
A Roadside Unit Deployment Optimization Algorithm for Vehicles Serving as Obstacles


Abstract
:1. Introduction
2. Related Work
3. Relevant Models and Problem Formulation
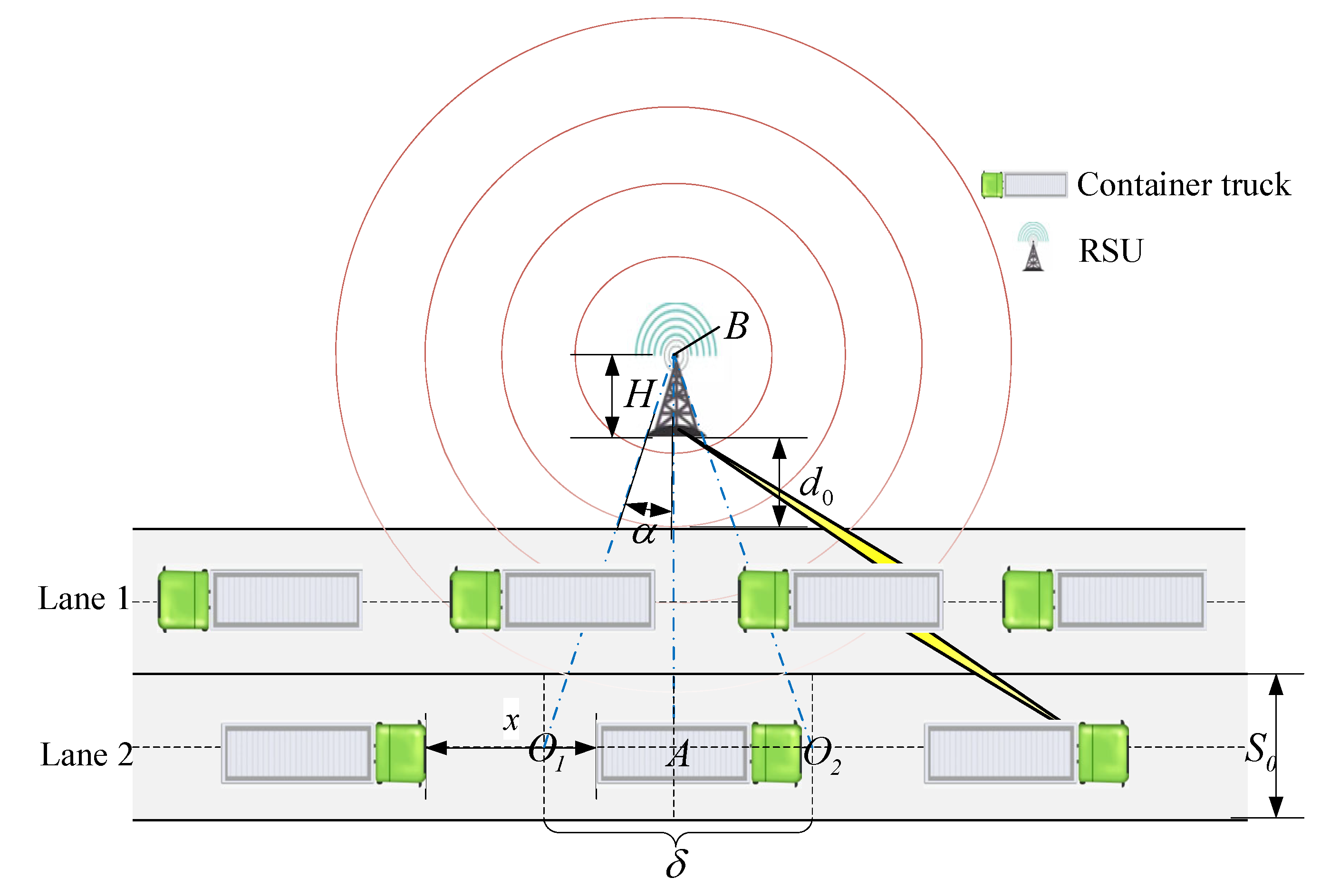
3.1. The Traffic Flow Model
3.2. Channel Model
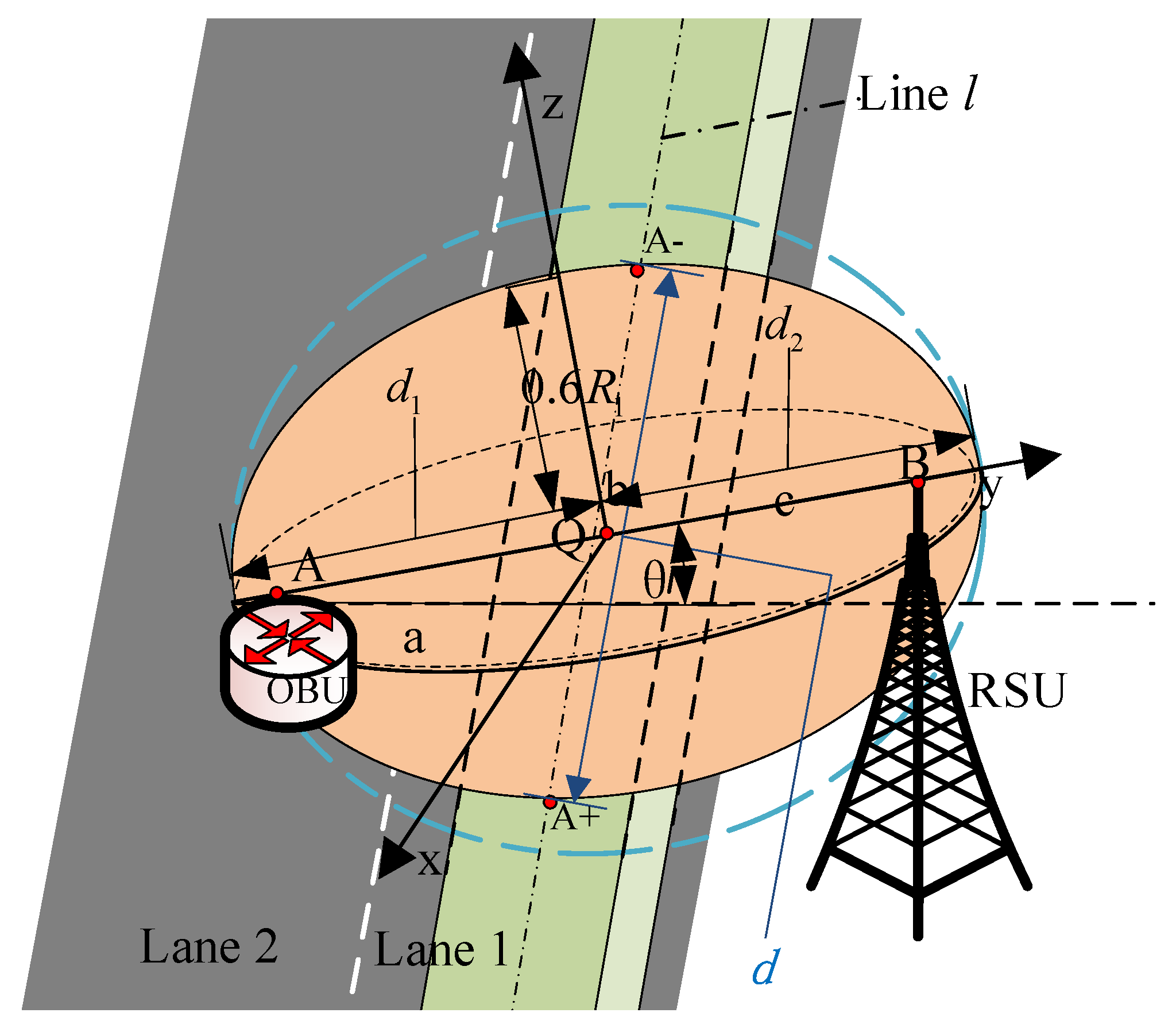
3.2.1. Preliminary Statements
3.2.2. Probability of LOS and NLOS
3.2.3. Path Loss under LOS and NLOS Conditions
3.2.4. Angular Range for Successful Transmission of Signal Packets
3.3. Discretization Method and Error Analysis of Coverage Area
3.4. Problem Formulation
3.5. Hardness Analysis
4. Solutions
4.1. Search Domain Adjustment-Neighborhood Ranking
4.2. Greedy Heuristic Solution
| Algorithm 1 GH algorithm |
| Input: CPs, Z Output: The deployment set W of RSUs 1: Calculate R; 2: Sort all CPs in descending order according to the number of CPs within the neighborhood ranking domain; 3: for i = 1: do 4: Find uncovered CPs; 5: for j = 1: 6: select a candidate RSU location r∈ that maximizes ; 7: W←W∪{r}; 8: end for 9: end for 10: return W |
4.3. Improved Artificial Bee Colony Algorithm based on the Neighborhood Ranking Solution
| Algorithm 2 NR-IABC algorithm |
| Input: CPs, Z Output: The deployment set W of RSUs 1: Calculate R; 2: Sort all CPs in descending order according to the number of CPs within the neighborhood ranking domain; 3: for i = 1: do 4: Find uncovered CPs; 5: While the number of iterations Ite≤MaxIt do 6: Randomly generated initial solution with Equation (46); 7: Update with constructed by Equation (43), otherwise the ith element of trail + 1; 8: with Equation (35); 9: ; 10: if 11: with