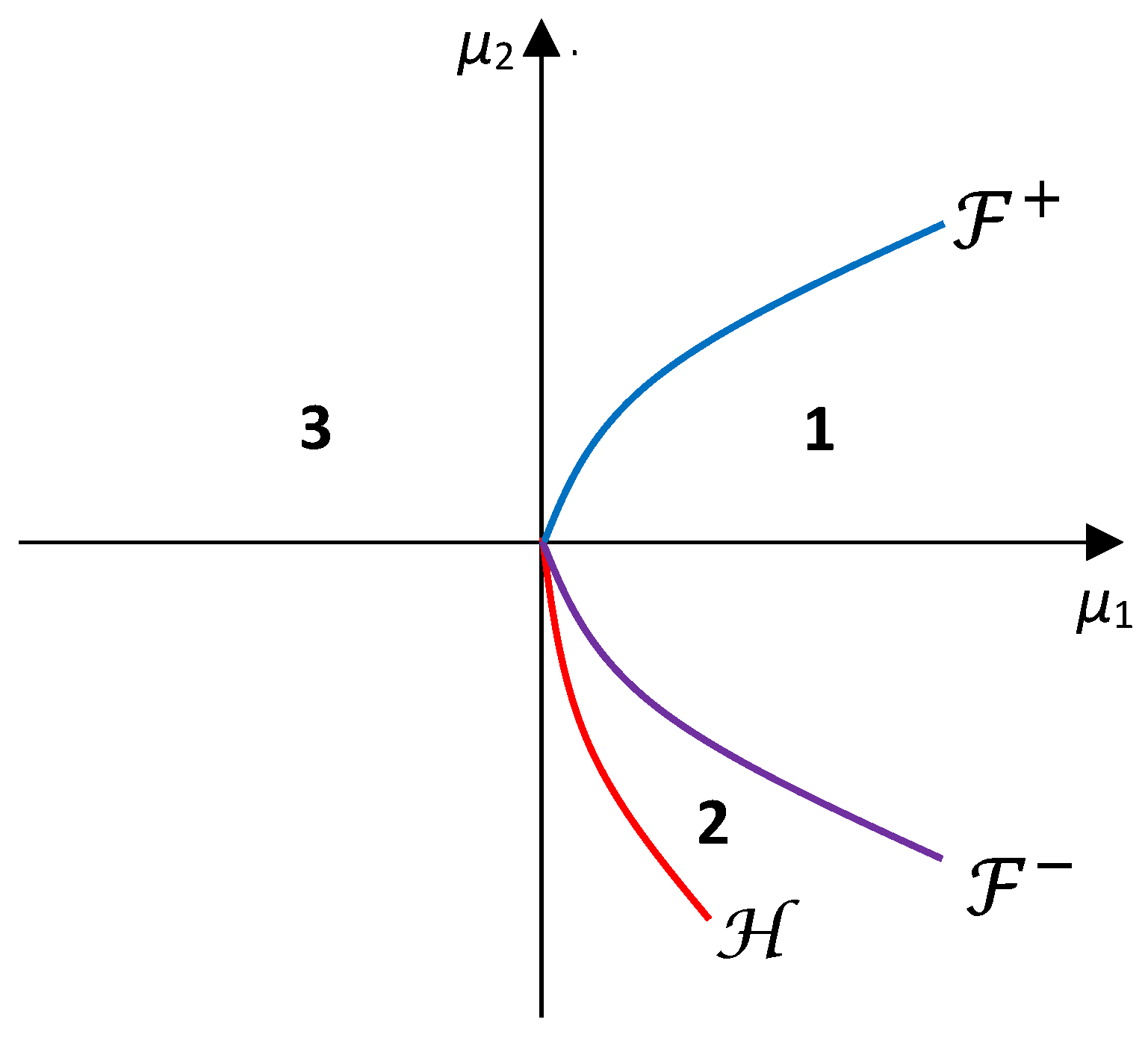
Now, let . Consider the parametric portrait given in Figure 1, where is the above Hopf curve and are the branches of the fold curve separated by the double-zero point .
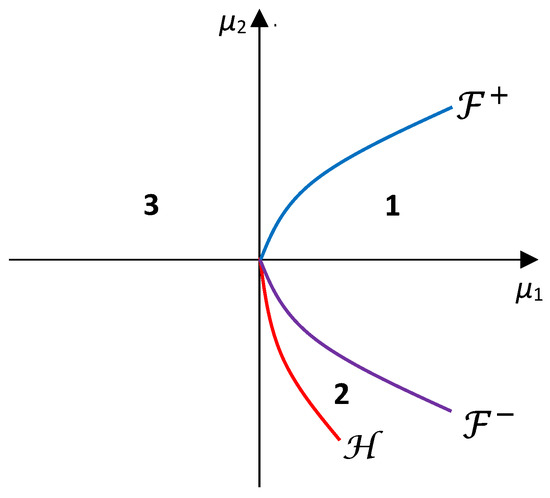
Figure 1.
