
Fuzzy-Based Adaptive Dynamic Surface Control for a Type of Uncertain Nonlinear System with Unknown Actuator Faults

Abstract
:1. Introduction
- (1)
- (2)
- Different from references [18,19], the problem of the “explosion of complexity” can be overcome owing to the introduction of the dynamic surface control technique, and the derivation of nonlinear terms in the backstepping recursive design is eliminated. In addition, fuzzy logic systems are used to approximate the unknown nonlinear dynamics, which effectively reduces the difficulty of the control law design;
- (3)
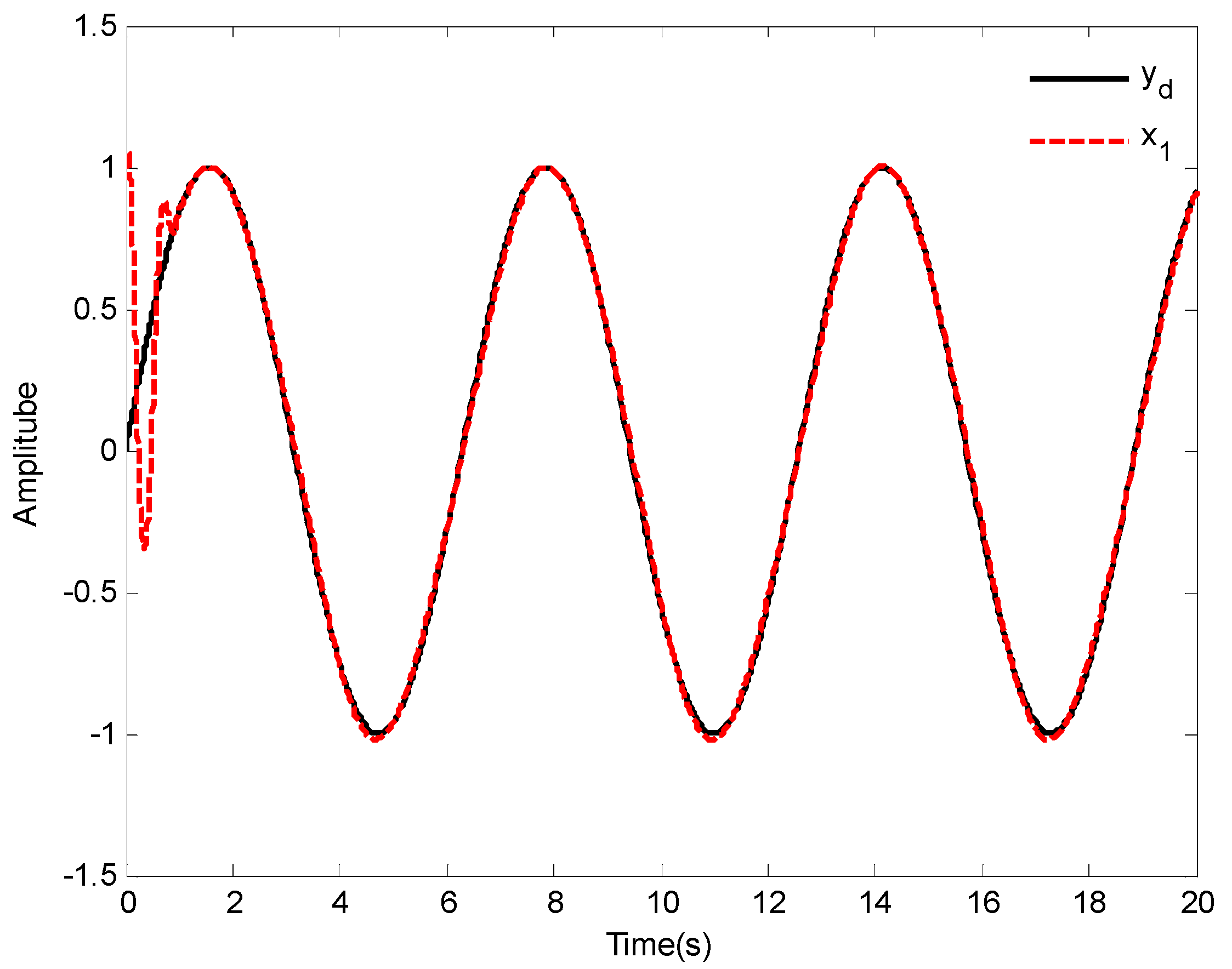
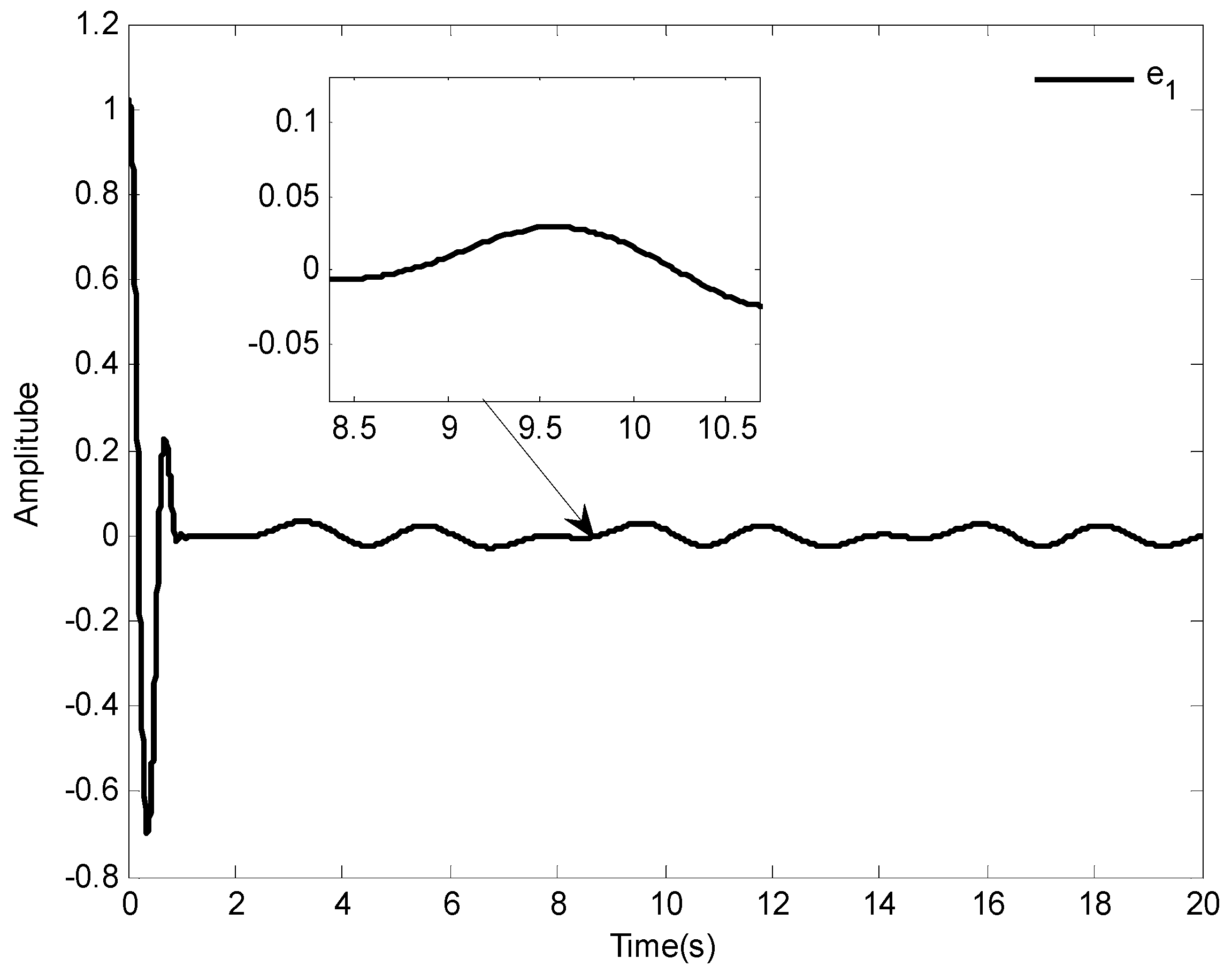
- The effectiveness of the control law designed in this paper is proved by theoretical analysis. By adjusting the design parameters, it is also proved that all of the signals in the closed-loop system are semi-global bounded, and the tracking error converges to the specified small neighborhood of the origin.
