Abstract
This paper proposes an event-triggered model-free adaptive platoon control (MFAPC) solution for non-linear vehicle systems under denial-of-service (DoS) attacks. First, the non-linear vehicle system is transformed into an equivalent linear data model using the dynamic linearization technique. Second, to save limited communication resources and reduce the influence of cyber attacks, a novel event-triggered mechanism and attack compensation method are designed. Then, based on the equivalent linear data model, a new resilient event-triggered MFAPC algorithm is developed to achieve the vehicle platoon control objective under DoS attacks. Finally, the effectiveness of the proposed control scheme is verified using an example.
Keywords:
model-free adaptive platoon control; event-triggered; non-linear vehicle system; attack compensation; DoS attacks MSC:
93D25
1. Introduction
With the rapid development of human society and the economy, automobiles have become increasingly widely used and important in our lives. However, the increased number of cars inevitably brings with it a variety of problems, such as environmental pollution, energy shortages, traffic congestion, traffic accidents and so on, which have a serious impact on the development of society. In recent years, various intelligent traffic control methods have been applied to vehicle systems aiming to solve these problems. For example, longitudinal dynamics control for autonomous driving of intelligent vehicles using a sliding mode controller based on a radial basis function neural network was investigated in [1]. In [2], a new application framework for intelligent transportation systems (ITS) based on 5G network slicing was proposed. In [3], an intelligent traffic control scheme using cloud computing and big-data mining for ITS was developed.
Vehicle platoon control, as an intelligent control method, has been applied in vehicle systems. In [4], the vehicle platoon control problem of linear heterogeneous vehicle systems subject to disturbances was investigated and an control scheme was developed to guarantee the string stability of the platoon. Under the condition of input saturation, the vehicle platoon control problem was examined using a variable time headway strategy in [5]. In [6], the vehicular platoon control problem was investigated, with an event-triggered distributed adaptive observer used to ensure that the platoon achieved a stable state asymptotically. The authors of [7] proposed a longitudinal platoon controller for connected vehicles. In [8], a distributed consensus platooning problem affected by time-varying, heterogeneous and wireless communication delays was discussed. It is worth noting that the above studies are based on system models. However, many system models cannot be accurately applied in real scenarios. Thus, data-based control methods have been developed to address vehicle platoon control problems. A vehicle platoon control strategy to reduce energy consumption based on a reinforcement learning algorithm was proposed in [9]. The cooperative adaptive cruise control (CACC) problem was examined in [10]. In addition, the vehicle eco-adaptive cruise control problem was examined in [11] and an optimal control scheme to ensure the safe distance of the vehicles was proposed using a reinforcement learning method.
Model-free adaptive control (MFAC), as a kind of data-driven method, was first proposed in 1994 and has been widely applied [12,13,14,15,16,17,18,19,20]. The main feature of the MFAC method is that the plant can achieve its control objective based on measurement data for the system inputs/outputs. In [13], a dynamic linearization technique for single-input and single-output (SISO) non-linear discrete-time systems was proposed. In [14], a brief overview of the MFAC was presented. The data-driven MFAC problem for multiple-input and multiple-output (MIMO) non-linear discrete-time systems was discussed in [15]. In [17], the MFAC problem was solved using a full-form dynamic linearization technique. The MFAC problem for MIMO non-affine systems with unknown non-linear dynamics was investigated, and verified experimentally, in [18]. In [20], a model-free adaptive integral sliding mode controller was devised for non-linear discrete-time systems. In addition, in recent years, MFAC methods have been applied to vehicle systems. In [21], the model-free adaptive integral sliding-mode-constrained-control problem of autonomous vehicle parking systems was investigated. A novel dual successive projection-based MFAC approach was proposed and applied to autonomous cars in [22]. In [23,24], the heading control of unmanned surface vehicles was investigated using the MFAC method.
It should be noted that network communication resources are limited. To save resources, an event-triggered control scheme has been proposed for the controller design. There has been some research on event-triggered model-free adaptive control. The design problem of an event-triggered MFAC controller was studied in [25,26]. An event-triggered disturbance observer was designed to estimate the disturbance using intermittent system information in [27]. Additionally, the event-triggered model-free adaptive iterative learning control problem was investigated in [28]. It should be pointed out, however, that the event-triggered conditions under which results to date have been obtained [25,26,27,28] are complexed, which leads to an increase in computational costs. Therefore, it is necessary to design a simple event-triggered condition, which is a primary purpose of this paper.
With the development of networked communication technology, increasing attention has been paid to networked control systems [29,30,31,32,33]. In networked control systems, the system states measured by sensors are transmitted to the controller via a wireless network. Some network effects may occur during data transmission, such as time-delays, packet dropouts and malicious attacks, etc., which will degrade, or even destroy, system performance [34,35]. Consequently, some work has been carried out to solve these problems. In [36], the distributed consensus tracking problem under malicious denial-of-service (DoS) attacks was investigated. In [37], a class of networked non-linear systems affected by packet disorder and network-induced delay was discussed; [38] extended the result to the two-channel packet dropout case. In addition, the MFAC problem of non-linear systems suffering from fading measurements was studied in [39]. It is noted that cyber attacks are inevitable, threatening system safety and performance. There have been some investigations focusing on network attacks in relation to the MFAC problem. A resilient control scheme for non-linear systems suffering from fading measurements was designed in [40]. In [41], an MFAC scheme based on an attack predictor was devised against jamming attacks for non-linear cyber-physical systems. In [42], the data-based MFAC problem for non-linear cyber-physical systems with event-triggered communication scheduling was investigated. However, in [41,42], the time-varying parameters used to estimate the non-linear characteristics were assumed not to be attacked, which is a strong assumption. Therefore, it is worth exploring how this assumption might be avoided.
