


Early Emergence of Agreement in Yucatec Maya Sign Language


Abstract
:1. Introduction
1.1. The Grammatical Use of Space in Sign Languages
1.2. Establishing Pronominal Reference in Space
1.3. Evolution of Space as a Means to Express Verb Agreement
2. The Yucatec Maya Sign Language
3. Materials and Methods
3.1. Materials
3.2. Participants
3.3. Transcription and Coding
4. Results
4.1. Pronoun Marking and the Use of the Signing Space
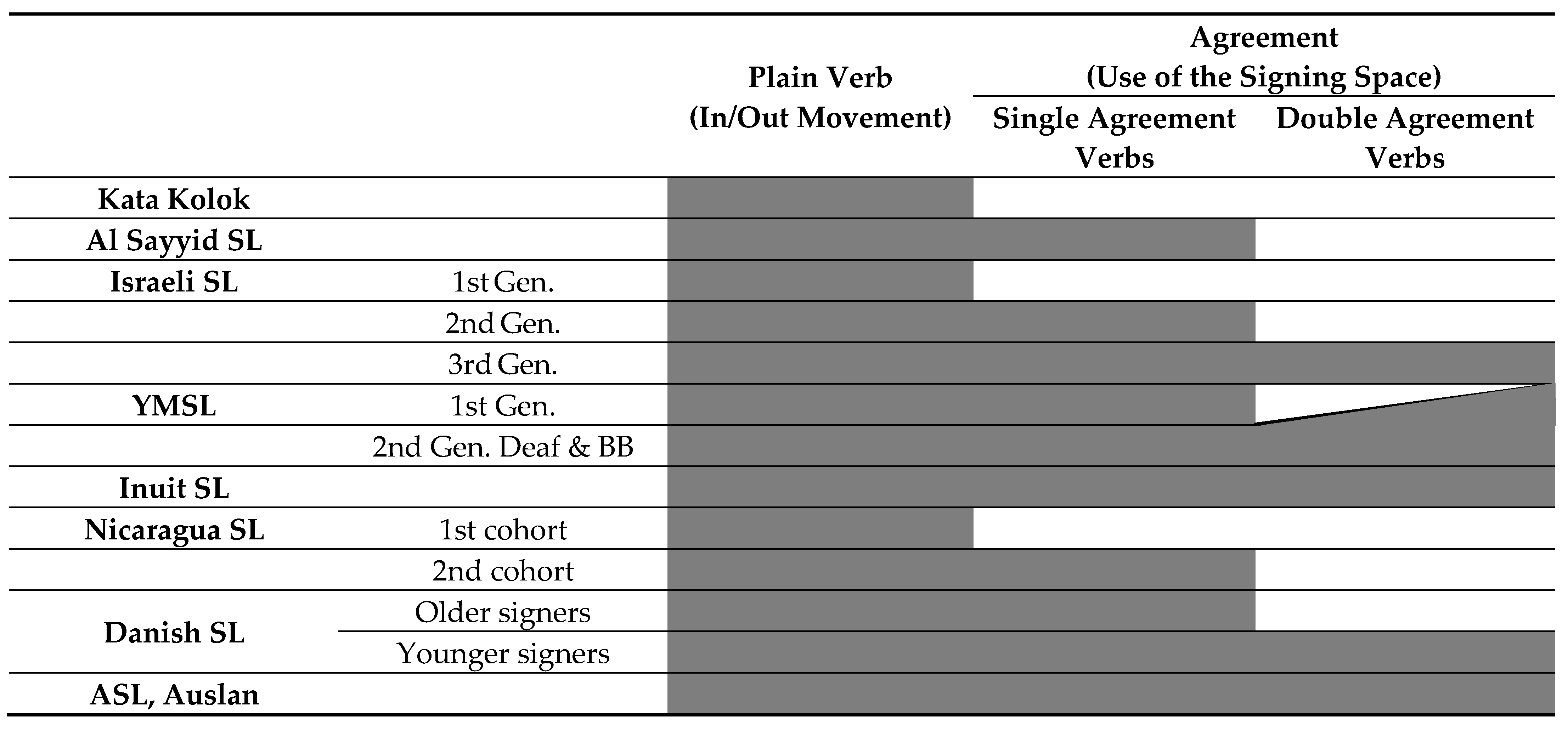
4.2. The Use of Space and the Verb Classes
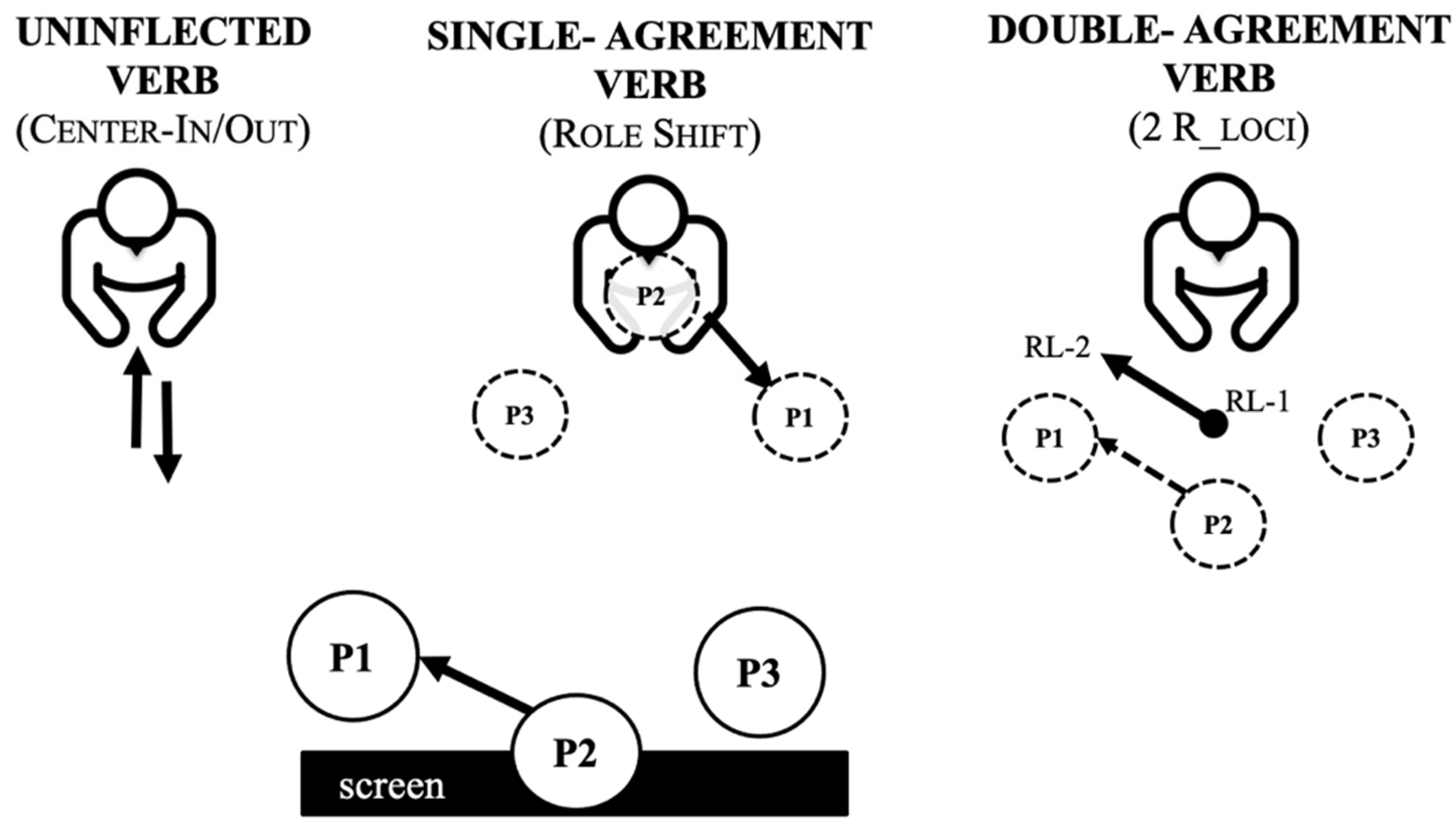
4.2.1. Uninflected Verbs
4.2.2. Single Agreement Verbs
4.2.3. Double Agreement Verbs
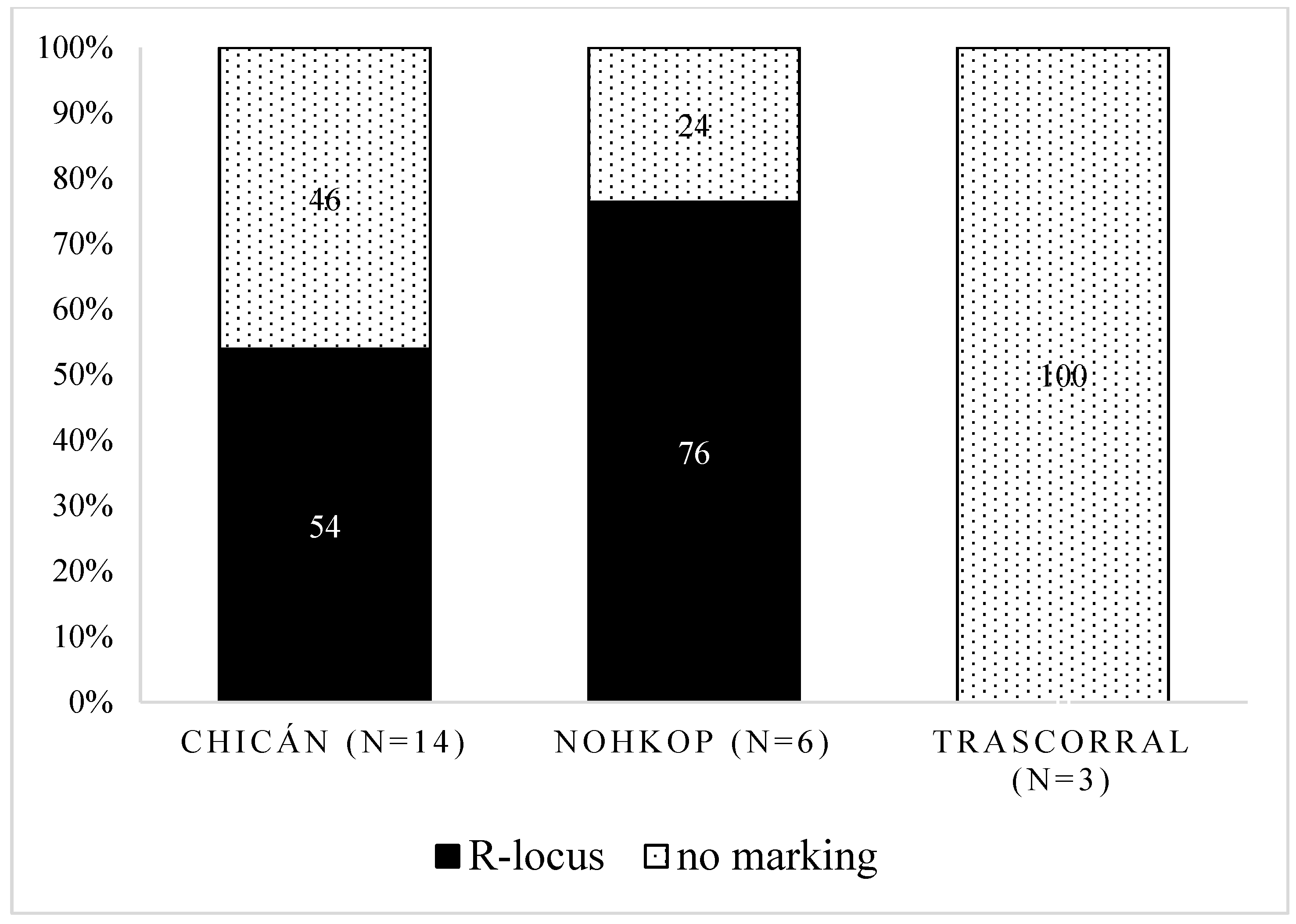
4.2.4. Comparison between Communities
5. Discussion
5.1. Limitations of the Studies
5.2. An Evolutionary Path
5.2.1. Size of the Community and the Critical Mass of Deaf Signers
5.2.2. The Age of the Sign Language and the Number of Generations
5.2.3. Early Exposure to the Language
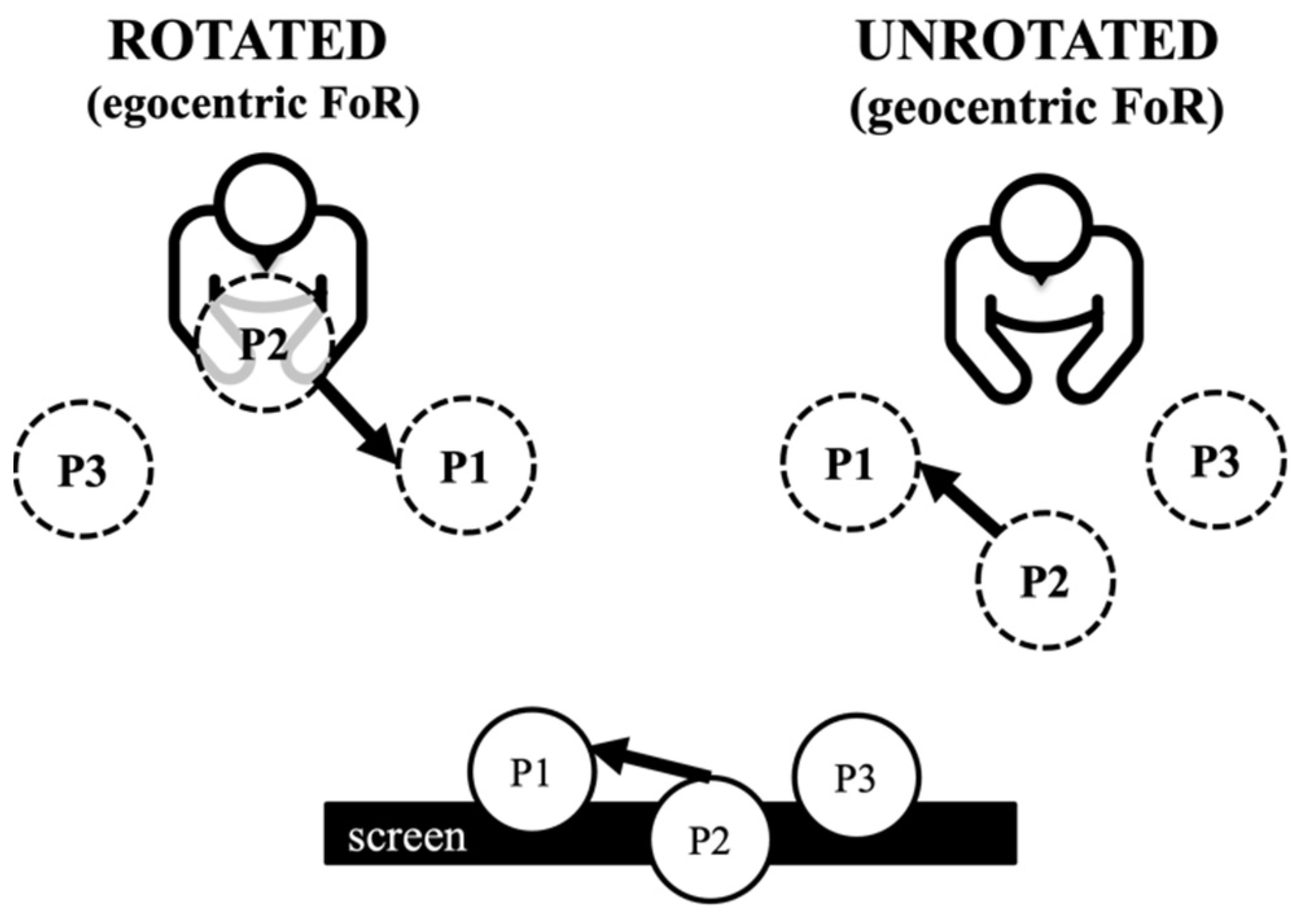
5.3. The Impact of the Geocentric Frame of Reference and the Semiotic Jump towards an Abstract Use of Space
5.3.1. Looking at Signing Space in Terms of Frames of Reference (FoR)