2. Problem Description and Preliminaries
2.1. System Description
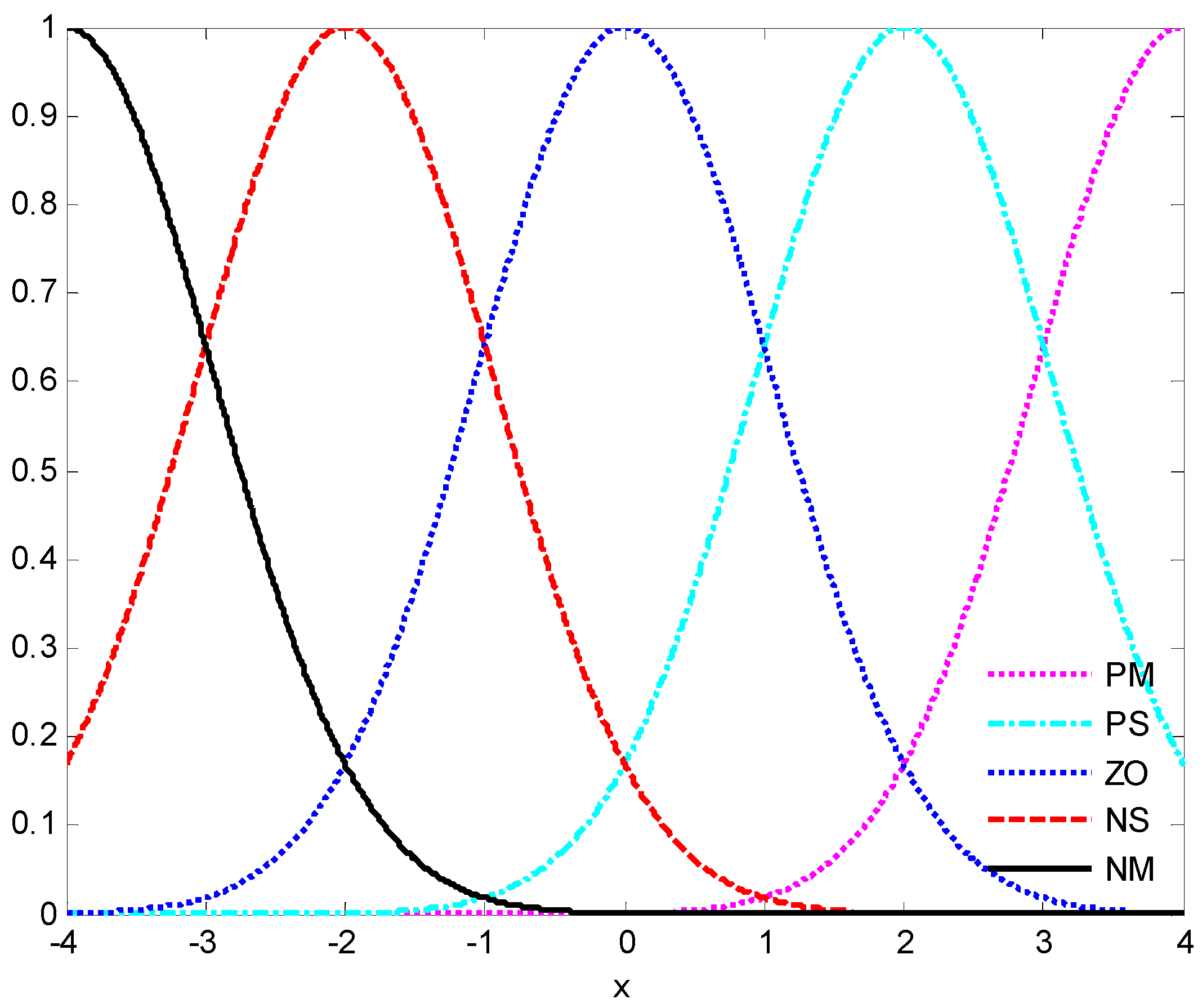
2.2. Fuzzy Logic Systems
2.3. Preliminaries
3. Adaptive Fuzzy Dynamic Surface Controller Design
4. Stability Analysis
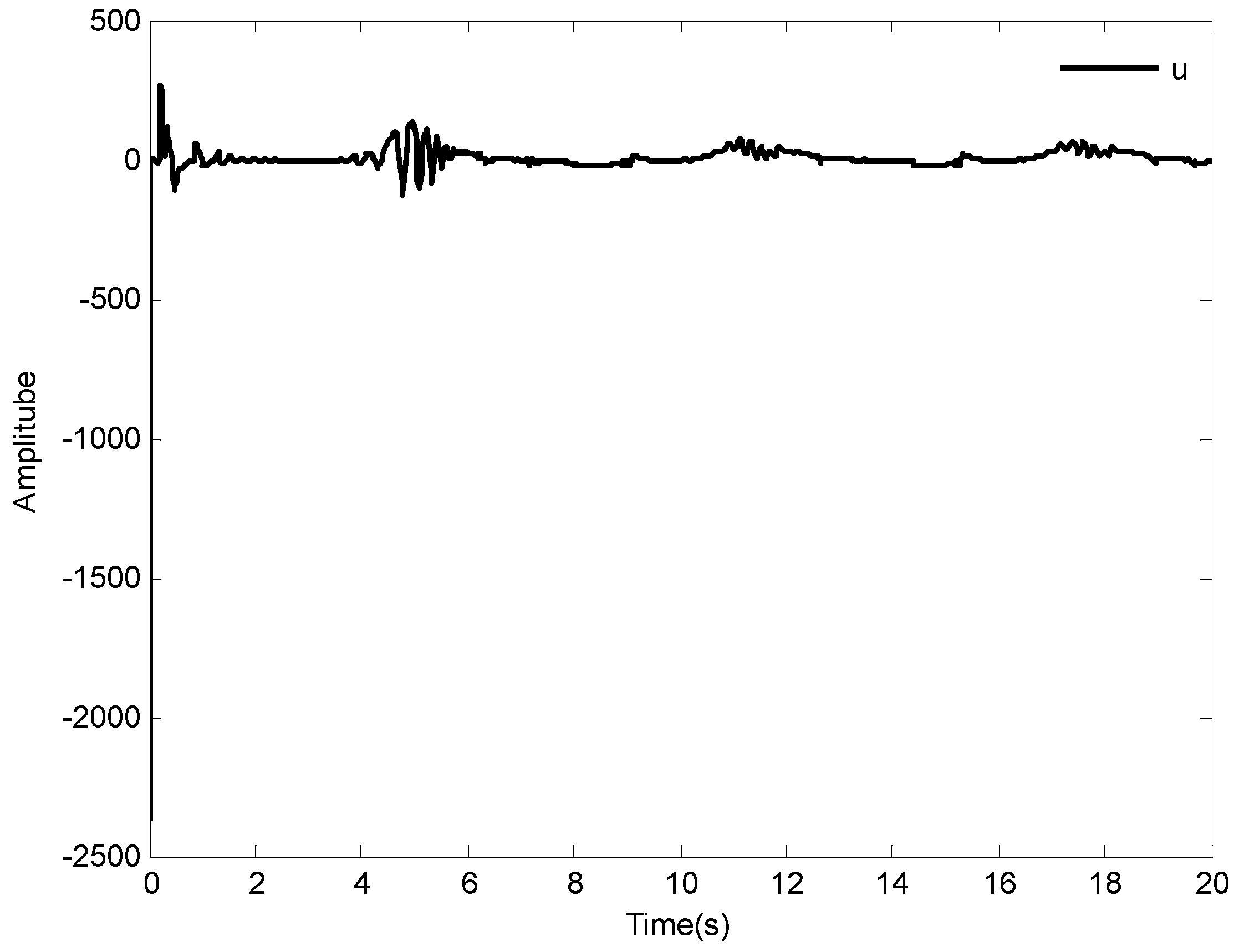
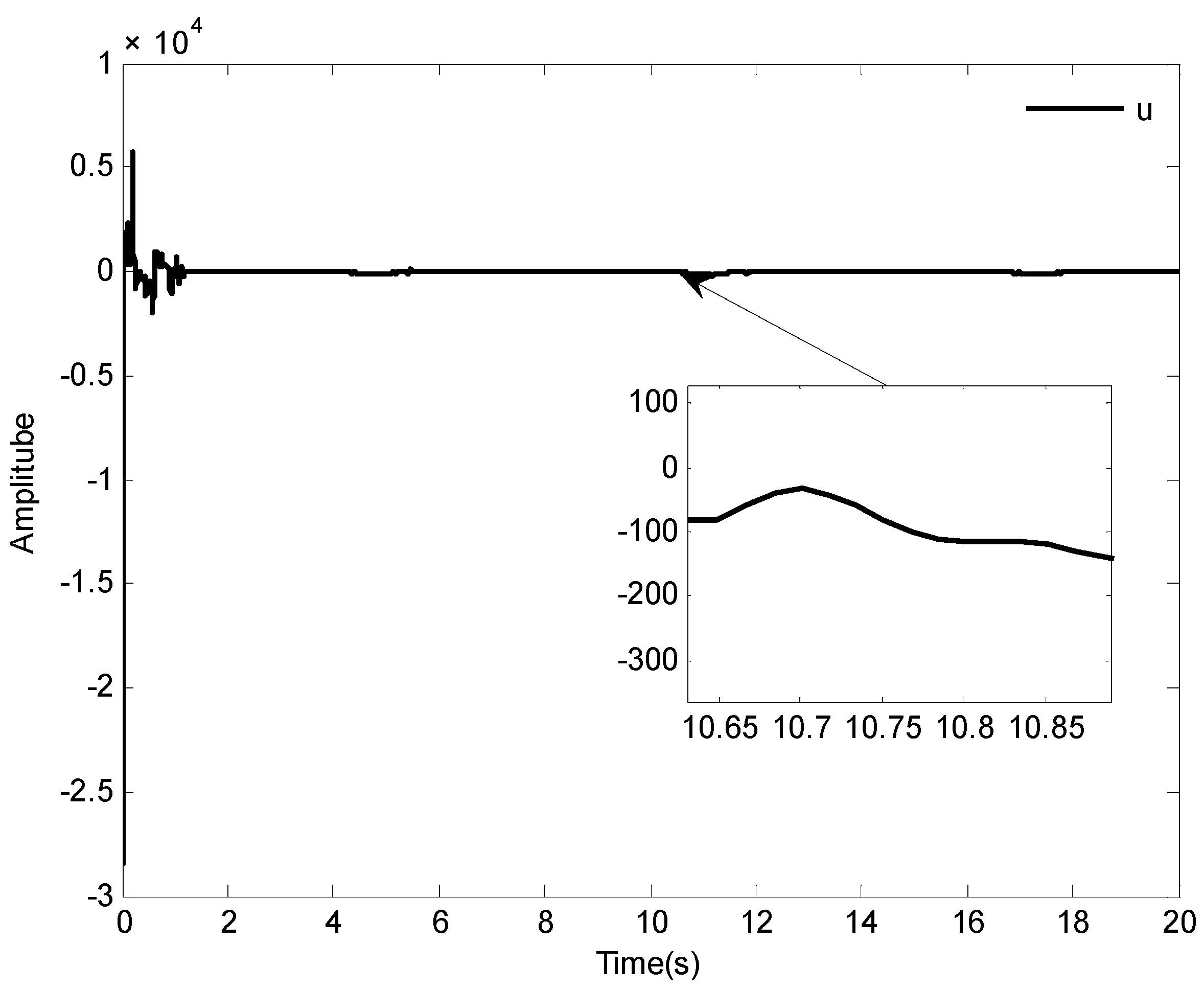
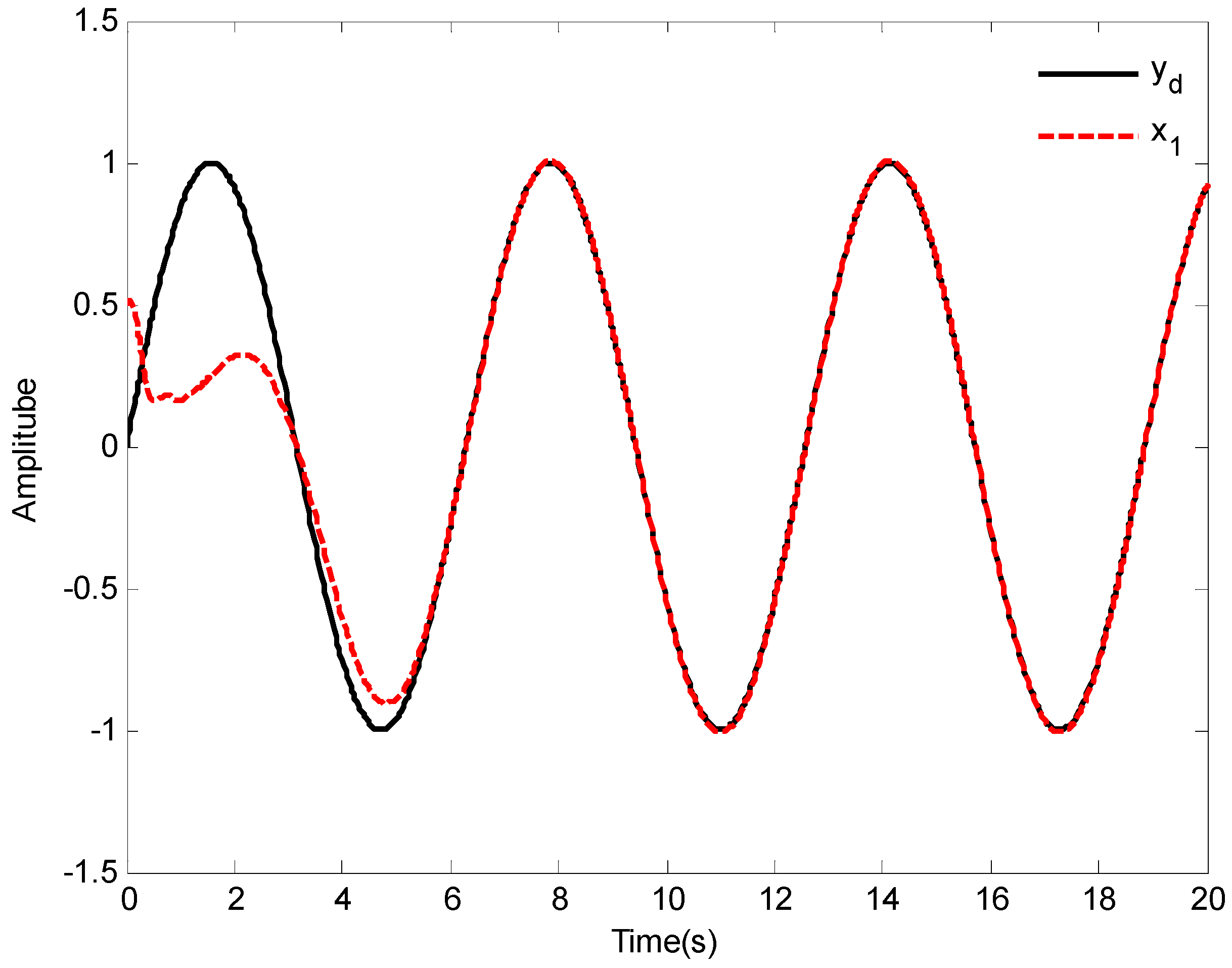
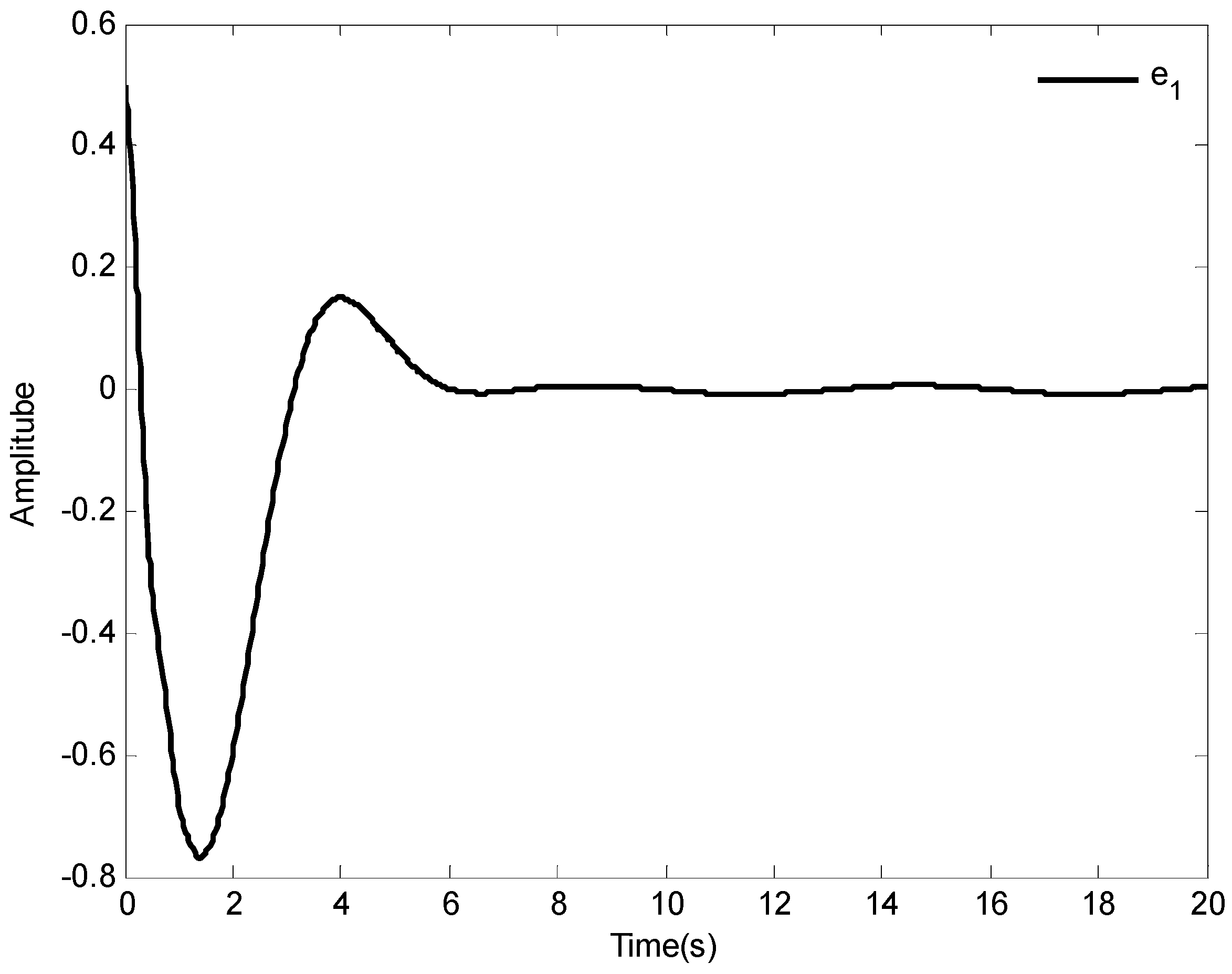
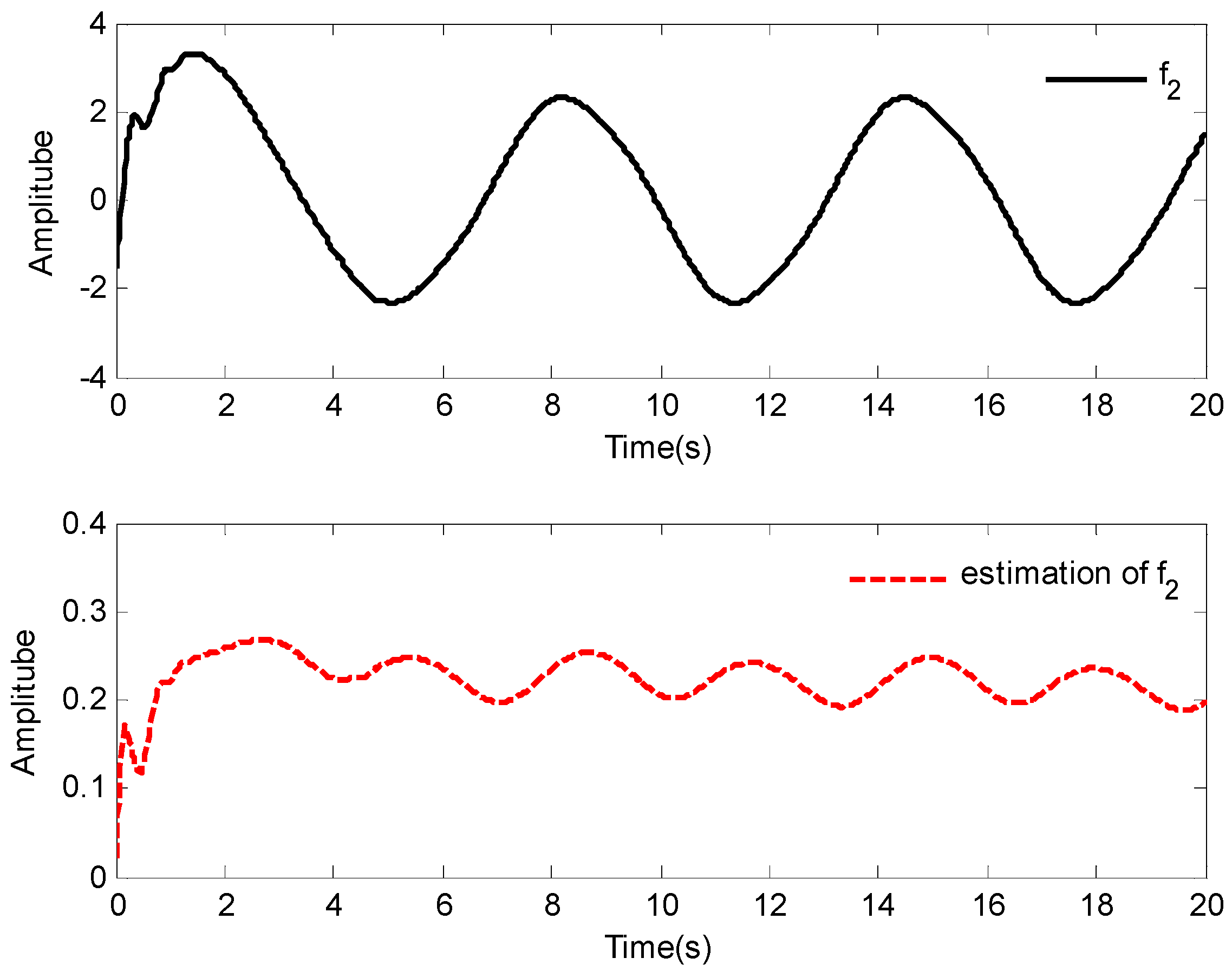
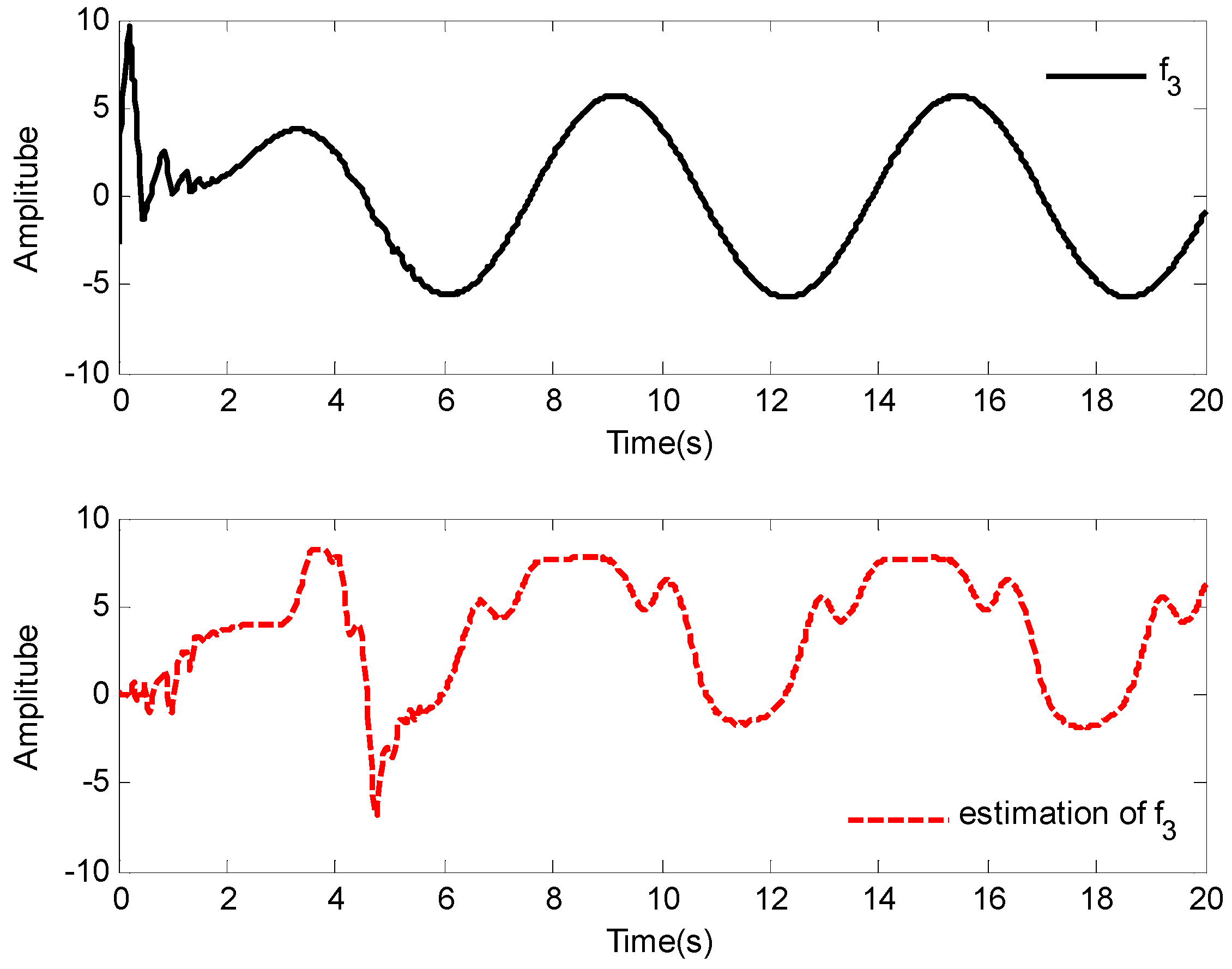
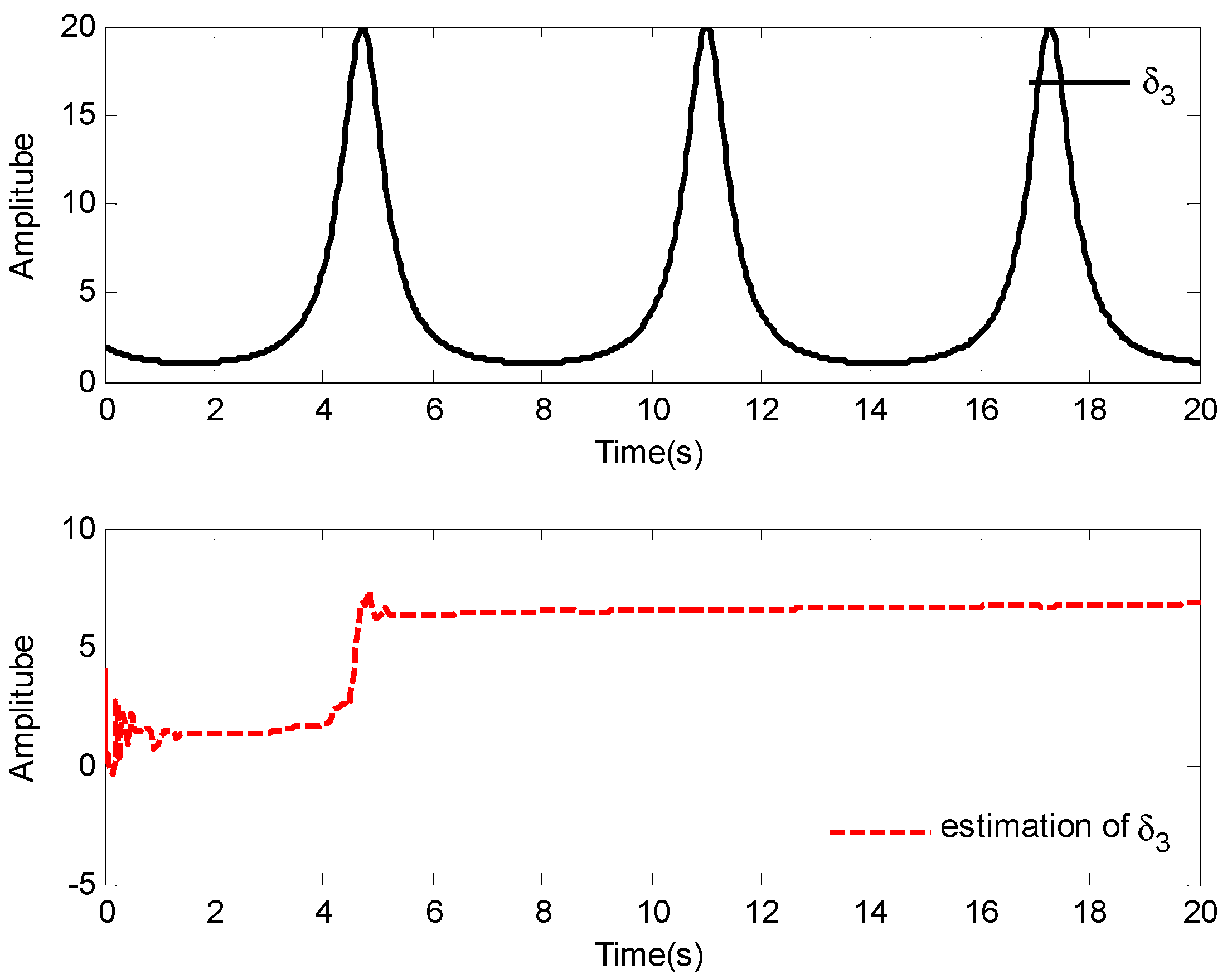
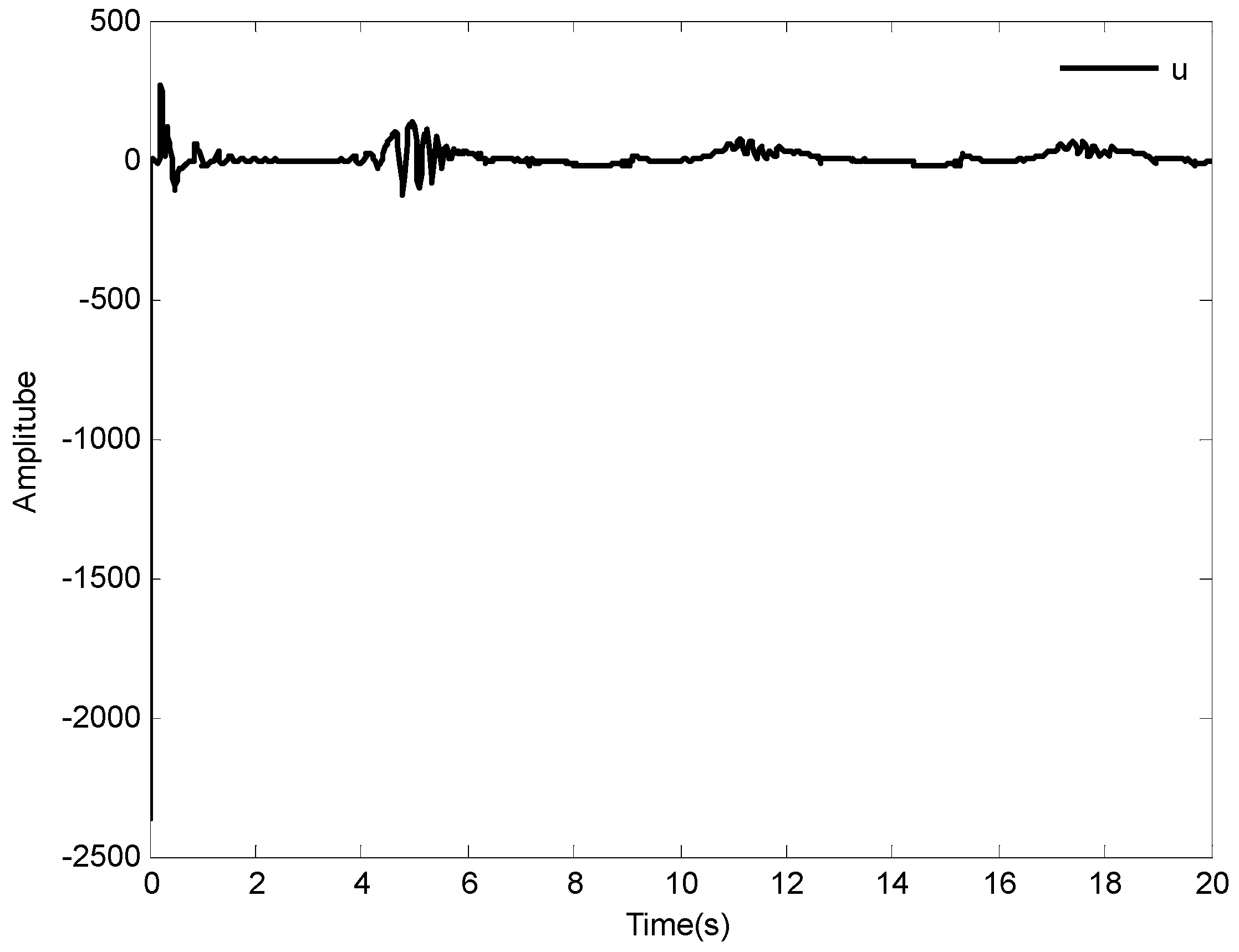
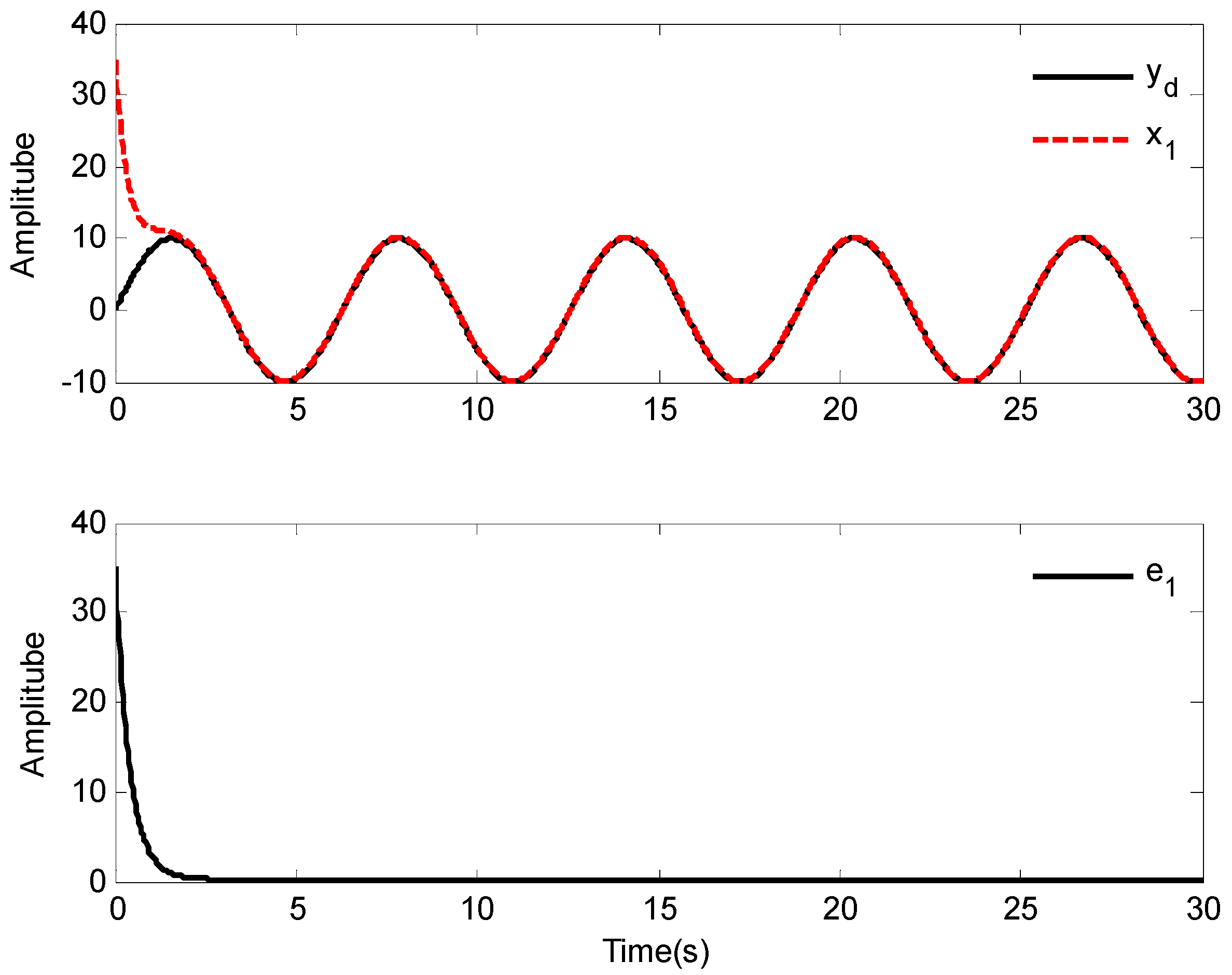
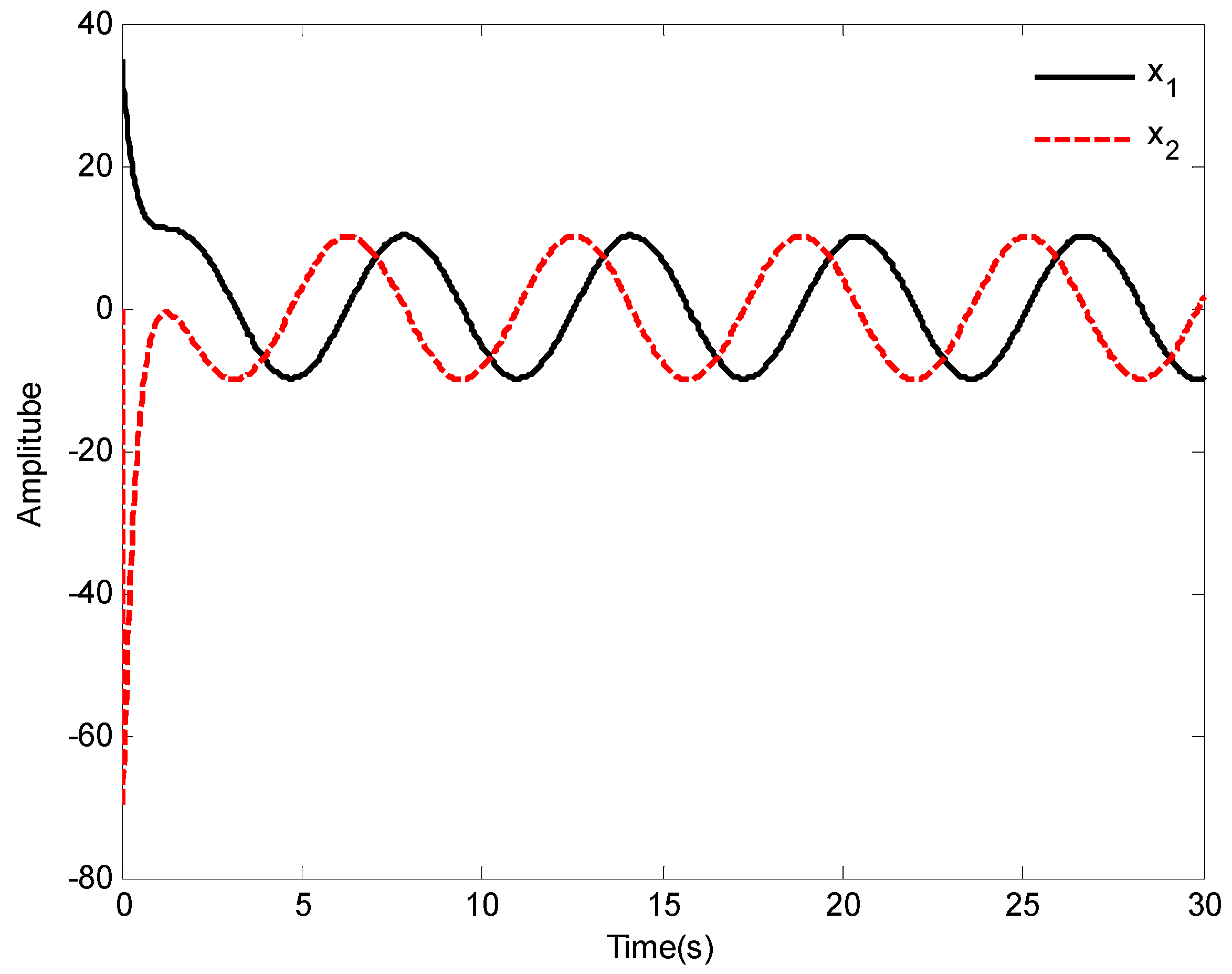
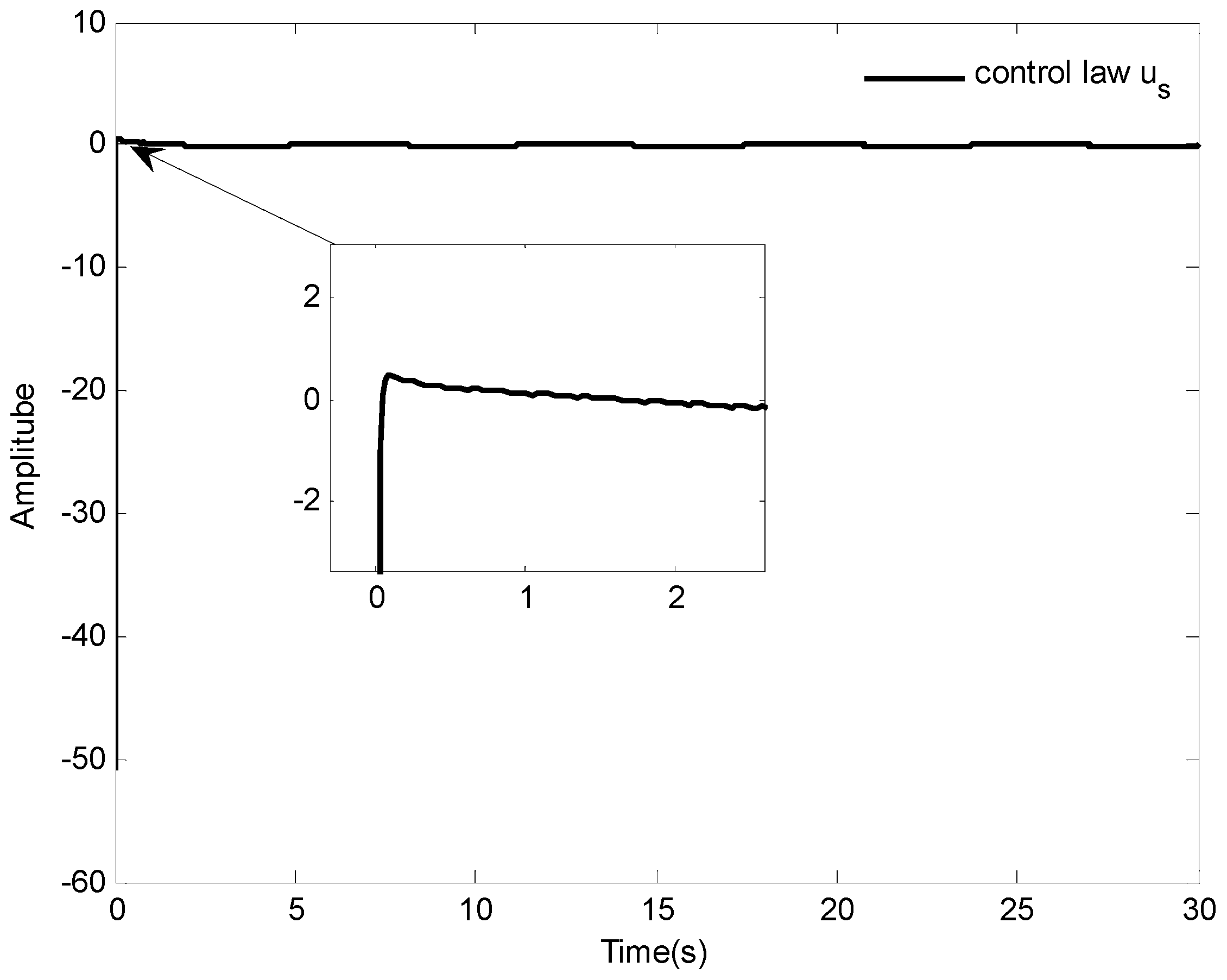
5. Simulation Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.Y.; Sun, X.X.; Liu, S.G.; Deng, X.F. Distributed fault tolerant model predictive control for multi-unmanned aerial vehicle system. Asian J. Control 2021. [Google Scholar] [CrossRef]
- Yoo, S.J.; Park, B.S. Quantized feedback control strategy for tracking performance guarantee of nonholonomic mobile robots with uncertain nonlinear dynamics. Appl. Math. Comput. 2021, 407, 126349. [Google Scholar] [CrossRef]
- Cheng, X.; Zhang, Y.J.; Liu, H.S.; Wollherr, D.; Buss, M. Adaptive neural backstepping control for flexible-joint robot manipulator with bounded torque inputs. Neurocomputing 2021, 458, 70–86. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Yang, X.H.; Liu, X.P. RBFNN-based nonsingular fast terminal sliding mode control for robotic manipulators including actuator dynamics. Neurocomputing 2019, 362, 72–82. [Google Scholar] [CrossRef]
