Abstract
In this paper, we consider a class of multiobjective mathematical programming problems with equilibrium constraints on Hadamard manifolds (in short, (MMPEC)). We introduce the generalized Guignard constraint qualification for (MMPEC) and employ it to derive Karush–Kuhn–Tucker (KKT)-type necessary optimality criteria. Further, we derive sufficient optimality criteria for (MMPEC) using geodesic convexity assumptions. The significance of the results deduced in the paper has been demonstrated by suitable non-trivial examples. The results deduced in this article generalize several well-known results in the literature to a more general space, that is, Hadamard manifolds, and extend them to a more general class of optimization problems. To the best of our knowledge, this is the first time that generalized Guignard constraint qualification and optimality conditions have been studied for (MMPEC) in manifold settings.
MSC:
90C46; 90C48; 90C29; 58A05
1. Introduction
It has recently been observed that many practical problems have emerged in several branches of science and engineering, which can be modelled more efficiently on a manifold space than an Euclidean space; see [1,2]. Moreover, there are various advantages to extending and generalizing the optimization methods from Euclidean spaces to manifold spaces. For instance, a constrained optimization problem can be transformed into a much simpler unconstrained problem through the suitable use of the Riemannian geometry. Further, it is possible to get rid of non-convexity in many optimization problems through the introduction of appropriate Riemannian metrics (see, for instance, [3,4]). In manifold settings, the concepts of convex sets and convex functions are generalized to the concepts of geodesic convex sets and geodesic convex functions (see, for instance, [5,6]). The concepts of pseudoconvexity and quasiconvexity in a geodesic sense were introduced by Udrişte [6] in the Riemannian manifolds setting. Recently, many authors have generalized various other notions and concepts of optimization, from Euclidean spaces to Riemannian manifolds; see, for instance, [7,8,9,10,11,12,13,14,15,16,17,18] and the references cited therein.
A mathematical programming problem with equilibrium constraints (MPEC) is an optimization problem with certain complementarity constraints or variational inequality constraints. The initial conceptualization and formulation of (MPEC) is attributed to Harker and Pang [19]. (MPEC) has various real-life applications in several branches of engineering and science, for instance, hydro-economic river basin model problems [20], telecommunication [21], chemical engineering [22], etc. In recent years, several authors have extensively studied such problems; see, for instance, [23,24,25,26,27,28,29] and the references cited therein.
A comprehensive study of (MPEC) was presented by Luo et al. [30]. Feasibility conditions for (MPEC) were discussed by Fukushima and Pang [31]. A necessary optimality condition for a class of MPEC was given by Outrata [32]. Several stationary point concepts were introduced and discussed by Scheel and Scholtes [33]. Chen and Florian [34] derived regularity and optimality conditions for (MPEC) and deduced new constraint qualifications for such problems. Necessary and sufficient optimality conditions for (MPEC) were studied by Ye [35]. Abadie-type constraint qualification and Slater-type constraint qualifications for (MPEC) were provided by Flegel and Kanzow [36]. Further, Flegel and Kanzow [23] established that first-order optimality conditions for (MPEC) can be deduced under the assumption of a Guignard constraint qualification. KKT-type optimality conditions and duality results for (MPEC) were established by Singh and Mishra [28]. Sadeghi-Mobarakeh and Mohsenian-Rad [37] modelled an optimal bidding problem in performance-based regulation markets for a large price-maker regulation resource in terms of MPEC. Wogrin et al. [38] proposed a bi-level model in the form of an (MPEC), with the aim of providing assistance to a generation company making long-term generation capacity investment decisions, considering uncertainty regarding the investments of the other generation companies. The (MPEC) model was employed to study the strategic behaviors of a profit-driven energy hub in the electricity and heating markets against the background of energy system integration by Li et al. [39].
Motivated by the works of [23,28,35,40] and the references cited therein, in this paper, we study a class of multiobjective programming problems with equilibrium constraints on Hadamard manifolds (MMPEC). We introduce the generalized Guignard constraint qualification for MMPEC and employ it to derive the KKT-type necessary optimality criteria for (MMPEC). Further, we derive sufficient optimality criteria for (MMPEC) using geodesic convexity assumptions. We also provide a useful application of such problems in the field of process engineering, and discuss the advantages of modelling such problems on manifolds. Several non-trivial examples are given, which justify and validate the results derived in the paper.