constructed by Equation (44) and the ith element of trail set to 0, otherwise the ith element of trail + 1; 12: end if 13: if TR > limit 14: Update TR with a new solution generated by the scouting bee with Equation (46) and the ith element of trail set to 0; 15: end if 16: Update the worst solution with constructed by Equation (45) and the ith element of trail set to 0; 17: Ite = Ite + 1; 18: Update all ; 19: W←W∪}; 20: end while 21: end for 22: return W |
5. Numerical Results
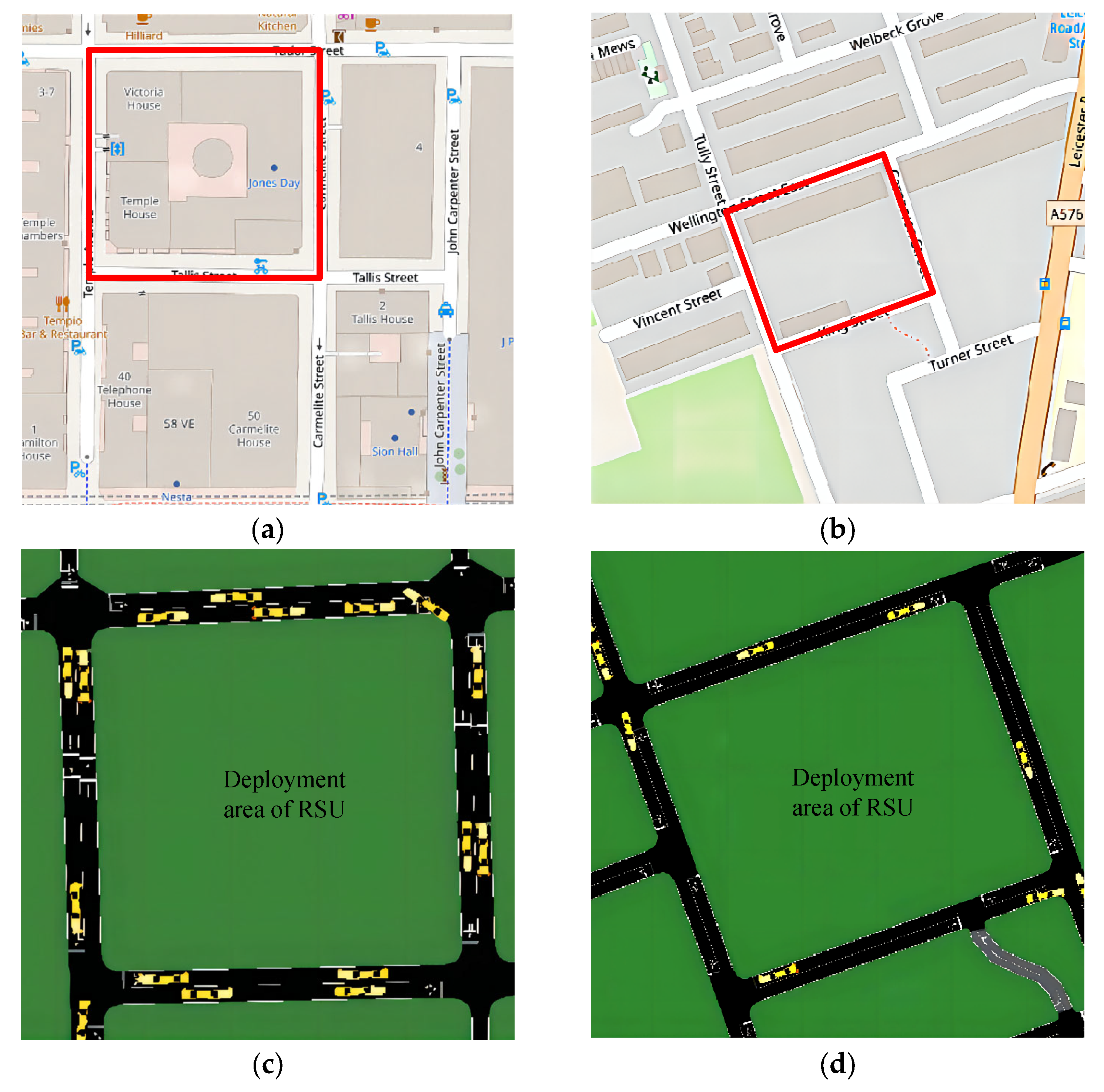
5.1. Simulation Settings
5.2. Numerical Results
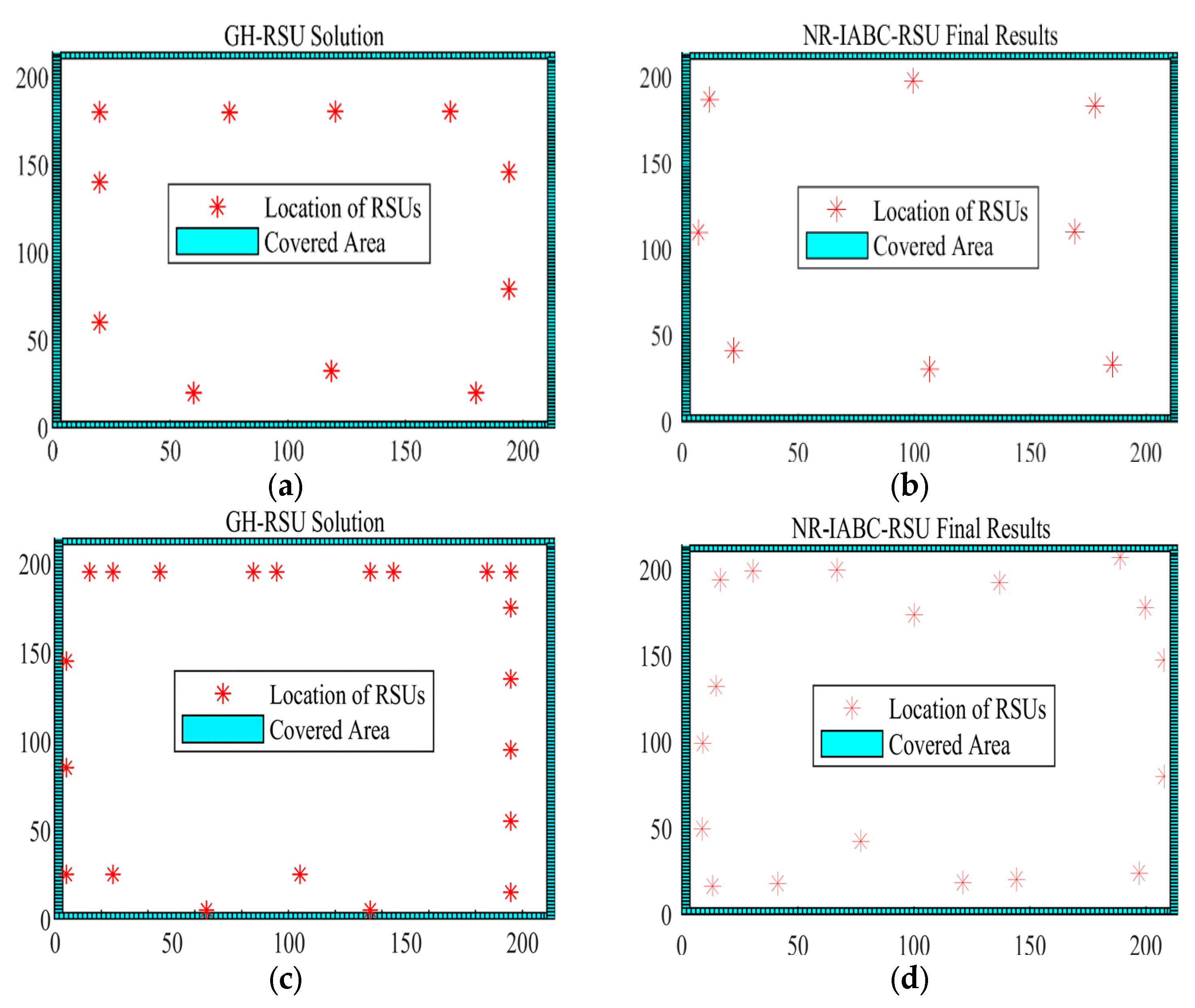
5.2.1. An Illustration of Deployment Results
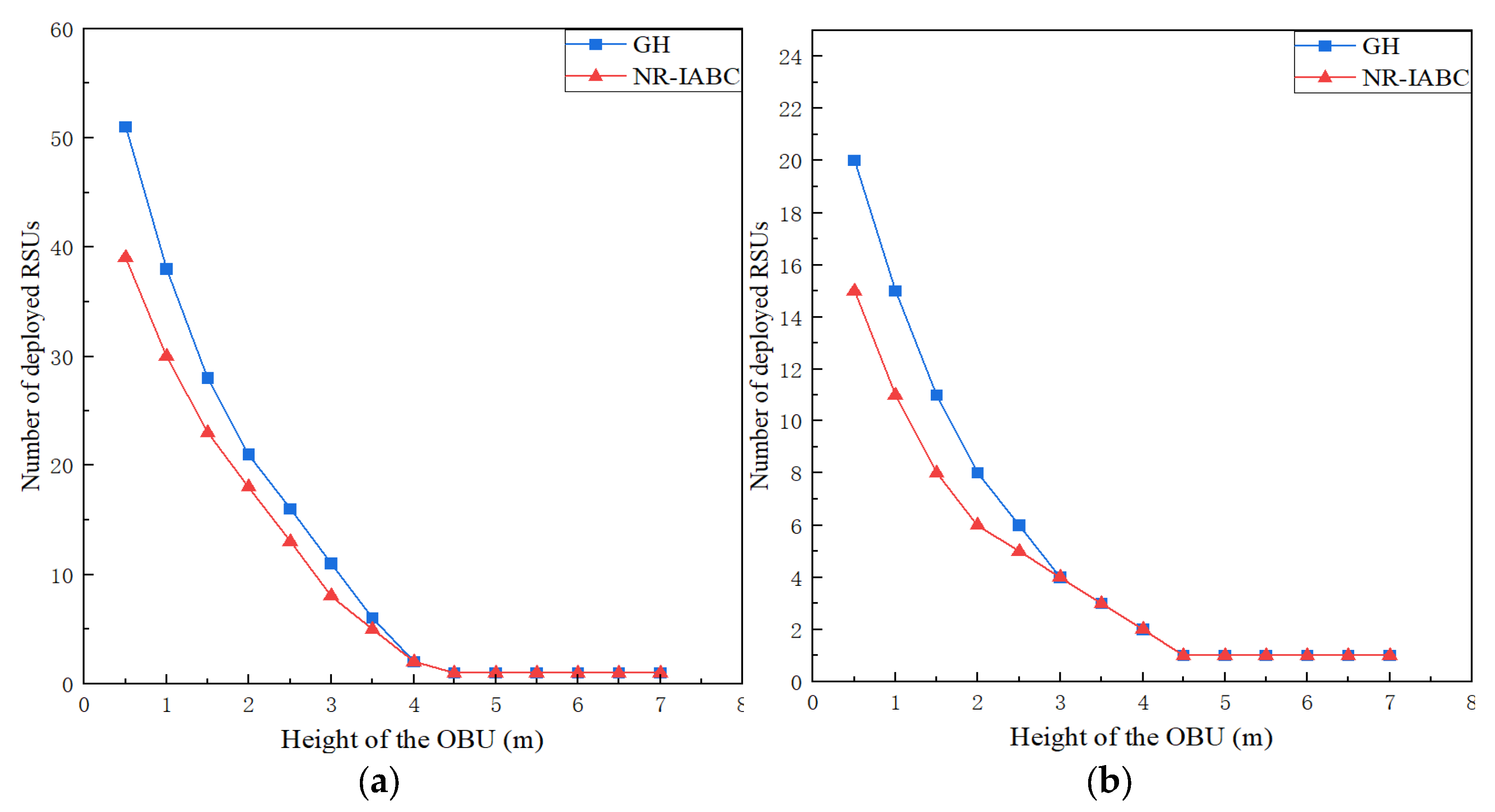
5.2.2. The Impact of Antenna Height
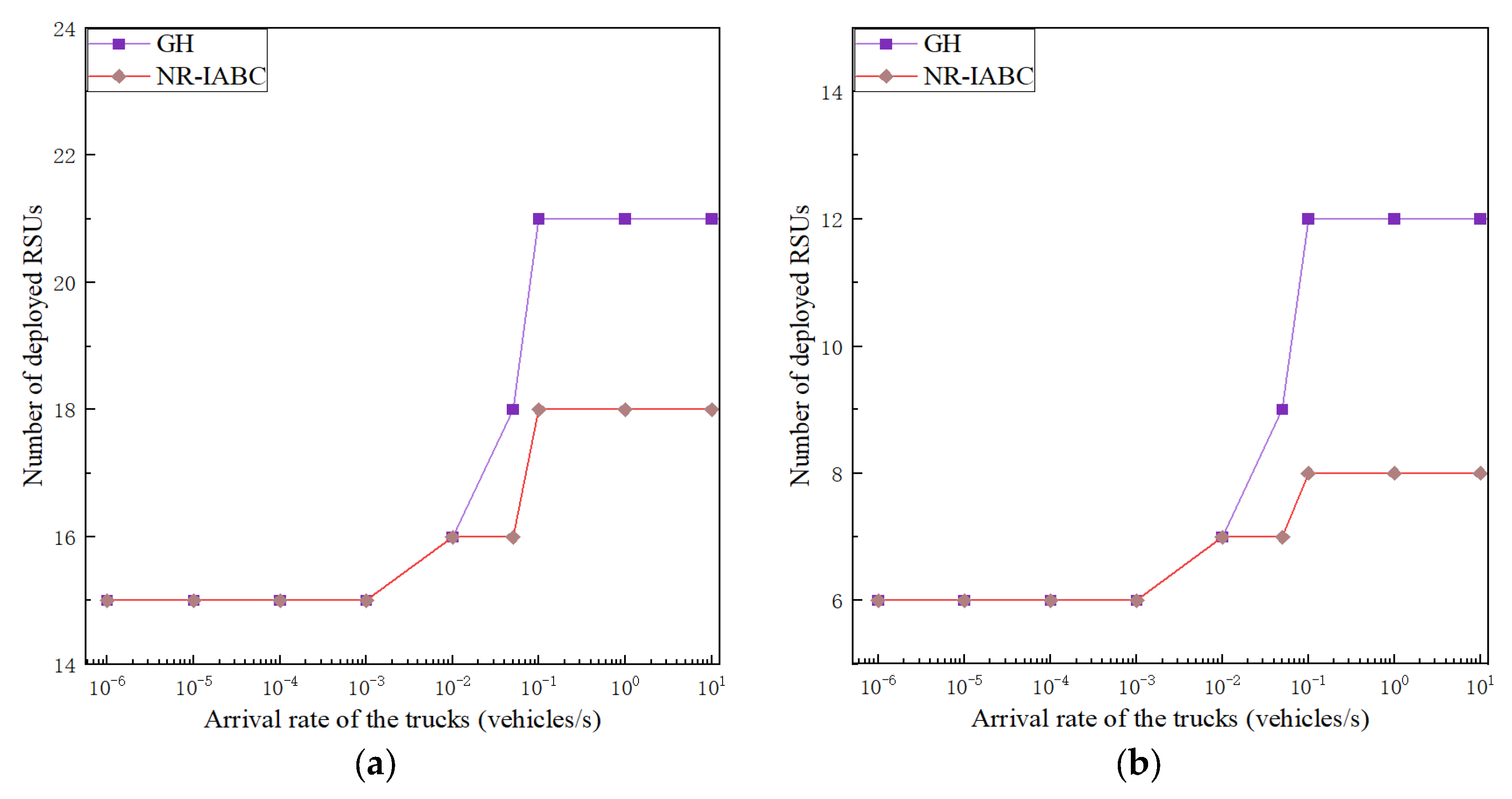
5.2.3. The Impact of Traffic Density
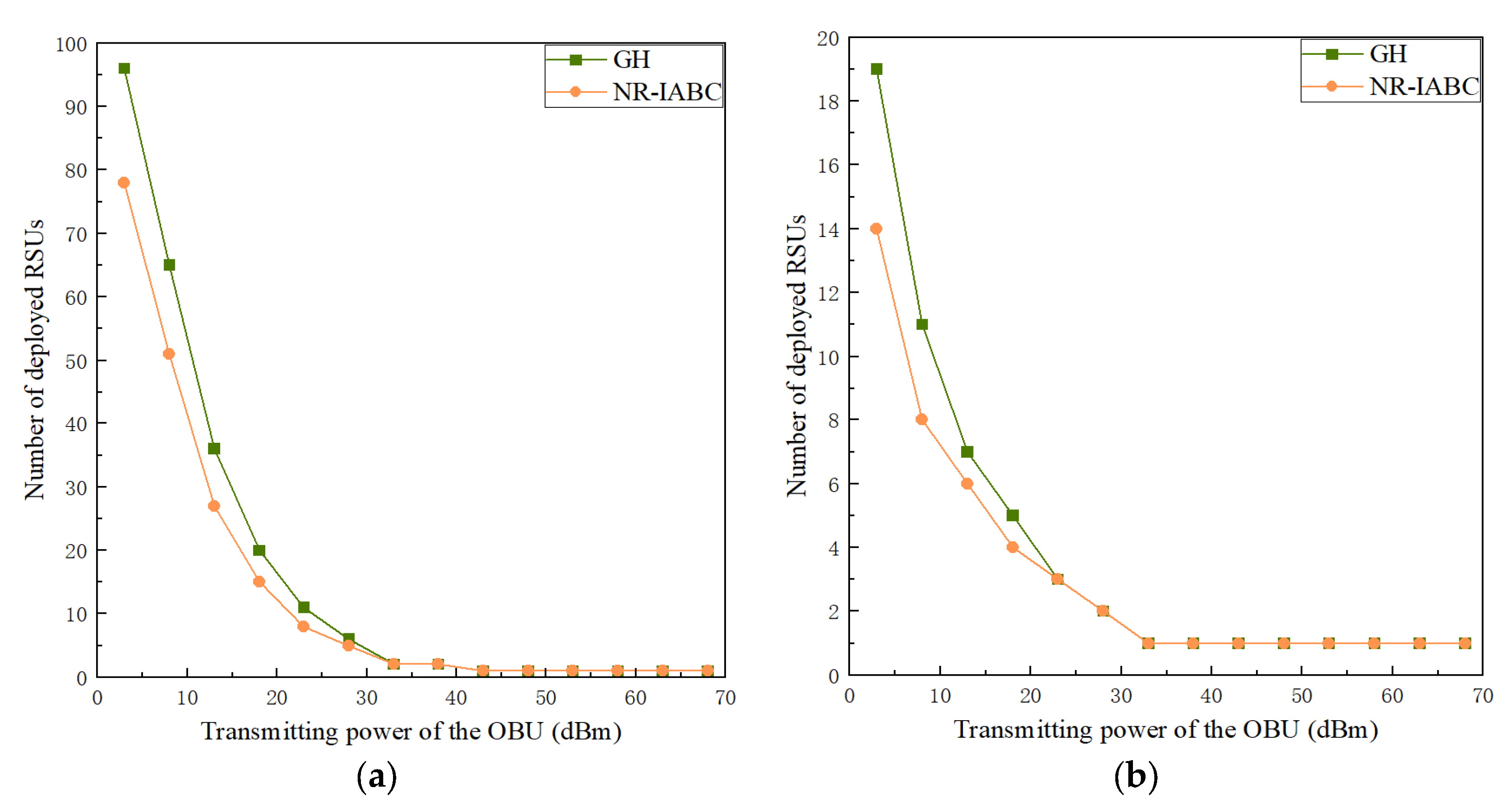
5.2.4. The Impact of Transmitting Power
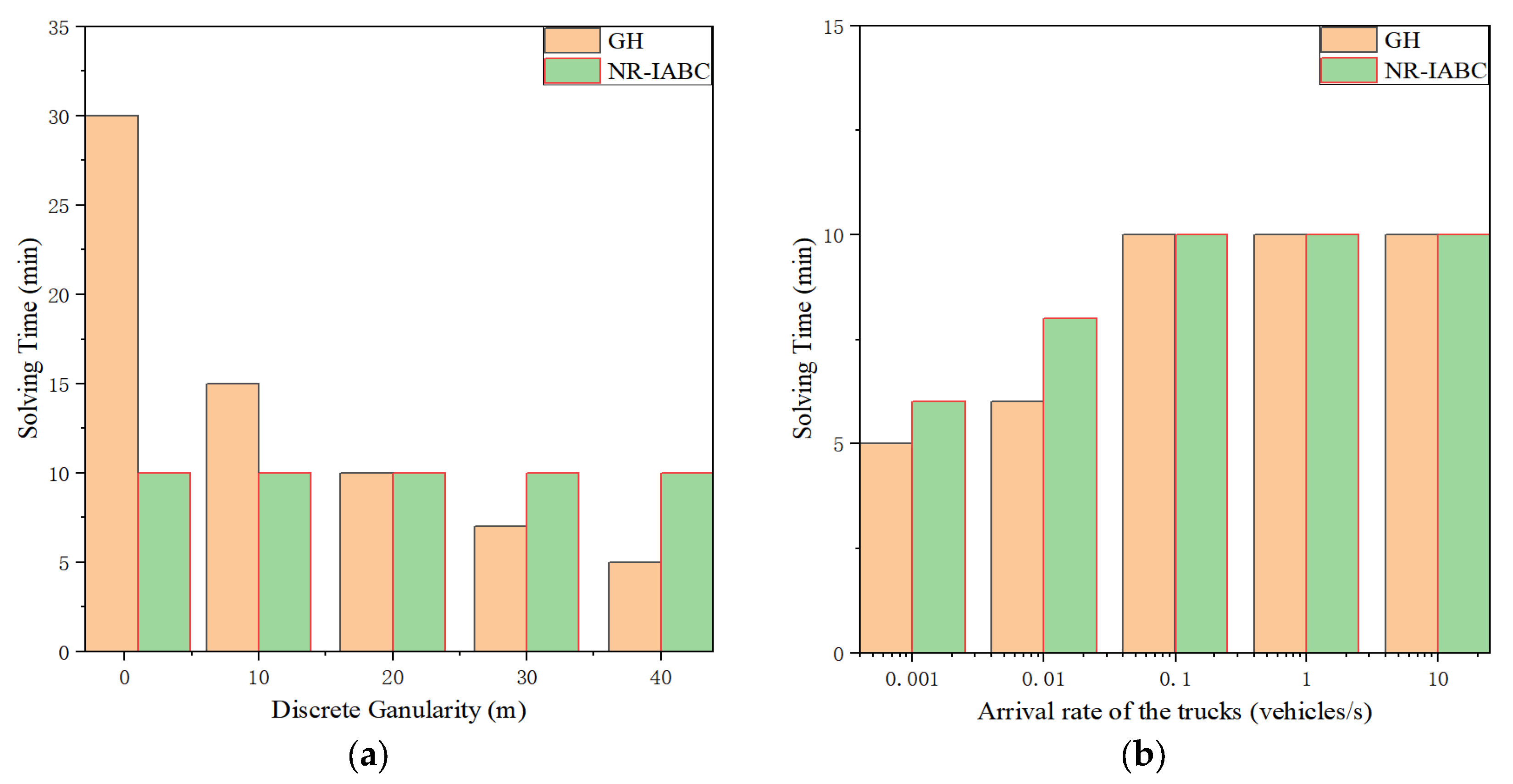
5.2.5. The Efficiency of Two Algorithms
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mahmood, D.A.; Horváth, G. Analysis of the Message Propagation Speed in VANET with Disconnected RSUs. Mathematics 2020, 8, 782. [Google Scholar] [CrossRef]
- Zhou, H.B.; Xu, W.C.; Chen, J.C.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Quy, V.K.; Nam, V.H.; Linh, D.M.; Ban, N.T.; Han, N.D. Communication Solutions for Vehicle Ad-hoc Network in Smart Cities Environment: A Comprehensive Survey. Wirel. Pers. Commun. 2022, 122, 2791–2815. [Google Scholar] [CrossRef]
- Alheeti, K.; Alaloosy, A.; Khalaf, H.; Alzahrani, A.; Al_Dosary, D. An Optimal Distribution of RSU for Improving Self-Driving Vehicle Connectivity. Comput. Mater. Contin. 2022, 70, 3311–3319. [Google Scholar] [CrossRef]