- Zhang, R.D. Improved control for industrial systems over model uncertainty: A receding horizon expanded state space control. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1343–1349. [Google Scholar] [CrossRef]
- Ji, R.H.; Ma, J.; Li, D.Y.; Ge, S.Z.S. Finite-time adaptive output feedback control for mimo nonlinear systems with actuator faults and saturations. IEEE Trans. Fuzzy Syst. 2021, 29, 2256–2270. [Google Scholar] [CrossRef]
- Peng, J.Z.; Dubay, R. Adaptive fuzzy backstepping control for a class of uncertain nonlinear strict-feedback systems based on dynamic surface control approach. Expert Syst. Appl. 2019, 120, 239–252. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.Q.; Liu, P.X.P. Fixed-time adaptive event-triggered tracking control of uncertain nonlinear systems. Nonlinear Dyn. 2020, 100, 3381–3397. [Google Scholar] [CrossRef]
- Yang, Z.J.; Zhang, H.G. A fuzzy adaptive tracking control for a class of uncertain strick-feedback nonlinear systems with dead-zone input. Neurocomputing 2018, 272, 130–135. [Google Scholar] [CrossRef]
- Wu, L.B.; Yang, G.H. Adaptive fuzzy tracking control for a class of uncertain nonaffine nonlinear systems with dead-zone inputs. Fuzzy Sets Syst. 2016, 290, 1–21. [Google Scholar] [CrossRef]
- Jeong, D.M.; Yoo, S.J. Adaptive event-triggered tracking using nonlinear disturbance observer of arbitrarily switched uncertain nonlinear systems in pure-feedback form. Appl. Math. Comput. 2021, 407, 126335. [Google Scholar] [CrossRef]
