Abstract
In this study, firstly, through an alternative theorem, we study the existence and uniqueness of solution of some nonlinear PDEs and then investigate the Ulam–Hyers–Rassias stability of solution. Secondly, we apply a relatively novel analytical technique, the multiple exp function method, to obtain the multiple wave solutions of presented nonlinear equations. Finally, we propose the numerical results on tables and discuss the advantages and disadvantages of the method.
MSC:
83C15; 35A20; 35C05; 35C07; 35C08
1. Introduction
In the Fall term of the year 1940, Ulam gave an expansive talk about a number of significant unsolvable problems. Among those was the following issue concerning the stability of homomorphisms:
⟨Suppose is a group and suppose is a metric group with the metric Given is there a s.t. if a mapping satisfies for each then there is a homomorphism with for all ?⟩
Hyers (1941) has exceptionally answered this question of Ulam for the case that are Banach spaces:
⟨Let , be a mapping between Banach spaces s.t. for all and some Then the limit exists for each and , is the single mapping s.t. for each
Taking this well-known consequence into consideration, the equation is said to have the UH stability on in which T and G are given spaces, if for each mapping satisfying the inequality , for some and each there is a mapping s.t. is bounded on
Rassias (1978) tried to reduce the condition for the bound of the norm of and showed a excellently generalized result of Hyers. In fact, he investigated the following issue:
⟨Suppose is a mapping among Banach spaces. If B satisfies , foe each and some and then there is a unique mapping s.t. for any
The above result was a significant generalization of that of Hyers and stimulated many mathematicians to study the stability issues of several equations. By considering an extensive effect of Rassias on the study of stability problems of diverse equations, the UH stability of such type is called the UHR stability. During the last twenty years, a lot of results for the UHR stability of diverse equations have been solved by many authors.
Through the Cadariu–Radu approach dependent on the Diaz–Margolis theorem, we can prove the uniqueness and existence of solution of nonlinear PDEs and then investigate the stability of it. Finally, by means of an analytical method, we can achieve the exact solution mentioned.
Recently, various analytical approaches have been applied to solve nonlinear differential equations, such as: the sine–cosine technique, the first integral technique and functional variable technique [1], the variational iteration technique [2], the tanh–sech technique [3], the Trial equation technique and the modified Trial technique [4], the Jacobi elliptic function technique [5], the bifurcation technique, the homogenous balance technique [6], the direct algebraic method and the Sine–Gordon expansion technique [7], the homotopy perturbation technique [8], the Hirotas bilinear techniques, the F-expansion technique [9], the extended tanh technique [10] and others.
The above approaches are only concerned about traveling wave solutions of NPDEs. It is obvious that there exist multiple wave solutions to NPDEs, for example, multi-soliton solutions to diverse important models such as the Toda lattice equation, Kdv equation and the Hirota bilinear equations. Thus, there should be an analogous analytical approach for earning multiple wave solutions to NPDEs.
In the present study, we propose an answer by formulating a solution algorithm for calculating the multiple wave solutions to NPDEs.
Consider the following (3+1)-dimensional nonlinear PDE [11]
and the following (2+1)-dimensional nonlinear PDE [11]
for the following special cases:
and
In this study, firstly by means of an fixed point approaches, we investigate the uniqueness, existence and UHR stability of (1) and (3) in Banach spaces. Then, we apply MEFM to construct the new exact solutions for (1), (3) and (4).
The paper is organized as follows: In Section 2, firstly, we propose the fixed point theorem, secondly, through a fixed point theorem, we investigate the UHRS for (1) and (3) in Banach spaces. In Section 3, first we propose the basic idea of MEFM. Then as an application we apply the mentioned method to construct the new exact solutions for (1), (3) and (4). In Section 4, we discuss the proposed approach. Finally, in Section 5, we present the conclusion.
2. Applying Cadariu–Radu Method
Here, using a fixed point theorem, we investigate the UHR stability for (1) and (3) in Banach spaces.
First we state the alternative fixed point method from the literature [12].
Theorem 1.
Consider the complete -valued metric ϵ on χ and Θ on χ with
, in which is a Lipschitz constant. Suppose . If we can find a s.t. , for any , then we have
- the fixed point of Θ is the convergence point of the sequence ;
- in the set , is the single fixed point of Θ;
- for every .
2.1. Stability Result for (1)
Consider (1). Assume a variation given by
where and A are constants. We now rewrite Equation (1) in the following NODE
Integrating Equation (6) twice leads to
where ∁ is a constant. We rewrite (7), as follows:
in which and
Theorem 2.
Assume satisfies the following integral inequality:
and also, assume
where is a continuous function. Suppose Then can find a such that
and
Proof.
Let , and define a mapping given by
It is straight forward to prove that is a complete generalized metric space.
Now, define as
We prove that the self-mapping is contractive on Assume and Now for any we have
Therefore we obtain
and we have the contractive property of , because
On the other hand, according to (9), we have
Thus, the assumptions of Theorem 1 are satisfied, and we have
where is a unique map in
□
2.2. Stability Result for (1)
In this subsection, using a fixed point theorem, we investigate the UHRS for (3), in Banach spaces.
Consider (3). Assume a complete variation given by
where and are constants. We now rewrite Equation (3) in the following NODE
Integrating Equation (17) twice leads:
where ∁ is a constant. We rewrite (18), as follows:
in which and
Theorem 3.
Assume satisfies the following integral inequality:
and also, assume
where is a continuous function. Let Then there exists a unique function which satisfies
and
Proof.
Let and define a mapping given by
It is straight forward to prove that is a complete generalized metric space [12].
Now, define as
We now show that is contractive on Assume and Therefore for any we have
Therefore we obtain
which concludes the contractive property of , because
On the other hand, according to (20), we obtain
Thus the assumptions of Theorem 1 are satisfied, and we have
where is a unique map in
□
3. Applying MEFM
In this section, first we propose the basic idea of MEFM [13]. Then, as an application, we apply the mentioned method to construct the new exact solutions for some nonlinear PDEs.
3.1. The Algorithm of MEFM
Here, we formulate the multi-exp-function method by considering
• Step 1: Let
where and are arbitrary constants, angular wave numbers and wave frequencies, respectively. Note that
• Step 2: Now, let
where and are constants to be determined from Equation (27).
Here, we obtain
• Step 3: By solving a system of algebraic equations on variables and , the multiple wave solutions u reads
3.2. Application
We apply MEFM to construct the analytical solutions for (3+1)-dimensional nonlinear PDE (1) and spacial cases of (2+1)-dimensional nonlinear PDE (2).
3.2.1. Example 1
Here, we apply MEFM to construct the analytical solutions for (3+1)-dimensional nonlinear PDE presented in (1).
• One wave solutions for (1):
First introduce a variable as follows
where and are constants. Note has the following linear partial differential relations
Then, we consider a pair of polynomials of degree one
where and are constants to be determined from (1). Therefore, we have
Thus, the one wave solutions can be proposed by
and
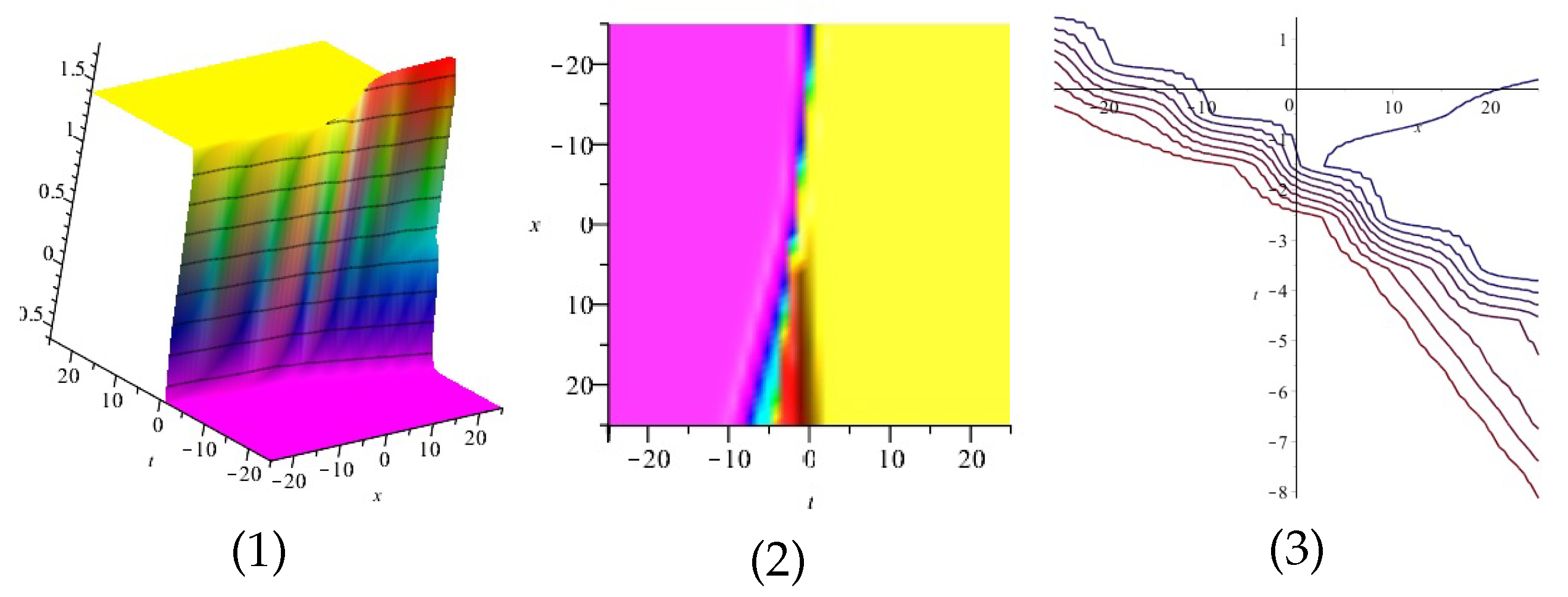
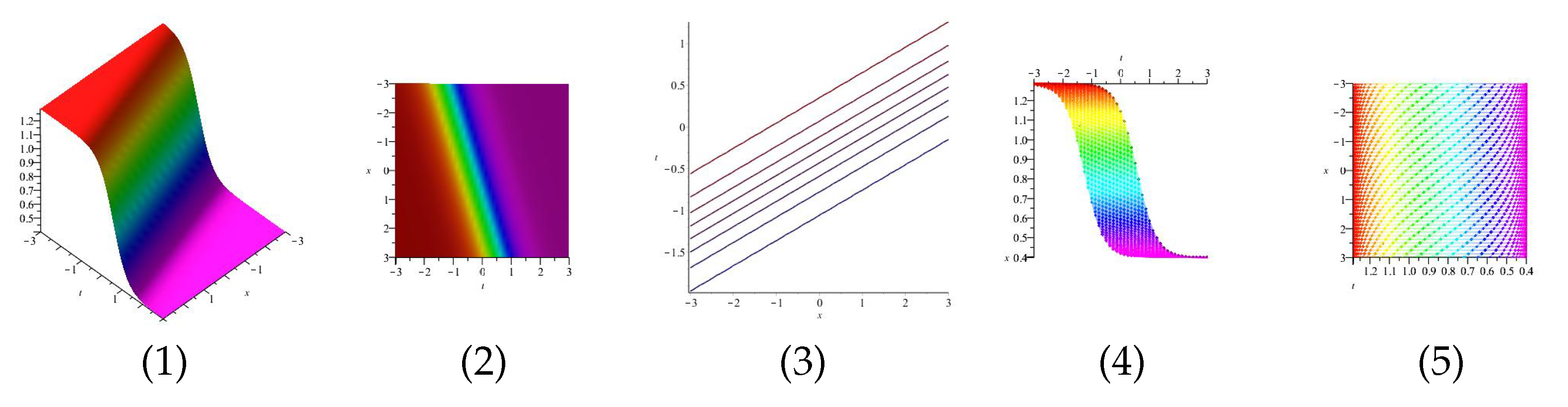
Equation (39) is displayed in Figure 1 for , (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploits the axis orientation. (3), (6) and (9) are contour plots. Further, Equation (40) is displayed in Figure 2 for (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploits the axis orientation. (3), (6) and (9) are contour plots.
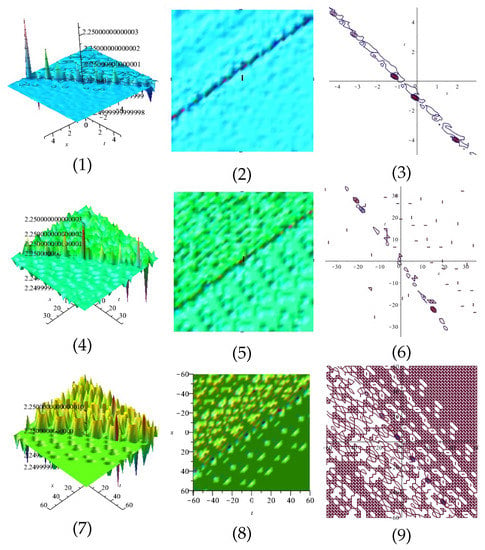
Figure 1.
The 3D and 2D with the diagram of Equation (39), in three different domains.
