Abstract
This paper investigates the stabilization for stochastic coupled Kuramoto oscillators (SCKOs) via nonlinear distributed feedback control. An original nonlinear distributed feedback control with the advantages of fast response, no steady-state deviation, and easy implementation is designed to stabilize SCKOs. With the help of the Lyapunov method and stochastic analysis skills, some novel sufficient conditions guaranteeing the stochastic stability for SCKOs are provided by constructing a new and suitable Lyapunov function for SCKOs. Finally, a numerical example is given to illustrate the effectiveness and applicability of the theoretical result.
Keywords:
stabilization; stochastic coupled Kuramoto oscillators; nonlinear distributed feedback control; Lyapunov method MSC:
05C81; 60H10
1. Introduction
In recent years, coupled systems have been extensively studied for their applications in physics, ecology, epidemiology, etc. [1,2,3,4,5,6,7,8,9,10,11,12]. In particular, coupled Kuramoto oscillators (CKOs) have received a lot of attention, and their dynamical properties have been investigated by many scholars [13,14,15,16]. In [14], researchers not only studied CKOs’ robustness, but also pointed out their research value in the field of deep brain stimulation in neurological diseases. In [15], a novel method of perceptual grouping model is proposed based on CKOs, which can dramatically improve the convergence speed, anti-noise ability and computing performance. So far, CKOs have been applied in various fields broadly, such as engineering, chemistry, biology and mathematics [17,18,19,20,21,22]. However, CKOs in the real world are always affected by environmental noise inevitably, which may change the dynamical properties of CKOs in general, and stochastic models are more consistent with the actual world relatively [2,23,24,25]. In some cases, the perturbation intensity to CKOs is linear; please see the literature [23,26]. As is known to all, in many practical situations, such as engineering, physics, mathematics and other fields, CKOs may also be influenced by nonlinear perturbations [27,28]. Consequently, it is necessary to consider stochastic coupled Kuramoto oscillators (SCKOs).
The practical application of SCKOs mainly depends on their dynamical properties, especially stability. Thus, how to analyze and control the stability of SCKOs is an important issue of concern to the scientific community. In this paper, we focus on the stochastic stability of SCKOs model with input control as follows.
where is the vibration frequency of oscillators in the absence of interaction, n is the number of the oscillators, and constant k represents the coupling strength. The phase of oscillator i is denoted as , which is a variable moving around the limit cycle and increasing with time. stands for the influence of oscillator j on oscillator i. We use for a control and for a one-dimensional Brownian motion. In addition, the perturbation intensity is represented by , and and are two positive constants.
As we all know, the Lyapunov method is one of the powerful methods to discuss system stability. However, it is very difficult to construct an appropriate Lyapunov function for system (1), because it is nonlinear and takes input control as well as random factors into account. Motivated by the above discussions and some studies in the literature [29,30], we aim to design the controller to ensure that system (1) satisfies the following two points:
Compared with the previous literature, our main contributions are as follows:
- A novel nonlinear distributed feedback control is designed to stabilize the SCKOs.
- By constructing a new Lyapunov function for SCKOs and applying some stochastic analysis skills, sufficient criteria for the stability of SCKOs which can be easily checked are obtained.
- A numerical simulation is performed to verify the effectiveness and applicability of our theoretical result.
The rest of this paper is organized below. Section 2 introduces the notations and preliminary knowledge. In Section 3, a new nonlinear distributed feedback control is designed, and some novel sufficient conditions are derived to determine the stability of SCKOs by the Lyapunov method and stochastic analysis skills. Section 4 presents an example and numerical simulation to verify the effectiveness and applicability of our theoretical result. Finally, some conclusions are given in Section 5.
2. Notations and Preliminary Knowledge
In this section, some notations which will be used later are introduced in Section 2.1. Some knowledge about stochastic analysis and the definition of stochastic stability are given in Section 2.2.