Motivated by the above analyses, the event-triggered model-free adaptive platoon control (MFAPC) problem of non-linear vehicle systems under DoS attacks was investigated in this paper. First, the non-linear vehicle systems were transformed into a linear data model via linearization. Then, a resilient event-triggered MFAPC scheme was designed to achieve the vehicle platoon control target under DoS attacks. The contributions of this paper are as follows:
(1) In contrast to existing MFAC-based vehicle control methods [21,22,23,24], a novel MFAC framework for vehicle platoon control under DoS attacks is established. To mitigate the effects of DoS attacks, a new attack compensation mechanism is proposed using the latest available data. Then, a resilient event-triggered MFAPC algorithm is designed to enable simultaneous velocity and path tracking.
(2) Compared with existing event-triggered MFAC results reported in [26,28], where the event-triggered condition requires an additional tracking error trigger condition, the proposed event-triggered condition removes additional conditions, so that the event-triggered design is less conservative.
The remainder of this paper is arranged as follows: The MFAPC framework and formulation of the problem are described in Section 2. The security analysis undertaken and the control algorithm design are described in Section 3. The simulation results and conclusions are presented in Section 4 and Section 5, respectively.
2. MFAPC Framework and Problem Formulation
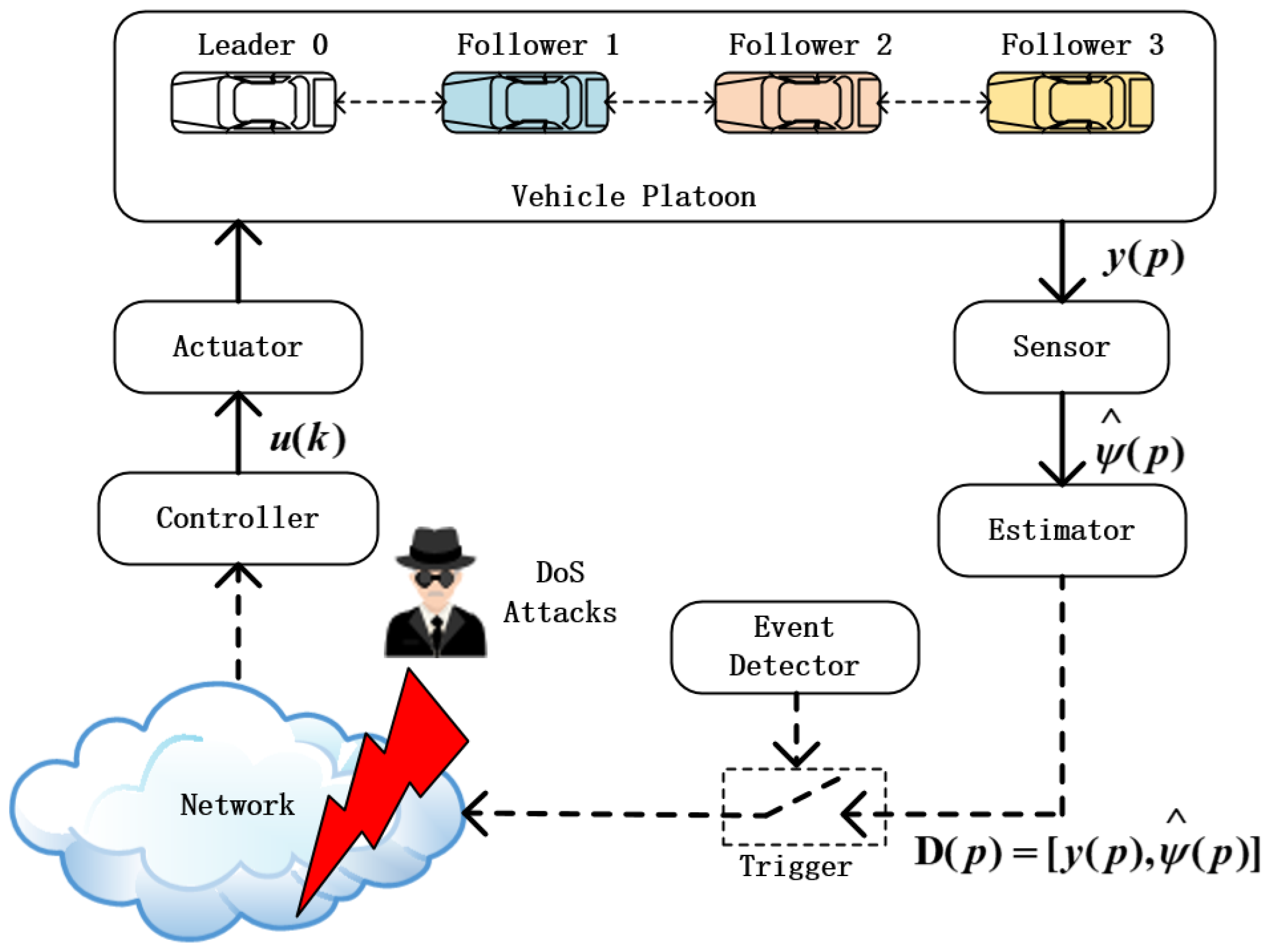
The system framework for a non-linear vehicle system under DoS attacks is illustrated in Figure 1. The sensor measures the system output, i.e., the position and velocity of the vehicle. The estimator is used to estimate the adaptive parameter. The system outputs and estimated adaptive parameter are packaged and transmitted to the controller via a wireless network that may be attacked.
