Abstract
This paper studies the problem of the finite-time control of the blood gases system, presented as a T-S fuzzy model with bounded disturbance during extracorporeal circulation. The aim was to design an observer-based fuzzy controller to ensure that the closed-loop system was finite-time bounded with the performance. Firstly, different from the existing results, the T-S fuzzy model of a blood gas control system was developed and a new method was given to process the time derivatives of the membership functions. Secondly, based on the fuzzy Lyapunov function, sufficient conditions for the finite-time boundedness of the system were obtained by using Finsler’s lemma and matrix decoupling techniques. Simulation results are provided to demonstrate the effectiveness of the proposed methodology.
Keywords:
observer-based fuzzy controller; fuzzy Lyapunov function; T-S fuzzy model; finite-time boundedness MSC:
93C10; 93C42; 93B36; 92C50
1. Introduction
Extracorporeal circulation (ECC), mainly consisting of an artificial heart, artificial lungs, thermostats, pipelines, filters, consoles, and electronic instruments, is an important technique in clinical medicine. It is receiving more attention, especially pertaining to major vascular surgery and life support for patients with heart failure, e.g., regarding blood utilization or artificial heart control [1,2,3,4]. In some results, i.e., robust control [5] and finite-time control [6], factors in the blood gas control (BGC) system, such as the flow rate and arterial partial pressure, should be controlled in a finite-time interval, and the transient performance of the system needs to be guaranteed, otherwise, it might cause metabolic alkalosis or acidosis for the patient, or even endanger the patient’s life. Hence, how to control the flow rate and arterial partial pressure of blood gases is an issue. Due to external and internal influences, the BGC during the ECC process, which contains nonlinearity, is complicated. For convenience, the linear state-space model of the BGC system in [5] was given by using standard linearization methods. Although it unavoidably led to larger deviations for the BGC system with nonlinearity, this model—as a research basis—could be improved further by considering the R-C circuit under pulsed operation. To our knowledge, the T-S fuzzy model, since it has better approximation properties, consists of a set of linear models and membership functions (MFs) and can represent a nonlinear system, such as a stochastic system [7] or the inverted pendulum system [8]. In addition, the type-2 fuzzy model [9] is more complex than T-S, and can deal with uncertainty and disturbance. Therefore, it is worthy to consider establishing a T-S fuzzy model of the BGC system.
On the one hand, the analysis and synthesis of the fuzzy system have been diffusely investigated, such as stability analysis, controller design [10,11,12,13], filter design [14,15,16], observer design [17,18,19], etc. Most of the improved methods to reduce conservatism generally focus on designing Lyapunov functions (LFs), analyzing MFs, and introducing slack variables. For nonlinear complex systems, non-quadratic LFs (NQLFs) in [20] (also called fuzzy LFs, multiple fuzzy sums) were designed to overcome the shortcoming of quadratic LFs. Significantly, the derivatives of NQLFs normally include the derivatives of MFs to be dealt with. Some conditions restricting time derivatives of MFs were provided in [21,22,23,24]. On the other hand, different from asymptotic stability based on the Lyapunov stability theory, other concepts, such as finite-time stability (FTS) [25] and finite-time boundedness (FTB) [26,27], were introduced to study the dynamic characteristics of linear and nonlinear systems in finite-time intervals. Moreover, the results on finite-time control were further improved in [28,29,30,31] and the references therein. In recent decades, although the notion of FTB has been extended to various fields, there are few works about FTB in the BGC system. For instance, the resilient controller in [6] was designed to maintain the levels of blood gases. The finite-time contractive boundedness was proposed in [32] by designing a non-fragile controller. Therefore, it is worth noting that the FTB has good application prospects in the BGC system, combined with the fuzzy control theory.
Inspired by the above discussions, in this paper, we designed an observer-based fuzzy controller for the BGC system via the T-S fuzzy model, such that the closed-loop system is FTB. The contributions of this paper are listed as follows:
- •
- The T-S fuzzy model of the blood gas control system, different from the existing results [5,6,32], was built by using the local approximation approach; an observer-based state feedback controller (depending on MFs) was designed.