2.1. Notations
Throughout this paper, we use the following notations unless otherwise specified. Let be the set of real numbers, , , and be the n-dimensional Euclidean space. The and represent the maximum and the minimum of a and b, respectively. The indicator function of a set D is defined by
Denote the Euclidean norm for matrices by and write the transpose of vectors or matrices as superscript in the full text. Let represent the family of all real-valued functions defined on which are continuously twice differentiable in x and once differentiable in t. A function : is of class , if is continuous, strictly increasing and . A complete probability space is represented by , in which is a sample space, is a -field, satisfies the usual conditions, and is a probability measure. Let be an n-dimensional Brownian motion, which is defined on the probability space. The mathematical expectation with respect to the given probability measure is denoted by .
2.2. Preliminaries
In what follows, some prior knowledge about stochastic differential equations is presented, which can be found in [23]. Consider a general stochastic differential equation, which is described in the following form
where , and is an n-dimensional Brownian motion. In addition, functions are the drift coefficient as well as the diffusion coefficient, respectively. For any given , we define a differential operator as follows.
where
Definition 1
([23]). The trivial solution of system (1) is said to be stochastically stable if for any and , there exists a , such that
wherever .
3. Main Result
In this section, a nonlinear distributed feedback control is designed, and sufficient criteria for the stability of system (1) are obtained by constructing a suitable Lyapunov function and applying some stochastic analysis skills.
Theorem 1.
A nonlinear distributed feedback control
is designed, where is the vibration frequency of oscillators without interaction, and k denotes the coupling strength. The phase of oscillator i is represented by , which is a variable that moves around the limit cycle and increases over time. In addition, is the positive constant in the perturbation intensity . If , then system (1) has a unique global asymptotic stochastic stable trivial solution .
Proof.
For the aim of this paper, let
By the definition of operator , it follows that
We describe system (1) by a weighted directed digraph with vertices, where is a weight matrix which stands for the coupled strength of oscillators of system (1). Each vertex of the directed digraph denotes an oscillator of system (1), and the directed arcs represent the inter-connections and interactions among vertex systems.
Let , where is the cofactor of the i-th principal diagonal element of the Laplace matrix
of weight matrix A. In addition, using inequality (4) and combinatorial identity (see Theorem 2.2 in [31]), we can derive that
where is the set of all spanning unicyclic graphs, denotes the weight of , is the directed cycle of , and is a set of arcs leading from initial vertex s to terminal vertex r. For more detailed knowledge of graph theory, readers can refer to the following studies [32,33]. Furthermore, by applying the definition of and Equation (3), we can immediately obtain that
in which . Moreover, let and . From the continuity of and , we learn that there exists a , such that
in which . Then, we can easily see that . Note , and assume that . According to the Itô’s formula, it is not hard to deduce that when ,
Then, it derives that
For simplicity, we write that when ,
Therefore,
To here, we have obtained that
Let . Thus, it obviously follows that
From what has been discussed above, it is straightforward to show that
In other words, system (1) is stochastically stable, which means that the proof is complete. □
Remark 1.
In recent years, many researchers have used feedback control to study the stability of a system; see for example [34,35,36,37]. A novel nonlinear distributed feedback control is proposed to stabilize system (1). Compared with general feedback control, the new nonlinear feedback control has a faster response because it is a distributed control. Furthermore, the proposed controller causes no deviation of oscillators’ vibration frequency in steady state, so it is unnecessary to introduce an integral term to eliminate the deviation. Hence, the controller for system (1) is easy to design. To summarize, the controller that we design has the advantage of quick response, no steady-state error and being easy to implement.
Remark 2.
In fact, by a sign function, the designed controller can perform power instruction via making a comparison with instantaneous frequency and the given equilibrium frequency. The designed nonlinear distributed feedback control can be regarded as a sliding mode control. Here, has a variable structure, which always changes purposefully based on the current state of the system. This forces the system to slide into a predetermined state trajectory such that the state of Kuramoto oscillators converges to an equilibrium point.
Remark 3.
It is very difficult to find a suitable Lyapunov function for system (1) due to its complex structure. From the proof of Theorem 1, the Lyapunov function for system (1) is constructed as . It is easy to see that depends on not only the coupling strength between the individual oscillators but also on the topological structure of system (1). Therefore, finding is the key in the study of stabilization for system (1). The problem is solved successfully by constructing
4. Numerical Simulation
In order to illustrate the effectiveness of the theoretical result, a numerical simulation is given in this section. For system (1), we suppose . Other corresponding parameters are listed in Table 1.