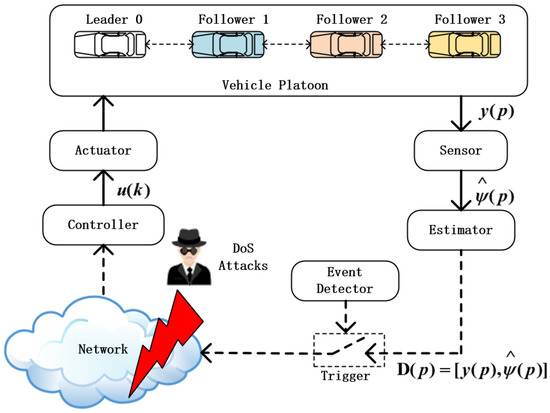
Figure 1.
System framework with DoS attacks.
2.1. Vehicle System Modeling
Considering the platoon control problem for vehicles moving along the road, the dynamic model of the ith vehicle is described by
where , and represent the position, velocity and control input of the ith vehicle, respectively. is an unknown non-linear function.
The leading vehicle is described as
Remark 1.
The leading vehicle provides reference signals to the following vehicle. Therefore, the control input of the leading vehicle is not considered in this paper. Moreover, it is assumed that the information for the leading vehicle is not affected by network attacks.
The following assumptions and lemmas are used:
Assumption 1.
The partial derivative of with respect to is continuous [14].
Assumption 2.
The non-linear systems satisfy the generalized Lipschitz condition that the output changes with , , and is a constant [14].
Lemma 1.
For non-linear systems that satisfy Assumptions 1, 2 and for all p, there exists a time-varying pseudo-partial derivative (PPD) parameter such that the non-linear systems can be converted to the following compact-form dynamic linearization data model [15]:
where is bounded and satisfies , with being a constant. If , then define .
Assumption 3.
The sign of the PPD parameter remains unchanged for all p and satisfies or for all p, where is a constant.
For the purpose of studying the vehicle platoon control problem, redefine the output of the vehicle platoon system (2) as with being determined later, then the increment form is calculated as . According to (2), we can get and . Then, we have
with , , . Similar to [23,24], and according to Lemma 1 and Assumptions 2 and 3, one has and .
2.2. MFAPC Algorithm Design
The actual value is generally difficult to obtain. Therefore, an estimator is designed to estimate to solve this problem. Then, the performance function is defined as follows:
where is the estimated value of and is a weighting constant.
Taking the derivative of with respect to and letting the result equal 0, one gets
with the step factor being introduced to make algorithm (7) more flexible and general.
To accomplish the vehicle platoon control task, the performance function with respect to is defined as follows:
where is a given reference output according to (3). is a weighting constant. represents the safety distance between the ith vehicle and the leading vehicle.
Minimizing the performance function (8) with respect to , one gets
where the role of is the same as in (7).
Remark 2.
In this controller, the distances are assumed to be available, which can also be obtained using between-vehicle sensing distances via . Moreover, this controller is a theoretical formulation. In practice, the “future” data can be obtained via estimation techniques, possibly with acceptable small errors.
2.3. Event-Triggered Mechanism Design
The MFAC scheme devised above communicates continuously, which wastes network communication resources. To save network resources, event-triggered control is used. Assuming that the set of the event-triggered instants is determined as , then, the event-triggered mechanism is designed as follows:
where and are the event-triggered thresholds. and with are the measurement errors. is the tracking error.
The controller receives packets at the event-triggered instant , which is generated by the following event-triggered condition:
Then, the control input is updated as follows:
2.4. MFAPC Modeling under DoS Attacks
For a system framework under DoS attacks, we know that the DoS attacks intend to destroy system performance by blocking the data packets transmitted between the controller and the sensor/estimator. If the wireless network is attacked, the controller will not receive the data packets , i.e., . Otherwise, the data packets can be received by the controller. When DoS attacks occur, the redefined system will be converted to the following form:
where is an indicator function that represents the consequence of DoS attacks in the communication network, with indicating that the DoS attacks to the communication are completely successful, and otherwise. Assume that conforms to the Bernoulli distribution, with probabilities of the successful and the failing DoS attacks being and , respectively.
An attack compensation mechanism is proposed as
Remark 3.
The compensation mechanism can reduce the impact of DoS attacks. When there are DoS attacks in communication networks, the indicator function and ; that is, using the latest received system output stored in the buffer, the impacts of DoS attacks will be compensated for. The sensor measures the vehicle output and the estimator estimates the time-varying parameter based on to obtain . Then, the system output and estimated time-varying parameter are packaged and transmitted to the controller via an event detector and the wireless network that may be attacked. The buffer is embedded into the controller as an attack compensator to reduce the influence of network attacks. Once the packets are transmitted to the buffer they will be stored and used to compensate for lost packets during network attacks.
According to the above analysis, the designed MFAPC algorithm is given as follows:
where represents a small constant.
Remark 4.
The designed algorithm includes two aspects: the estimation algorithm and the reset algorithm (15), and the control algorithm (16). First, the estimation algorithm calculates the estimated PPD parameter and the reset algorithm (15) is used to reset if the reset condition is satisfied. Then, the control algorithm (16) calculates the control input based on the estimated PPD parameter, system output and the reference output.
Remark 5.
The proposed control strategy does not require a system model and only uses the inputs/outputs data of the closed-loop system in the design of the controller. This represents a necessary supplement to the model-based method when the dynamic model is difficult and inaccurate to obtain.
Problem 1.
For a non-linear vehicle system (2) under DoS attacks, the goal is to devise a resilient MFAPC scheme to accomplish the vehicle platoon task in the mean square sense, i.e., converges into the following small bounded set:
where is the upper bound of the tracking error.
3. Security Analysis
An analysis is presented below of the stability of the vehicle platoon system and determination of the control algorithm parameters.
