Abstract
In this paper, we study the fixed-time formation (FixF) control problem for the nonlinear second-order multi-agent systems (MASs) with directed graph, where all agents are subject to communication disturbances. To overcome the bounded disturbance of communication and to guarantee the realization of predesignated formation within a fixed-time, a suitable FixF control protocol based on the backstepping method is proposed. Furthermore, to eliminate the dependence of the control parameters on global information, a new adaptive FixF control protocol is provided to combine with some mild conditions of control gain such that the formation with acceptable bounded error of MASs can be achieved within a fixed-time. Finally, the theoretical results are verified by two simulation examples, one of the simulation examples is that we set the desired formation as a regular octagon and the desired formation motion trajectory as a circle, the results show that all agents can form formation motion within a fixed-time.
MSC:
82C22; 92D50; 92C15
1. Introduction
Formation control is one of the hot topics in the field of MASs due to its broad application in the military, aerospace, industry, entertainment and other fields. Roughly speaking, the subject of formation control is to design a control protocol, which is based on local interactions among agents, such that all agents in MASs move towards a specific target or direction and maintain the predetermined geometric formation over time [1]. Initially, researchers focused on time-invariant formation control; however, many practical tasks in engineering such as maneuvering targets tracking and collision prevention need to be modeled as time-varying formation control problems. Hence, the study of time-varying formation is of great practical significance [2].
Generally, the convergence speed is a critical factor to evaluate the efficiency of the proposed control protocol in the study of the formation control problem. Moreover, from a practical point of view, the finite-time stability is more practical than the asymptotic stability. Consequently, most of the current research focuses on finite-time formation control [3,4,5,6]. Recall some references, e.g., saying in [7], that the authors investigated the finite-time formation control problem of nonlinear first-order MASs under directed graphs. For leader-following formation control of MASs, the authors in [8] studied the framework of finite-time non-smooth formation control for nonlinear first-order MASs under digraphs. The authors in [9] studied the event-triggered finite-time formation control of leader–follower MASs with unknown velocities. In addition, there are also a lot of reported works on the finite-time formation control of second-order MASs. For example, the practical finite-time consensus problem for the second-order heterogeneous switched nonlinear MASs is investigated in [10]. The authors of [11] proposed a finite-time adaptive formation control protocol for heterogeneous second-order perturbed MASs under directed graphs.
Although the finite-time formation control has practical advantages over the asymptotic case in practice, the settling time of finite-time stability is difficult to calculate accurately because it depends heavily on the initial values of systems, which are not known in advance at some points. Therefore, in order to overcome the disadvantage of finite-time stability, the fixed-time stability (FixS) is improved by [12]. The advantage of the fixed-time stability is that the upper bound of the settling time just depends on the parameter of systems and control protocol. Based on this advantage, the fixed-time stability has attracted wide attention from scholars, and it is also widely used in MASs formation control problems. For instance, the fixed-time stability of singular systems has been extensively studied in [13,14]. Furthermore, the authors in [15] investigated FixF control for heterogeneous MASs with partial unknown control directions. The fast fixed-time nonsingular terminal sliding-mode formation control for autonomous underwater vehicles based on a disturbance observer was considered in [16]. The fixed-time distributed formation control for a class of nonlinear MASs subject to internal uncertainties and external disturbances was investigated in [17]. Several control methods have been applied in the existing literature, such as leader–follower approaches [18,19] and event-triggered control [20,21]. In [18], the authors studied distributed fixed-time leader-following formation control for second-order MASs via output feedback and the authors in [19] provide a novel fixed-time control approach for the leader–follower formation control of surface vehicles. Combining the event-triggered control, the event-triggered fixed-time adaptive neural formation control for underactuated autonomous surface vessels with connectivity constraints and prescribed performance was studied in [20], and the authors of [21] provide a novel hierarchical event-triggered scheme for the formation control of networked autonomous surface vehicles with fully discontinuous communication. In [22,23,24,25], the fixed-time formation tracking control problem for second-order MASs is studied in a directed topological network, second-order integral system with bounded uncertainty, nonlinear dynamic disturbance, and input delay. The authors in [26,27,28,29] mainly studied the fixed-time formation tracking control problem of leader–follower MASs. In fact, the study of control for leaderless flocking is more challenging since the predetermined trajectory cannot be known; therefore, it is very difficult for agents to form a stable formation. The references [30,31] summarized the main research achievements and latest progress of distributed cooperative anti-jamming formation control for MASs. Compared with the anti-jamming formation control of a single system, the formation control of MASs is more challenging due to the coupling problem.