Table 1.
Corresponding parameters of system (1).
Choose . Let the values of and be the same as shown in Table 1. Obviously, we have for i = 1, 2, . Thus, the values of all the parameters we set satisfy the condition of Theorem 1. According to Theorem 1, system (1) has a unique global stochastic stable trivial solution .
In addition, we choose the initial phase position as . The sample path of system (1) is described in Figure 1.
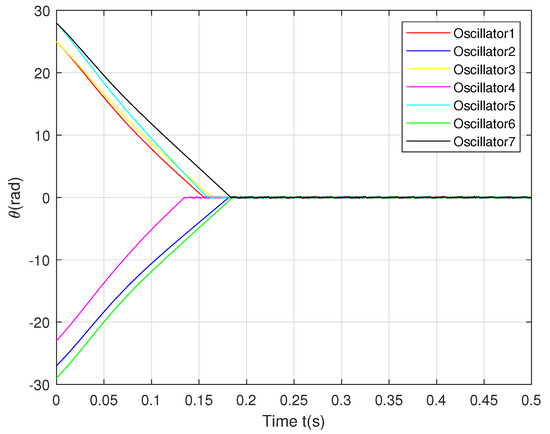
Figure 1.
The sample path of the solution to system (1).
From Figure 1, it is easy to find that the solution of system (1) is stochastically stable. Hence, the simulation result confirms the effectiveness of our theoretical result.
Remark 4.
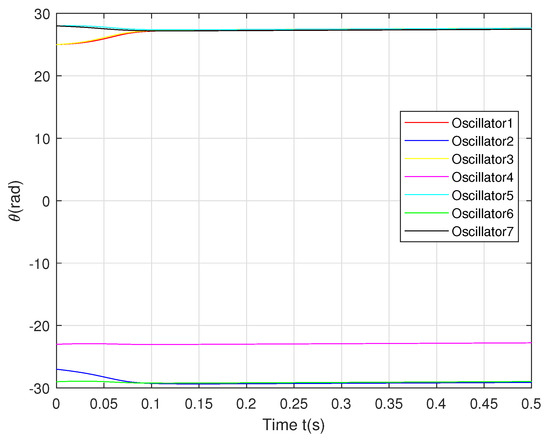
Stability is a quite important characteristic of system (1). Only under the premise of maintaining stability can system (1) work normally and meet the requirements of other performance indicators. From Figure 1, we can easily find that system (1) is stable, which is largely due to the controller we have designed. For readers to understand and convince, as a comparison, we remove the controller and the stochastic perturbation to confirm that the robustness of our designed controller is excellent. According to the idea of control variables, the values of all relevant parameters are still the same as those in Table 1 above, and the selection of the initial phase position is also the same. Then, we give the numerical simulation result, which is shown in Figure 2. From Figure 2, we can clearly see that the system is not stable, and it may even generate chaos in some cases.
Figure 2.
The trajectory of the solution to system (1) without the controller and the stochastic perturbation.
5. Conclusions
In this paper, we have discussed the stabilization of SCKOs by designing a novel nonlinear distributed feedback control successfully, which can guarantee that system (1) has a stable equilibrium solution . In view of the Lyapunov method, some original sufficient criteria have been obtained. A numerical simulation has also been given to verify the applicability and effectiveness of our theoretical result. In fact, our approach can also be applied to explore the stabilization for SCKOs perturbed by some other types of noises, such as SCKOs with Markovian switching and SCKOs with Lévy noise. We will be committed to solving these problems by using our approach in the future.