Theorem 1.
Proof.
The proof consists of two parts. First, the estimation error of the PPD parameter is uniformly bounded. Then, based on the boundedness of the estimated PPD parameter, the tracking error is uniformly bounded in the mean square sense.
Defining , and subtracting the PPD parameter from both sides of Equation (15), we get
Then, taking the absolute value of (18),
It is clear that is monotonically increasing for and its minimum value is according to (15). Then, the following inequality holds for and :
where is a constant. According to Lemma 1, one has . Thus, . Then, according to (20), (19) is rewritten as
Therefore, the estimation error is uniformly bounded. Since is bounded, is bounded.
Then, the error system is obtained as
where the following transformation is used:
with obtained from (5).
Then, taking the absolute value and expectation of (22), one has
According to the event-triggered condition, one gets
Consequently, and . According to Lemma 1 and Assumption 3, there exists a positive constant such that
Letting , the following inequality holds for all :
Then, one can get
where is a constant. Since the control input cannot change too fast in the actual system, the increment of the control input should be bounded, denoted as for all p with being a constant. Then, one gets
where is a constant. Additionally, the increment of the desired output should be bounded, denoted as , where is a constant. Then, (25) can be converted to the following inequality:
Additionally, the following inequality can be obtained if :
Then, it follows from (31) that
Therefore, the tracking error is uniformly bounded in the mean square sense, i.e., converges to the following set:
□
Remark 6.
In contrast to the stability analysis of the data-driven platoon control scheme for non-linear vehicles [44], in the error system (22), the introduction of the measurement errors and caused by the event-triggered mechanism will make the stability analysis more complicated. Specifically, compared with the traditional control scheme where and are used in the controller, the trigger instant values and are used in the event-triggered control scheme (16). Then, by introducing the measurement error and , is replaced by and , and is replaced by and . This transformation will lead to additional terms appearing. To handle these two terms, the event-triggered condition (11) is designed. Then, the main difficulty is how to design its trigger condition. If the event-triggered condition with the additional term cannot be solved, this will affect the stability analysis.
4. Simulation and Experimental Results
An example is provided to test the effectiveness of the proposed control algorithm.
Consider the following vehicle platoon system:
The dynamic model of the leading vehicle is considered as
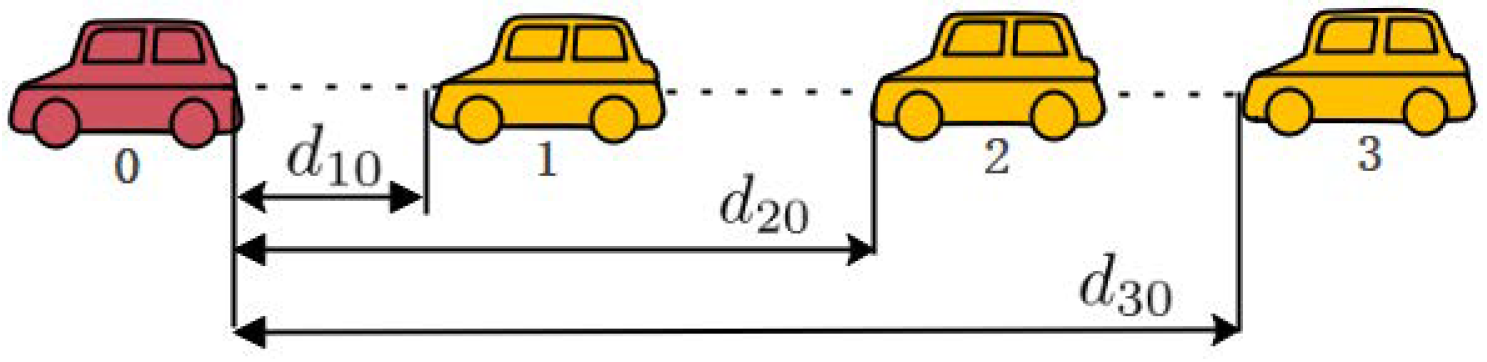
The vehicle platoon control scheme is presented in Figure 2. The distances between the ith vehicle and the leading vehicle are metre, metre and metre, respectively, and the initial values are , , and . By Theorem 1, the control parameters are , , , and . The sampling period is and the probability of successful DoS attacks is . The parameters of the event-triggered mechanism are selected as and .
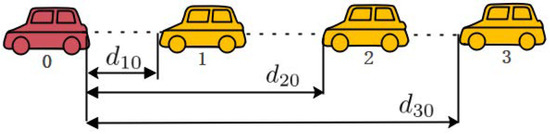
Figure 2.
The vehicle platoon control scheme.