- Lin, W.; Wang, Y.J.; Liu, X.L. Asymptotic stabilization of nonlinear systems with long input delay via memoryless feedback: A linearization method. Automatica 2021, 130, 109731. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; Zhang, Y.; Chen, C.L.P. Adaptive quantized fuzzy control of stochastic nonlinear systems with actuator dead-zone. Inf. Sci. 2016, 370, 385–401. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.F.; Wen, G.H.; Yu, X.H.; Chen, G.R. Distributed average tracking for lipschitz-type of nonlinear dynamical systems. IEEE Trans. Cybern. 2019, 49, 4140–4152. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deng, X.F.; Zhang, C.; Ge, Y. Adaptive neural network dynamic surface control of uncertain strict-feedback nonlinear systems with unknown control direction and unknown actuator fault. J. Frankl. Inst. 2022. [Google Scholar] [CrossRef]
- Shao, X.F.; Ye, D. Event-based adaptive fuzzy fixed-time control for nonlinear interconnected systems with non-affine nonlinear faults. Fuzzy Sets Syst. 2022, 432, 1–27. [Google Scholar] [CrossRef]
- Wang, S.X.; Xia, J.W.; Wang, X.L.; Yang, W.J.; Wang, L.Q. Adaptive neural networks control for MIMO nonlinear systems with unmeasured states and unmodeled dynamics. Appl. Math. Comput. 2021, 408, 126369. [Google Scholar] [CrossRef]
- Li, X.Y.; Wen, C.Y.; Zou, Y. Adaptive backstepping control for fractional-order nonlinear systems with external disturbance and uncertain parameters using smooth control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7860–7869. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.D.; Chen, C.L.P.; Chen, L. Control of nonlinear systems under dynamic constraints: A unified barrier function-based approach. Automatica 2020, 119, 109102. [Google Scholar] [CrossRef]