- Maglogiannis, V.; Naudts, D.; Hadiwardoyo, S.; van den Akker, D.; Marquez-Barja, J.; Moerman, I. Experimental V2X Evaluation for C-V2X and ITS-G5 Technologies in a Real-Life Highway Environment. IEEE Trans. Netw. Serv. Manag. 2022, 19, 1521–1538. [Google Scholar] [CrossRef]
- Ahmed, Z.; Naz, S.; Ahmed, J. Minimizing transmission delays in vehicular ad hoc networks by optimized placement of road-side unit. Wirel. Networks 2020, 26, 2905–2914. [Google Scholar] [CrossRef]
- Gao, Z.G.; Wu, H.-C.; Cai, S.B.; Tan, G.Z. Tight Approximation Ratios of Two Greedy Algorithms for Optimal RSU Deployment in One-Dimensional VANETs. IEEE Trans. Veh. Technol. 2021, 70, 3–17. [Google Scholar] [CrossRef]
- Yu, H.Y.; Liu, R.K.; Li, Z.H.; Ren, Y.L.; Jiang, H. An RSU Deployment Strategy Based on Traffic Demand in Vehicular Ad Hoc Networks (VANETs). IEEE Internet Things J. 2022, 9, 6496–6505. [Google Scholar] [CrossRef]
- Shi, Y.J.; Lv, L.L.; Yu, H.; Yu, L.J.; Zhang, Z.H. A Center-Rule-Based Neighborhood Search Algorithm for Roadside Units Deployment in Emergency Scenarios. Mathematics 2020, 8, 1734. [Google Scholar] [CrossRef]
- Ghorai, C.; Banerjee, I. A constrained Delaunay Triangulation based RSUs deployment strategy to cover a convex region with obstacles for maximizing communications probability between V2I. Veh. Commun. 2018, 13, 89–103. [Google Scholar] [CrossRef]
- Boban, M.; Barros, J.; Tonguz, O.K. Geometry-Based Vehicle-to-Vehicle Channel Modeling for Large-Scale Simulation. IEEE Trans. Veh. Technol. 2014, 63, 4146–4164. [Google Scholar] [CrossRef]