The novelty and contributions of our work are twofold. In the first fold, we extend the corresponding results deduced by [35,40] to a more general space, namely, Hadamard manifolds, and generalize them to a more general class of optimization problems, namely, multiobjective mathematical programming problems with equilibrium constraints. In the second fold, we extend the corresponding optimality conditions given by Singh and Mishra [28] to a wider space, that is, Hadamard manifolds. Moreover, the results of this paper generalize some other well-known corresponding results in Euclidean spaces; see, for instance, [19,23,41]. To the best of our knowledge, generalized Guignard constraint qualification and optimality conditions of (MMPEC) on Hadamard manifolds were considered for the first time in this article.
This paper is organized as follows. Some basic mathematical preliminaries and concepts used in the sequel are discussed in Section 2. In Section 3, we introduce the generalized Guignard constraint qualification on Hadamard manifolds for (MMPEC) and employ it to derive the KKT-type necessary optimality conditions for our considered problem. In Section 4, sufficient optimality conditions for (MMPEC) were derived under the assumptions of geodesic convexity. An interesting application of mathematical programming problems with equilibrium constraints in the field of process engineering is described, and the advantages of modelling such problems on manifolds is discussed in Section 5. Conclusions are drawn in Section 6, together with some directions for future research.
2. Notation and Mathematical Preliminaries
Throughout the article, the standard notation is used to denote the n-dimensional Euclidean space. The set of all natural numbers is denoted by the standard notation . The symbol denotes the non-negative orthant of , that is,
The Euclidean inner product on is denoted by the symbol . For every , we employ the following notation:
The notation (respectively, ) indicates the negation of (respectively, ).
Now, we recall some fundamental concepts and definitions of Riemannian and Hadamard manifolds (see, for instance, [42,43,44,45]).
Any topological space is defined as a topological manifold of dimension n (in other words, topological n-manifold) if is Hausdorff, second-countable, and every element of is always contained in a neighborhood that is homeomorphic to an open subset of . Any pair , where V is some open set in , and is a homeomorphism from V to some open set in , is referred to as a chart (in other words, a coordinate chart) on the manifold . For every pair of coordinate charts and , for which is non-empty, the composite map is referred to as the transition map (see Figure 1). Any pair of charts and are referred to as smoothly compatible if either is empty or the transition map is infinitely continuously differentiable.
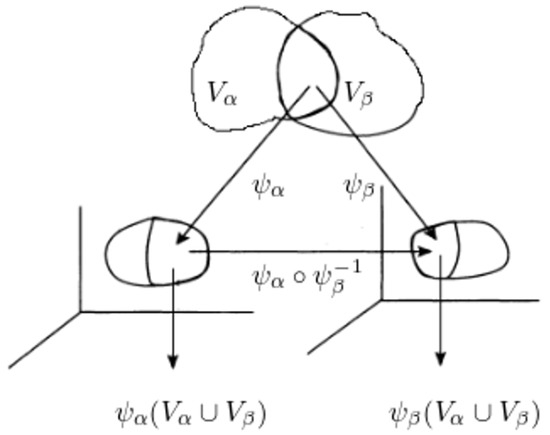
Figure 1.
Transition map.
Any collection of charts such that the corresponding open sets cover the manifold is referred to as an atlas. An atlas for is said to be smooth if every pair of coordinate charts in are smoothly compatible. A smooth atlas on is referred to be maximal if it is not properly contained in any larger smooth atlas. A maximal smooth atlas on the manifold is called a smooth structure. A smooth manifold is a pair (, where is some topological manifold and is a smooth structure on .
For an element , a curve is said to be of class around the element p if , and is continuously differentiable for every chart () around the element p. Let be any two curves about p. Then, and are said to be equivalent if, and only if, there is some chart () about the point p, such that
Any equivalence class of curves through a point on modulo the equivalence relation defined above is referred to as a tangent vector to at the point p.
The set containing all tangent vectors at the point p in is termed the tangent space to at p and is denoted by the symbol .
A symmetric and positive definite 2-tensor field defined on a smooth manifold is called a Riemannian metric. Every Riemannian metric induces an inner product on every tangent space , and this is denoted by for all . Any smooth manifold with a given Riemannian metric is termed a Riemannian manifold. The exponential map is defined by for any , where is the geodesic, starting at p with a velocity of v.