- •
- A new method, different from [33], which reduces the redundant restrictive conditions, is proposed in the form of LMIs (to deal with the time derivatives of MFs).
- •
- Based on non-quadratic LFs, new sufficient conditions for the FTB of the system were obtained by using the Finsler lemma and matrix decoupling techniques, which include some existing results in [6] as a special case.
Notation: is the transpose of H, the sign , , . ’*’ in the matrix indicates the transpose of its symmetric term.
2. Preliminaries
2.1. The T-S Fuzzy Model of the BGC System
Based on the complex BGC system shown in [5], the flow rates of gases (O2 and CO2) and their arterial partial pressures are considered.
The actual control flow is illustrated in Figure 1, where the control inputs are the flow rates of O2 and CO2, and the arterial partial pressure is the measured output . Since there are always uncertainties, such as artificial disturbances, the changes in patient physiology, considering the nonlinear BGC system, are as follows:
where , and are the actual system state, actual control input, measured output, and disturbances, respectively.
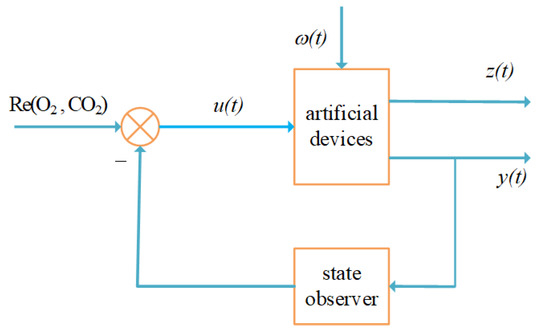
Figure 1.
Block diagram.
Based on the linear model shown in [5], we established the T-S fuzzy model of the BGC system (1) by applying the local approximation method in [34] as follows:
where , , , , , , , including the flow rates of O2 and CO2 and their arterial partial pressure; , including the commanded flow rates of O2 and CO2; , is the controlled output; is the external bounded disturbance satisfying , for the given actual time , and is the normalized MF satisfying the convex sum properties , .
Different from [35], we designed a fuzzy full-dimensional state observer as follows:
where , , and are the observer and controller gains to be designed, and
For the sake of brevity, the following parts ignore the time symbol t.
Remark 1.
Effectively, due to physical and external influence, it is reasonable to bound the states in the BGC system. Therefore, the BGC system is signified by the T-S fuzzy model, which is valid in region . Similarly, the estimations of the system states need to be bounded.
Definition 1.
Ref. [27]: the system (4) is FTB with respect to , where , and , if satisfy and
Definition 2.
The aim of this paper was to design and , guaranteeing that system (4) is FTB and the performance is guaranteed for .
2.2. Properties
Property 1.
Ref. [36]: There exists and matrices X, , , and , if
then,
Property 2.
Ref. [37]: given matrices with suitable dimensions, then, holds if
Property 3.
Ref. [8]: If matrices M, N, and have proper dimensions, then,
3. Main Results
Different from [35], we designed the fuzzy Lyapunov function
Then, we have
and
where .
Remark 2.
Owing to , depending on state x, if depends on all elements of the state, then ϵ is the unit matrix. If depends on the partial state, for example, depends only on , then .
Based on [33], considering ; that is,
Proof.
Write (10) simply as
where , , .
Expression (12) is equivalent to
By Property 3, there exists a positive definite matrix , such that (13) is deduced by
Given , , , then
Let , by the Schur complement, (17) is equivalent to
By Property 1, (21) is guaranteed by
Remark 3.
To reduce the conservatism, Ref. [33] introduced many unknown parameters to be searched, but it is time-consuming. This paper reduces the introduction of parameters by applying the equivalence transformation.
Theorem 1.