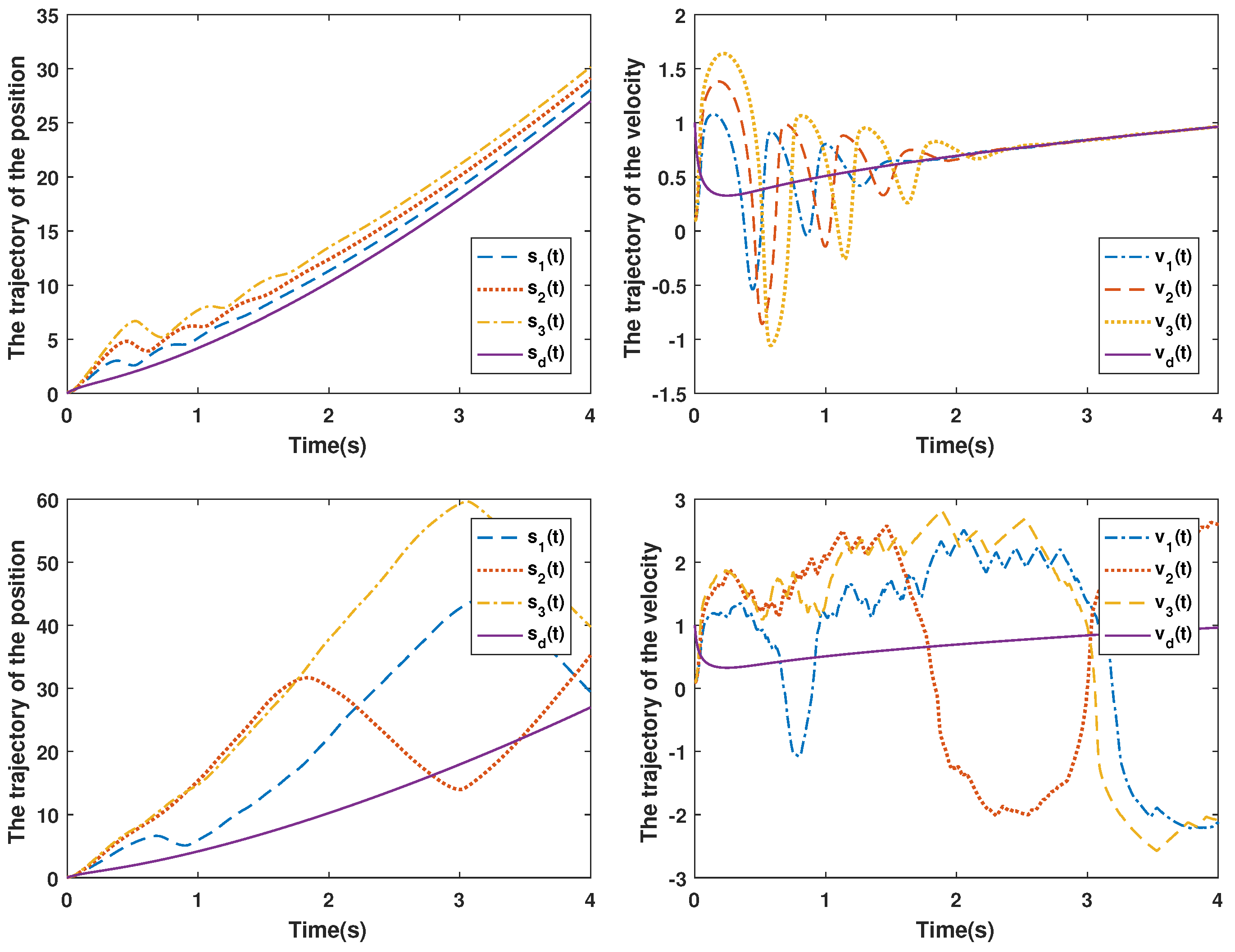
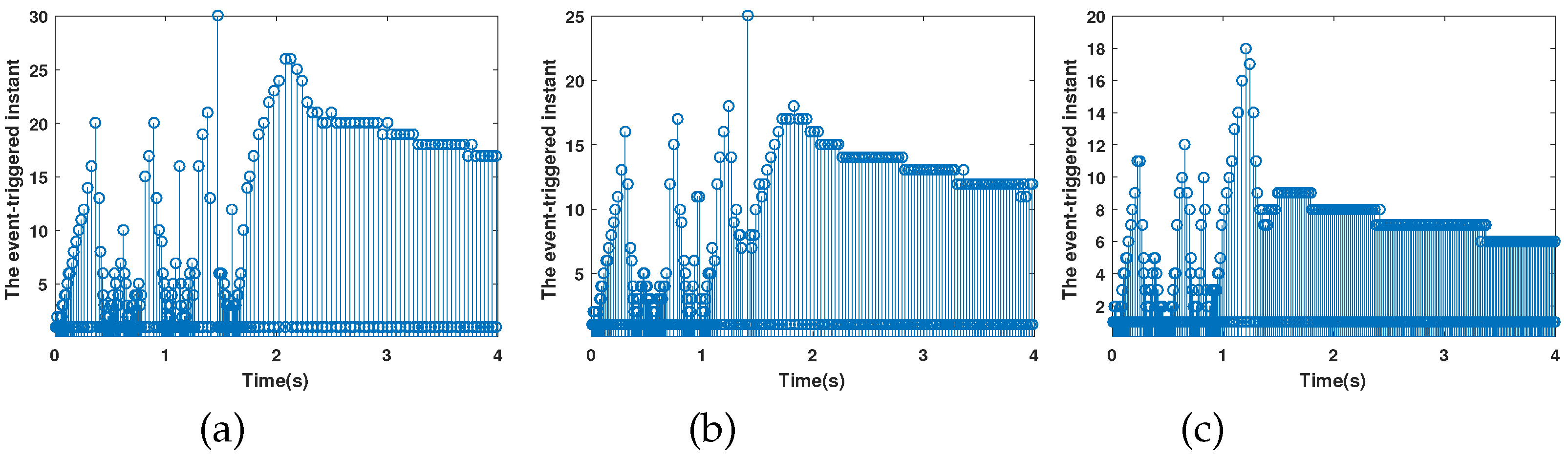
Figure 3 shows a comparison of the control scheme proposed here and in [13]. The vehicular platoon control objective is achieved using the proposed method under DoS attacks; that is, there is a safety distance between the following vehicles and the leading vehicle, and the velocity of the following vehicles can track the velocity of the leading vehicle at the same time. However, the vehicular control objective cannot be achieved using the control method designed in [13] under DoS attacks. The event-triggered instants of all vehicles are illustrated in Figure 4; Figure 4a–c denote the event-triggered instants for vehicle 1, 2 and 3. By calculation, the number of communication packets of vehicles 1, 2 and 3 are 598, 433 and 393 (number of communication packets under time-triggered: 2000), respectively, which implies that the packet transmission rate is reduced by , and , respectively. Therefore, the designed event-triggered mechanism can effectively reduce the network communication.