A Riemannian manifold is defined as a geodesic complete if, for every , is defined for element tangent vector . Any Riemannian manifold that is complete, connected, and has nonpositive sectional curvature, is referred to as a Hadamard manifold.
The following theorem, popularly known as the Hadamard–Cartan theorem, derives from Sakai ([46] Theorem 4.1, p. 221).
Theorem 1.
Let be any Hadamard manifold. Then, for every element , the exponential map is a diffeomorphism, such that the inverse exponential map satisfies . Furthermore, for every element , there is always some unique minimal geodesic satisfying .
The following definition of geodesic convex sets derives from Udrişte ([6], p. 57).
Definition 1.
Let be a Riemannian manifold and . Then, S is referred to as a geodesic convex set in if, for every pair of elements, , , and for every geodesic that joins p to q, we have
The following definition of geodesic convex functions derives from Rapcsák ([5], Definition 6.1.2, p. 64).
Definition 2.
Let S be a geodesic convex subset of a Riemannian manifold , and let be a function on S. Then, the function g is referred to as a geodesic convex function at if, for every element and for every geodesic joining y to z, the following inequality holds:
The function g is referred to as a geodesic strictly convex function at if the preceding inequality is strict, for and .
In particular, if is a Hadamard manifold, then g is referred to as a geodesic convex function at y if, and only if, the following holds:
The function g is referred to as a geodesic strictly convex function at if the preceding inequality is strict, for and .
For more details on geodesic convex functions on Hadamard manifolds, we refer the reader to [5,6,47,48] and the references cited therein. Unless specified otherwise, throughout the remainder of the paper, we shall use the symbol to denote a Hadamard manifold of dimension n.
3. Necessary Optimality Conditions for (MMPEC)
In this section, we formulate a multiobjective mathematical programming problem with equilibrium constraints on Hadamard manifolds (MMPEC). We introduce the generalized Guignard constraint qualification for MMPEC, and employ it to deduce the KKT-type necessary optimality criteria for MMPEC.
Let us consider the following multiobjective programming problem with equilibrium constraints on Hadamard manifolds (MMPEC):
where , ( are all smooth functions that are defined on a Hadamard manifold . The feasible set of our considered problem (MMPEC) is denoted by the set D.
For any , let us define the following index sets that will be helpful in the subsequent analysis.
Remark 1.
- (a)
- The index sets defined above clearly depend on the feasible element . However, in the rest of the paper, when such a dependence is easily understandable from the context, we avoid explicitly indicating this.
- (b)
- The set η is referred to as the degenerate set. Any arbitrary feasible element is said to satisfy the strict complementarity condition if .
We now introduce the function , defined as
Now, we recall the notions of an efficient solution and weakly efficient solution to MMPEC (see, for instance, [40]).
Definition 3.
Any feasible element is referred to as a Pareto efficient solution of the problem (MMPEC), if there is no element , such that
Definition 4.
Any feasible element is referred to as a weak Pareto efficient solution of the problem (MMPEC), if there is no element , such that
Let be an arbitrary feasible point. Now, we define the sets and S for every that will be used in the rest of the paper.
The following definition of the Bouligand tangent cone for a subset of a Hadamard manifold reives from Karkhaneei and Mahdavi-Amiri [43].
Definition 5.
Let and . The Bouligand tangent cone (in other words, contingent cone) of S at p, denoted by , is defined by
Now, we extend the definition of linearizing cone from Singh and Mishra [28] for MMPEC on Hadamard manifolds.
Definition 6.
For any , the linearizing cone to S at is defined as follows:
Remark 2.
Definition 6 extends Definition 3.1 from Maeda [40] from Euclidean spaces to Hadamard manifolds, and generalizes this to a wider class of optimization problems, namely, MMPEC. Moreover, it follows from the above definition that
To define the generalized Guignard constraint qualification for MMPEC, we now extend the definition of modified linearizing cone given by Singh and Mishra [28] from Euclidean space to Hadamard manifold.
Definition 7.
For any , the modified linearizing cone to S at is defined as follows:
Remark 3.
From Definitions 6 and 7, we have
In the following definition, we present the generalized Guignard constraint qualification for (MMPEC) on Hadamard manifolds.
Definition 8.
Let . Then, the generalized Guignard constraint qualification (GGCQ) is said to be satisfied at if and only if the following holds:
In the following theorem, we derive a necessary condition of efficiency for MMPEC.