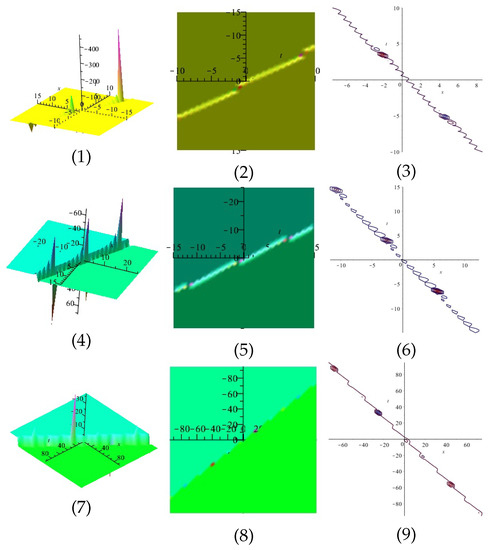
Figure 2.
The 3D and 2D with the diagram of Equation (40), in three different domains.
• Two wave solutions for (1):
Here, introduce a variable as follows
where and are constants. Note has the following linear partial differential relations
Then, we consider a pair of polynomials of degree two
where is a constant to be determined from (1). Therefore, we have
Now, by substituting (45) into (1) and solving the system of algebraic equations, we obtain:
and
By setting the above values in (45), the two wave solutions can be proposed by
and
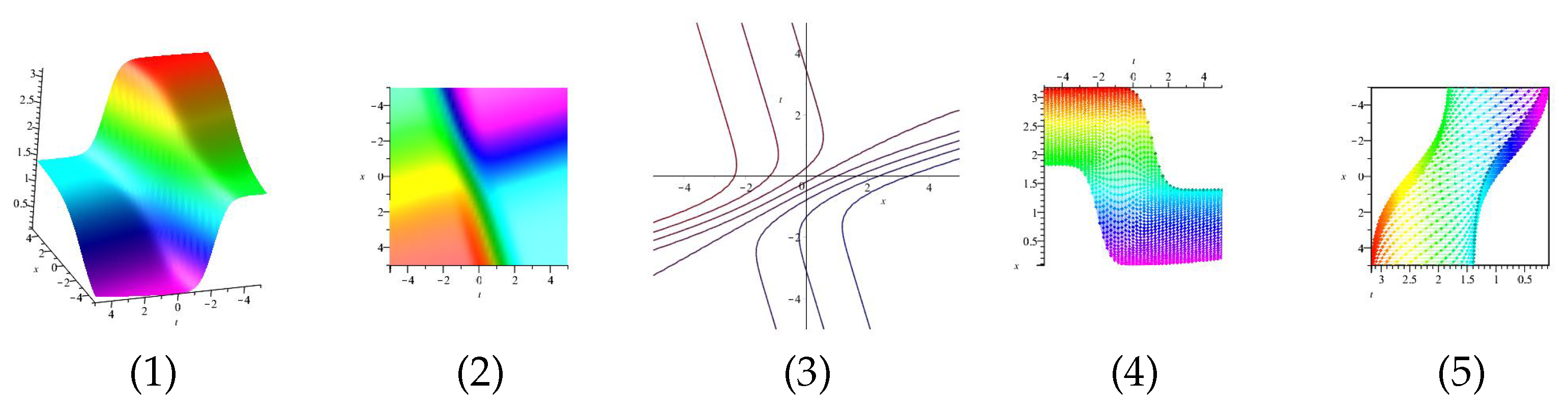
Equation (46) is displayed in Figure 3 for (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploits the axis orientation. (3), (6) and (9) are contour plots. Further, Equation (47) is displayed in Figure 4 for (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploits the axis orientation. (3), (6) and (9) are contour plots.