- Meng, F.F.; Zhao, L.; Yu, J.P. Backstepping based adaptive finite-time tracking control of manipulator systems with uncertain parameters and unknown backlash. J. Frankl. Inst. 2020, 357, 11281–11297. [Google Scholar] [CrossRef]
- Parsa, P.; Akbarzadeh-T, M.R.; Baghbani, F. Command-filtered backstepping robust adaptive emotional control of strict-feedback nonlinear systems with mismatched uncertainties. Inf. Sci. 2021, 579, 434–453. [Google Scholar] [CrossRef]
- Cui, G.Z.; Yu, J.P.; Wang, Q.G. Finite-time adaptive fuzzy control for mimo nonlinear systems with input saturation via improved command-filtered backstepping. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 980–989. [Google Scholar] [CrossRef]
- Wu, L.B.; Wang, H.; He, X.Q.; Zhang, D.Q. Decentralized adaptive fuzzy tracking control for a class of uncertain large-scale systems with actuator nonlinearities. Appl. Math. Comput. 2018, 332, 390–405. [Google Scholar] [CrossRef]
- Dastres, H.; Rezaie, B.; Baigzadehnoe, B. Neural-network-based adaptive backstepping control for a class of unknown nonlinear time-delay systems with unknown input saturation. Neurocomputing 2020, 398, 131–152. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.P.; Cao, J.D.; Wang, H.X.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef]
- Ma, H.; Liang, H.J.; Zhou, Q.; Ahn, C.K. Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 506–515. [Google Scholar] [CrossRef]