Theorem 2.
Let be any arbitrary feasible point of MMPEC. Let us further assume that GGCQ is satisfied at . If is an efficient solution to MMPEC; then, the following system of inequalities
has no solution .
Proof.
On the contrary, let us assume that some vector exists, such that the following system of inequalities is satisfied:
Then, from Definition 7, we have
Without loss of generality, let us consider that
Since (GGCQ) is satisfied at , it follows that
Then, it follows that there some sequence exists, such that
For every , . Then, for any element of the sequence , there exists and , such that
since for every and , then by Definition 5, it follows that there are sequences , and , , with , such that
Let us set as follows:
Then, for every , we have the following:
Again, since is an efficient solution of MMPEC, it follows that:
From the Taylor expansion of at , for each , we have the following
Then, it follows that for each , we have
We have Then, as , it follows from Equation (2) that
Similarly, we can show that
From the continuity and linearity property of the inner product, it follows that
which is a contradiction. This completes the proof. □
In the following theorem, we derive the necessary optimality conditions for MMPEC using a generalized Guignard constraint qualification (GGCQ).
Theorem 3.
Let be an arbitrary feasible point of MMPEC. Let us further assume that GGCQ is satisfied at . If is an efficient solution of (MMPEC), then there exist Lagrange multipliers , , , , , such that
and
Proof.
Since is an efficient solution of MMPEC and GGCQ holds at , it follows from Theorem 2 that the following system of inequalities
has no solution . It is well-known that is a vector space of dimension n. In view of this fact, by employing Tucker’s theorem of alternative ([49] pp. 29–30), it follows that , , , , , such that
By setting ),),), we have
However, since , , , () , , , , we have
Hence, the required equations follow. This completes the proof. □
Now, we deduce the strong KKT type necessary optimality condition for MMPEC using a generalized Guignard constraint qualification (GGCQ).
Theorem 4.
Let be an efficient solution of MMPEC. Further, let us assume that GGCQ is satisfied at . Then, there exist Lagrange multipliers , , , and , , such that
Proof.
Since is an efficient solution of the MMPEC, such that GGCQ is satisfied at , then, from Theorem 3, we can infer that there are Lagrange multipliers , , , such that
and
Let us set the following
Then, it follows that
Therefore, the proof is completed. □
Remark 4.
- (i)
- The necessary optimality theorem (Theorem 4) extends Theorem 1 of Singh and Mishra [28] on a more general space, namely, Hadamard manifold;
- (ii)
- The necessary optimality theorem (Theorem 4) extends Theorem 3.2 of Maeda [40] to a more general space, namely, Hadamard manifold, and also generalizes this for multiobjective programming problems with equilibrium constraints.
The following example illustrates the significance of Theorem 4.
Example 1.
Let us consider the set as . Then, is a Riemannian manifold (see, for instance, [5,50], and Example 4.4 of [51]). is equipped with the metric , where denotes the standard inner product on and
is also a Hadamard manifold. The exponential map for any is given by , . The inverse of the exponential map for any is given by .
We consider the following multiobjective programming problem with equilibrium constraints on
where are smooth, real valued functions, defined on . The feasible set F for the problem is:
Let us consider the feasible point . Then, it can be verified that (GGCQ) is satisfied at . Further, it can be verified that is an efficient solution to the problem .
Now, we have the following
Substituting for in the above expressions, we obtain the following
Then, by choosing multipliers as , we obtain the following
Thus, the necessary optimality condition (Theorem 4) for the problem (P) is verified.
4. Sufficient Optimality Conditions for MMPEC
In this section, we derive sufficient optimality conditions for (MMPEC) under geodesic convexity assumptions.
The following definition extends the definition of M-stationary point (Definition 2.6) given by Ye [35] from Euclidean space to Hadamard manifolds for MMPEC.
Definition 9.
(M-stationary point) Let . Then is said to be a Mordukhovich stationary point (M-stationary point) if and , such that the following conditions are satisfied:
The following index sets, as defined below, will be helpful to derive the sufficient optimality condition for MMPEC on Hadamard manifold.
Now, we derive sufficient optimality conditions for MMPEC using geodesic convexity assumptions.
Theorem 5.
Let be a M-stationary point of MMPEC. Let us assume that each , , , , , , , are geodesic convex functions at . If
then is a weak Pareto efficient solution of MMPEC.