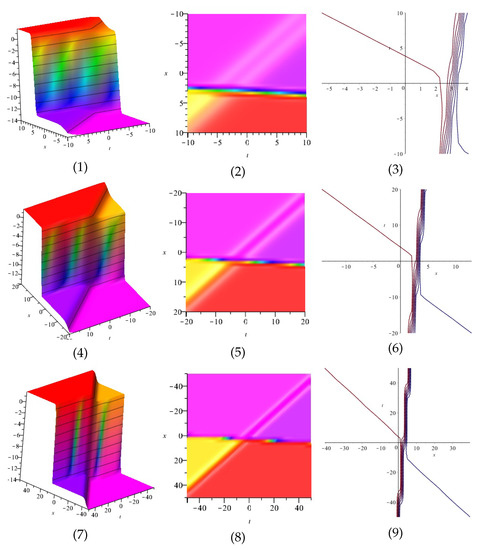
Figure 3.
The 3D and 2D with the diagram of , in three different domains.
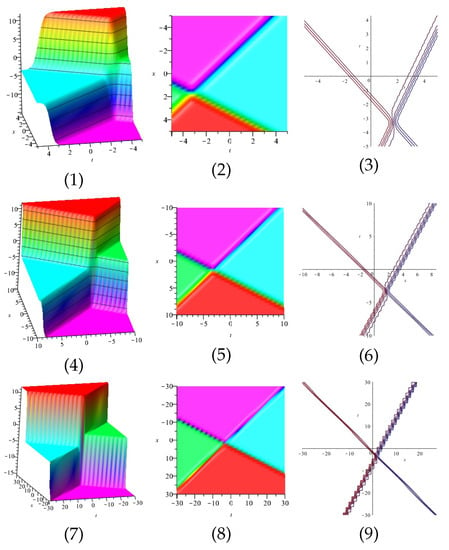
Figure 4.
The 3D and 2D with the diagram of equation in three different domains.
• Three wave solutions for (1):
Here, introduce a variable as follows
where and are constants. Note has the following linear partial differential relations
Then, we consider a pair of polynomials of degree three
and
where and are constants to be determined from (1). Therefore, we have
Now, by substituting (50) into (1) and solving the system of algebraic equations, we obtain:
Thus, the three wave solutions can be proposed by
and also, by inserting (51), (52), and (53) in (50), we obtain and respectively.
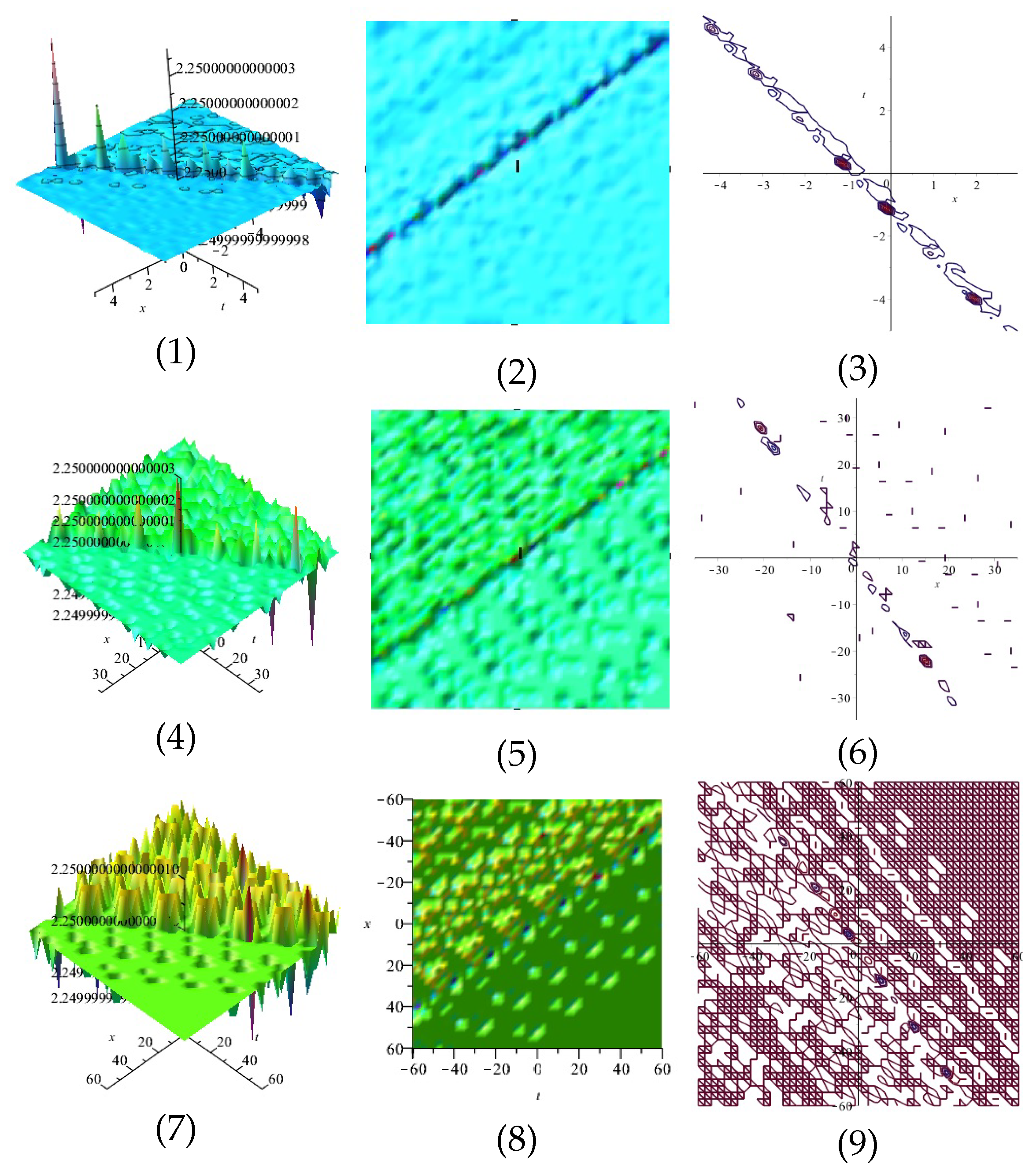