Author Contributions
Conceptualization, S.G. and R.K.; Methodology, S.G. and R.K.; Software, S.G.; Validation, S.G. and R.K.; Formal analysis, R.K.; Writing—original draft preparation, S.G. and R.K.; Writing—review and editing, R.K.; Visualization, R.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Fundamental Research Funds for the Central Universities (No. 2572022BC04).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
This work was supported by the Fundamental Research Funds for the Central Universities (No. 2572022BC04). The authors sincerely thank anonymous referees for their valuable comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CKOs | Coupled Kuramoto oscillators |
| SCKOs | Stochastic coupled Kuramoto oscillators |
References
- Yang, X.; Song, Q.; Cao, J.; Lu, J. Synchronization of Coupled Markovian Reaction-Diffusion Neural Networks with Proportional Delays Via Quantized Control. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 951–958. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Wu, B. On input-to-state stability for stochastic coupled control systems on networks. Appl. Math. Comput. 2015, 262, 90–101. [Google Scholar]
- El-Sayed, A.M.A.; Fouad, H.A. On a Coupled System of Stochastic Itô’s-Differential and the Arbitrary (Fractional) Order Differential Equations with Nonlocal Random and Stochastic Integral Conditions. Mathematics 2021, 9, 2571. [Google Scholar] [CrossRef]
- Zada, A.; Fatima, S.; Ali, Z.; Xu, J.; Cui, Y. Stability Results for a Coupled System of Impulsive Fractional Differential Equations. Mathematics 2019, 7, 927. [Google Scholar] [CrossRef]
- Lou, S.; Hu, X.; Zhao, L.; Li, S. Event-triggered neural adaptive backstepping control of the K chaotic PMSGs coupled system. Int. J. Electr. Power Energy Syst. 2022, 135, 107475. [Google Scholar]
- Wu, Y.; Wang, C.; Li, W. Generalized quantized intermittent control with adaptive strategy on finite-time synchronization of delayed coupled systems and applications. Nonlinear Dyn. 2019, 95, 1361–1377. [Google Scholar] [CrossRef]
- Rao, S.C.S.; Chaturvedi, A.K.; Su, H. Analysis and implementation of a computational technique for a coupled system of two singularly perturbed parabolic semilinear—Diffusion equations having discontinuous source terms. Nonlinear Anal.-Hybrid Syst. 2022, 108, 106232. [Google Scholar] [CrossRef]
- Wang, M.; Li, W. Stability of random impulsive coupled systems on networks with Markovian switching. Stoch. Anal. Appl. 2019, 37, 1107–1132. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, W.; Ding, X. Input-to-state stability for stochastic multi-group models with multi-dispersal and time-varying delay. Appl. Math. Comput. 2019, 343, 114–127. [Google Scholar] [CrossRef]
- Li, S.; Lv, C.; Ding, X. Synchronization of stochastic hybrid coupled systems with multi-weights and mixed delays via aperiodically adaptive intermittent control. Nonlinear Anal.-Hybrid Syst. 2020, 35, 100819. [Google Scholar] [CrossRef]
- Gao, S.; Guo, H.; Chen, T. The existence of periodic solutions for discrete-time coupled systems on networks with time-varying delay. Physics A 2019, 526, 120876. [Google Scholar] [CrossRef]
- Fabien, K.; Martine, L.W.; Hervé, S.; Adoum, D.A.; Pierre, M.A.N.; Mahamat, B.; Sévérin, N. Effects of damping on the dynamics of an electromechanical system consisting of mechanical network of discontinuous coupled system oscillators with irrational nonlinearities: Application to sand sieves. Chaos Solitons Fractals 2022, 156, 111805. [Google Scholar]
- Li, W.; Wang, S.; Su, H.; Wang, K. Global exponential stability for stochastic networks of coupled oscillators with variable delay. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 877–888. [Google Scholar] [CrossRef]
- Franci, A.; Chaillet, A. Existence and robustness of phase-locking in coupled Kuramoto oscillators under mean-field feedback. Automatica 2011, 47, 1193–1202. [Google Scholar] [CrossRef]
- Meier, M.; Haschke, R.; Ritter, H.J. Perceptual grouping through competition in coupled oscillator networks. Neurocomputing 2014, 141, 76–83. [Google Scholar] [CrossRef][Green Version]