Proof.
However, let us suppose that is not a weak Pareto efficient solution of MMPEC. Then, it follows that there exists some , such that
From the geodesic convexity assumption on , , it follows that
Since is a M-stationary point, there exist and ∈, such that
where,
Since , we have the following
From the given hypothesis, we can see that is a M-stationary point of (MMPEC). Hence, it follows from (11)–(13) that
For every , we have . Then, from the geodesic convexity assumption on at , we can obtain the following
For every , we have . Then, from the geodesic convexity assumption on at , we can obtain
Similarly, we can yield the following
Again, . Then, from the geodesic convexity assumption on at , we can obtain
Using similar arguments, we can obtain the following
Remark 5.
The sufficient optimality condition (Theorem 5) extends Theorem 2.3 of Ye [35] on a more general space, namely, Hadamard manifold, and generalizes it to a more general class of programming problems, that is, multiobjective programming problems with equilibrium constraints.
The following example illustrates the significance of Theorem 5.
Example 2.
Let us consider the set as . Then, is a Riemannian manifold (see, for instance, [5,50], and Example 4.4 of [51]). is equipped with the metric , where denotes the standard inner product on and
We consider the multiobjective programming problem with equilibrium constraints (P), as defined in Example 1 on . The feasible set F for the problem is
Let us consider the feasible point . Now, we have the following
Substituting for in the above equations, we obtain the following
Then, by choosing the following multipliers as , we can obtain the following
This shows that is an M-stationary point of (P). Further, the functions are all geodesic convex functions at and all the conditions of the sufficient optimality theorem (Theorem 5) are satisfied. Then, using Theorem 5, one can verify that is a weakly efficient solution of (P).
5. Applications
In this section, we illustrate the significance of our results in Euclidean spaces and in practical engineering problems.
If , then the results derived in the paper extend the corresponding results deduced by [35,40] for a more general class of optimization problems, namely, the multiobjective mathematical programming problems with equilibrium constraints (MMPEC). Moreover, if , then the results derived in this paper reduce to the corresponding results derived by Singh and Mishra [28]. Moreover, the results of this paper generalize some well-known corresponding results in Euclidean spaces; see, for instance, [19,23,41].
A very interesting category of problems that can be modelled in terms of (MPEC) is the design of multistage processes involving chemical equilibrium, as studied by Raghunathan and Biegler [22]. They showed that the phase identification problem can be modelled as a minimization problem of Gibbs free energy. Following the work of Raghunathan and Biegler [22], the design of the chemical equilibrium based processes can be modelled in the following manner:
subject to
subject to
where , , , and . In a chemical-equilibrium-based process design, the objective function corresponding to signifies the operating cost. The constraints corresponding to signify mass, component, energy balances and bounds on flow variables and temperatures. Problem deals with minimizing Gibbs free energy.
The usual procedure to solve these problems involves replacing () with its stationary conditions. By reformulating the problem () with the corresponding stationary conditions, we can arrive at a mathematical programming problem with equilibrium constraints. For more details, we refer to the paper by Raghunathan and Biegler [22].
There are several advantages of formulating such problems in science and engineering using the framework of manifolds. For instance, a complicated constrained mathematical programming problem can be reduced to a simpler unconstrained programming problem by making suitable use of the Riemannian geometry. Secondly, many non-convex optimization problems can be suitably transformed into a convex optimization problem by endowing the space with an appropriate Riemannian metric. For instance, following the work of Colao et al. [52], we consider the following problem:
where the feasible set is the positive orthant, defined as follows:
Colao et al. [52] considered that is a nonconvex function, defined as follows:
where and for every . That is, for every , and , we have the following:
where is the Dikin metric, as defined by Colao et al. [52]. It is a well-known fact that the feasible set , as defined above, endowed with the Dikin metric, is a Hadamard manifold. It was further verified in [52] that is geodesic convex function on the feasible set , with respect to the Dikin metric. As a result, the non-convex constrained optimization problem can be transformed into a convex unconstrained optimization problem by the appropriate use of the Dikin metric.
In light of the above discussions, it is evident that the results deduced in the paper can be applied to a very wide range of practical problems, which arise in several applications of science and engineering.