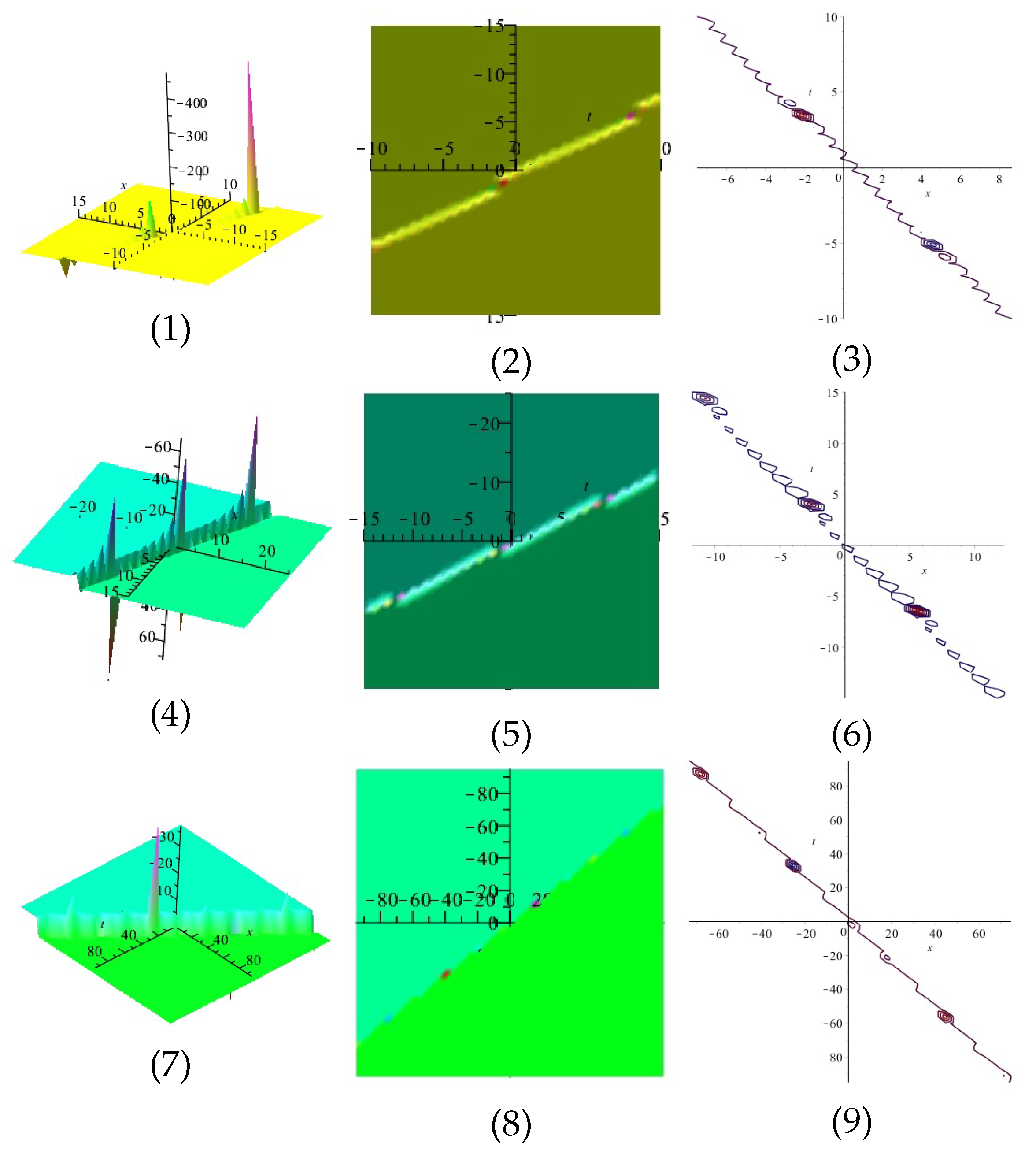
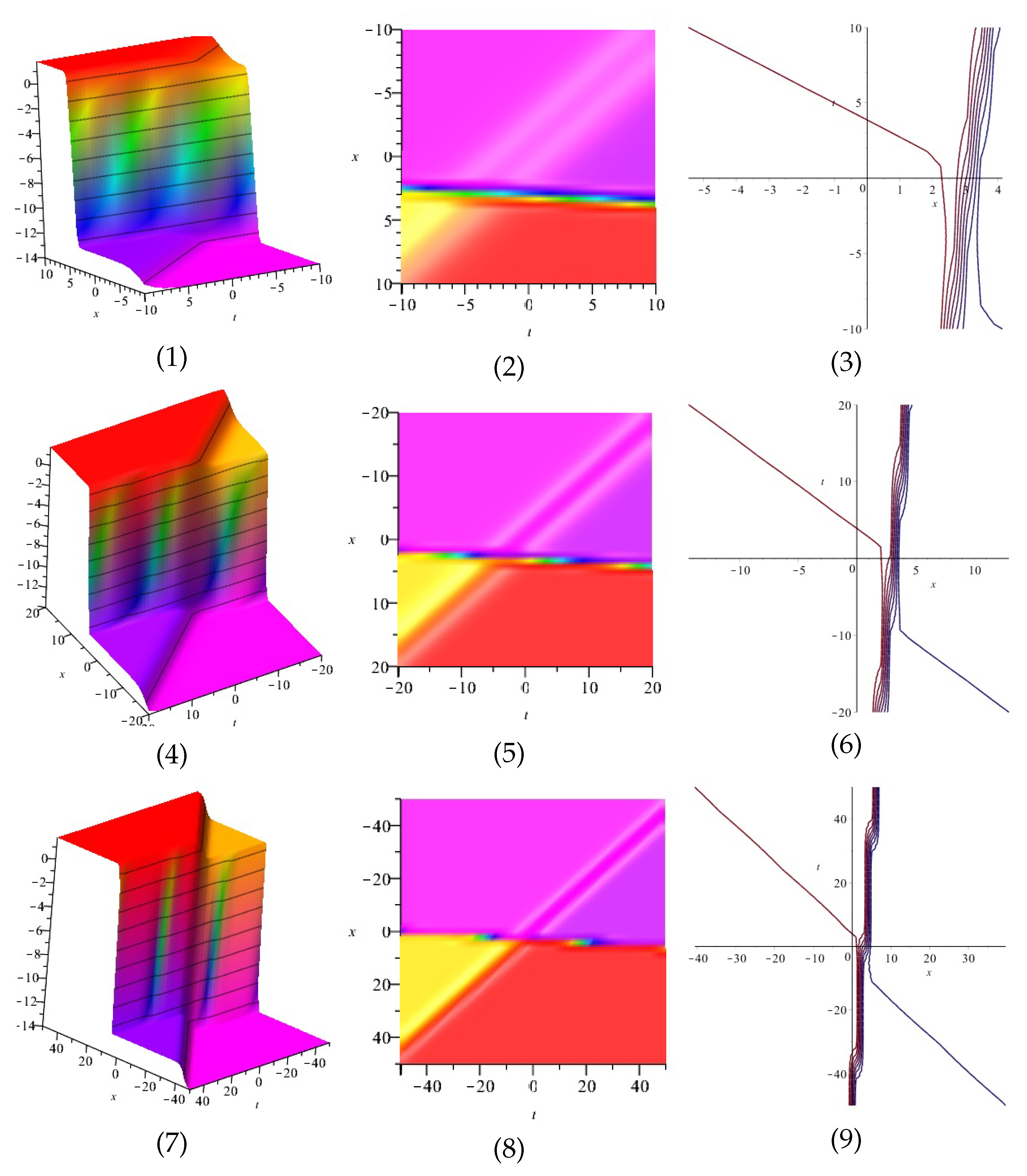
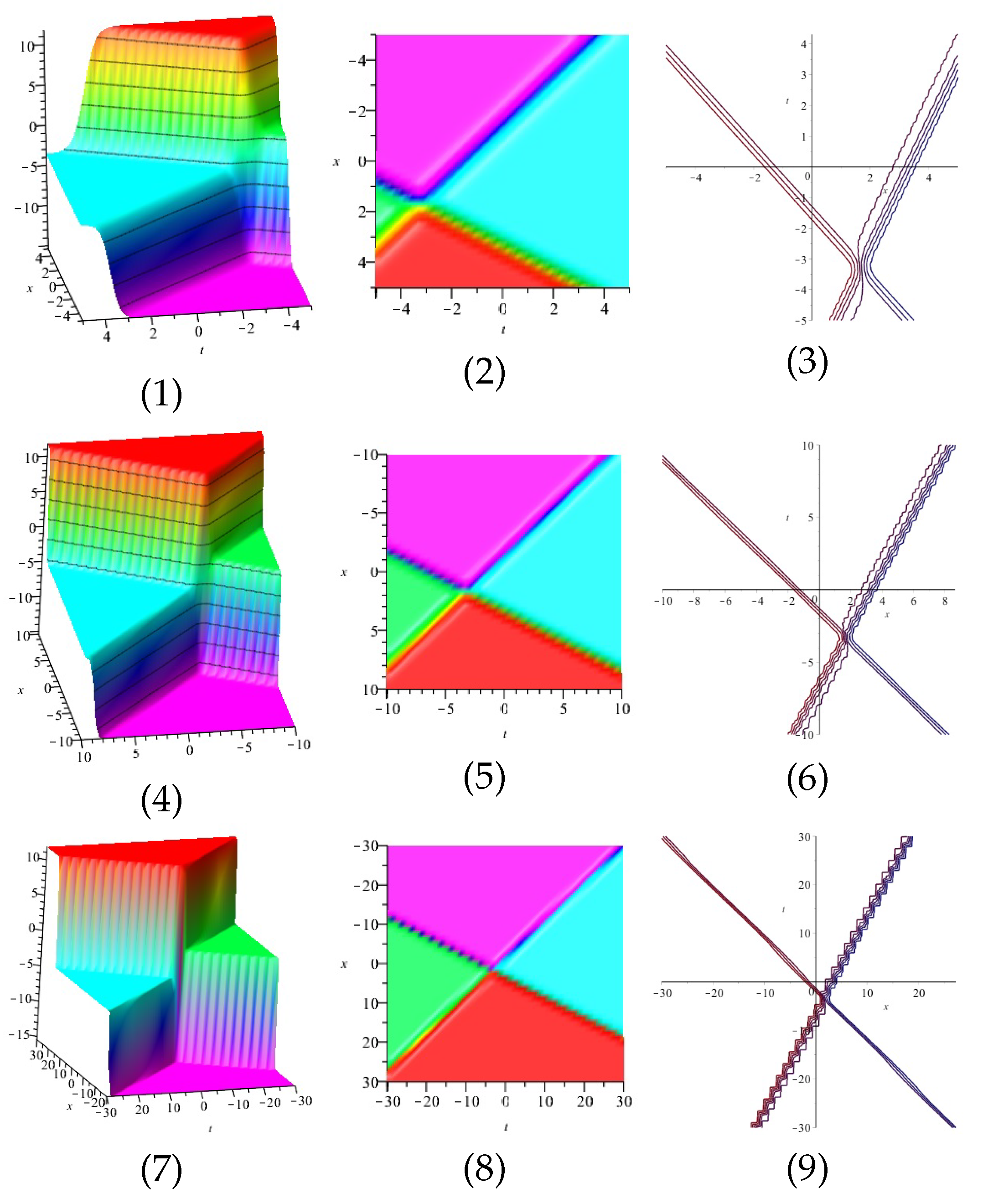
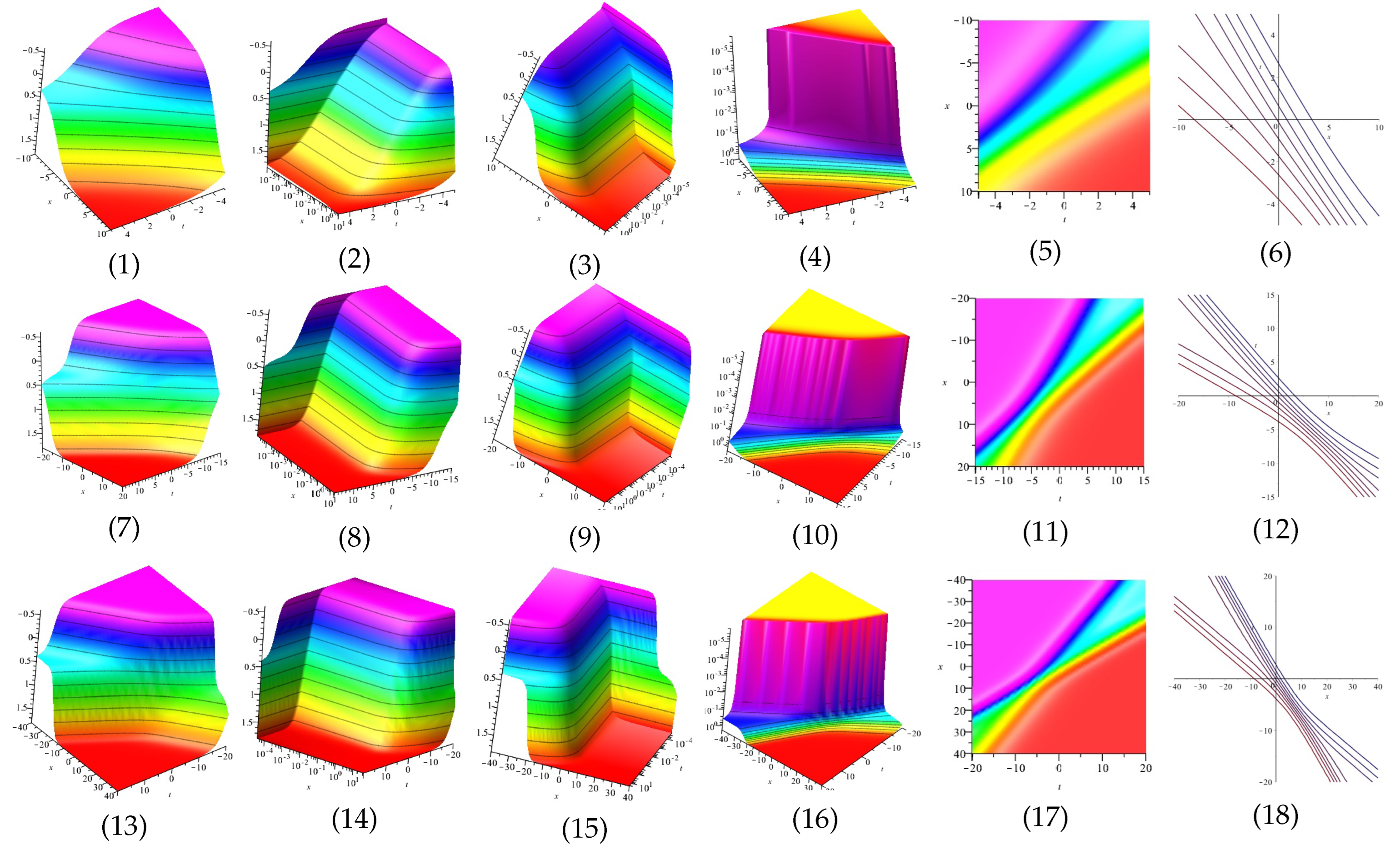
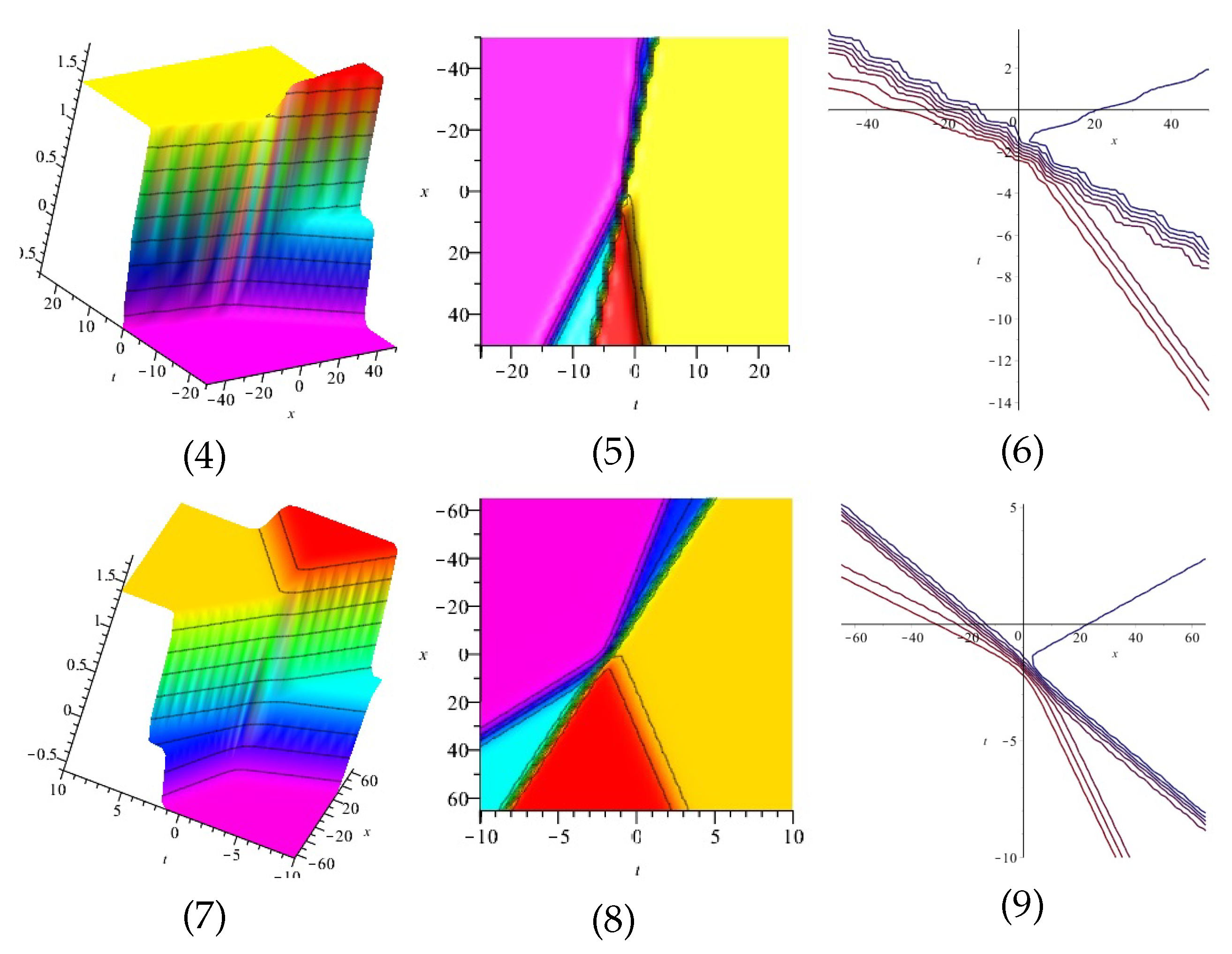
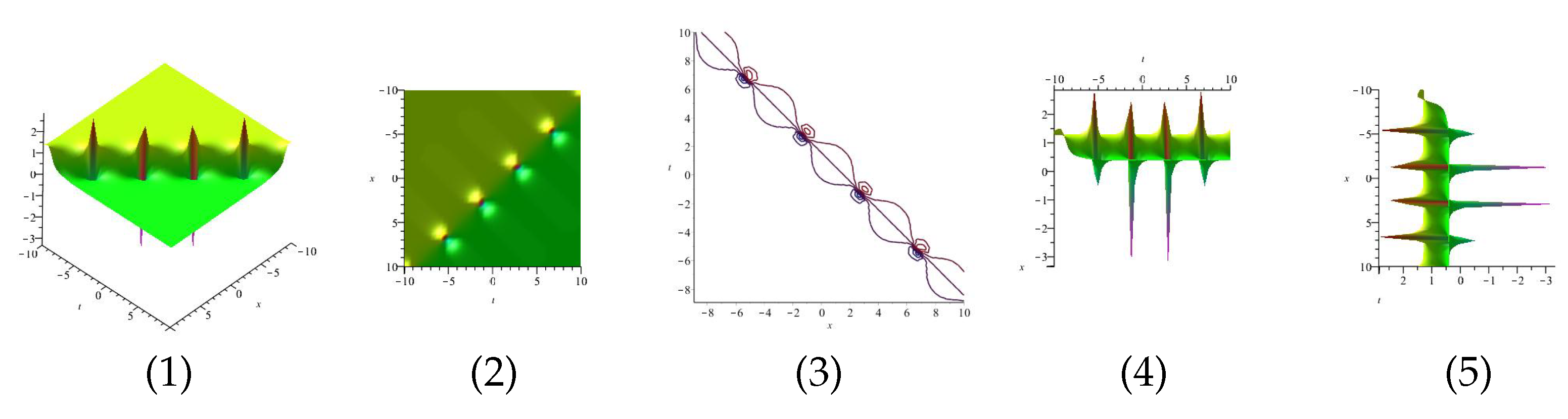
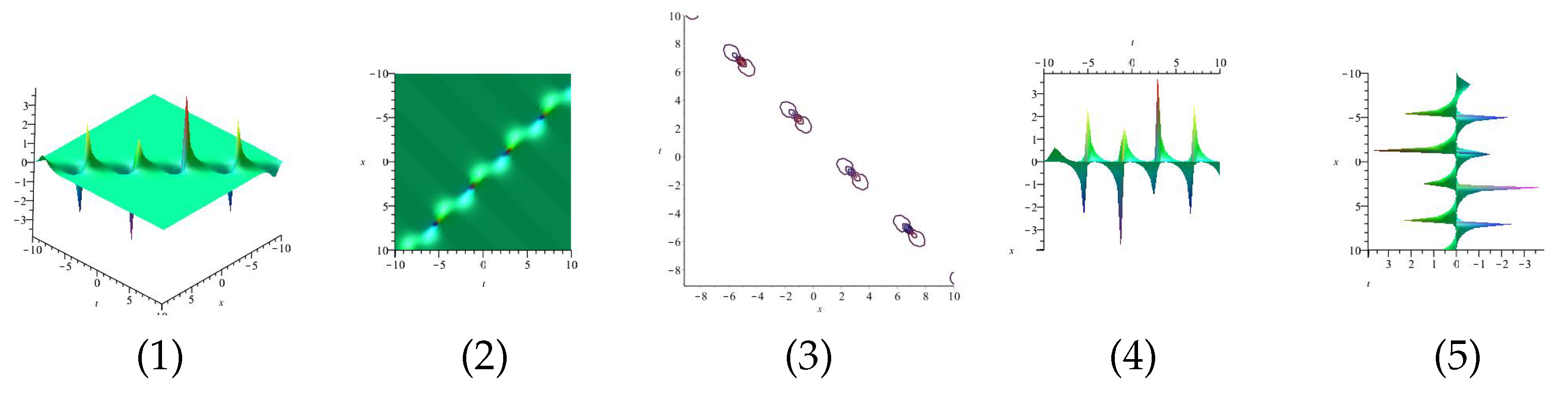
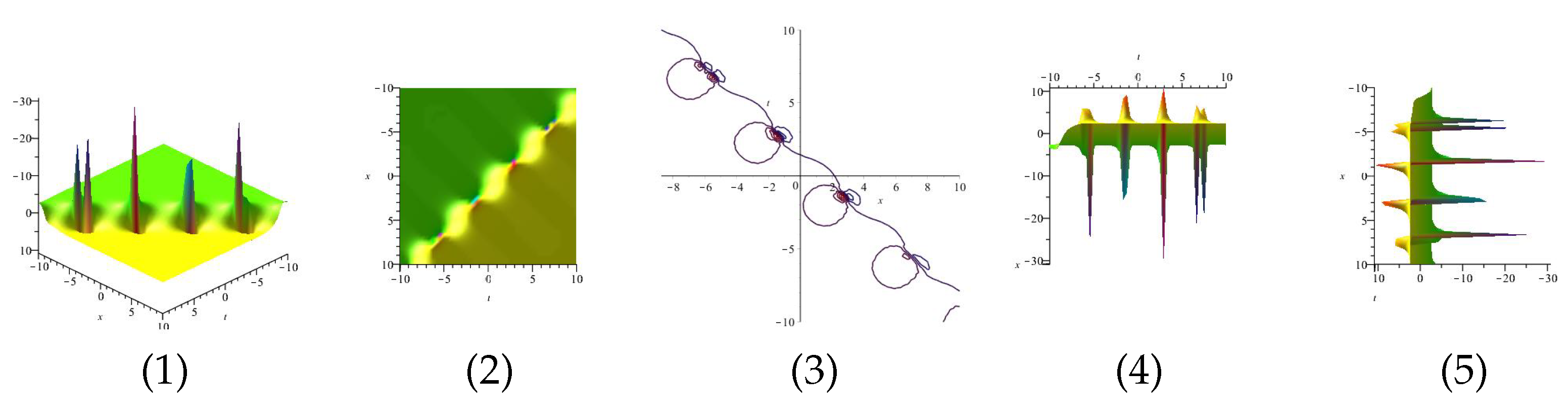
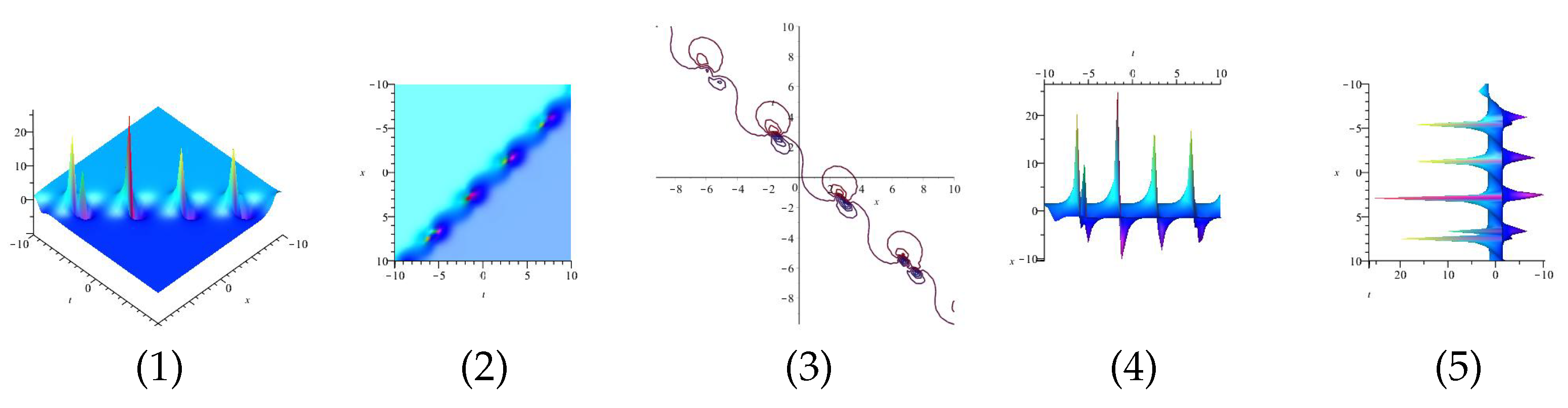
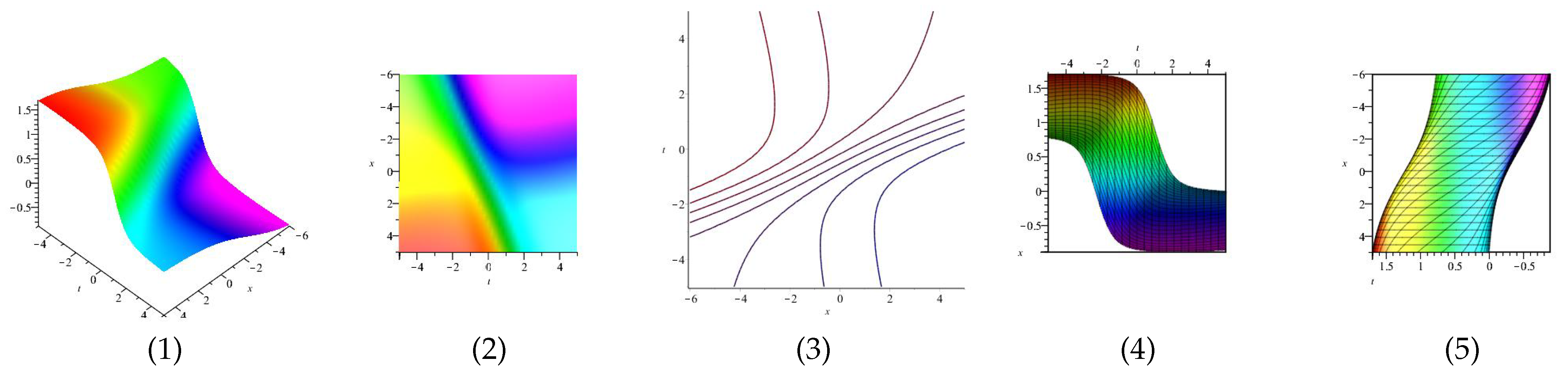
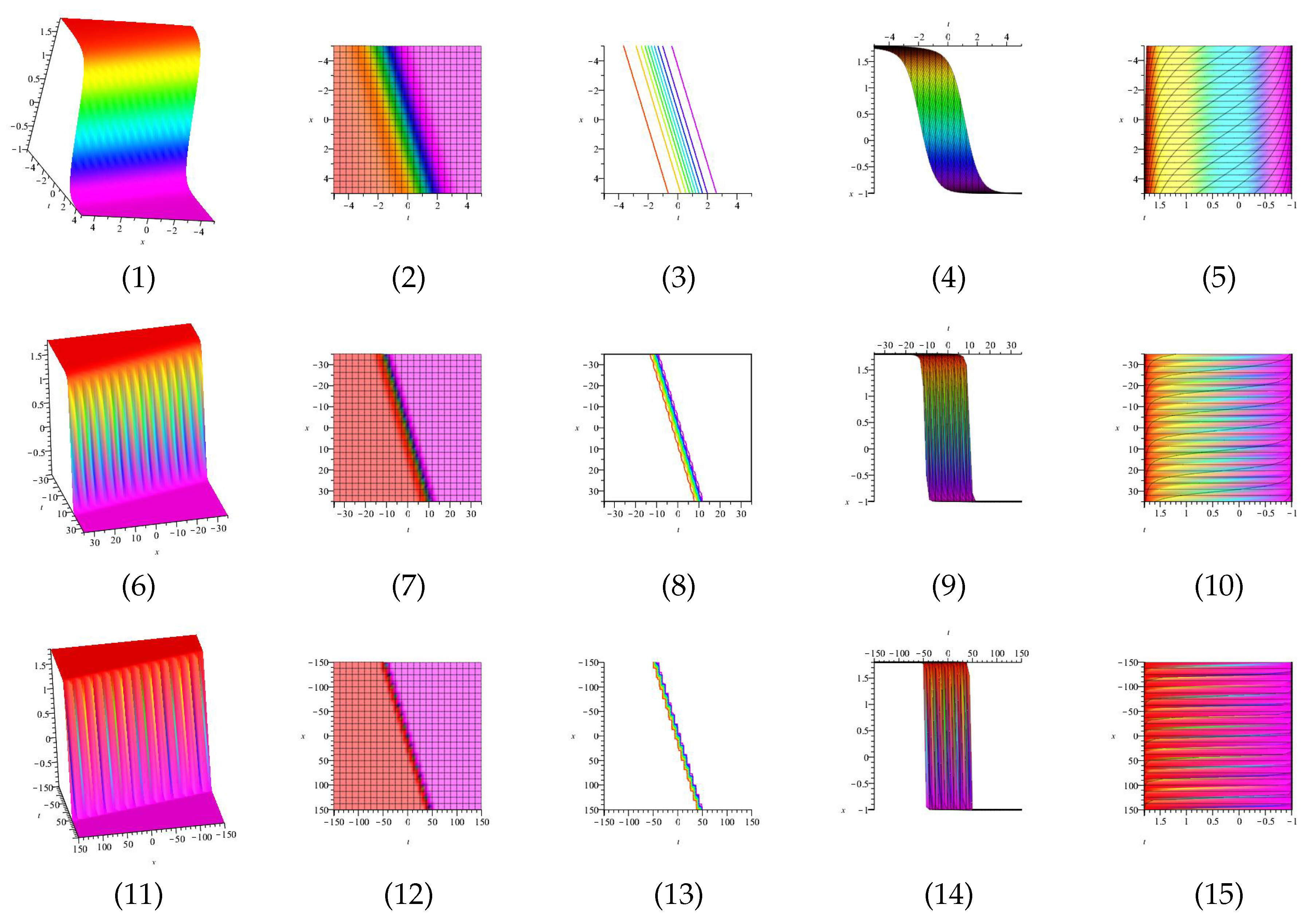
Equation (54) is displayed in Figure 5 for and equation is displayed in Figure 6 for in different domains. Equation is displayed in Figure 7 for (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploit the axis orientation. (3), (6) and (9) are contour plots. Further, equation is displayed in Figure 8 for (1), (4) and (7) are three dimensional with Now (2), (5) and (8) exploit the axis orientation. (3), (6) and (9) are contour plots.