- Boban, M.; Vinhoza, T.T.V.; Ferreira, M.; Barros, J.; Tonguz, O.K. Impact of Vehicles as Obstacles in Vehicular Ad Hoc Networks. IEEE J. Sel. Areas Commun. 2011, 29, 15–28. [Google Scholar] [CrossRef]
- Anbalagan, S.; Bashir, A.K.; Raja, G.; Dhanasekaran, P.; Vijayaraghavan, G.; Tariq, U.; Guizani, M. Machine-Learning-Based Efficient and Secure RSU Placement Mechanism for Software-Defined-IoV. IEEE Internet Things J. 2021, 8, 13950–13957. [Google Scholar] [CrossRef]
- Liang, Y.Y.; Ma, N.; Li, X.; Hu, J. Stochastic Roadside Unit Location Optimization for Information Propagation in the Internet of Vehicles. IEEE Internet Things J. 2021, 8, 13316–13327. [Google Scholar] [CrossRef]
- Selvakumari, P.; Sheela, D.; Chinnasamy, A. Chew’s Second Delaunay Triangulation Refinement Scheme for Optimal RSUs Deployment to Ensure Maximum Connectivity in Vehicle to Infrastructure Communication. Wirel. Pers. Commun. 2022, 123, 375–405. [Google Scholar] [CrossRef]
- Guerna, A.; Bitam, S.; Calafate, C.T. AC-RDV: A novel ant colony system for roadside units deployment in vehicular ad hoc networks. Peer-to-Peer Netw. Appl. 2021, 14, 627–643. [Google Scholar] [CrossRef]
- Lytaev, M.; Borisov, E.; Vladyko, A. V2I Propagation Loss Predictions in Simplified Urban Environment: A Two-Way Parabolic Equation Approach. Electronics 2020, 9, 2011. [Google Scholar] [CrossRef]
- Li, W.; Hu, X.Y.; Gao, J.; Zhao, L.; Jiang, T. Measurements and Analysis of Propagation Channels in Vehicle-to-Infrastructure Scenarios. IEEE Trans. Veh. Technol. 2020, 69, 3550–3561. [Google Scholar] [CrossRef]