The parametric portrait for local bifurcations of system (8) for .
In region 1, there are no equilibrium points. On the curve , an equilibrium is born and splits into the asymptotically stable node (or focus-node) and the unstable saddle (or saddle-focus) in the region 2. Hence system (8) displays a saddle–node bifurcation when crosses the fold curve . In region 3, is an unstable equilibrium point with a one-dimensional stable manifold; hence, it loses stability when the curve is crossed. Moreover, a Hopf bifurcation occurs, and a stable limit cycle is born (we assume that the first Lyapunov coefficient does not vanish). The unstable equilibria and collide when and then disappear when returning to region 1; thus, a degenerate fold bifurcation occurs. We conclude that there are no other local bifurcations in the dynamics of system (8) in the case
We notice that the above scenario is similar to that which takes place for Bogdanov’s normal form (7) (see [2]). As is pointed out in [2], “…finally return to region 1, no limit cycles must remain. Therefore, there must be global bifurcations ’destroying’ the cycle somewhere between and ”. Consequently, a global bifurcation has to occur for system (8) in this case.
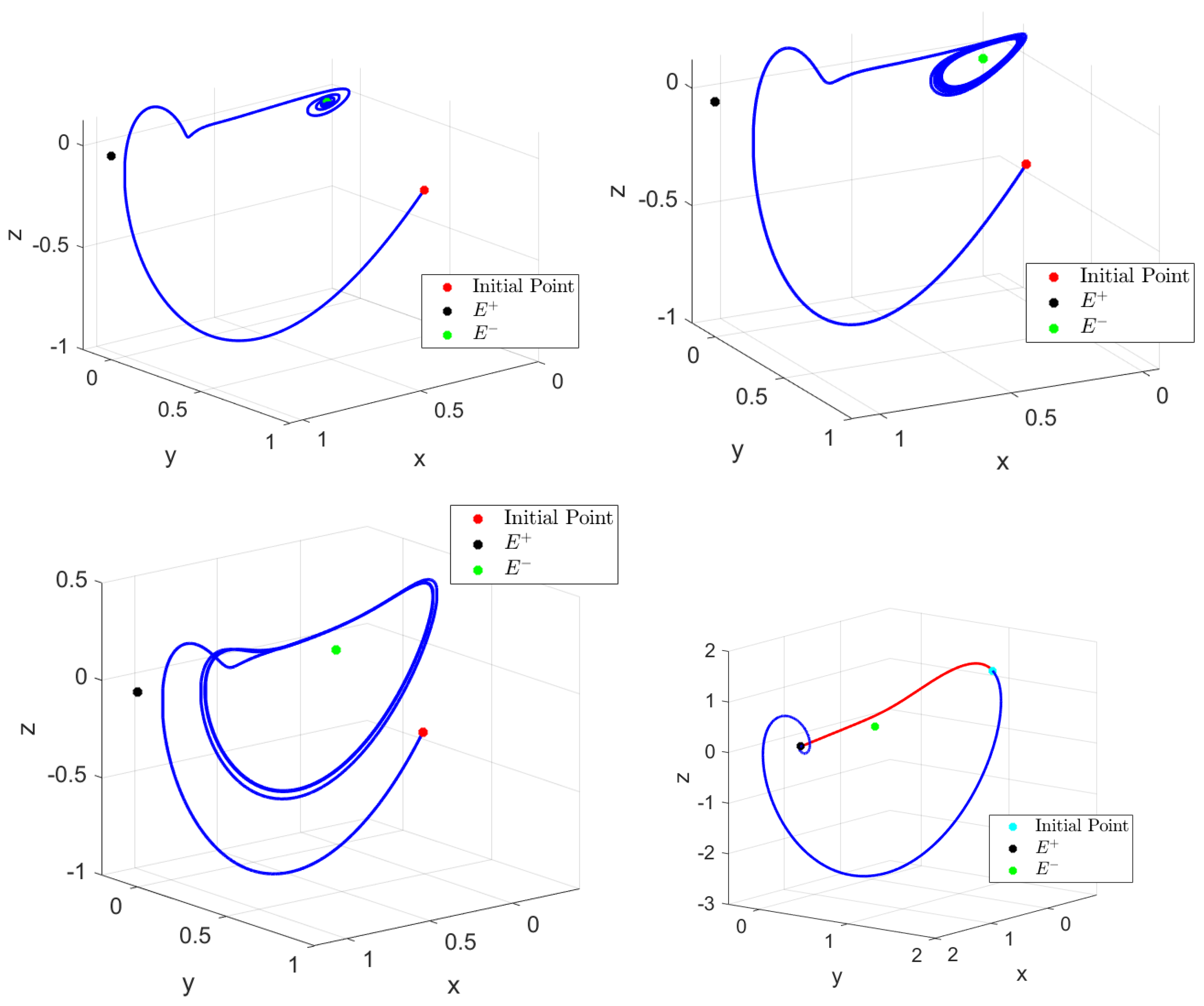
In Figure 2, we present such a homoclinic bifurcation obtained by numerical simulations. We fix , and we vary the parameter . Considering the initial point , we obtain an asymptotically stable orbit for , which turns into a stable limit cycle at the above-mentioned Hopf curve. The limit cycle deforms (, ) and finally becomes a homoclinic orbit (plotted here for using the initial point : the red part of the homoclinic orbit corresponds to and the blue one to ).