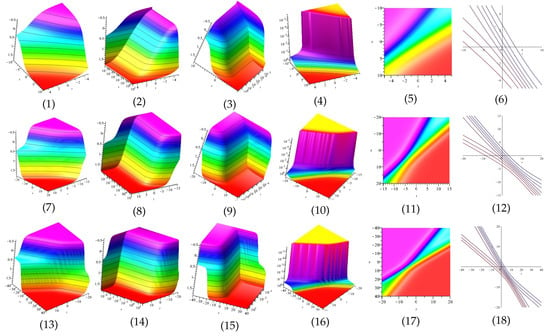
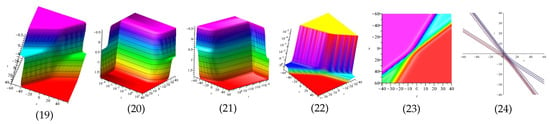
Figure 5.
The 3D and 2D with the diagram of , in four different domains, for and display the axis orientation, display the axis orientation, display the axis orientation, and are contour plots.
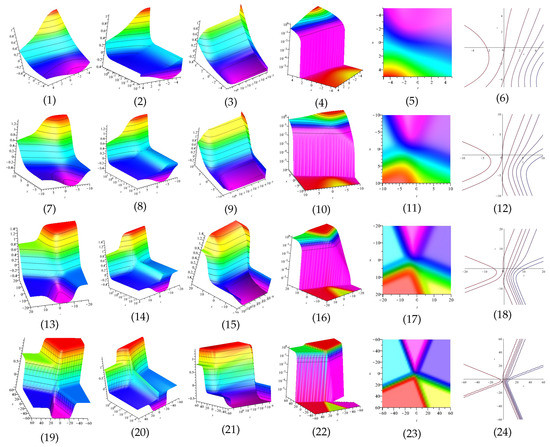
Figure 6.
The 3D and 2D with the diagram of , in four different domains, in four different domains, for and diasplay the axis orientation, display the axis orientation, display the axis orientation, and are contour plots.
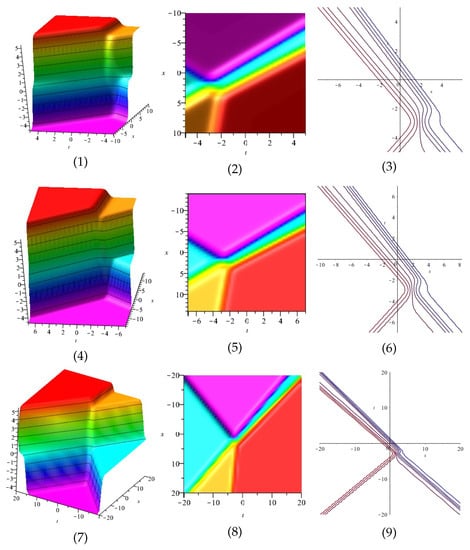
Figure 7.
The 3D and 2D with the diagram of , in three different domains, for and and display the axis orientation and and are contour plots.
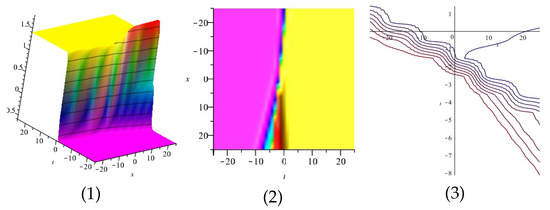
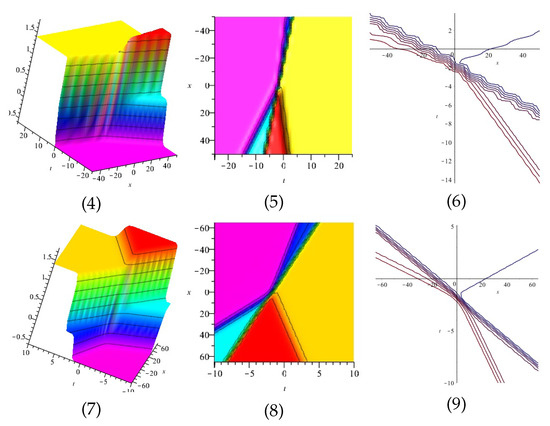
Figure 8.
The 3D and 2D with the diagram of , in three different domains, for and and display the axis orientation and and are contour plots.
3.2.2. Example 2
Here, we apply MEFM to construct the new exact solutions for the (2+1)-dimensional Equation (3).
• One wave solutions for (3):
Firstly, introduce a variable as follows
where and are constants. Obviously, has the following linear partial differential relations
Therefore, we consider a pair of polynomials of degree one
where and are constants to be determined from (1). Therefore, we have
Thus, the one wave solutions can be proposed by
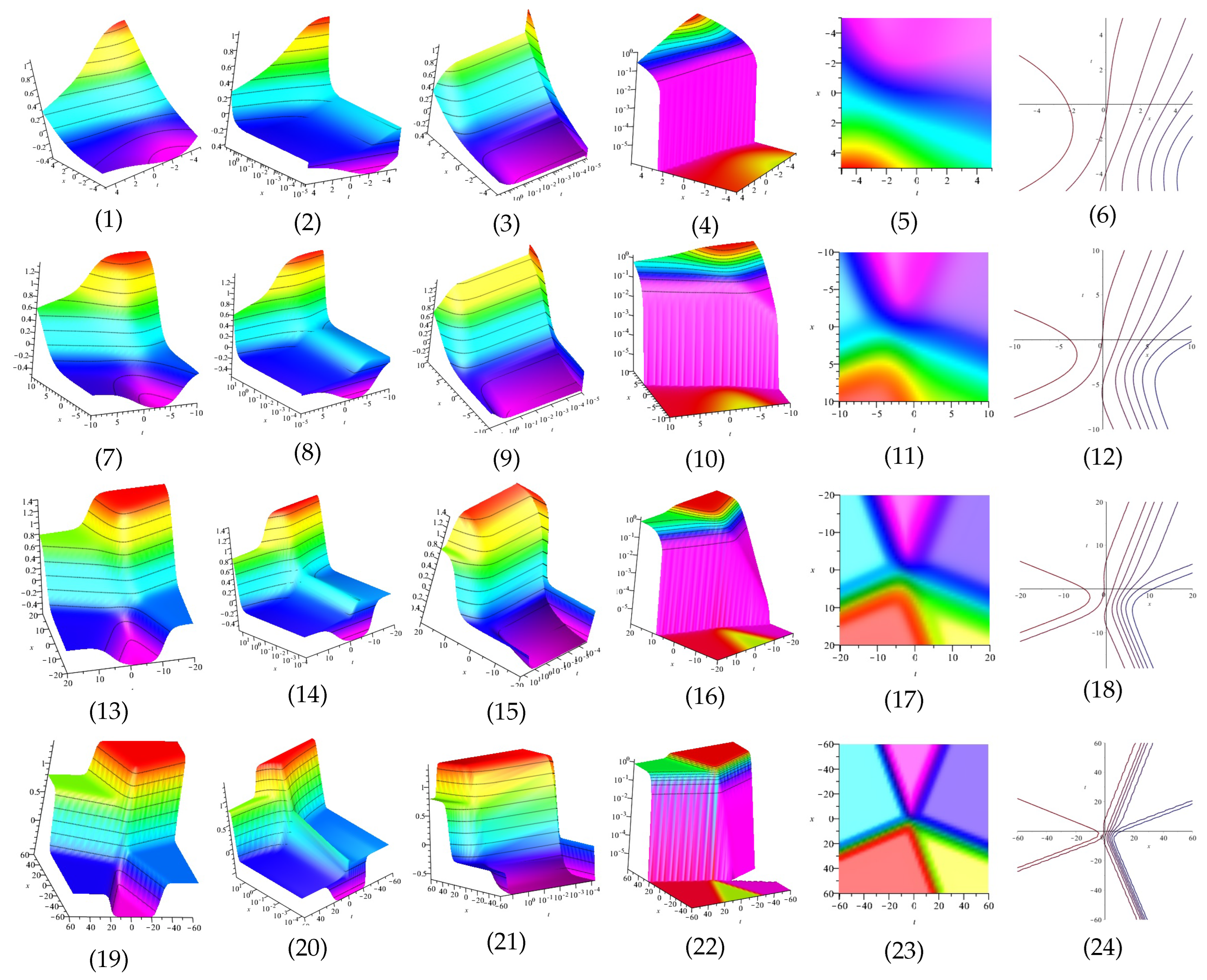
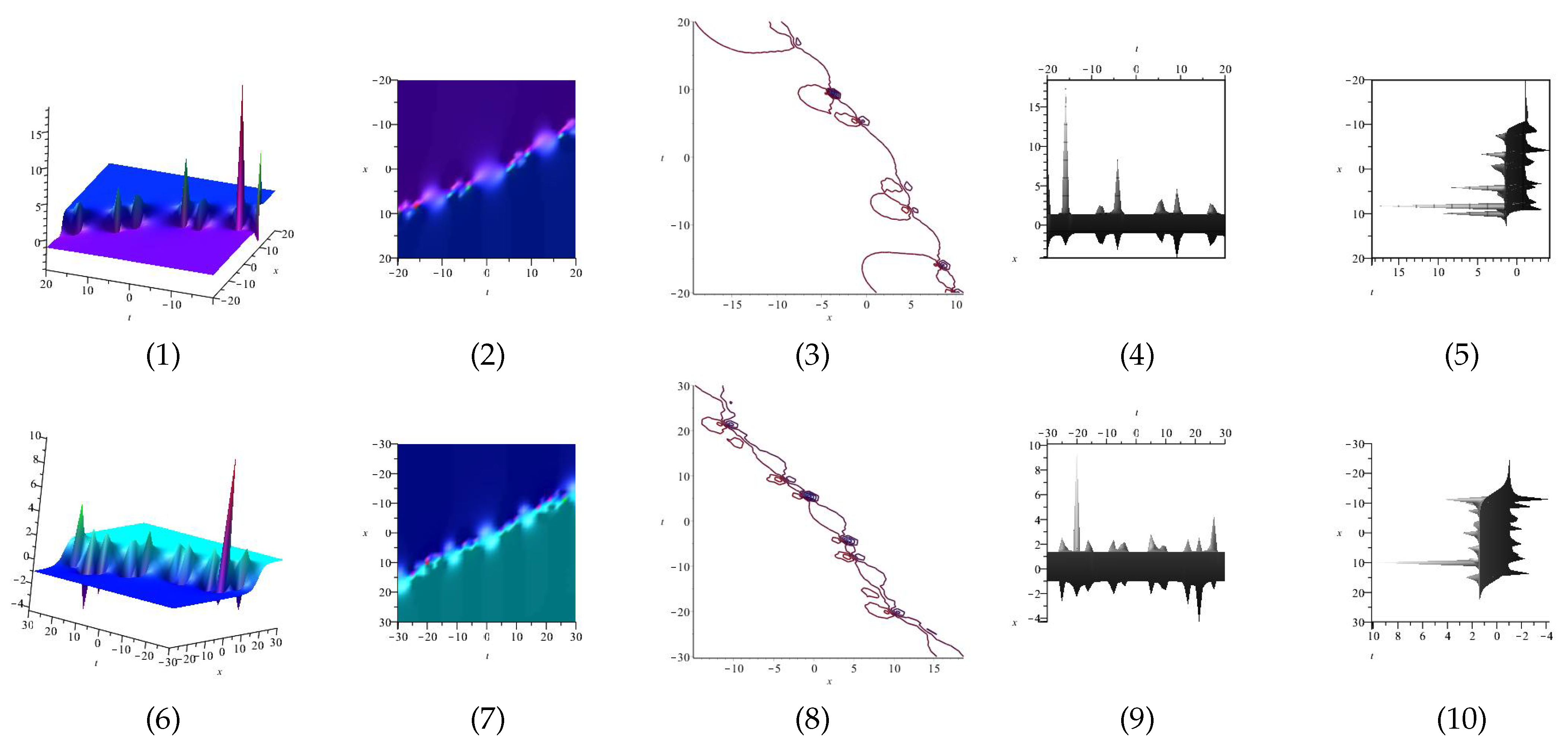
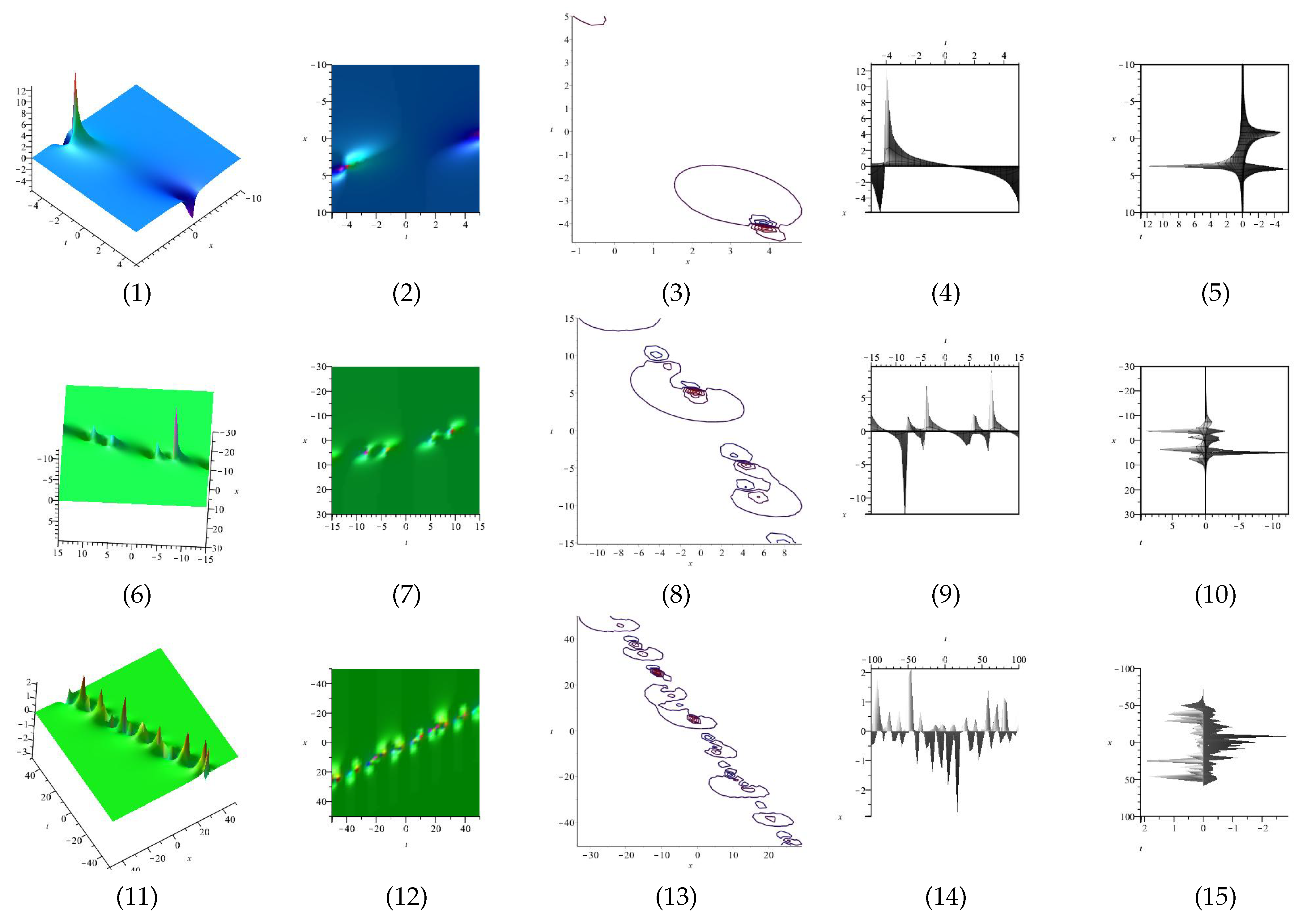