- Kim, H.K.; Becerra, R.; Bolufé, S.; Azurdia-Meza, C.A.; Montejo-Sánchez, S.; Zabala-Blanco, D. Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections. Sensors 2021, 21, 2956. [Google Scholar] [CrossRef]
- Eshteiwi, K.; Kaddoum, G.; Selim, B.; Gagnon, F. Impact of Co-Channel Interference and Vehicles as Obstacles on Full-Duplex V2V Cooperative Wireless Network. IEEE Trans. Veh. Technol. 2020, 69, 7503–7517. [Google Scholar] [CrossRef]
- Hoque, M.A.; Rios-Torres, J.; Arvin, R.; Khattak, A.; Ahmed, S. The extent of reliability for vehicle-to-vehicle communication in safety critical applications: An experimental study. J. Intell. Transp. Syst. 2020, 24, 264–278. [Google Scholar] [CrossRef]
- He, R.S.; Molisch, A.F.; Tufvesson, F.; Zhong, Z.D.; Ai, B.; Zhang, T.T. Vehicle-to-Vehicle Propagation Models with Large Vehicle Obstructions. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2237–2248. [Google Scholar] [CrossRef]
- Abbas, T.; Sjöberg, K.; Karedal, J.; Tufvesson, F. A Measurement Based Shadow Fading Model for Vehicle-to-Vehicle Network Simulations. Int. J. Antennas Propag. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Yang, L.; Wang, Y.B.; Yao, Z.H. A New Vehicle Arrival Prediction Model for Adaptive Signal Control in a Connected Vehicle Environment. IEEE Access 2020, 8, 112104–112112. [Google Scholar] [CrossRef]
- Hmamouche, Y.; Benjillali, M.; Saoudi, S. Fresnel Line-of-Sight Probability with Applications in Airborne Platform-Assisted Communications. IEEE Trans. Veh. Technol. 2022, 71, 5060–5072. [Google Scholar] [CrossRef]