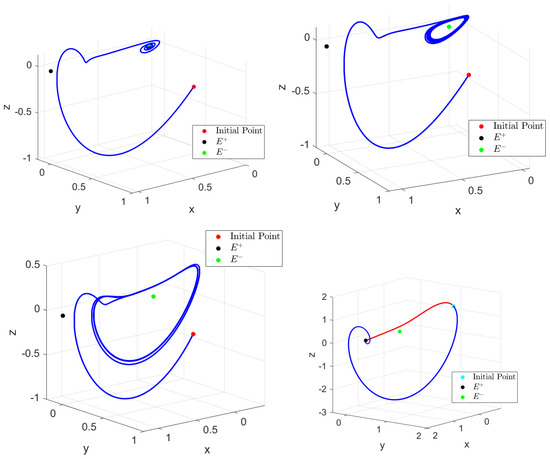
Figure 2.
The transition from an asymptotically stable orbit to a homoclinic orbit of system (8) via limit cycles for .
In the cases for which we obtain similar parametric portraits. The difference is that the regions 2 and 3 and the curves and change their roles.
Now, assume that . We obtain that is an unstable equilibrium point with an one-dimensional stable manifold; thus, it does not bifurcate. Moreover, in this case system (8) does not experience a Hopf bifurcation.
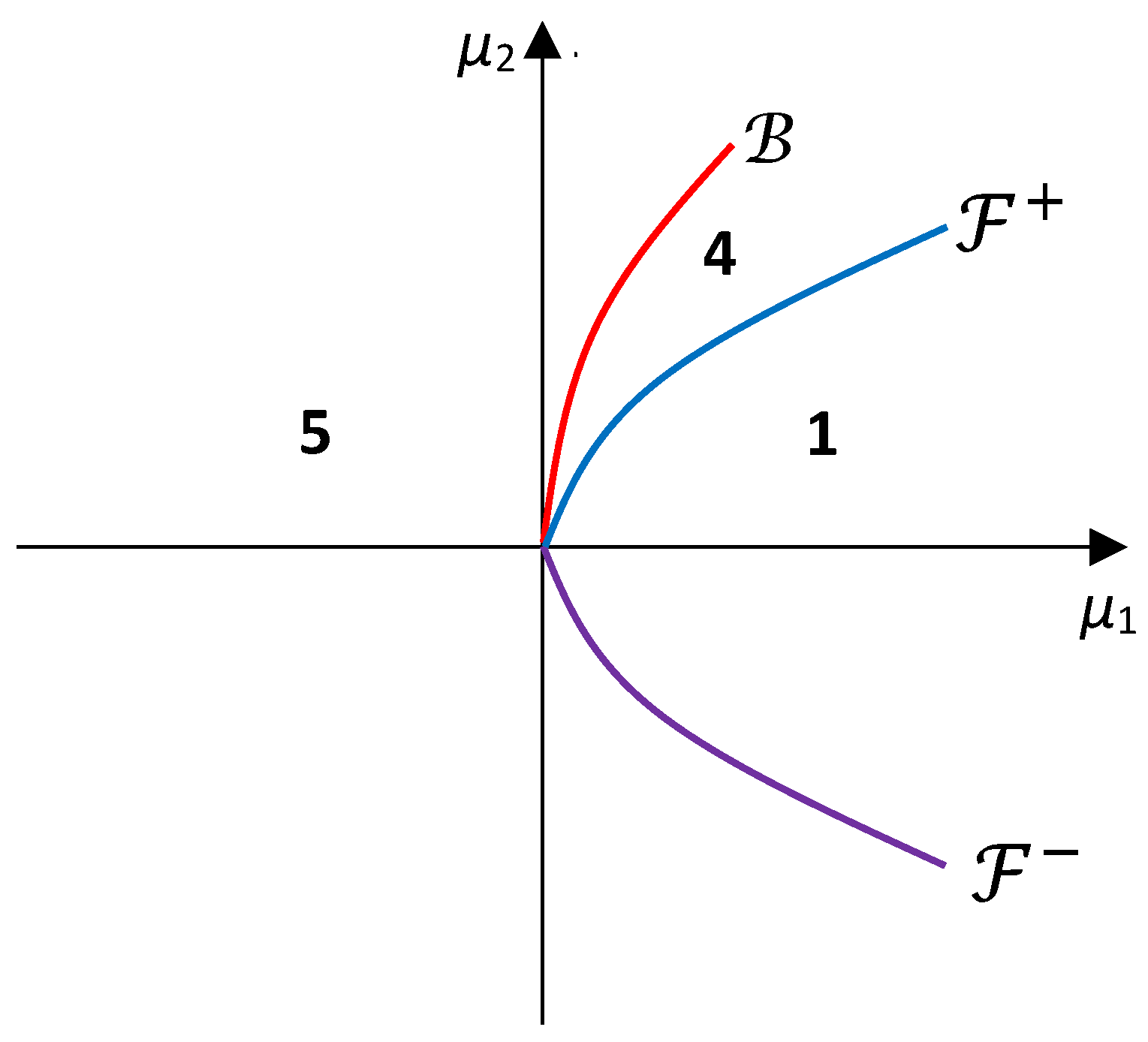
Let , and the parametric portrait given in Figure 3, where is half of the parabola with and , is as above.
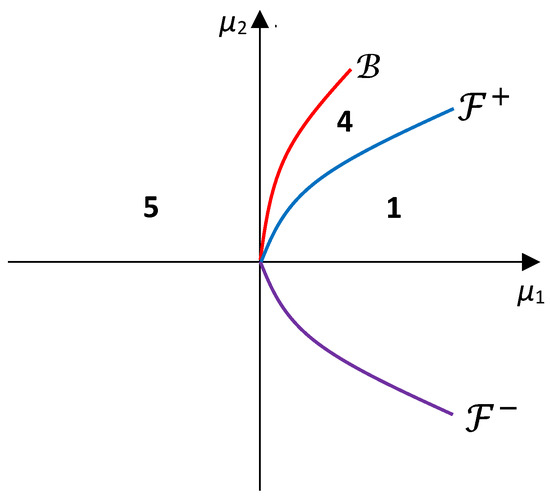
Figure 3.
The parametric portrait for local bifurcations of system (8) for .
Again, there are no equilibrium points in region 1. Crossing the curve , an equilibrium is born and separates into the unstable node (or focus-node) and the unstable saddle (or saddle-focus) in region 4. Since both equilibria are unstable, system (8) does not display a saddle–node bifurcation in the classic sense: that is, a stable node and a saddle coalesce. Anyway, a fold bifurcation occurs in the considered dynamics. In region 5, is an unstable equilibrium point with a two-dimensional stable manifold. Therefore, crossing the curve , the dimension of the stable manifold of changes. The saddles and collide when crosses and then disappear when returning to region 1; thus, a degenerate fold bifurcation occurs. We conclude that there are no other local bifurcations in the dynamics of system (8) in this case. Similar bifurcation diagrams are obtained when .
Case II. The annihilation of the term proportional to .
Let
We have and By IFT, there is a function with such that in the neighborhood of Moreover,
We proceed as in the previous case. Now we consider the change in parameters near the origin given by
The above map is regular in if the map
is also regular at .
Consequently, system (2) is transformed into the system given in the next theorem.
Theorem 2.
Let the jerk system where j is smooth.
Assume that the following conditions are fulfilled:
- DZ1.
- , , , ;
- DZ2.
- ;
- DZ3.
- ;
- DZ4.
- The map is regular at .
Then the considered system has at the equilibrium with a double-zero eigenvalue, and there are smooth invertible variable transformations and smooth invertible parameter changes, which together reduce the system to
where , , and φ is a smooth function with
Remark 2.