However, to the best of our knowledge, the fixed-time stability theory is rarely used in formation control of MASs, which arouse our research interest. Notice that most of the above literature studies the MASs under undirected communication topology, and many of them adopt the leader–follower approaches [9,18,19,26,27,28]. The control protocol is usually designed by using global information, such as [3,6,15,20,24,32]. In addition, most of the above literature does not consider realistic disturbance factors [2,4,8,22]. As a result, there are three aspects that are worth considering: Firstly, how to design an adaptive control protocol that does not rely on global information to ensure the FixF of MASs? Secondly, how to conquer the challenge of the disturbance in communication? Thirdly, how to design a control protocol that enables MASs to accomplish formation control without a leader? This paper will give the positive answers to the above issues. Therefore, compared with the related works, the main contributions of this paper are as follows:
- (i)
- To conquer the difficulty of bounded disturbance, a new FixF control protocol is proposed by combining the backstepping method with the distributed cooperative variable, which has the advantages of a simple and effective structure.
- (ii)
- To overcome the problem that some control parameters depend on the global information, a new simple adaptive FixF control protocol is proposed, which combines with a control gain condition to enable the MASs to achieve a fixed-time formation within bounded error.
- (iii)
- The two control protocols designed in this paper can make MASs achieve the formation control goal without a leader.
2. Preliminaries and Problem Statement
Denote and is the maximal real eigenvalues of a real matrix. For any , sign(s) is the signum function. Define . Let be the N-dimensional Euclidean space. Let be the column vector of all ones. For real x, is the absolute value of x. Define as a positive vector if all For any real , define .
2.1. Graph Theory
In this paper, the communication network of a MASs with N agents can be regarded as a directed graph , where presents the node set and is edge set, is the adjacency matrix of the graph with non-negative elements. An edge rooted at spacecraft j and ending at spacecraft i is denoted by . So, the weight . Furthermore, it is assumed that no self-loop exists (i.e., ) and multiple edges between agents will not be allowed in the current paper. The corresponding Laplacian matrix can be defined as
Lemma 1
([11,33,34]). If is a strongly connected graph and its Laplacian matrix is denoted by L, then , and there exists a vector with , and , such that . Furthermore, define . In addition, let be any positive vector and . Then, the following inequality holds
where . In particular, if , then .
2.2. Fixed-Time Stability Theory
Consider the following system:
where is nonlinear function, which can be discontinuous. Assume the origin is an equilibrium point of (3).
Definition 1
([12]). The origin of (3) is said to be globally finite-time stable if it is globally asymptotically stable and any solution of (3) reaches the equilibria at some finite time moment, i.e., , , where is the settling-time function. Moreover, if the settling-time function is bounded, i.e., , for all . Then, the origin of (3) is said to be FixS.
Lemma 2
([12]). If there exists a continuous radially unbounded function such that and for some positive constants α, β, , satisfying , then, the origin of system (3) is FixS with the settling time estimated by , for all .
Lemma 3
([35]). Consider the system (3). Suppose that there exists a Lyapunov function such that for some positive constants α, β, , satisfying . Then, the system (3) is practical FixS. Moreover, the residual set of the solution of system (3) can be given by , where θ is a scalar and satisfies . The time needed to reach the residual set is bounded as .
2.3. Several Supporting Inequalities
Lemma 4
([36]). For any x, , , it holds
Lemma 5
([37]). Let and . Then
Lemma 6
([37]). Let and . Then
Lemma 7
([38] (Young’s Inequality)). Assuming a and b are non-negative real, , let and , then
with equality if and only if . Moreover, for any , let and , then
with equality if and only if .
2.4. Problem Formulation
Consider the second-order MASs containing N agents with disturbances, whose dynamics can be described as
with the initial data , , where , represent the position and velocity states of ith agent at time t, respectively. is the control input of ith agent. stands for the disturbance.
Definition 2
([39]). For i, , let a time-dependent vector be formation information. Then, for any initial state , the FixS formation for the second-order MASs (8) is said to be achieved if there exists a fixed constant , which is unrelated to the initial state , such that the following conditions are simultaneously satisfied
- (1)
- , , for ;
- (2)
- , , for .
To study the desired results, the following assumptions are employed.
Assumption 1.
For , is bounded, i.e., there is a positive M such that .
Assumption 2.
For , is bounded, i.e., there is a positive such that .
Remark 1.