- Braga, A.D.; Da Cruz, H.A.O.; Eras, L.E.C.; Araujo, J.P.L.; Neto, M.C.A.; Silva, D.K.N.; Cavalcante, G.P.S. Radio Propagation Models Based on Machine Learning Using Geometric Parameters for a Mixed City-River Path. IEEE Access 2020, 8, 146395–146407. [Google Scholar] [CrossRef]
- Lopez-Benitez, M.; Zhang, J.Y. Comments and Corrections to “New Results on the Fluctuating Two-Ray Model with Arbitrary Fading Parameters and Its Applications”. IEEE Trans. Veh. Technol. 2021, 70, 1938–1940. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Al-Absi, A.A.; Lee, H.J. Varied density of vehicles under city, highway and rural environments in V2V communication. Int. J. Sens. Networks 2020, 33, 148–158. [Google Scholar] [CrossRef]
- Gao, Z.G.; Chen, D.J.; Cai, S.B.; Wu, H.-C. Optimal and Greedy Algorithms for the One-Dimensional RSU Deployment Problem with New Model. IEEE Trans. Veh. Technol. 2018, 67, 7643–7657. [Google Scholar] [CrossRef]
- Yao, H.Q.; Zheng, C.Q.; Fu, X.W.; Yang, Y.S.; Ungurean, I. Charger and receiver deployment with delay constraint in mobile wireless rechargeable sensor networks. Ad Hoc Netw. 2022, 126, 102756. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.J.; Xiao, S.Y.; Cui, Z.H.; Xu, M.Y.; Zhou, X.Y. Improving artificial Bee colony algorithm using a new neighborhood selection mechanism. Inf. Sci. 2020, 527, 227–240. [Google Scholar] [CrossRef]
- Saeed, M.H.; Wang, F.Z.; Salem, S.; Khan, Y.A.; Kalwar, B.A.; Fars, A. Two-stage intelligent planning with improved artificial bee colony algorithm for a microgrid by considering the uncertainty of renewable sources. Energy Rep. 2021, 7, 8912–8928. [Google Scholar] [CrossRef]