The BGC system (4) is FTB with respect to under the observer-based fuzzy controller (3) if given matrix and positive scalars g, , σ, , , α, , , a, there exist matrices , , , , , () and , , , such that the LMIs (11) with () and (23), (24) hold
where
, , , , , , .
Proof.
Let , then is ensured by
where .
For convenience, considering matrices , , , , , , , then , , , , and .
By the Schur complement, (25) is equivalent to
where .
Due to , there exits a symmetric matrix with proper dimensions, and , such that
Owing to , then
.
Given , then . So (34) implies
(23) guarantees
Therefore, by Definition 1, system (4) is FTB.
On the other hand, under , both sides of are multiplied by and integrated from 0 to to have
Due to and , then , from (38) we have
Thus, by Definition 2, the BGC system (4) is FTB. □
Remark 4.
To obtain and easily solve LMI conditions, Ref. [18] designed the LF matrices with diagonal structures (which might lead to conservatism). However, this paper rids itself of this restriction.
Remark 5.
Based on the linearized state-space model in [6], if Theorem 1 is adapted to , , , , , the results of Corollary 1 in [6] will be obtained. Therefore, Theorem 1 contains Corollary 1 in [6] as a special case.
4. Simulation Example
Based on the reasonable nominal data in [38], by using the local approximation method of fuzzy control, we consider (2) with
, ,
, , , .
Given , , , . Considering , , then , , thus . The external disturbance of the system is represented by sine waves, as shown in Figure 2. In order to obtain the dynamic output response of the system under different disturbances, two different disturbance signals, shown in Figure 3, were added; the corresponding responses are shown in Figure 4, from which it can be seen that the performance of the system is still guaranteed under different disturbances. In Theorem 1, we give , , , , , , , and .
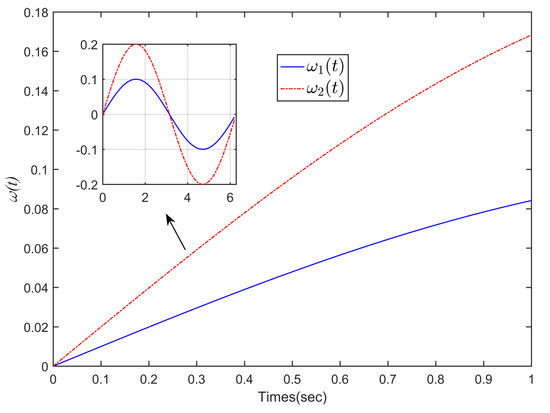
Figure 2.
External disturbance .
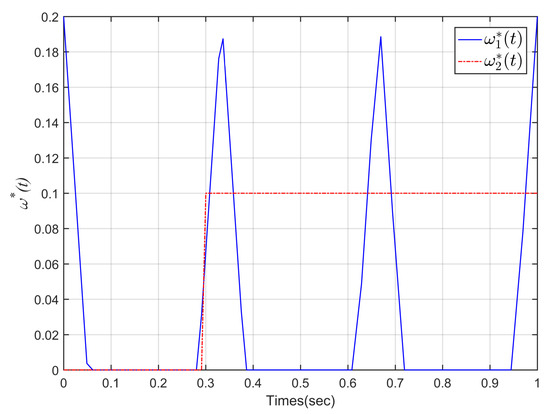
Figure 3.
Two different disturbances .
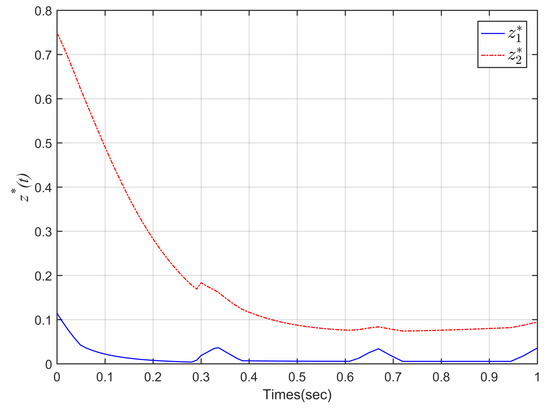
Figure 4.