6. Conclusions and Future Directions
This paper is concerned with a class of multiobjective programming problems with equilibrium constraints on Hadamard manifolds (MMPEC). We introduced the generalized Guignard constraint qualification (GGCQ) on Hadamard manifold for our considered problem (MMPEC). By employing GGCQ, we derived the Karush–Kuhn–Tucker-type necessary optimality criteria for MMPEC. Further, we derived sufficient optimality criteria for (MMPEC) using geodesic convexity assumptions. An interesting application of mathematical programming problems with equilibrium constraints in the field of process engineering is provided, and the advantages of modelling such problems on manifolds is discussed. Several non-trivial examples have been cited in this paper to illustrate the significance of the derived results.
We have extended several of the well-known known results existing in the literature (for instance, [19,23,28,35,40,41,53]) from Euclidean spaces to a more general space, that is, Hadamard manifolds, and for a more general class of optimization problems, namely, mathematical programming problems with equilibrium constraints. To the best of our knowledge, the generalized Guignard constraint qualification and optimality conditions of (MMPEC) on Hadamard manifolds have been not been studied to date.
The sufficient optimality conditions derived in the paper could be further generalized by employing the notions of geodesic pseudoconvex and geodesic quasiconvex functions. Duality models for (MMPEC) have not been considered in the paper, and could be our future course of action. Another limitation of our work is that the results derived in the paper are restricted to the case when the objective and the constraint functions are smooth. The results presented in the paper can be further improved and extended to non-smooth multiobjective programming problems with equilibrium constraints on Hadamard manifolds by employing Mordukhovich limiting subdifferential, which has a better Lagrange multiplier rule compared to the Clarke subdifferential. We would like to address these in our next work.
Author Contributions
Conceptualization, S.T., B.B.U. and A.G.; Funding acquisition, K.N.; Investigation, B.B.U.; Methodology, A.G.; Supervision, S.T. All authors contributed equally to this article. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Fundamental Fund of Khon Kaen University, Thailand. The third author is supported by the Council of Scientific and Industrial Research, New Delhi, India, through grant number 09/1023(0044)/2021-EMR-I.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the anonymous referees for their careful reading of the paper and constructive suggestions, which have substantially improved the paper in its present form.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Boumal, N. An Introduction to Optimization on Smooth Manifolds; Cambridge University Press: Cambridge, UK, 2022. [Google Scholar]
- Hu, J.; Liu, X.; Wen, Z.W.; Yuan, Y.X. A brief introduction to manifold optimization. J. Oper. Res. Soc. China 2020, 8, 199–248. [Google Scholar] [CrossRef]
- Papa Quiroz, E.A.; Quispe, E.M.; Oliveira, P.R. Steepest descent method with a generalized Armijo search for quasiconvex functions on Riemannian manifolds. J. Math. Anal. Appl. 2008, 341, 467–477. [Google Scholar] [CrossRef]
- Papa Quiroz, E.A.; Oliveira, P.R. Proximal point methods for quasiconvex and convex functions with Bregman distances on Hadamard manifolds. J. Convex Anal. 2009, 16, 49–69. [Google Scholar]
- Rapcsák, T. Smooth Nonlinear Optimization in Rn; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Udrişte, C. Convex Functions and Optimization Methods on Riemannian Manifolds; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Bergmann, R.; Herzog, R. Intrinsic formulation of KKT conditions and constraint qualifications on smooth manifolds. SIAM J. Optim. 2019, 29, 2423–2444. [Google Scholar] [CrossRef]
- Borwein, J.; Lewis, A.S. Convex Analysis and Nonlinear Optimization: Theory and Examples; Springer Science & Business Media: New York, NY, USA, 2010. [Google Scholar]