In this case, the reduced jerk system (9) is similar to the normal form of the double-zero bifurcation on given by Guckenheimer and Holmes [1]:
Now, we consider for a jerk system another approximate normal form for the double-zero bifurcation given by the system
where are fixed.
If , system (10) has two equilibria , which coalesce when and then disappear for . The characteristic polynomial at is given by
The fold curve is , and iff
The Hopf bifurcation cannot occur at For , we denote ,
Let . It follows that is an unstable equilibrium point with a two-dimensional stable manifold; thus, it does not bifurcate.
At , we obtain the Hopf bifurcation curve
In fact, is half of the parabola for and the negative semi-axis for .
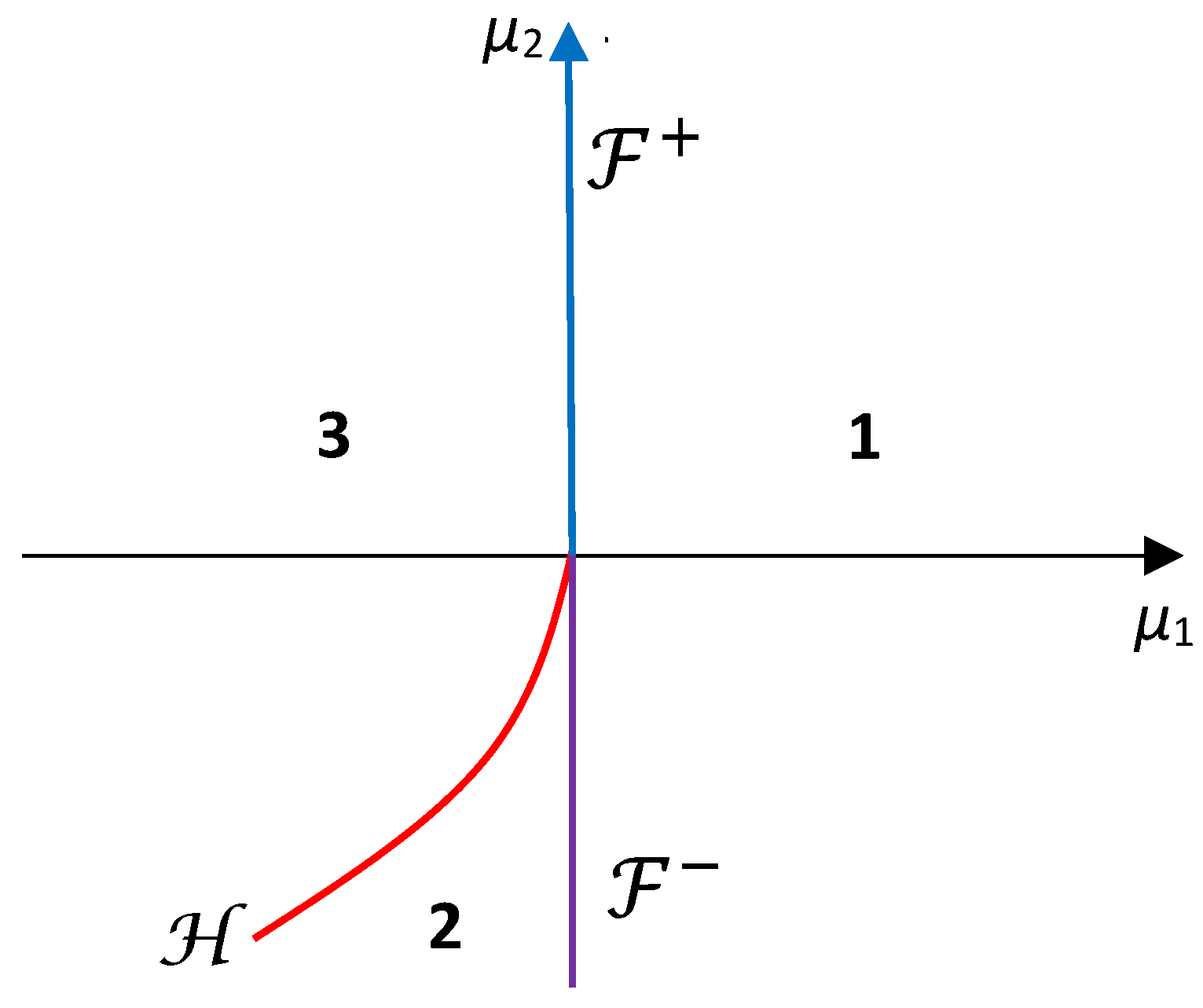
Now, let . We obtain the parametric portrait given in Figure 4, where is the above Hopf curve and are the branches of the fold curve separated by the double-zero point . Also, the behavior of system (10) in each region is the same as of system (8) in the case (see Case 1). For we obtain similar parametric portraits.