5.3.2. The Condition of Truth in the Use of Space
5.3.3. A Cultural Habit of Allocentric Localization
5.3.4. Towards an Arbitrary Use of the Signing Space
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
| 1 | Results for the use of buoys were collapsed with the no-marking strategy as it only accounts for one participant. |
| 2 | Different authors refer to syntactic roles such as subject and direct or indirect object, and others prefer semantic roles like agent and patient or source and goal. For our purposes here, these terms are used interchangeably. |
| 3 |
References
- Aronoff, Mark, Irit Meir, Carol Padden, and Wendy Sandler. 2005. Morphological Universals and the Sign Language Type. In Yearbook of Morphology. Edited by G. Booij and J. van Marle. Dordrecht: Springer, pp. 19–39. [Google Scholar] [CrossRef]
- Bauer, Anastasia. 2014. The Use of Signing Space in a Shared Sign Language of Australia. Boston and Lancaster: De Gruyter Mouton. [Google Scholar]
- Blythe, Joe, Kinngirri Carmelita Mardigan, Mawurt Ernest Perdjert, and Stoakes Hywel. 2016. Pointing out Directions in Murrinhpatha. Open Linguistics 2: 132–59. [Google Scholar]
- Brugman, Hennie, and Albert Russel. 2004. Annotating Multi-Media/Multi-Modal Resources with ELAN. Paper presented at Fourth International Conference on Language Resources and Evaluation (LREC’04), Marseille, France, June 20–25; Lisbon: European Language Resources Association (ELRA). [Google Scholar]
- Coppola, Marie. 2020. Sociolinguistic Sketch: Nicaraguan Sign Language and Homesign Systems in Nicaragua. In Emerging Sign Languages of the America. Edited by Olivier Le Guen, Josefina Safar and Marie Coppola. Sign Language Typology [SLT]. Berlin and Boston: De Gruyter Mouton, pp. 439–50. [Google Scholar]
- de Beuzeville, L., Trevor Johnston, and Adam Schembri. 2009. The Use of Space with Indicating Verbs in Australian Sign Language: A Corpus-Based Investigation. Sign Language and Linguistics 12: 52–83. [Google Scholar] [CrossRef]
- de Vos, Connie. 2012. Sign-Spatiality in Kata Kolok: How a Village Sign Language of Bali Inscribes Its Signing Space. Ph.D. thesis, Max Planck Institute for Psycholinguistics, Nijmegen, The Netherlands. [Google Scholar]
- de Vos, Connie, and Roland Pfau. 2015. Sign Language Typology: The Contribution of Rural Sign Languages. Annual Review of Linguistics 1: 265–88. [Google Scholar] [CrossRef]