In fact, Assumptions 1 and 2 are reasonable due to the energies of the disturbance and the acceleration of the agents are all finite in practice.
3. Main Results
Letting , then the error dynamics can be given as:
where . According to Assumptions 1 and 2, satisfies . For convenience, define , and , . Moreover, let ,…,, . Consequently, and .
In what follows, the backstepping method is employed. Firstly, consider the following system
and design a virtual control input for it as follows
where . Denote . Furthermore, motivated by [11], we set
where . It follows from Lemma 1 that satisfies . Then we have
Let . Obviously, is a positive vector. Then, (13) can be rewritten as
Thus, by Lemma 1, it holds that
Secondly, deducing from (9) and (11), we have
Then, the control protocol is designed as follows:
where are defined in (11), and will be determined later. In addition, denote with
Remark 2.
It should be pointed out that the controller designed in (17) is just confined to four parameters, that is , , , β. On one hand, compared with [40], the controller relies on fewer parameters and is more convenient in practical applications. On the other hand, controller (17) is proposed by the backstepping method, which can be extended to adaptive fixed-time consensus controller and deal with communication disturbances.
Theorem 1.
Proof.
Consider the Lyapunov function candidate
with
and
where , , , are given in (11), is defined in Lemma 1.
On one hand, from (10), (11) and (15), the time derivative of can be computed as
where are given in Lemma 1 and (1). On the other hand, based on Lemma 4, we obtain from (18) that
Furthermore, employing (23) and Lemma 7 with yields that
Thus, combining (22), (23) and (24) yields that
It is deduced from (18) that
which, combing with (19), implies that
where . Substituting (16) and (17) into (27), one obtains that
where . Note that , and . Then, , , and , for all . From (28), one obtains that
Let and , then one obtains from (23) that
For any real , let and . Then, it is easy to get from and that , . Thus, by Lemma 5 and Lemma 6, one obtains
It follows from (29) that and are bounded, i.e., there are two positive constants and such that and for all . Then we have
Furthermore,
Simultaneously,
Therefore, from (30)–(34), the following inequality holds
Remark 3.
The control input (17) is globally bounded. From (29) in the paper, one obtains that is bounded, which implies that , , are bounded. Further, we can obtain from (18) that is bounded. Besides, is bounded by noting that . By the expression of control input (17), it is known that the control input is globally bounded.
Remark 4.
It can be observed from Theorem 1 that the parameters can be chosen to be any positive and is a positive. However, the control gain is dependent on global information, viz., the spectrum of the Laplacian matrix . In practical applications, control gains may be ineffective due to some system information missing. Therefore, it is necessary to design a control gain that does not depend on global information. To solve this problem, a new adaptive practical fixed-time control protocol is proposed.
Subsequently, we consider the adaptive FixF control protocol with control gain. We designed the following adaptive FixF control protocol
where , are shown in (11). Moreover, are dynamic control gains satisfying
where , , and are positive.
Theorem 2.
Proof.
Consider the Lyapunov function candidate
where is defined in (19). Defining and utilizing (39), one obtains
Similar to the derivation of (27), combining (16) and (38) with (39) shows that
where is designed in (27). Similarly to (29), from (40)–(42), one has
where and are positive. Notice the fact that . Thus, (43) can be rewritten as
From the definition of and (43), it is easy to obtain that and are bounded, i.e., there exists a constant such that . In addition, employing (44) and Lemmas 5 and 6, one obtains
where
Note that , satisfying and , , s are positive. Then, employing Lemma 3 to (45) shows that the MASs (8) can achieve the practical FixS under control protocol (38) and the solution of system (8) converges to residual set
within a fixed satisfying
The proof is completed. □
4. Simulations
In this section, two examples are presented to demonstrate the theoretical results. Consider MASs (8) with eight agents, i.e., . The position information and velocity information of the agents can be represented as and , . The information of the predetermined formation trajectory is . The relative displacements of each agent to the formation center are set by , , , , , , , . Take the disturbance , . A topology graph is a network structure graph composed of network node devices and communication media. In this paper, each multi-agent is regarded as a network node, and the communication situation between them is described by the topology graph. The specific communication topology graph of the two examples are given below.
Example 1.