- Umberto, B.; Enrique, Z. A stochastic approach to the synchronization of coupled oscillators. Front. Energy Res. 2020, 8, 115. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Synchronization in complex networks of phase oscillators: A survey. Automatica 2014, 50, 1539–1564. [Google Scholar]
- Ross, A.; Kyrychko, S.N.; Blyuss, K.B.; Kyrychko, Y.N. Dynamics of coupled Kuramoto oscillators with distributed delays. Chaos 2021, 31, 103107. [Google Scholar] [CrossRef]
- Dénes, K.; Sándor, B.; Néda, Z. Pattern selection in a ring of Kuramoto oscillators. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104868. [Google Scholar] [CrossRef]
- Jaćimović, V. Computing the Douady–Earle extension using Kuramoto oscillators. IEEE Trans. Power Syst. 2019, 9, 523–529. [Google Scholar] [CrossRef]
- Chen, S.H.; Hsia, C.H.; Shiue, M.C. On mathematical analysis of synchronization to bidirectionally coupled Kuramoto oscillators. Nonlinear Anal. Real World Appl. 2020, 56, 103169. [Google Scholar] [CrossRef]
- Markdahl, J.; Thunberg, J.; Goncalves, J. High-dimensional Kuramoto models on Stiefel manifolds synchronize complex networks almost globally. Automatica 2020, 113, 108736. [Google Scholar] [CrossRef]
- Mao, X. Stochastic Differential Equations and Applications; Horwood Publishing: Chichester, UK, 1997. [Google Scholar]
- Guo, Y.; Liu, Y.; Xu, Y. Synchronized stationary distribution of stochastic coupled systems based on graph theory. Math. Meth. Appl. Sci. 2019, 42, 4444–4455. [Google Scholar] [CrossRef]
- Zou, X.; Zheng, Y.; Zhang, L.; Lv, J. Survivability and stochastic bifurcations for a stochastic Holling type II predator-prey model. Commun. Nonlinear Sci. Numer. Simul. 2020, 83, 105136. [Google Scholar] [CrossRef]
- Rafail, K. Stochastic Stability of Differential Equations; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Wang, C.; Zhou, X.; Shi, X.; Jin, Y. Robust control for uncertain variable fractional order differential systems considering time-varying delays and nonlinear perturbations. Optim. Control Appl. Methods 2022, 43, 979–993. [Google Scholar] [CrossRef]
- Aghayan, Z.S.; Alfi, A.; Tenreiro Machado, J.A. Guaranteed cost-based feedback control design for fractional-order neutral systems with input-delayed and nonlinear perturbations. ISA Trans. 2022, in press. [CrossRef]
- Fabien, K.; Pierre, M.A.N.; Eric, D.D.; Fabien, B.E.; Blaise, N.B.; Michael, S.T.O.; Hervé, S.; Alain, S.T.K.; Martine, L.W.; Emmanuel, E.; et al. Effects of time delay on the dynamics of nonlinear beam on elastic foundation under harmonic moving load: Chaotic detection and its control. J. Vib. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Fabien, K.; Jean, A.M.; Pierre, M.A.N.; Hervé, S.; Eric-Donald, D.; Timothé, T.O.E.; Hatou-Yvelin, D.; Fabien, B.E. Statistical approach of modulational instability in the class of nonlocal NLS equation involving nonlinear Kerr-like responses with non-locality: Exact and approximated solutions. Wave Motion 2022, 113, 102997. [Google Scholar]
- Li, M.; Shuai, Z. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef]
- West, D.B. Introduction to Graph Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Trudeau, R. Introduction to Graph Theory; Courier Dover Publications: New York, NY, USA, 2013. [Google Scholar]
- Fabien, K.; Michael, S.T.O.; Hervé, S.; Alain, S.T.K.; Blaise, N.B.; Martine, L.W.; Emmanuel, E.; François, N. Effects of time delay on the dynamical behavior of nonlinear beam on elastic foundation under periodic loadings: Chaotic detection and it control. Results Phys. 2022, 35, 105305. [Google Scholar]
- Zhang, H.; Xia, J.; Zhuang, G.; Shen, H. Robust interval stability/stabilization and H∞ feedback control for uncertain stochastic Markovian jump systems based on the linear operator. Sci. China Inf. Sci. 2022, 65, 142202. [Google Scholar] [CrossRef]
- Wang, T.; Cheng, R.; Wu, Y. Stability analysis of heterogeneous traffic flow influenced by memory feedback control signal. Appl. Math. Model. 2022, 109, 693–708. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Anderson, D.R. On stability and feedback control of discrete fractional order singular systems with multiple time-varying delays. Chaos Solitons Fractals 2022, 155, 111740. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).