- Lin, P.; Wang, A.M.; Zhang, L.; Wu, J.; Sun, G.; Liu, L.L.; Lu, L. An improved cuckoo search with reverse learning and invasive weed operators for suppressing sidelobe level of antenna arrays. Int. J. Numer. Model. Electron. Netw. Devices Fields 2021, 34, e2829. [Google Scholar] [CrossRef]
- Road Traffic Statistics. Available online: https://roadtraffic.dft.gov.uk/downloads (accessed on 20 August 2022).
- Product Brochure of the Automotive Module (C-V2X AG15). Available online: https://www.quectel.com/product/c-v2x-ag15 (accessed on 20 August 2022).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| l | The length of the container truck |
| w | The width of the container truck |
| h | The height of the container truck |
| H | The height of the top of the RSU from the ground |
| The height of the antenna of the OBU from the ground | |
| The width of the road | |
| γ | The arrival rate of container trucks |
| λ | Wavelength |
| f | Frequency |
| τ | A minimum sensitivity threshold of the received signal |
| The transmitting power of the OBU | |
| The received power of the RSU | |
| Variables | Description |
| A continuous variable. The distance from the bottom of the RSU to the curb | |
| α | A continuous variable. The angle between AB and A’B |
| θ | A continuous variable. The elevation angle between the antenna of the OBU and the top of the RSU |
| A continuous variable. The attenuation due to diffraction | |
| A continuous variable. The attenuation under the free-space path loss condition | |
| A continuous variable. The total attenuation under the NLOS condition | |