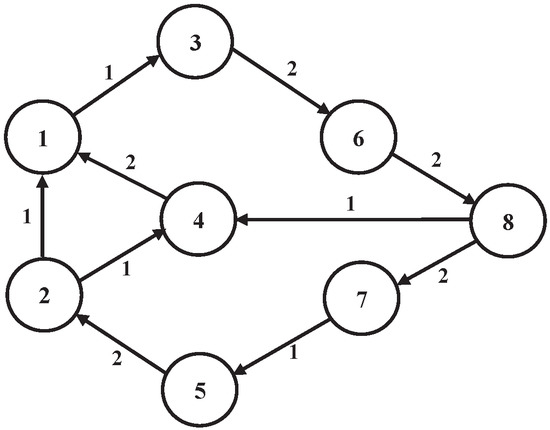
The topology network is represented by a strongly connected directed graph in Figure 1. Control parameters are chosen as , , , , the initial value of dynamic control gain is set to . The desired formation shape is regular octagon and the desired trajectory of the formation center is “O”: . Moreover, the initial data of positions are taken as , , , , , , , , and the initial data of velocities are taken as , , , , , , , .
Figure 1.
The communication digraph of Example 1.
Furthermore, by Matlab, the following Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 are obtained. Figure 2 shows that the desired formation can be achieved within a fixed-time, which demonstrates that Theorem 2 holds. Furthermore, Figure 3 and Figure 4 show that the error between the agents and the predetermined position can achieve convergence in fixed-time. Figure 5 and Figure 6 show that the error between the agents and the predetermined velocity can converge to 0 within a fixed-time. Therefore, the Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6 indicate that the MASs (8) can achieve a relatively static state and form a stable formation within a fixed-time.
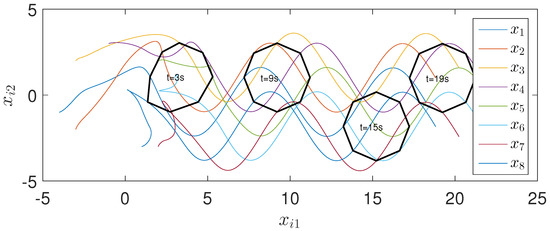
Figure 2.
The trajectory of agents for Example 1.
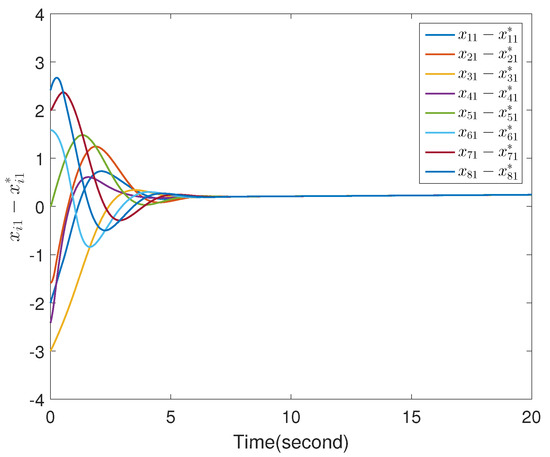
Figure 3.
The position tracking error on horizontal direction.
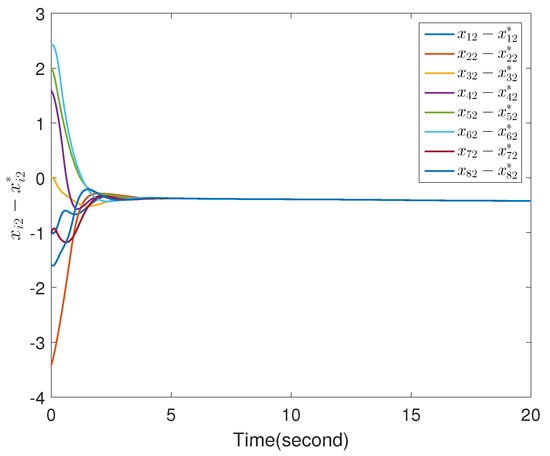
Figure 4.
The position tracking error on vertical direction.
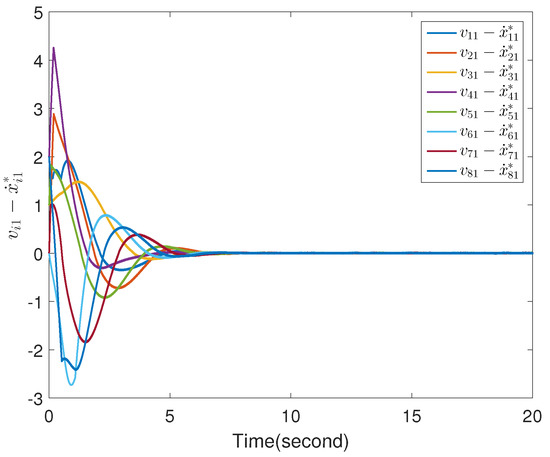
Figure 5.