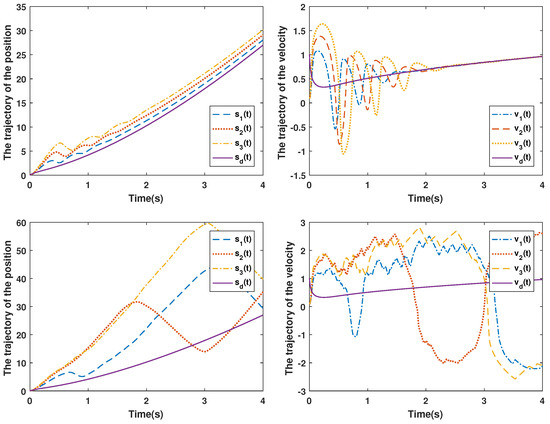
Figure 3.
The trajectories of the position and velocity of the vehicular platoon system between the proposed method (up) and the method in [13] (down).
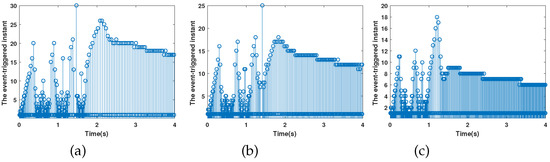
Figure 4.
The event-triggered instant. (a–c) denote the event-triggered instants for vehicle 1, 2 and 3.
In contrast to the existing vehicle platoon control result [44], the event-triggered mechanism is introduced into the vehicle platoon control scheme to save the limited network communication resources. By simulation, the number of communication packets without using the event-triggered mechanism [44] were 2000, 2000, 2000 (i.e., time-trigger) for vehicles 1, 2 and 3, but the number of communication packets for vehicles 1, 2 and 3 using the proposed event-triggered mechanism were 598, 433 and 393. Therefore, compared with the vehicle platoon control scheme without considering the event-triggered mechanism [44], the proposed event-triggered vehicle platoon control scheme can achieve the control task with limited network communication resources.
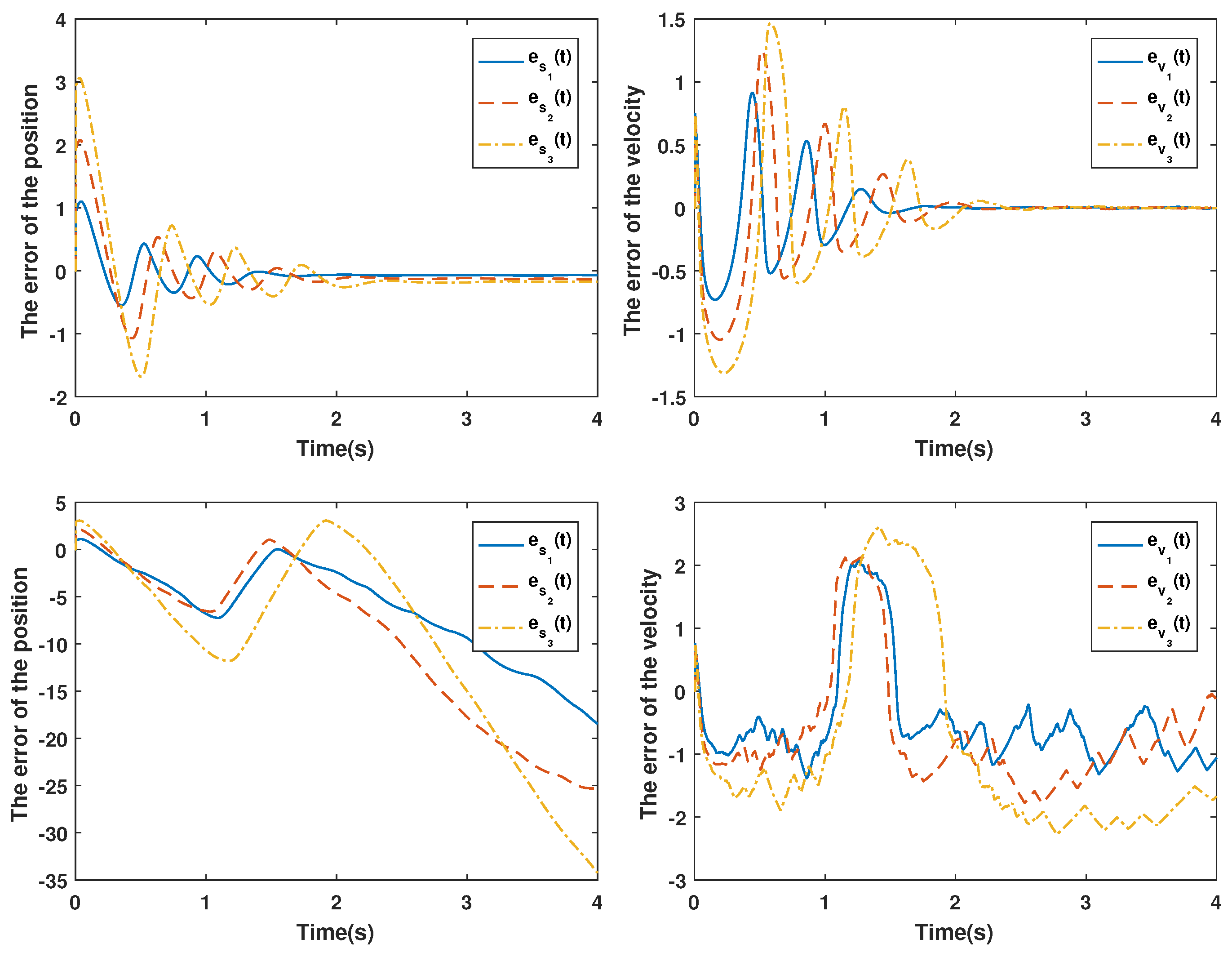
The effectiveness of the proposed method is more clearly illustrated in Figure 5. The 2-norms of the errors between the method proposed and [13] are shown in Table 1, where and are the 2-norms of the tracking errors of the velocity and position in the ith vehicle, respectively.