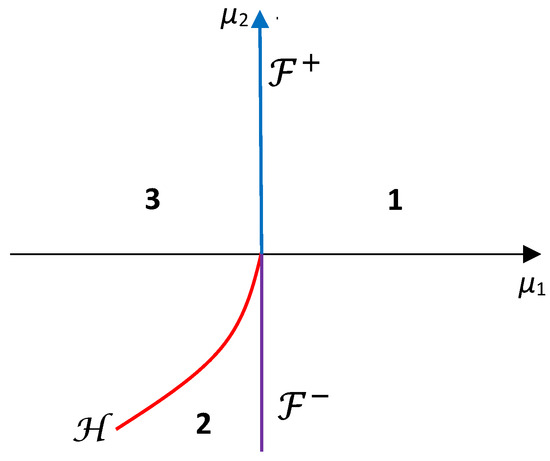
Figure 4.
The parametric portrait for local bifurcations of system (10) for .
In the case , we obtain that is an unstable equilibrium point with a one-dimensional stable manifold; thus, it does not bifurcate. In addition, a Hopf bifurcation does not occur in the dynamics of system (10).
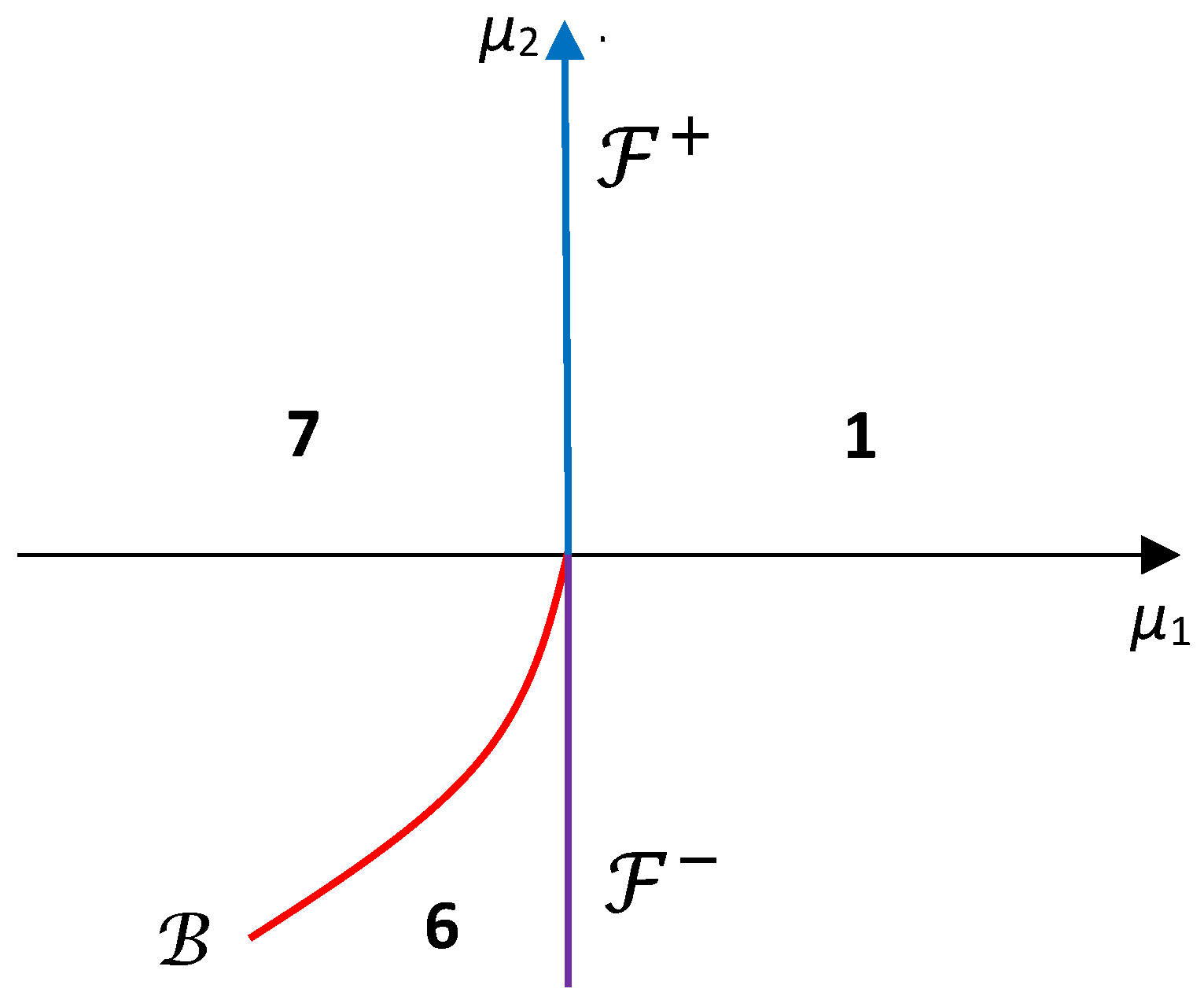
For , we get the parametric portrait given in Figure 5, where is the parabola with and are as above.