The velocity tracking error on horizontal direction.
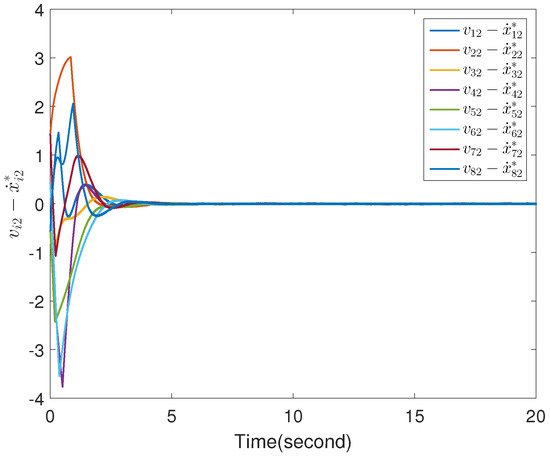
Figure 6.
The velocity tracking error on vertical direction.
Example 2.
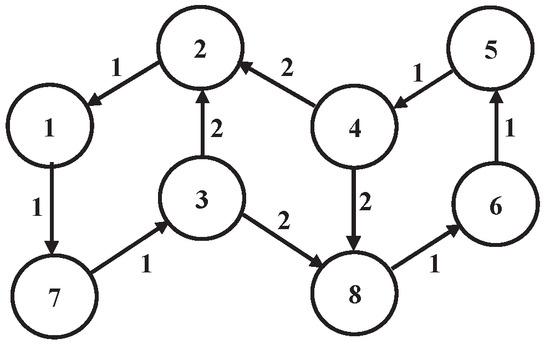
The topology network is represented by a strongly connected directed graph in Figure 7. Control parameters are chosen as , , , , the initial value of dynamic control gain is set as . The desired formation shape is a regular octagon and the desired trajectory of the formation center is “O”: . Moreover, the initial data of positions are taken as , , , , , , , , and the initial data of velocities are taken as , , , , , , , .
Figure 7.
The communication digraph of Example 2.
Similar to Example 1, by Matlab, the following Figure 8, Figure 9, Figure 10, Figure 11 and Figure 12 are obtained. Figure 8 shows that the MASs (8) did not form a stable formation at t = 4 s, while the formation reaches stability at s. Figure 9, Figure 10, Figure 11 and Figure 12 show that the errors of agents with predetermined velocity and predetermined position achieve convergence within a fixed-time, which indicates that the MASs (8) achieve a relatively static state and form a stable formation within a fixed-time.
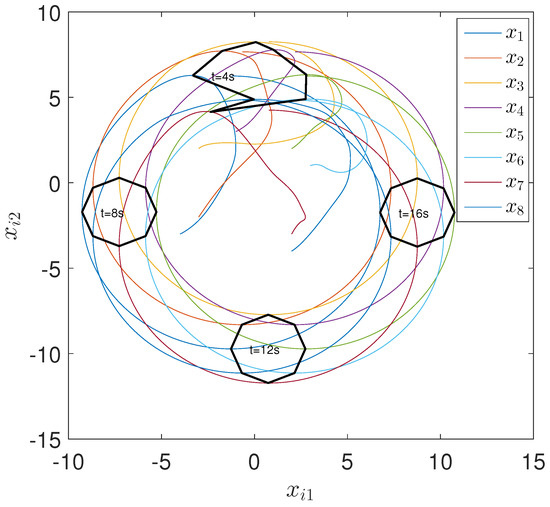
Figure 8.
The trajectory of agents for Example 2.
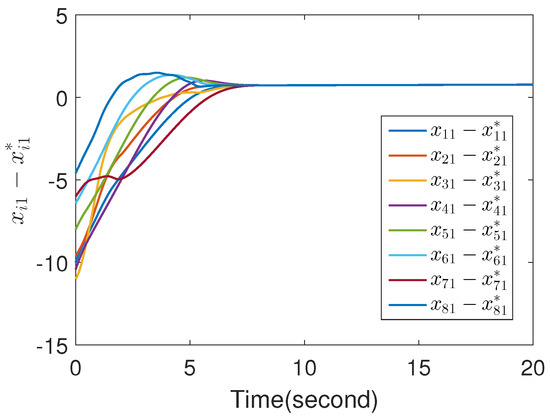
Figure 9.
The position tracking error on horizontal direction.