Output response for .
Considering , it can be seen that decreases as m increases in Figure 5. However, when m increases to a certain value, hardly decreases, which demonstrates the rejection of the designed method to changes in the parameters of the system.
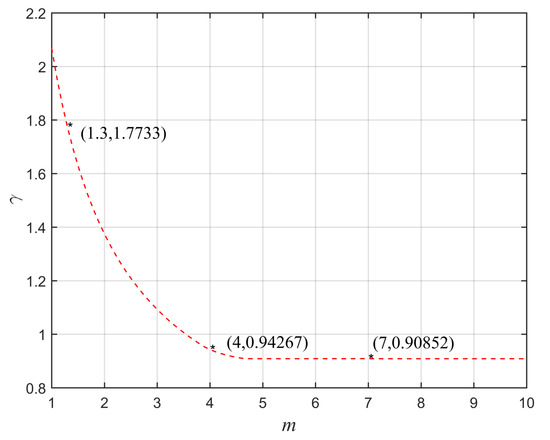
Figure 5.
Changing relationship between and m.
When , we have ; the observer gains and controller gains are as follows
, , , , , , ,
.
Under the fuzzy controller (3) with the above observer gains and controller gains, Figure 6 illustrates the flow rates of O2 and CO2 in the BGC system and the values observed by the observer. The arterial partial pressures of O2 and CO2 and their observed values are illustrated in Figure 7. The command input is drawn in Figure 8 and the controlled output is drawn in Figure 9. The responses over a time interval of under different initial conditions are illustrated in Figure 10, which proves the system is FTB.
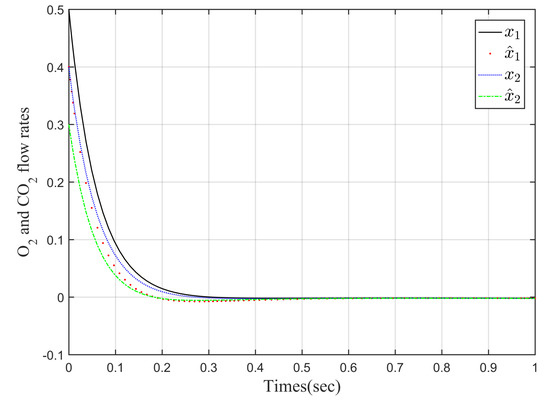
Figure 6.
and and their estimations.
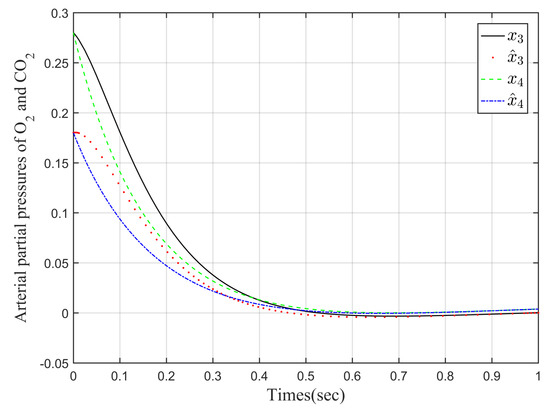
Figure 7.
and and their estimations.
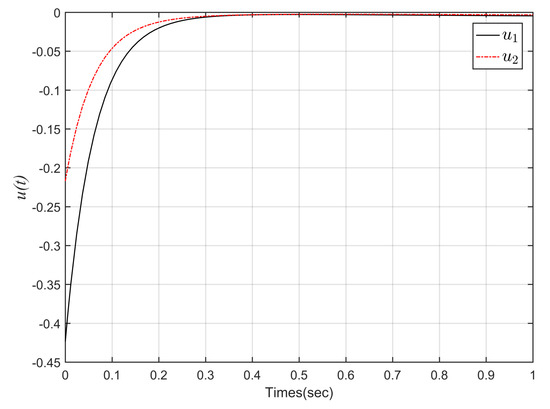
Figure 8.