Figure 5.
The parametric portrait for local bifurcations of system (10) for .
In this case, there are no equilibrium points in region 1, and an equilibrium appears when . This point splits into the unstable node (or focus-node) and the unstable saddle (or saddle-focus) in the region 6. Crossing the curve , changes its number of negative eigenvalues, and in region 7, it has a two-dimensional stable manifold. The saddles and collide when crosses and then disappear when returning to region 1; thus, a degenerate fold bifurcation occurs. We conclude that there are no other local bifurcations in the dynamics of system (10) in this case. Similar bifurcation diagrams are obtained when .
Remark 3.
It is known that the normal forms for the double-zero bifurcation given by Bogdanov [13], Takens [14], and Guckenheimer and Holmes [1] are equivalent. In our case, the approximate normal forms (8) and (10) have similar parametric portraits. Moreover, if the local bifurcations are the same as those obtained for the Bogdanov normal form (see [2]) and Guckenheimer and Holmes (see [1]), respectively. It remains an open problem to establish if a jerk system and the corresponding approximate normal form are locally topologically equivalent: that is, the construction of a homeomorphism that maps orbits of the first system onto orbits of the second system.
4. Conclusions
In this paper, we have studied the double-zero bifurcation of an arbitrary two-parameter jerk system. This bifurcation is associated with the appearance of two zero eigenvalues. In the two-dimensional case, the behavior of a system that displays such a bifurcation near the critical values of the parameters is given by the behavior of a normal form. For an dimensional dynamical system, particularly a jerk system, a normal form is obtained by reduction on a local center manifold. To avoid this reduction, using invertible coordinate and parameter changes, we have derived approximate normal forms for a double-zero bifurcation of an arbitrary two-parameter jerk system that continues being a jerk system. We have obtained the simplest jerk systems that experience such a bifurcation. In addition, we have given some parametric portraits and have studied the local behavior of these systems.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
I would like to thank the referees very much for their valuable comments and suggestions.
Conflicts of Interest
The author declares no conflict of interest.
References
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, Applied Mathematical Sciences; Springer: Berlin/Heidelberg, Germany, 1983. [Google Scholar]
- Kuznetsov, Y.A. Elements of Applied Bifurcation Theory; Springer: New York, NY, USA, 1998. [Google Scholar]
- Luongo, A.; Di Egidio, A. Divergence, Hopf and double-zero bifurcations of a nonlinear planar beam. Comput. Struct. 2006, 84, 1596–1605. [Google Scholar] [CrossRef]
- Luongo, A.; D’Annibale, F. Double zero bifurcation of non-linear viscoelastic beams under conservative and non-conservative loads. Int. J. Non-Linear Mech. 2013, 55, 128–139. [Google Scholar] [CrossRef]
- Freire, E.; Rodriguez-Luis, A.J.; Gamero, E.; Ponce, E. A case study for homoclinic chaos in an autonomous electronic circuit: A trip from Takens-Bogdanov to Hopf-Šil’nikov. Phys. D Nonlinear Phenom. 1993, 62, 230–253. [Google Scholar] [CrossRef]
- Algaba, A.; Gamero, E.; Rodriguez-Luis, A.J. A bifurcation analysis of a simple electronic circuit. Commun. Nonlinear Sci. Numer. Simul. 2005, 10, 169–178. [Google Scholar] [CrossRef]
- Amador, A.; Freire, E.; Ponce, E. Bifurcation set for a disregarded Bogdanov-Takens unfolding: Application to 3D cubic memristor oscillators. Nonlinear Dyn. 2021, 104, 1657–1675. [Google Scholar] [CrossRef]