- Jia, F.J.; Yan, X.; Wang, X.H.; Lu, J.W.; Li, Y.M. Robust adaptive prescribed performance dynamic surface control for uncertain nonlinear pure-feedback systems. J. Frankl. Inst. 2020, 357, 2752–2772. [Google Scholar] [CrossRef]
- Zhao, K.; Song, Y.D. Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems. IEEE Trans. Autom. Control 2019, 64, 1265–1272. [Google Scholar] [CrossRef]
- Edalati, L.; Sedigh, A.K.; Shooredeli, M.A.; Moarefianpour, A. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech. Syst. Signal Processing 2018, 100, 311–329. [Google Scholar] [CrossRef]
- Rahmani, Z.; Baigzadehnoe, B.; Rezaie, B. Tracking control of a class of nonlinear systems with output delay based on adaptive fuzzy dynamic surface control. Int. J. Syst. Sci. 2020, 51, 1280–1306. [Google Scholar] [CrossRef]
- Baigzadehnoe, B.; Rahmani, Z.; Khosravi, A.; Rezaie, B. Adaptive decentralized fuzzy output feedback tracking control for a class of nonlinear large-scale systems with input delays. Trans. Inst. Meas. Control 2018, 40, 3534–3548. [Google Scholar] [CrossRef]
- Baigzadehnoe, B.; Rahmani, Z.; Khosravi, A.; Rezaie, B. Adaptive decentralized fuzzy dynamic surface control scheme for a class of nonlinear large-scale systems with input and interconnection delays. Eur. J. Control 2020, 54, 33–48. [Google Scholar] [CrossRef]
- Baigzadehnoe, B.; Rahmani, Z.; Khosravi, A.; Rezaie, B. Control of interconnected systems with sensor delay based on decentrialized adaptive neural dynamic surface method. J. Syst. Control Eng. 2021, 235, 751–768. [Google Scholar]