The real and imaginary part of Equation (61) are displayed in Figure 9 and Figure 10 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot.
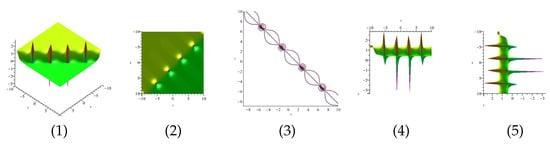
Figure 9.
The 3D and 2D with the diagram of real part of Equation (61).
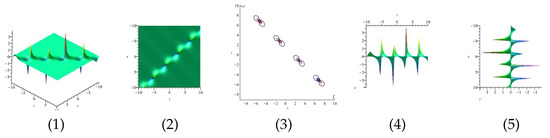
Figure 10.
The 3D and 2D with the diagram of imaginary part of Equation (61).
• Two wave solutions for (3):
Here, introduce a variable as follows
where and are constants. Obviously, has the following linear partial differential relations
Then, we consider a pair of polynomials of degree two
where is a constant to be determined from (1). Therefore, we have
By setting above values in (66), the two wave solutions can be proposed by
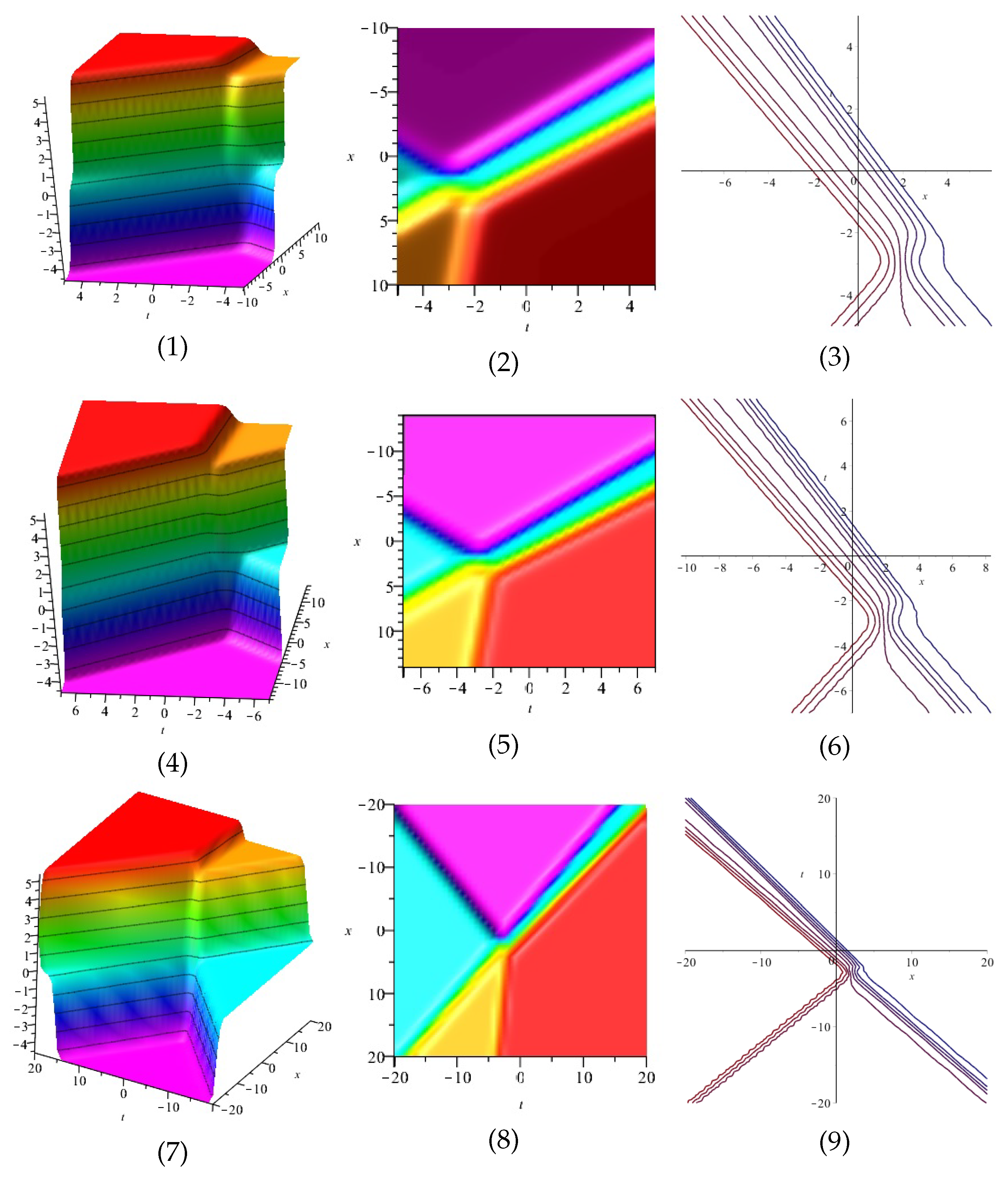
The real and imaginary part of equation are displayed in Figure 11 and Figure 12 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot.
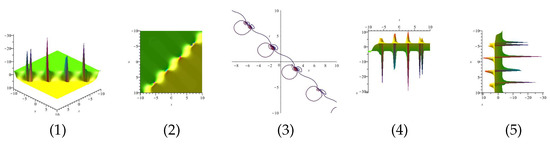
Figure 11.
The 3D and 2D with the diagram of the real part of equation .
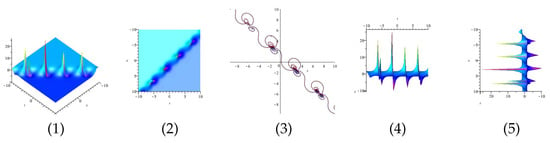
Figure 12.
The 3D and 2D with the diagram of the imaginary part of equation .
• Three wave solutions for (3):
Here, introduce a variable as follows
where and are constants. Obviously, has the following linear partial differential relations
Then, we consider a pair of polynomials of degree three
and
where and are constants to be determined from (1). Therefore, we have
By inserting above values in (69), we obtain respectively.