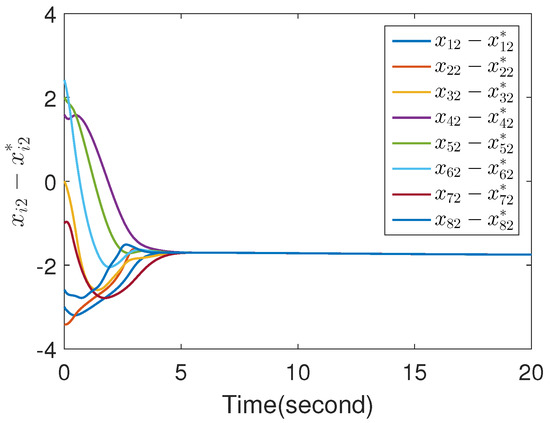
Figure 10.
The position tracking error on vertical direction.
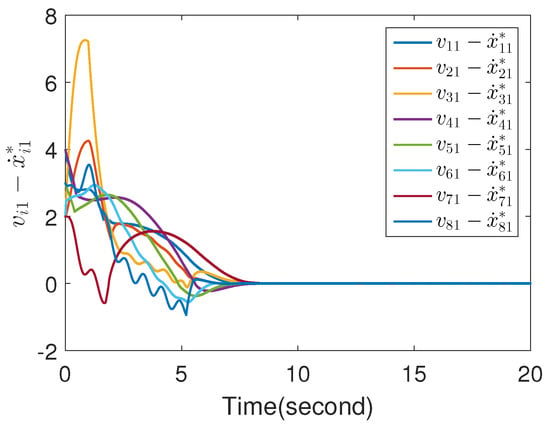
Figure 11.
The velocity tracking error on horizontal direction.
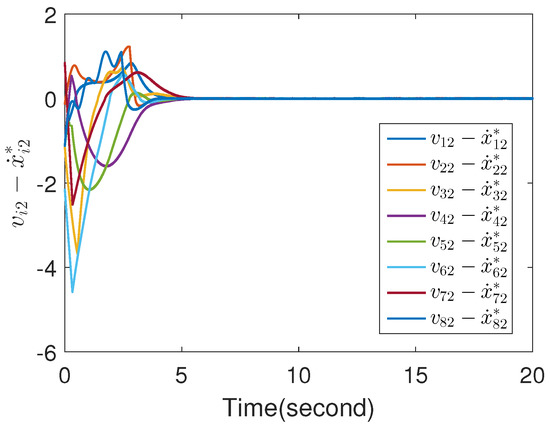
Figure 12.
The velocity tracking error on vertical direction.
5. Conclusions
In this paper, the backstepping method is employed to design a new FixF control protocol for a kind of second-order MASs with disturbances. Compared with some relative existing works, the advantage of the protocol is that it depends on fewer parameters and can greatly reduce the control cost. Then, to remove the dependence of control gains on global conditions, a new adaptive practical FixF control protocol has been presented, which is fully distributed. The control gain of the protocol does not depend on any system information, which is more convenient in practical applications. Then, the desired formation can be achieved within a fixed-time under the control protocol described above. In fact, these results can be extended to more general directed graphs. In this paper, the main limitation of the simulation is that the accuracy is limited when solving the model. Although the shorter the time step, the higher the accuracy, the simulation calculation cost will be greatly increased. In addition, the work in this paper can be extended to MASs formation control under various attacks, such as [41]. In the future, we will try to combine this work with the neural network method [42] to study the formation control of MASs.
Author Contributions
Conceptualization, Z.L. and H.L.; Methodology, Z.L. and H.L.; Software, Z.L.; Validation, Z.L., H.L. and Z.O.; Formal Analysis, Z.L.; Investigation, Z.L.; Resources, H.L. and Z.O.; Data Curation, Z.L.; Writing—Original Draft Preparation, Z.L.; Writing—Review & Editing, H.L.; Visualization, Z.L.; Supervision, Z.O.; Project Administration, H.L.; Funding Acquisition, H.L. and Z.O. All authors read and approved the final manuscript.
Funding
This research was funded by Hunan Provincial Education Department (No. 20A425).