- Wang, W.; Lin, Y.; Yang, F.; Zhang, L.; Tan, Y. Numerical study of pattern formation in an extended Gray–Scott model. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2016–2026. [Google Scholar] [CrossRef]
- Su, J.; Xu, B. Local bifurcations of an enzyme-catalyzed reaction system with cubic rate law. Nonlinear Dyn. 2018, 94, 521–539. [Google Scholar] [CrossRef]
- Mellibovsky, F.; Eckhardt, B. Takens–Bogdanov bifurcation of travelling-wave solutions in pipe flow. J. Fluid Mech. 2011, 670, 96–129. [Google Scholar] [CrossRef]
- Sierra, J.; Fabre, D.; Citro, V.; Giannetti, F. Bifurcation scenario in the two-dimensional laminar flow past a rotating cylinder. J. Fluid Mech. 2020, 905, A2. [Google Scholar] [CrossRef]
- Algaba, A.; Dominguez-Moreno, M.C.; Merino, M.; Rodriguez-Luis, A.J. Takens–Bogdanov bifurcations of equilibria and periodic orbits in the Lorenz system. Commun. Nonlinear Sci. Numer. Simul. 2016, 30, 328–343. [Google Scholar] [CrossRef]
- Bogdanov, R.I. Versal deformations of a singular point of a vector field on the plane in the case of zero eigenvalues. Funct. Anal. Appl. 1975, 9, 144–145. [Google Scholar] [CrossRef]
- Takens, F. Forced oscillations and bifurcations. Commun. Math. Inst. Rijksuniv. Utrecht 1974, 2, 1–111. [Google Scholar]
- Elsonbaty, A.R.; El-Sayed, A.M.A. Further nonlinear dynamical analysis of simple jerk system with multiple attractors. Nonlinear Dyn. 2017, 87, 1169–1186. [Google Scholar] [CrossRef]
- Tang, D.; Zhang, S.; Ren, J. Dynamics of a general jerky equation. J. Vib. Control 2019, 25, 922–932. [Google Scholar] [CrossRef]
- Sang, B.; Huang, B. Zero-Hopf Bifurcations of 3D Quadratic Jerk System. Mathematics 2020, 8, 1454. [Google Scholar] [CrossRef]
- Braun, F.; Mereu, A.C. Zero-Hopf bifurcation in a 3D jerk system. Nonlinear Anal. Real World Appl. 2021, 59, 103245. [Google Scholar] [CrossRef]
- Lăzureanu, C. Dynamical Properties, Deformations, and Chaos in a Class of Inversion Invariant Jerk Equations. Symmetry 2022, 14, 1318. [Google Scholar] [CrossRef]
- Sun, X.; Yan, S.; Zhang, Y.; Wang, E.; Wang, Q.; Gu, B. Bursting dynamics and the zero-Hopf bifurcation of simple jerk system. Chaos Solit. Fractals 2022, 162, 112455. [Google Scholar] [CrossRef]
- Lăzureanu, C.; Cho, J. On Hopf and fold bifurcations of jerk systems. Mathematics 2023, 11, 4295. [Google Scholar] [CrossRef]
- Lyu, W.; Li, S.; Chen, Z.; Bi, Q. Bursting Dynamics in a Singular Vector Field with Codimension Three Triple Zero Bifurcation. Mathematics 2023, 11, 2486. [Google Scholar] [CrossRef]
- Coullet, P.H.; Tresser, C.; Arneodo, A. Transition to stochasticity for a class of forced oscillators. Phys. Lett. A 1979, 72, 268–270. [Google Scholar] [CrossRef]
- Gottlieb, H.P.W. Question 38. What is the simplest jerk function that gives chaos? Am. J. Phys. 1996, 64, 525. [Google Scholar] [CrossRef]
- Sprott, J.C. Some simple chaotic jerk functions. Am. J. Phys. 1997, 65, 537–543. [Google Scholar] [CrossRef]
- Wei, Z.; Sprott, J.C.; Chen, H. Elementary quadratic chaotic flows with a single non-hyperbolic equilibrium. Phys. Lett. A 2015, 379, 2184–2187. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Moroz, I.M.; Abd El-Latif, A.A.; Abd-El-Atty, B.; Sambas, A. A new multistable jerk system with Hopf bifurcations, its electronic circuit simulation and an application to image encryption. Int. J. Comput. Appl. Technol. 2021, 67, 29–46. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Kammogne, A.S.T.; Tlelo-Cuautle, E.; Talonang, C.N.; Abd-El-Atty, B.; Abd El-Latif, A.A.; Kengne, E.M.; Mawamba, V.F.; Sambas, A.; Darwin, P.; et al. A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application. Electronics 2023, 12, 2818. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).