Commanded Input.
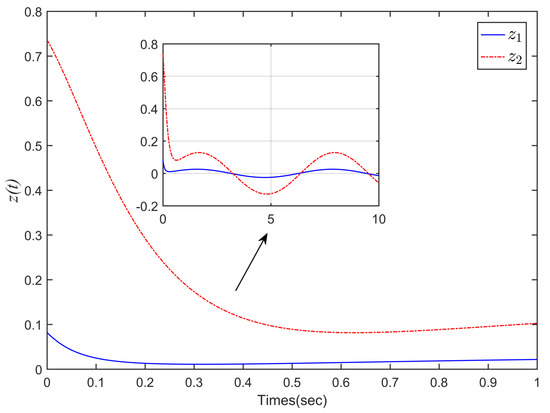
Figure 9.
Controlled Output.
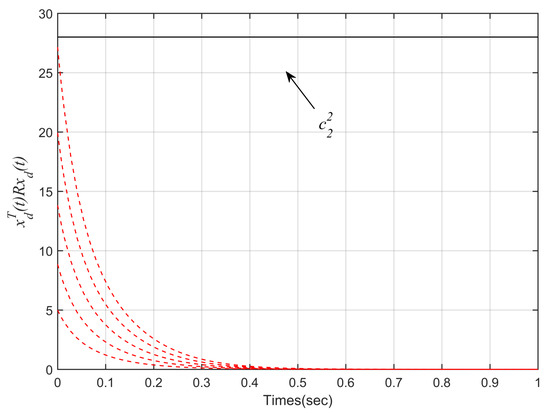
Figure 10.
Responses of under different initial conditions.
5. Conclusions
This paper studies the finite time control of the BGC system. By the local approximation method, the T-S fuzzy model was established and an observer-based fuzzy controller was designed. An LMI-based new method was given to bound the derivatives of MFs and sufficient conditions for the FTB of the system were obtained. Finally, the simulation results show the effectiveness of the designed method.
Author Contributions
Formal analysis, Z.Y., Z.Z. and G.H.; methodology, Z.Y., G.H. and B.Z.; funding acquisition, Z.Y.; investigation, software, and writing—original draft preparation and editing, Z.Z.; review and editing, Z.Y. and G.H. All authors have read and agreed to the published version of the manuscript.
Funding
This paper was supported in part by the National Natural Science Foundation of China (under grant nos. 61877062, 61977043) and the Natural Science Foundation of Shandong Province (ZR2020QF051).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Butch, S.H.; Knafl, P.; Oberman, H.A.; Bartlett, R.H. Blood utilization in adult patients undergoing extracorporeal membrane oxygenated therapy. Transfusion 1996, 36, 61–63. [Google Scholar] [CrossRef] [PubMed]
- Bakouri, M.; Alassaf, A.; Alshareef, K.; Abdelsalam, S.; Ismail, H.F.; Ganoun, A.; Alomari, A.H. An optimal H∞ controller for left ventricular assist devices based on a starling-like controller: A simulation study. Mathematics 2022, 10, 731. [Google Scholar] [CrossRef]
- Yu, Y.C.; Boston, J.R.; Simaan, M.A.; Antaki, J.F. Estimation of systemic vascular bed parameters for artificial heart control. IEEE Trans. Autom. Control 1998, 43, 765–778. [Google Scholar] [CrossRef]
- Campos, F.; Sobrino, T.; Blanco, M.; López Arias, E.; Baluja, A.; Álvarez, J.; Castillo, J. Glutamate neurotoxicity is involved in the neurological damage in patients undergoing extracorporeal circulation. Int. J. Cardiol. 2014, 172, 481–483. [Google Scholar] [CrossRef] [PubMed]
- Mahmoud, M.S. Robust control of blood gases during extracorporeal circulation. IET Control. Theory Appl. 2011, 5, 1577–1585. [Google Scholar] [CrossRef]
- Sakthivel, R.; Joby, M.; Kwon, O. Observer-based resilient finite-time control of blood gases model during extra-corporeal circulation. IET Syst. Biol. 2018, 12, 131–137. [Google Scholar] [CrossRef] [PubMed]
- Su, X.; Wu, L.; Shi, P.; Song, Y. A novel approach to output feedback control of fuzzy stochastic systems. Automatica 2014, 50, 3268–3275. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Hu, G. A new approach to fuzzy output feedback controller design of continuous-time takagi–sugeno fuzzy systems. Int. J. Fuzzy Syst. 2020, 22, 2223–2235. [Google Scholar] [CrossRef]
- Tavoosi, J.; Suratgar, A.A.; Menhaj, M.B.; Mosavi, A.; Mohammadzadeh, A.; Ranjbar, E. Modeling renewable energy systems by a self-evolving nonlinear consequent part recurrent type-2 fuzzy system for power prediction. Sustainability 2021, 13, 3301. [Google Scholar] [CrossRef]