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, X.; Zeng, Z.; Cong, Y. Multi-agent distributed coordination control: Developments and directions via graph viewpoint. Neurocomputing 2016, 199, 204–218. [Google Scholar] [CrossRef]
- Wang, W.; Huang, C.; Lam, H.; Wang, L. Formation control of T-S fuzzy systems with event-triggered sampling scheme via membership function dependent approach. Inf. Sci. 2023, 622, 842–858. [Google Scholar] [CrossRef]
- Xiao, F.; Wang, L.; Chen, J.; Gao, Y. Finite-time formation control for multi-agent systems. Automatica 2009, 45, 2605–2611. [Google Scholar] [CrossRef]
- Du, H.; Zhu, W.; Wen, G.; Wu, D. Finite-time formation control for a group of quadrotor aircraft. Aerosp. Sci. Technol. 2017, 69, 609–616. [Google Scholar] [CrossRef]
- Li, T.; Zhao, R.; Chen, C.L.P.; Fang, L.; Liu, C. Finite-Time Formation Control of Under-Actuated Ships Using Nonlinear Sliding Mode Control. IEEE Trans. Cybern. 2018, 48, 3243–3253. [Google Scholar] [CrossRef]
- Liu, K.; Wu, L.; Lü, J.; Zhu, H. Finite-time adaptive consensus of a class of multi-agent systems. Sci. China Technol. Sci. 2016, 59, 22–32. [Google Scholar] [CrossRef]
- Wang, J.; Bi, C.; Wang, D.; Kuang, Q.; Wang, C. Finite-time distributed event-triggered formation control for quadrotor UAVs with experimentation. ISA Trans. 2022, 126, 585–596. [Google Scholar] [CrossRef]
- Lü, J.; Chen, F.; Chen, G. Nonsmooth leader-following formation control of nonidentical multi-agent systems with directed communication topologies. Automatica 2016, 64, 112–120. [Google Scholar] [CrossRef]
- Zhi, Y.; Zhao, Z.; Qi, M. Event-triggered finite-time consensus control of leader–follower multi-agent systems with unknown velocities. Trans. Inst. Meas. Control 2023, 01423312221140619. [Google Scholar] [CrossRef]
- Zou, W.; Shi, P.; Xiang, Z.; Shi, Y. Finite-Time Consensus of Second-Order Switched Nonlinear Multi-Agent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1757–1762. [Google Scholar] [CrossRef]
- Mei, F.; Wang, H.; Yao, Y.; Fu, J.; Yuan, X.; Yu, W. Robust second-order finite-time formation control of heterogeneous multi-agent systems on directed communication graphs. IET Control Theory Appl. 2020, 14, 816–823. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Liu, H.; Weng, P.; Tian, X.; Mai, Q. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems. Ocean Eng. 2023, 267, 113240. [Google Scholar] [CrossRef]
- Zamani, H.; Khandani, K.; Majd, V.J. Fixed-time sliding-mode distributed consensus and formation control of disturbed fractional-order multi-agent systems. ISA Trans. 2023, 138, 37–48. [Google Scholar] [CrossRef]
- Hou, H.Q.; Liu, Y.J.; Lan, J.; Liu, L. Fixed time formation control for heterogeneous multi-agent systems with partial unknown control directions. Int. J. Adapt. Control Signal Process. 2023, 37, 126–144. [Google Scholar] [CrossRef]
- Qin, H.; Si, J.; Wang, N.; Gao, L. Fast fixed-time nonsingular terminal sliding-mode formation control for autonomous underwater vehicles based on a disturbance observer. Ocean Eng. 2023, 270, 113423. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, Z.; Chen, Z. Prescribed-time distributed formation control for a class of nonlinear multi-agent systems subject to internal uncertainties and external disturbances. Nonlinear Dyn. 2023, 111, 1643–1655. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Liu, H.; Yang, Y. Distributed Prescribed-Time Leader-Following Formation Control for Second-Order Multi-Agent Systems via Output Feedback. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4526–4531. [Google Scholar]
- Wang, N.; Li, H. Leader–follower formation control of surface vehicles: A fixed-time control approach. ISA Trans. 2022, 124, 356–364. [Google Scholar] [CrossRef]
- Liu, H.; Lin, J.; Li, R.; Tian, X.; Mai, Q. Event-triggered fixed-time adaptive neural formation control for underactuated ASVs with connectivity constraints and prescribed performance. Neural Comput. Appl. 2023, 35, 13485–13501. [Google Scholar] [CrossRef]