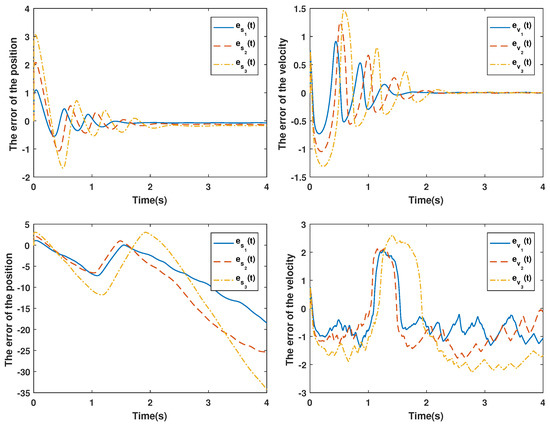
Figure 5.
The errors of the position and velocity for the vehicular platoon system between the proposed method (up) and the method in [13] (down).

Table 1.
The 2-norms of the tracking errors of the position and velocity.
5. Conclusions
The data-driven event-triggered platoon control problem was addressed for non-linear vehicle systems under DoS attacks. The input-output equivalent linear data model for a non-linear vehicle system was established using a dynamic linearization technique and the event trigger mechanism was used to save communication resources. Then, a novel resilient control scheme was developed to resist DoS attacks. In this scheme, a new attack compensation mechanism was designed to reduce the impact of DoS attacks based on the latest received system information. The simulation results show that the algorithm was able to achieve the platoon control target under DoS attacks well and save communication resources effectively. Future work will mainly focus on the dynamic event-triggered platoon control problem under a class of aperiodic DoS attacks.
Author Contributions
Conceptualization, L.Z. and W.C.; methodology, Z.W. and W.C.; software, L.Z.; validation, Z.W. and W.C.; formal analysis, Z.L.; writing—original draft preparation, Z.L.; writing—review and editing, Z.L., L.Z. and Z.W.; supervision, W.C.; funding acquisition, W.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China grant number 62273191; the Natural Science Foundation of Shandong Province grant number ZR2020KF034.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, S.; Hui, Y.; Sun, X.; Shi, D. Neural network sliding mode control of intelligent vehicle longitudinal dynamics. IEEE Access 2019, 7, 162333–162342. [Google Scholar] [CrossRef]
- Saraiva, T.D.V.; Campos, C.A.V.; Fontes, R.D.R.; Rothenberg, C.E.; Sorour, S.; Valaee, S. An application-driven framework for intelligent transportation systems using 5G network slicing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5247–5260. [Google Scholar] [CrossRef]
- Mu, S.; Xiong, Z.; Tian, Y. Intelligent traffic control system based on cloud computing and big data mining. IEEE Trans. Ind. Inform. 2019, 15, 6583–6592. [Google Scholar]
- Xu, L.; Zhuang, W.; Yin, G.; Bian, C.; Wu, H. Modeling and robust control of heterogeneous vehicle platoons on curved roads subject to disturbances and delays. IEEE Trans. Veh. Technol. 2019, 68, 11551–11564. [Google Scholar] [CrossRef]
- Chen, J.; Liang, H.; Li, J.; Lv, Z. Connected automated vehicle platoon control with input saturation and variable time headway strategy. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4929–4940. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, J.; Wang, Z.; Yan, H.; Zhang, C. Distributed adaptive event-triggered control and stability analysis for vehicular platoon. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1627–1638. [Google Scholar] [CrossRef]
- Li, Y.; Zhong, Z.; Song, Y.; Sun, Q.; Sun, H.; Hu, S.; Wang, Y. Longitudinal platoon control of connected vehicles: Analysis and verification. IEEE Trans. Intell. Transp. Syst. 2020, 23, 4225–4235. [Google Scholar] [CrossRef]
- di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Li, M.; Cao, Z.; Li, Z. A reinforcement learning-based vehicle platoon control strategy for reducing energy consumption in traffic oscillations. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5309–5322. [Google Scholar] [CrossRef]
- Song, X.; Feng, D.; Feng, X. Data-driven optimal cooperative adaptive cruise control of heterogeneous vehicle platoons with unknown dynamics. Sci. China-Inf. Sci. 2020, 63, 9. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Ecological adaptive cruise control for vehicles with step-gear transmission based on reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4895–4905. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Model Free Adaptive Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control Syst. Technol. 2011, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Chi, R.; Gao, H. An overview of dynamic-linearization-based data-driven control and applications. IEEE Trans. Ind. Electron. 2017, 64, 4076–4090. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Trans. Neural Netw. 2011, 22, 2173–2188. [Google Scholar] [PubMed]
- Chi, R.; Zhang, H.; Huang, B.; Hou, Z. Quantitative Data-Driven Adaptive Iterative Learning Control: From Trajectory Tracking to Point-to-Point Tracking. IEEE Trans. Cybern. 2020, 52, 4859–4873. [Google Scholar] [CrossRef] [PubMed]
- Hou, Z.; Xiong, S. On model-free adaptive control and its stability analysis. IEEE Trans. Autom. Control 2019, 64, 4555–4569. [Google Scholar] [CrossRef]
- Xiong, S.; Hou, Z. Model-free adaptive control for unknown MIMO nonaffine nonlinear discrete-time systems with experimental validation. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 1727–1739. [Google Scholar] [CrossRef]