- Namadchian, Z.; Zare, A. Stability analysis of dynamic nonlinear interval type-2 TSK fuzzy control systems based on describing function. Soft Comput. 2020, 24, 14623–14636. [Google Scholar] [CrossRef]
- Achour, H.; Boukhetala, D.; Labdelaoui, H. An observer-based robust H∞ controller design for uncertain takagi–sugeno fuzzy systems with unknown premise variables using particle swarm optimisation. Int. J. Syst. Sci. 2020, 51, 2563–2581. [Google Scholar] [CrossRef]
- Hu, G.; Zhang, J.; Yan, Z. An improved approach to fuzzy dynamic output feedback H∞ control of continuous-time takagi–sugeno fuzzy systems. Int. J. Syst. Sci. 2022, 53, 1529–1544. [Google Scholar] [CrossRef]
- Nuchkrua, T.; Leephakpreeda, T.; Chen, S.L. Experimental validation for fuzzy control of servo pneumatic artificial muscle driven by metal hydride. Int. J. Fuzzy Syst. 2016, 18, 956–970. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, C.; Chen, B. New decentralized H∞ filter design for nonlinear interconnected systems based on takagi-sugeno fuzzy models. IEEE Trans. Cybern. 2015, 45, 2914–2924. [Google Scholar] [CrossRef]
- Shi, P.; Su, X.; Li, F. Dissipativity-based filtering for fuzzy switched systems with stochastic perturbation. IEEE Trans. Autom. Control 2016, 61, 1694–1699. [Google Scholar] [CrossRef]
- Dong, J.; Yang, G. H∞ filtering for continuous-time t–s fuzzy systems with partly immeasurable premise variables. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1931–1940. [Google Scholar] [CrossRef]
- Chang, X.; Yang, G.; Wang, H. Observer-based H∞ control for discrete-time t-s fuzzy systems. Int. J. Syst. Sci. 2011, 42, 1801–1809. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, H.; Liu, X. H∞ observer design for continuous-time takagi-sugeno fuzzy model with unknown premise variables via non-quadratic lyapunov function. IEEE Trans. Cybern. 2016, 46, 1986–1996. [Google Scholar] [CrossRef] [PubMed]
- Tong, S.; Min, X.; Li, Y. Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans. Cybern. 2020, 50, 3903–3913. [Google Scholar] [CrossRef] [PubMed]
- Guerra, T.M.; Vermeiren, L. LMI-based relaxed nonquadratic stabilization conditions for nonlinear systems in the takagi-sugeno’s form. Automatica 2004, 40, 823–829. [Google Scholar] [CrossRef]
- Faria, F.A.; Silva, G.N.; Oliveira, V.A. Reducing the conservatism of lmi-based stabilisation conditions for t-s fuzzy systems using fuzzy lyapunov functions. Int. J. Syst. Sci. 2013, 44, 1956–1969. [Google Scholar] [CrossRef]
- Pan, J.T.; Guerra, T.M.; Fei, S.M.; Jaadari, A. Nonquadratic stabilization of continuous t–s fuzzy models: Lmi solution for a local approach. IEEE Trans. Fuzzy Syst. 2012, 20, 594–602. [Google Scholar] [CrossRef]
- Márquez, R.; Guerra, T.M.; Bernal, M.; Kruszewski, A. Asymptotically necessary and sufficient conditions for takagi–sugeno models using generalized non-quadratic parameter-dependent controller design. Fuzzy Sets Syst. 2017, 306, 48–62. [Google Scholar] [CrossRef]