- Yang, Y.Q.; Ge, M.F.; Liang, C.D.; Xu, K.T.; Wang, L. Predefined-time formation control of NASVs with fully discontinuous communication: A novel hierarchical event-triggered scheme. Ocean Eng. 2023, 268, 113422. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Fu, J.; Wang, J. Fixed-time coordinated tracking for second-order multi-agent systems with bounded input uncertainties. Syst. Control Lett. 2016, 93, 1–12. [Google Scholar] [CrossRef]
- Hong, H.; Yu, W.; Fu, J.; Yu, X. A novel class of distributed fixed-time consensus protocols for second-order nonlinear and disturbed multi-agent systems. IEEE Trans. Netw. Sci. Eng. 2018, 6, 760–772. [Google Scholar] [CrossRef]
- Wang, C.; Wen, G.; Peng, Z.; Zhang, X. Integral sliding-mode fixed-time consensus tracking for second-order non-linear and time delay multi-agent systems. J. Frankl. Inst. 2019, 356, 3692–3710. [Google Scholar] [CrossRef]
- Chang, S.; Wang, Y.; Zuo, Z.; Yang, H. Fixed-time formation control for wheeled mobile robots with prescribed performance. IEEE Trans. Control Syst. Technol. 2021, 30, 844–851. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Fixed-time sliding mode formation control of AUVs based on a disturbance observer. IEEE/CAA J. Autom. Sin. 2020, 7, 539–545. [Google Scholar] [CrossRef]
- Xia, L.; Li, Q.; Song, R.; Zhang, Z. Leader-follower time-varying output formation control of heterogeneous systems under cyber attack with active leader. Inf. Sci. 2022, 585, 24–40. [Google Scholar] [CrossRef]
- Defoort, M.; Polyakov, A.; Demesure, G.; Djemai, M.; Veluvolu, K. Leader-follower fixed-time consensus for multi-agent systems with unknown non-linear inherent dynamics. IET Control Theory Appl. 2015, 9, 2165–2170. [Google Scholar] [CrossRef]
- Chen, Y.; Niu, Y.; Chen, C.; Zhou, Q.; Xiang, P. A Distributed Anti-Jamming Algorithm Based on Actor–Critic Countering Intelligent Malicious Jamming for WSN. Sensors 2022, 22, 8159. [Google Scholar] [CrossRef]
- Feng, Z.; Huang, M.; Wu, Y.; Wu, D.; Cao, J.; Korovin, I.; Gorbachev, S.; Gorbacheva, N. Approximating Nash equilibrium for anti-UAV jamming Markov game using a novel event-triggered multi-agent reinforcement learning. Neural Netw. 2023, 161, 330–342. [Google Scholar] [CrossRef]
- Liu, W.; Gu, W.; Sheng, W.; Meng, X.; Wu, Z.; Chen, W. Decentralized multi-agent system-based cooperative frequency control for autonomous microgrids with communication constraints. IEEE Trans. Sustain. Energy 2014, 5, 446–456. [Google Scholar] [CrossRef]
- Mei, J.; Ren, W.; Chen, J. Distributed consensus of second-order multi-agent systems with heterogeneous unknown inertias and control gains under a directed graph. IEEE Trans. Autom. Control 2015, 61, 2019–2034. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M.; Kurths, J. Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 40, 881–891. [Google Scholar]
- Jiang, B.; Hu, Q.; Friswell, M.I. Fixed-time attitude control for rigid spacecraft with actuator saturation and faults. IEEE Trans. Control Syst. Technol. 2016, 24, 1892–1898. [Google Scholar] [CrossRef]
- Wang, H.; Yu, W.; Ren, W.; Lü, J. Distributed adaptive finite-time consensus for second-order multiagent systems with mismatched disturbances under directed networks. IEEE Trans. Cybern. 2019, 51, 1347–1358. [Google Scholar] [CrossRef]
- Zuo, Z.; Tie, L. Distributed robust finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Syst. Sci. 2016, 47, 1366–1375. [Google Scholar] [CrossRef]
- Dragomir, S.S. A note on Young’s inequality. Rev. Real Acad. Cienc. Exactas Físicas Nat. Ser. A Mat. 2017, 111, 349–354. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, K.; Jiang, B.; Ding, S.X. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2121–2133. [Google Scholar] [CrossRef]
- Hong, H.; Wang, H. Fixed-time formation control for second-order disturbed multi-agent systems under directed graph. Symmetry 2021, 13, 2295. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, Y.; Li, T. Attacks on formation control for multiagent systems. IEEE Trans. Cybern. 2021, 52, 12805–12817. [Google Scholar] [CrossRef]
- Han, Z.; Wang, Y.; Sun, Q. Straight-Path Following and Formation Control of USVs Using Distributed Deep Reinforcement Learning and Adaptive Neural Network. IEEE/CAA J. Autom. Sin. 2023, 10, 572–574. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).