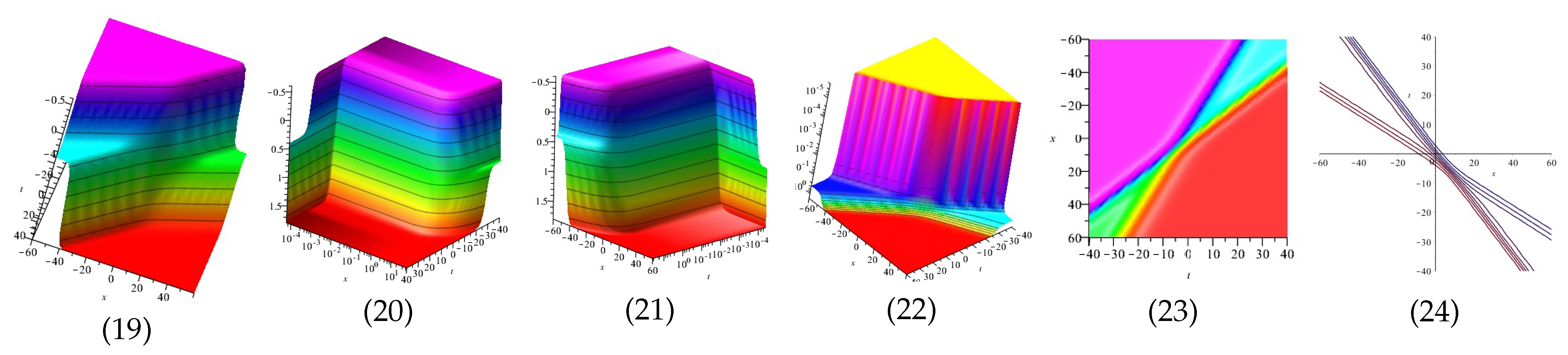
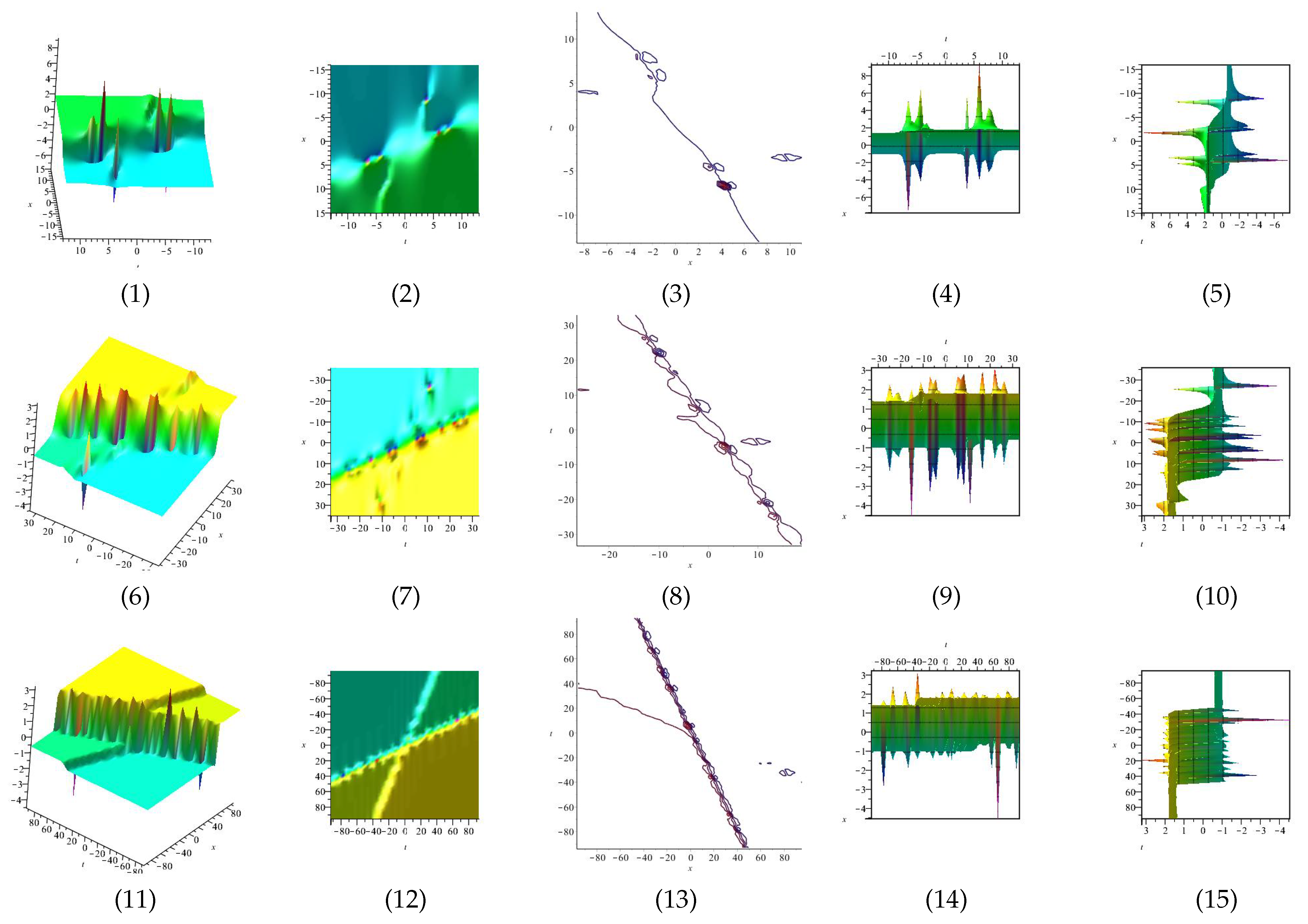
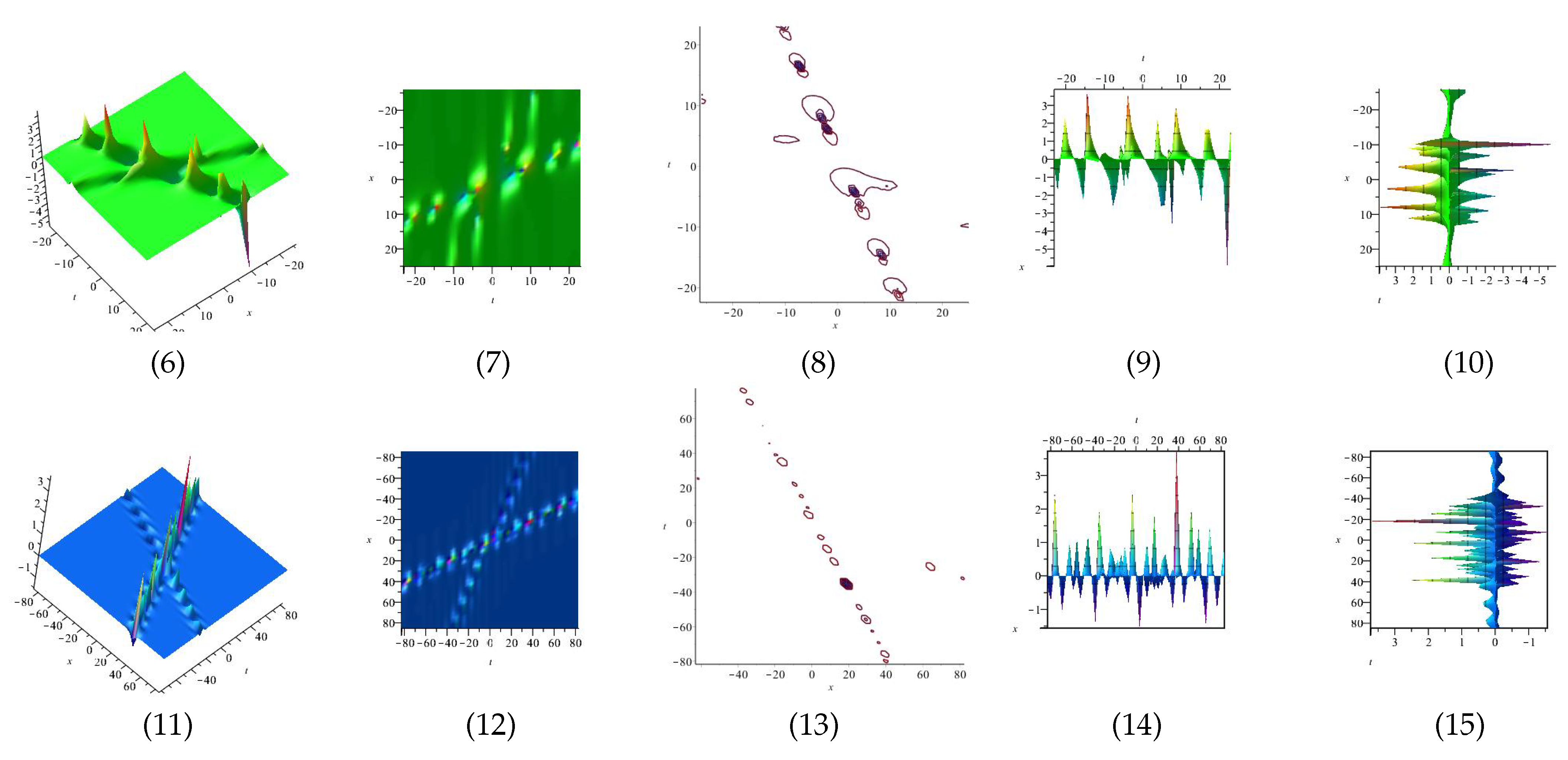
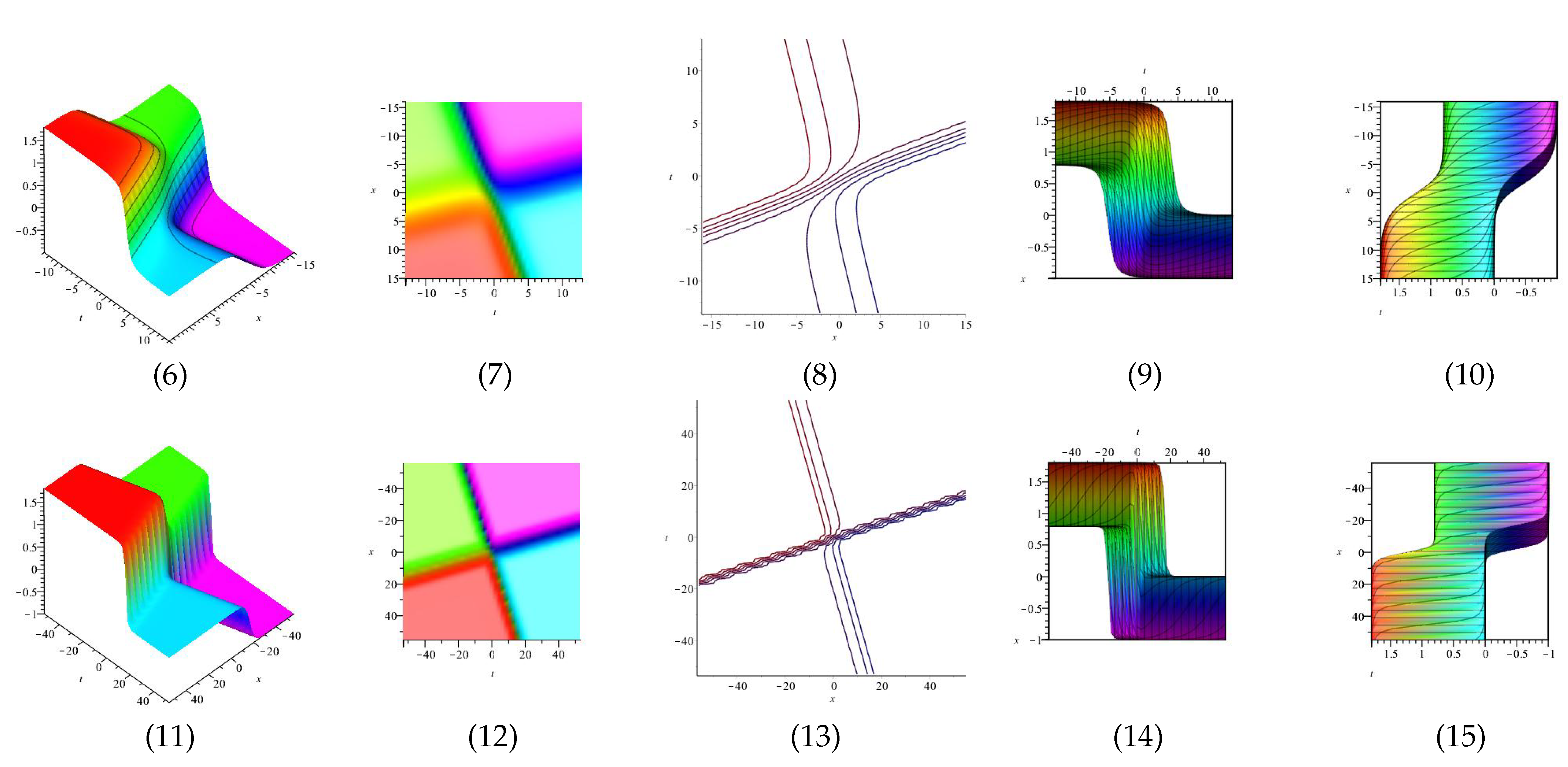
The real and imaginary part of equation and are displayed in Figure 13, Figure 14, Figure 15 and Figure 16 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot, in different domains.
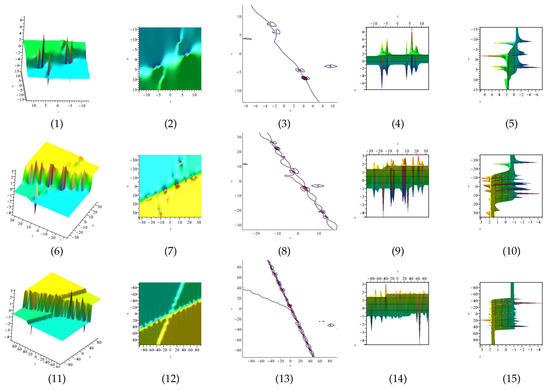
Figure 13.
The 3D and 2D with the diagrams of the real part of equation , in three different domains, for and display axis, axis and axis orientations, respectively, and are contour plots, in different domains.

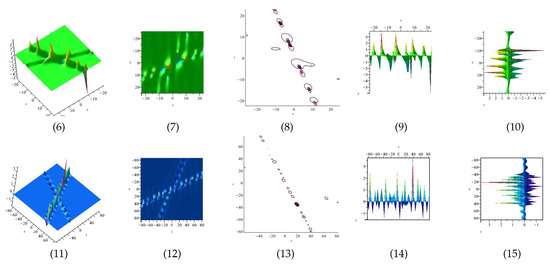
Figure 14.
The 3D and 2D with the diagram of the imaginary part of equation , in three different domains, for and display axis, axis and axis orientations, respectively, and are contour plots, in different domains.
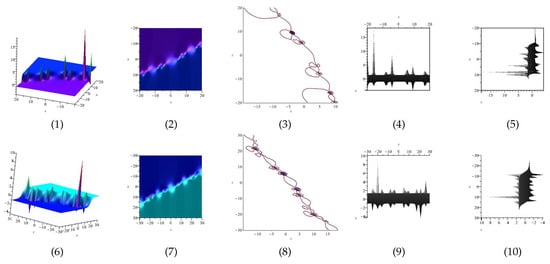
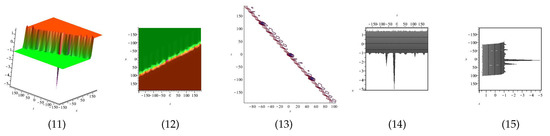
Figure 15.
The 3D and 2D with the diagram of the real part of equation , in three different domains, for and display axis, axis and axis orientations, respectively, and are contour plots, in different domains.