- Bu, X.; Yu, W.; Yu, Q.; Hou, Z.; Yang, J. Event-Triggered Model-Free Adaptive Iterative Learning Control for a Class of Nonlinear Systems Over Fading Channels. IEEE Trans. Cybern. 2021, 52, 9597–9608. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G. Prescribed performance model-free adaptive integral sliding mode control for discrete-time nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2222–2230. [Google Scholar] [CrossRef]
- Xu, D.; Shi, Y.; Ji, Z. Model-free adaptive discrete-time integral sliding-mode-constrained-control for autonomous 4WMV parking systems. IEEE Trans. Ind. Electron. 2018, 65, 834–843. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Z.; Tian, T.; Deng, Z.; Li, Z. A novel dual successive projection-based model-free adaptive control method and application to an autonomous car. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3444–3457. [Google Scholar] [PubMed]
- Jiang, Q.; Liao, Y.; Li, Y.; Fan, J.; Miao, Y. Heading control of unmanned surface vehicle with variable output constraint model-free adaptive control algorithm. IEEE Access 2019, 7, 131008–131018. [Google Scholar] [CrossRef]
- Liao, Y.; Jiang, Q.; Du, T.; Jiang, W. Redefined output model-free adaptive control method and unmanned surface vehicle heading control. IEEE J. Ocean. Eng. 2020, 45, 714–723. [Google Scholar] [CrossRef]
- Liu, D.; Yang, G. Neural network-based event-triggered MFAC for nonlinear discrete-time processes. Neurocomputing 2018, 272, 356–364. [Google Scholar] [CrossRef]
- Lin, N.; Chi, R.; Huang, B. Event-triggered model-free adaptive control. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 51, 3358–3369. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y.; Zhang, H. Data-driven-based event-triggered tracking control for non-linear systems with unknown disturbance. IET Control Theory Appl. 2019, 13, 2197–2206. [Google Scholar] [CrossRef]
- Lin, N.; Chi, R.; Huang, B.; Hou, Z. Event-triggered nonlinear iterative learning control. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 5118–5128. [Google Scholar] [CrossRef]
- Mao, J.; Sun, Y.; Yi, X.; Liu, H.; Ding, D. Recursive filtering of networked nonlinear systems: A survey. Int. J. Syst. Sci. 2021, 52, 1110–1128. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.L.; Ge, X.; Wang, J. Secure state estimation and control of cyber-physical systems: A survey. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 51, 176–190. [Google Scholar] [CrossRef]
- Deng, C.; Zhang, D.; Gang, F. Resilient practical cooperative output regulation for MASs with unknown switching exosystem dynamics under DoS attacks. Automatica 2022, 139, 110172. [Google Scholar] [CrossRef]
- Li, Z.; Che, W. Event-triggered asynchronous periodic distributed secondary control of microgrids under DoS attacks. J. Frankl. Inst. 2022. [Google Scholar] [CrossRef]
- Yue, B.; Che, W. Data-Driven dynamic event-triggered fault-tolerant platooning control. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Ma, Y.; Che, W.; Deng, C.; Wu, Z. Observer-based event-triggered containment control for MASs under DoS attacks. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Che, W.; Deng, C.; Wu, Z. Distributed model-free adaptive control for learning nonlinear MASs under DoS attacks. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Wan, Y.; Wen, G.; Yu, X.; Huang, T. Distributed Consensus Tracking of Networked Agent Systems under Denial-of-Service Attacks. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 51, 61836196. [Google Scholar] [CrossRef]
- Pang, Z.; Liu, G.; Zhou, D.; Sun, D. Data-based predictive control for networked nonlinear systems with network-induced delay and packet dropout. IEEE Trans. Ind. Electron. 2016, 63, 1249–1257. [Google Scholar] [CrossRef]
- Pang, Z.; Liu, G.; Zhou, D.; Sun, D. Data-based predictive control for networked non-linear systems with two-channel packet dropouts. IET Control. Theory Applocations 2015, 9, 1154–1161. [Google Scholar] [CrossRef]
- Yu, W.; Wang, R.; Bu, X.; Hou, Z. Model free adaptive control for a class of nonlinear systems with fading measurements. J. Frankl. Inst.-Eng. Appl. Math. 2020, 357, 7743–7760. [Google Scholar] [CrossRef]
- Yu, W.; Wang, R.; Bu, X.; Hou, Z.; Wu, Z. Resilient Model-Free Adaptive Iterative Learning Control for Nonlinear Systems under Periodic DoS Attacks via a Fading Channel. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 52, 4117–4128. [Google Scholar] [CrossRef]
- Qiu, X.; Wang, Y.; Xie, X. Resilient model-free adaptive control for cyber-physical systems against jamming attack. Neurocomputing 2020, 413, 422–430. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, X.; Zhang, H.; Xie, X. Data-driven-based event-triggered control for nonlinear CPSs against jamming attacks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 3171–3177. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.; Hou, Z.; Li, D. Coordinated iterative learning control schemes for train trajectory tracking with overspeed protection. IEEE Trans. Autom. Sci. Eng. 2013, 10, 323–333. [Google Scholar] [CrossRef]
- Yue, B.; Che, W. Data-driven resilient platooning control for vehicular platooning systems with denial-of-service attacks. Int. J. Robust Nonlinear Control 2022, 32, 7099–7112. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).