- Boumal, N.; Mishra, B.; Absil, P.-A.; Sepulchre, R. Manopt, a matlab toolbox for optimization on manifolds. J. Mach. Learn. Res. 2014, 15, 1455–1459. [Google Scholar] [CrossRef]
- Ruiz-Garzón, G.; Osuna-Gómez, R.; Ruiz-Zapatero, J. Necessary and sufficient optimality conditions for vector equilibrium problems on Hadamard manifolds. Symmetry 2019, 11, 1037. [Google Scholar] [CrossRef]
- Li, C.; Mordukhovich, B.S.; Wang, J.; Yao, J.-C. Weak sharp minima on Riemannian manifolds. SIAM J. Optim. 2011, 21, 1523–1560. [Google Scholar] [CrossRef]
- Treanţă, S.; Mishra, P.; Upadhyay, B.B. Minty variational principle for nonsmooth interval-valued vector optimization problems on Hadamard manifolds. Mathematics 2022, 10, 523. [Google Scholar] [CrossRef]
- Ekeland, I. On the variational principle. J. Math. Anal. Appl. 1974, 47, 324–353. [Google Scholar] [CrossRef]
- Upadhyay, B.B.; Ghosh, A.; Mishra, P.; Treanţă, S. Optimality conditions and duality for multiobjective semi-infinite programming problems on Hadamard manifolds using generalized geodesic convexity. RAIRO Oper. Res. 2022, 56, 2037–2065. [Google Scholar] [CrossRef]
- Upadhyay, B.B.; Mishra, S.K.; Porwal, S.K. Explicitly geodesic B-preinvex functions on Riemannian manifolds. Trans. Math. Program. Appl. 2015, 2, 1–14. [Google Scholar]
- Upadhyay, B.B.; Treanţă, S.; Mishra, P. On Minty variational principle for nonsmooth multiobjective optimization problems on Hadamard manifolds. Optimization 2022. [Google Scholar] [CrossRef]
- Mishra, S.K.; Upadhyay, B.B. Pseudolinear Functions and Optimization; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Yang, W.H.; Zhang, L.-H.; Song, R. Optimality conditions for the nonlinear programming problems on Riemannian manifolds. Pac. J. Optim. 2014, 10, 415–434. [Google Scholar]
- Harker, P.T.; Pang, J.-S. Existence of optimal solutions to mathematical programs with equilibrium constraints. Oper. Res. Lett. 1988, 7, 61–64. [Google Scholar] [CrossRef]
- Britz, W.; Ferris, M.; Kuhn, A. Modeling water allocating institutions based on multiple optimization problems with equilibrium constraints. Environ. Model. Softw. 2013, 46, 196–207. [Google Scholar] [CrossRef]
- Ralph, D. Mathematical programs with complementarity constraints in traffic and telecommunications networks. Philos. Trans. R. Soc. A 2008, 366, 1973–1987. [Google Scholar] [CrossRef]
- Raghunathan, A.U.; Biegler, L.T. Mathematical programs with equilibrium constraints (MPECs) in process engineering. Comput. Chem. Eng. 2003, 27, 1381–1392. [Google Scholar] [CrossRef]
- Flegel, M.L.; Kanzow, C. On the Guignard constraint qualification for mathematical programs with equilibrium constraints. Optimization 2005, 54, 517–534. [Google Scholar] [CrossRef]
- Ahmadian, S.; Tang, X.; Malki, H.A.; Han, Z. Modelling cyber attacks on electricity market using mathematical programming with equilibrium constraints. IEEE Access 2019, 7, 27376–27388. [Google Scholar] [CrossRef]
- Mordukhovich, B. Multiobjective optimization problems with equilibrium constraints. Math. Program. 2009, 117, 331–354. [Google Scholar] [CrossRef][Green Version]
- Pandey, Y.; Mishra, S.K. On strong KKT type sufficient optimality conditions for nonsmooth multiobjective semi-infinite mathematical programming problems with equilibrium constraints. Oper. Res. Lett. 2016, 44, 148–151. [Google Scholar] [CrossRef]
- Pandey, Y.; Mishra, S.K. Optimality conditions and duality for semi-infinite mathematical programming problems with equilibrium constraints, using convexificators. Ann. Oper. Res. 2018, 269, 549–564. [Google Scholar] [CrossRef]
- Singh, K.V.K.; Mishra, S.K. On multiobjective mathematical programming problems with equilibrium constraints. Appl. Math. Inf. Sci. Lett. 2019, 7, 17–25. [Google Scholar] [CrossRef]
- Upadhyay, B.B.; Mohapatra, R.N. Sufficient optimality conditions and duality for mathematical programming problems with equilibrium constraints. Comm. Appl. Nonlinear Anal. 2018, 25, 68–84. [Google Scholar]