- Zhou, Z.Y.; Tong, D.B.; Chen, Q.Y.; Zhou, W.N.; Xu, Y.H. Adaptive NN control for nonlinear systems with uncertainty based on dynamic surface control. Neurocomputing 2021, 421, 161–172. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.Y.; Song, X.N.; Zhang, Z.Q. Adaptive neuro-fuzzy backstepping dynamic surface control for uncertain fractional-order nonlinear systems. Neurocomputing 2019, 360, 172–184. [Google Scholar] [CrossRef]
- Shao, X.F.; Ye, D. Fuzzy adaptive event-triggered secure control for stochastic nonlinear high-order mass subject to DoS attacks and actuator faults. IEEE Trans. Fuzzy Syst. 2021, 29, 3812–3821. [Google Scholar] [CrossRef]
- Lv, M.L.; Yu, W.W.; Baldi, S. The set-invariance paradigm in fuzzy adaptive DSC design of large-scale nonlinear input-constrained systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1035–1045. [Google Scholar] [CrossRef]
- Shojaei, F.; Arefi, M.M.; Khayatian, A.; Karimi, H.R. Observer-based fuzzy adaptive dynamic surface control of uncertain nonstrict feedback systems with unknown control direction and unknown dead-zone. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2340–2351. [Google Scholar] [CrossRef]
- Wang, H.Q.; Liu, P.X.P.; Zhao, X.D.; Liu, X.P. Adaptive fuzzy finite-time control of nonlinear systems with actuator faults. IEEE Trans. Cybern. 2020, 50, 1786–1797. [Google Scholar] [CrossRef]
- Zhao, K.J.; Chen, W. Adaptive neural quantized control of MIMO nonlinear systems under actuation faults and time-varying output constraints. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3471–3481. [Google Scholar] [CrossRef]