- Wang, L.; Lam, H.K. H∞ control for continuous-time takagi–sugeno fuzzy model by applying generalized lyapunov function and introducing outer variables. Automatica 2021, 125, 109409. [Google Scholar] [CrossRef]
- Weiss, L.; Infante, E. Finite time stability under perturbing forces and on product spaces. IEEE Trans. Autom. Control 1967, 12, 54–59. [Google Scholar] [CrossRef]
- Amato, F.; Ariola, M.; Dorato, P. Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001, 37, 1459–1463. [Google Scholar] [CrossRef]
- Meng, Q.; Shen, Y. Finite-time H∞ control for linear continuous system with norm-bounded disturbance. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 1043–1049. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, M.; Chang, G.; Lv, H.; Park, J.H. Finite-time annular domain stability and stabilization of itô stochastic systems with wiener noise and poisson jumps-differential gronwall inequality approach. Appl. Math. Comput. 2022, 412, 126589. [Google Scholar] [CrossRef]
- Liu, X.; Teng, Y.; Li, Y. Finite-time H∞ static output feedback control for itô stochastic markovian jump systems. Mathematics 2020, 8, 1709. [Google Scholar] [CrossRef]
- Yan, Z.; Zhou, X.; Ji, D.; Zhang, M. Finite-time annular domain stability and stabilisation of itô-type stochastic time-varying systems with wiener and poisson noises. Int. J. Control 2021, 31, 2290–2304. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, W.; Zhang, G. Finite-time stability and stabilization of itô stochastic systems with markovian switching: Mode-dependent parameter approach. IEEE Trans. Autom. Control 2015, 60, 2428–2433. [Google Scholar] [CrossRef]
- Joby, M.; Santra, S.; Anthoni, S.M. Finite-time contractive boundedness of extracorporeal blood circulation process. Appl. Math. Comput. 2021, 388, 125527. [Google Scholar] [CrossRef]
- Wang, L.; Peng, J.; Liu, X.; Zhang, H. An approach to observer design of continuous-time takagi–sugeno fuzzy model with bounded disturbances. Inf. Sci. 2015, 324, 108–125. [Google Scholar] [CrossRef]
- Wang, H.O.; Tanaka, K. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Zong, G.; Wang, R.; Zheng, W.; Hou, L. Finite-time H∞ control for discrete-time switched nonlinear systems with time delay. Int. J. Robust Nonlinear Control 2015, 25, 914–936. [Google Scholar] [CrossRef]
- Zhou, J.; Park, J.H.; Ma, Q. Non-fragile observer-based H∞ control for stochastic time-delay systems. Appl. Math. Comput. 2016, 291, 69–83. [Google Scholar] [CrossRef]
- Tuan, H.D.; Apkarian, P.; Narikiyo, T.; Yamamoto, Y. Parameterized linear matrix inequality techniques in fuzzy control system design. IEEE Trans. Fuzzy Syst. 2001, 9, 324–332. [Google Scholar] [CrossRef] [Green Version]
- Misgeld, B.J.E.; Werner, J.; Hexamer, M. Robust and self-tuning blood flow control during extracorporeal circulation in the presence of system parameter uncertainties. Med. Biol. Eng. Comput. 2005, 43, 589–598. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).