- Emmorey, Karen, and Judy S. Reilly. 1995. Theoretical Issues Relating Language, Gesture, and Space: An Overview. In Language, Gesture, and Space. Edited by Karen Emmorey and Judy S. Reilly. Hillsdale: Lawrence Erlbaum Associates, pp. 1–16. [Google Scholar]
- Engberg-Pedersen, Elisabeth. 1993. Space in Danish Sign Language. Hamburg: Signum-Verlag. [Google Scholar]
- Escobedo Delgado, Cesar Ernesto. 2012. Chican Sign Language: A Sociolinguistic Sketch. In Endangered Sign Languages in Village Communities: Anthropological and Linguistic Insights. Edited by Ulrike Zeshan and Connie de Vos. Berlin: Mouton de Gruyter & Ishara Press, pp. 377–80. [Google Scholar]
- Gagne, Deanna. 2017. With a Little Help from My Friends: The Contributions of a Peer Language Network on the Conventionalization of Space in an Emerging Language. Doctoral dissertation, University of Connecticut, Storrs, CT, USA. [Google Scholar]
- Haviland, John B. 1993. Anchoring, Iconicity, and Orientation in Guugu Yimithirr Pointing Gestures. Journal of Linguistic Anthropology 3: 3–45. [Google Scholar] [CrossRef]
- Haviland, John B. 1996. Projections, Transpositions, and Relativity. In Rethinking Linguistic Relativity. Edited by John Gumperz and Stephen C. Levinson. Cambridge: Cambridge University Press, pp. 271–323. [Google Scholar]