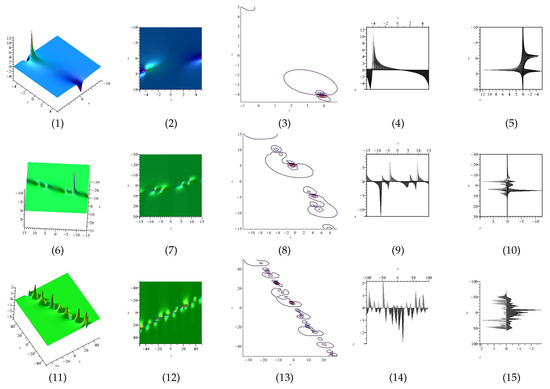
Figure 16.
The 3D and 2D with the diagram of the imaginary part of equation , in three different domains, for and display axis, axis and axis orientations, respectively, and are contour plots, in different domains.
3.2.3. Example 3
Here, we apply MEFM to construct the new exact solutions for the (2+1)-dimensional equation (4).
• One wave solutions for (4):
According to the above values, we obtain , respectively.
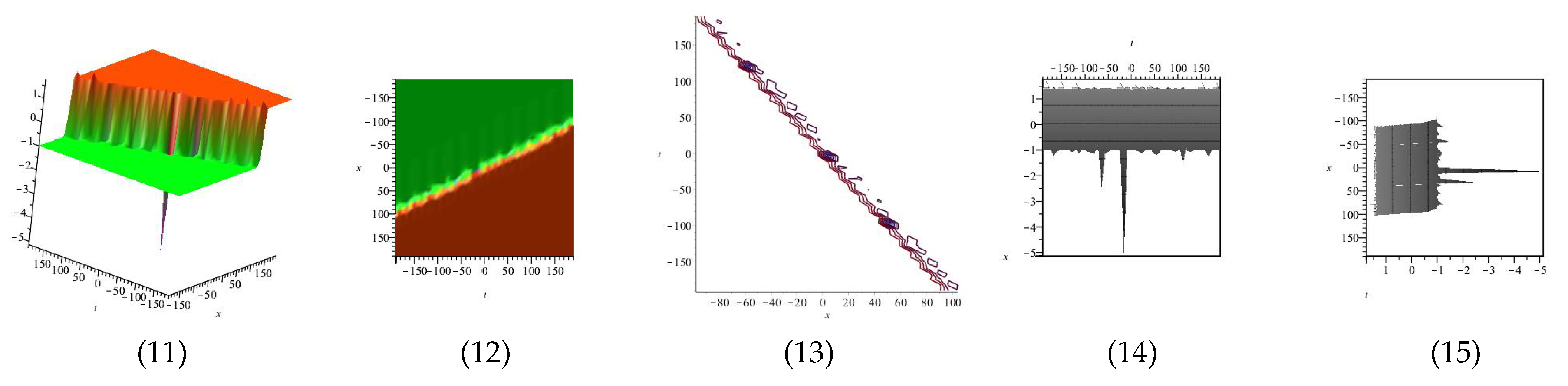
Equation is displayed in Figure 17 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot, in different domains.
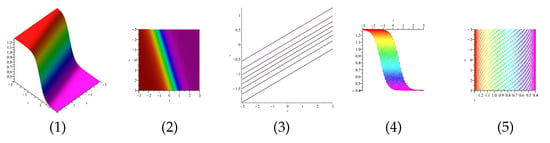
Figure 17.
The 3D and 2D with the diagram of equation .
• Two wave solutions for (4):
According to the above values, we obtain respectively.
Equation is displayed in Figure 18 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot, in different domains.
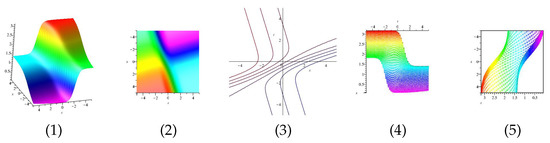
Figure 18.
The 3D and 2D with the diagram of equation .
• Three wave solutions for (4):
and
According to the above values, we obtain and , respectively.
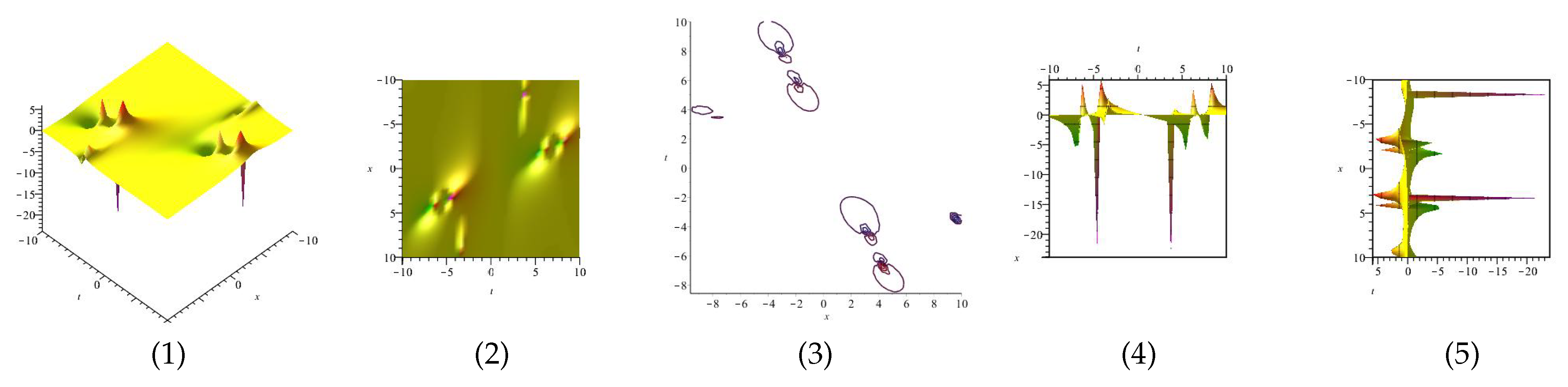
Equation is displayed in Figure 19 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot, in different domains. Equation is displayed in Figure 20 for (1) is three dimensional with (2), (4) and (5) exploit axis, axis, axis orientation, respectively, and (3) is contour plot, in different domains.
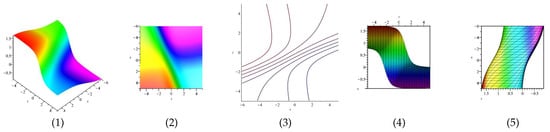
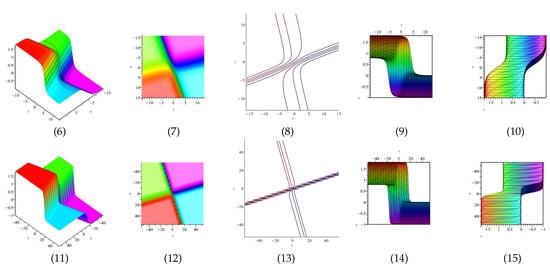
Figure 19.
The 3D and 2D with the diagram of equation , in three different domains, for and and display axis, axis, axis orientations, respectively, and are contour plots, in different domains.
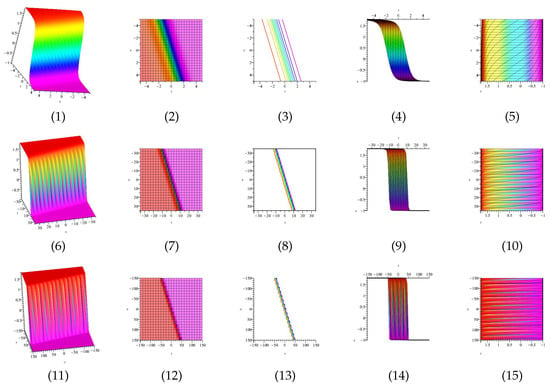
Figure 20.
The 3D and 2D with the diagram of equation , in three different domains, for and and display axis, axis, axis orientations, respectively, and are contour plots, in different domains.
4. Results and Discussion
In Figures Table 1, Table 2 and Table 3, for specific values, we propose the numerical solutions of (1). As you can see, in each stage, the obtained results are nearer to each other than the previous stages. We can conclude that the presented MEFM results in the unique solution of nonlinear PDEs in higher stages.

Table 1.
Numerical solutions for one wave solutions of (1).
Table 2.
Numerical solutions for two wave solutions of (1).
Table 3.
Numerical solutions for three wave solutions of (1).
Indeed, in Section 2, we studied the existence and uniqueness the solution of (1), and then we investigated the stability of that. Next, by an analytical method, MEFM, we obtained the solutions of the mentioned nonlinear PDE. Now, in this section, according to Table 1, Table 2 and Table 3, we can prove that in higher stages of MEFM, the obtained solutions overlap each other. In other words, we can observe the uniqueness of solution of (1).
Although this method can construct the multiple wave solutions to nonlinear equations, calculating each wave solution separately takes a lot of time; this can be one of the shortcomings of this method.
5. Conclusions
In this study, firstly, through an alternative theorem, we studied the existence and uniqueness of solution of some nonlinear PDEs which contains high nonlinear terms and then investigated the UHR stability of solution. Secondly, we applied a relatively novel analytical technique, the MEFM, to obtain the multiple wave solutions of presented nonlinear equations. Finally, we presented the numerical results in tables and discuss the advantages and disadvantages of the presented method.
Author Contributions
S.R.A., writing—original draft preparation. R.S., methodology and project administration. D.O., methodology, writing—original draft preparation and project administration. F.S.A., writing—original draft preparation and project administration. All authors conceived of the study, participated in its design and coordination, drafted the manuscript, participated in the sequence alignment and read and approved the final manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
The authors extend their appreciation to the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) for funding and supporting this work through Research Partnership Program no RP-21-09-08.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare that they have no competing interests.
References
- Javeed, S.; Abbasi, M.A.; Imran, T.; Fayyaz, R.; Ahmad, H.; Botmart, T. New soliton solutions of Simplified Modified Camassa Holm equation, Klein–Gordon–Zakharov equation using First Integral Method and Exponential Function Method. Results Phys. 2022, 38, 105506. [Google Scholar] [CrossRef]
- Gonzalez-Gaxiola, O.; Biswas, A.; Ekici, M.; Khan, S. Highly dispersive optical solitons with quadratic-cubic law of refractive index by the variational iteration method. J. Opt. 2022, 51, 29–36. [Google Scholar] [CrossRef]
- Zhang, C. Analytical and Numerical Solutions for the (3+1)-dimensional Extended Quantum Zakharov-Kuznetsov Equation. Appl. Comput. Math. 2022, 11, 74–80. [Google Scholar]
- Aderyani, S.R.; Saadati, R.; Vahidi, J.; Allahviranloo, T. The exact solutions of the conformable time-fractional modified nonlinear Schrödinger equation by the Trial equation method and modified Trial equation method. Adv. Math. Phys. 2022, 2022, 4318192. [Google Scholar] [CrossRef]
- Tarla, S.; Ali, K.K.; Yilmazer, R.; Osman, M.S. New optical solitons based on the perturbed Chen-Lee-Liu model through Jacobi elliptic function method. Opt. Quantum Electron. 2022, 54, 1–12. [Google Scholar] [CrossRef]
- Zafar, A.; Ali, K.K.; Raheel, M.; Nisar, K.S.; Bekir, A. Abundant M-fractional optical solitons to the pertubed Gerdjikov-Ivanov equation treating the mathematical nonlinear optics. Opt. Quantum Electron. 2022, 54, 1–17. [Google Scholar] [CrossRef]
- Fahim, M.R.A.; Kundu, P.R.; Islam, M.E.; Akbar, M.A.; Osman, M.S. Wave profile analysis of a couple of (3+1)-dimensional nonlinear evolution equations by sine-Gordon expansion approach. J. Ocean. Eng. Sci. 2022, 7, 272–279. [Google Scholar] [CrossRef]
- He, J.H.; El-Dib, Y.O. Homotopy perturbation method with three expansions. J. Math. Chem. 2022, 59, 1139–1150. [Google Scholar] [CrossRef]
- Mohanty, S.K.; Kumar, S.; Dev, A.N.; Deka, M.K.; Churikov, D.V.; Kravchenko, O.V. An efficient technique of ()-expansion method for modified KdV and Burgers equations with variable coefficients. Results Phys. 2022, 37, 105504. [Google Scholar] [CrossRef]
- Chu, Y.; Shallal, M.A.; Mirhosseini-Alizamini, S.M.; Rezazadeh, H.; Javeed, S.; Baleanu, D. Application of modified extended Tanh technique for solving complex Ginzburg-Landau equation considering Kerr law nonlinearity. Comput. Mater. Contin. 2022, 66, 1369–1378. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Zaitsev, V.F. Handbook of Nonlinear Partial Differential Equations; Chapman and Hall/CRC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Aderyani, S.R.; Saadati, R.; Abdeljawad, T.; Mlaiki, N. Multi-stability of non homogenous vector-valued fractional differential equations in matrix-valued Menger spaces. Alex. Eng. J. 2022, 61, 10913–10923. [Google Scholar] [CrossRef]
- Moretlo, T.S.; Adem, A.R.; Muatjetjeja, B. A generalized (1+2)-dimensional Bogoyavlenskii–Kadomtsev–Petviashvili (BKP) equation: Multiple exp-function algorithm; conservation laws; similarity solutions. Commun. Nonlinear Sci. Numer. Simul. 2022, 106, 106072. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).