- Luo, Z.-Q.; Pang, J.-S.; Ralph, D. Mathematical Programs with Equilibrium Constraints; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar] [CrossRef]
- Fukushima, M.; Pang, J.-S. Some feasibility issues in mathematical programs with equilibrium constraints. SIAM J. Optim. 1998, 8, 673–681. [Google Scholar] [CrossRef]
- Outrata, J. Optimality conditions for a class of mathematical programs with equilibrium constraints. Math. Oper. Res. 1999, 24, 627–664. [Google Scholar] [CrossRef]
- Scheel, H.; Scholtes, S. Mathematical programs with complementarity constraints: Stationarity, optimality, and sensitivity. Math. Oper. Res. 2002, 25, 1–22. [Google Scholar] [CrossRef]
- Chen, Y.; Florian, M. The nonlinear bilevel programming problem: Formulations, regularity and optimality conditions. Optimization 1995, 32, 193–209. [Google Scholar] [CrossRef]
- Ye, J.J. Necessary and sufficient optimality conditions for mathematical programs with equilibrium constraints. J. Math. Anal. Appl. 2005, 307, 350–369. [Google Scholar] [CrossRef]
- Flegel, M.L.; Kanzow, C. Abadie-type constraint qualification for mathematical programs with equilibrium constraints. J. Optim. Theory Appl. 2005, 124, 595–614. [Google Scholar] [CrossRef]
- Sadeghi-Mobarakeh, A.; Mohsenian-Rad, H. Optimal Bidding in Performance-Based Regulation Markets: An MPEC Analysis With System Dynamics. IEEE Trans. Power Syst. 2017, 32, 1282–1292. [Google Scholar] [CrossRef]
- Wogrin, S.; Centeno, E.; Barquin, J. Generation Capacity Expansion in Liberalized Electricity Markets: A Stochastic MPEC Approach. IEEE Trans. Power Syst. 2011, 26, 2526–2532. [Google Scholar] [CrossRef]
- Li, R.; Wei, W.; Mei, S.; Hu, Q.; Wu, Q. Participation of an Energy Hub in Electricity and Heat Distribution Markets: An MPEC Approach. IEEE Trans. Smart Grid 2019, 10, 3641–3653. [Google Scholar] [CrossRef]
- Maeda, T. Constraint qualifications in multiobjective optimization problems: Differentiable case. J. Optim. Theory Appl. 1994, 80, 483–500. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Lin, G.H.; Yang, X. Constraint qualifications and proper Pareto optimality conditions for multiobjective problems with equilibrium constraints. J. Optim. Theory Appl. 2018, 176, 763–782. [Google Scholar] [CrossRef]
- Absil, P.-A.; Mahony, R.; Sepulchre, R. Optimization Algorithms on Matrix Manifolds; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Karkhaneei, M.M.; Mahdavi-Amiri, N. Nonconvex weak sharp minima on Riemannian manifolds. J. Optim. Theory Appl. 2019, 183, 85–104. [Google Scholar] [CrossRef]
- Lee, J.M. Introduction to Riemannian Manifolds; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Kumaresan, S. A Course in Differential Geometry and Lie Groups; Springer: Berlin/Heidelberg, Germany, 2002; Volume 22. [Google Scholar]
- Sakai, T. Riemannian Geometry; American Mathematical Society: Providence, RI, USA, 1996. [Google Scholar]
- Tang, G.; Huang, N. Korpelevich’s method for variational inequality problems on Hadamard manifolds. J. Glob. Optim. 2012, 54, 493–509. [Google Scholar] [CrossRef]
- Chen, S. Existence results for vector variational inequality problems on Hadamard manifolds. Optim. Lett. 2020, 14, 2395–2411. [Google Scholar] [CrossRef]
- Mangasarian, O.L. Nonlinear Programming; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Bento, G.C.; Melo, J.G. Subgradient method for convex feasibility on Riemannian manifolds. J. Optim. Theory Appl. 2012, 152, 773–785. [Google Scholar] [CrossRef]
- Papa Quiroz, E.A.; Oliveira, P.R. Full convergence of the proximal point method for quasiconvex functions on Hadamard manifolds. ESAIM Control Optim. Calc. Var. 2012, 18, 483–500. [Google Scholar] [CrossRef]
- Colao, V.; López, G.; Marino, G.; Martín-Márquez, V. Equilibrium problems in Hadamard manifolds. J. Math. Anal. Appl. 2012, 38, 61–77. [Google Scholar] [CrossRef]
- Egudo, R.R. Efficiency and generalized convex duality for multiobjective programs. J. Math. Anal. Appl. 1989, 138, 84–94. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).