| A continuous variable. The total attenuation under the LOS condition | |
| A continuous variable. The probability of the NLOS condition | |
| A continuous variable. The probability of the LOS condition | |
| A continuous variable. Whether the signal packet is transmitted successfully under the NLOS condition | |
| A continuous variable. Whether the signal packet is transmitted successfully under the LOS condition | |
| A continuous variable. The probability of successful signal packet transmission |
| Parameters | Values |
|---|---|
| l | 8.5 (m) |
| w | 2.5 (m) |
| h | 4 (m) |
| H | 5.5 (m) |
| 0.5~7 (m) | |
| 3.5 (m) | |
| γ | (vehicles/s) |
| λ | 0.05 (m) |
| f | 5.9 (GHz) |
| τ | −80 (dBm) |
| 3~68 (dBm) | |
| L | 200 (m) |
| MaxIt | 20 |
| nPop | 40 |
| K | 126 |
| ε | 15 |
| σ | 90% |
| δ | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, M.; Yao, H.; Ungurean, I. A Roadside Unit Deployment Optimization Algorithm for Vehicles Serving as Obstacles. Mathematics 2022, 10, 3282. https://doi.org/10.3390/math10183282
Feng M, Yao H, Ungurean I. A Roadside Unit Deployment Optimization Algorithm for Vehicles Serving as Obstacles. Mathematics. 2022; 10(18):3282. https://doi.org/10.3390/math10183282
Chicago/Turabian StyleFeng, Mingwei, Haiqing Yao, and Ioan Ungurean. 2022. "A Roadside Unit Deployment Optimization Algorithm for Vehicles Serving as Obstacles" Mathematics 10, no. 18: 3282. https://doi.org/10.3390/math10183282
APA StyleFeng, M., Yao, H., & Ungurean, I. (2022). A Roadside Unit Deployment Optimization Algorithm for Vehicles Serving as Obstacles. Mathematics, 10(18), 3282. https://doi.org/10.3390/math10183282