- Ma, J.L.; Park, J.H.; Xu, S.Y. Global adaptive control for uncertain nonlinear systems with sensor and actuator faults. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5503–5510. [Google Scholar] [CrossRef]
- Wang, Z.; Shan, J.J. Fixed-time consensus for uncertain multi-agent systems with actuator faults. J. Frankl. Inst. 2020, 357, 1199–1220. [Google Scholar] [CrossRef]
- Wang, D.; Huang, J. Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw. 2005, 16, 195–202. [Google Scholar] [CrossRef]
- Fortuna, L.; Muscato, G. A roll stabilization system for a monohull ship: Modeling, identification, and adaptive control. IEEE Trans. Control Syst. Technol. 1996, 4, 18–28. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Control Law | First-Order Filter and Adaptation Law |
|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Wang, J. Fuzzy-Based Adaptive Dynamic Surface Control for a Type of Uncertain Nonlinear System with Unknown Actuator Faults. Mathematics 2022, 10, 1624. https://doi.org/10.3390/math10101624
Deng X, Wang J. Fuzzy-Based Adaptive Dynamic Surface Control for a Type of Uncertain Nonlinear System with Unknown Actuator Faults. Mathematics. 2022; 10(10):1624. https://doi.org/10.3390/math10101624
Chicago/Turabian StyleDeng, Xiongfeng, and Jiakai Wang. 2022. "Fuzzy-Based Adaptive Dynamic Surface Control for a Type of Uncertain Nonlinear System with Unknown Actuator Faults" Mathematics 10, no. 10: 1624. https://doi.org/10.3390/math10101624
APA StyleDeng, X., & Wang, J. (2022). Fuzzy-Based Adaptive Dynamic Surface Control for a Type of Uncertain Nonlinear System with Unknown Actuator Faults. Mathematics, 10(10), 1624. https://doi.org/10.3390/math10101624