- Haviland, John B. 2003. How to Point in Zinacantán. In Pointing: Where Language, Culture, and Cognition Meet. Edited by Sotaro Kita. Mahwah: Lawrence Erlbaum, pp. 139–69. [Google Scholar]
- Hou, Lynn Yong-Shi. 2016. ‘Making Hands’: Family Sign Languages in the San Juan Quiahije Community. Ph.D. thesis, The University of Texas at Austin, Austin, TX, USA. [Google Scholar]
- Johnson, Robert E. 1991. Sign Language, Culture and Community in a Traditional Yucatec Maya Village. Sign Language Studies 73: 461–74. [Google Scholar] [CrossRef]
- Kisch, Shifra. 2012. Demarcating Generations of Signers in the Dynamic Sociolinguistic Landscape of a Shared Sign-Language: The Case of the Al-Sayyid Bedouin. In Endangered Sign Languages in Village Communities: Anthropological and Linguistic Insights. Edited by Ulrike Zeshan and Connie de Vos. Berlin: Mouton de Gruyter & Ishara Press, pp. 87–125. [Google Scholar]
- Klima, Edward, and Ursula Bellugi. 1979. The Signs of Language. Cambridge: Harvard University Press. [Google Scholar]
- Kocab, Annemarie, Ann Senghas, and Jennie Pyers. 2022. From Seed to System: The Emergence of Non-Manual Markers for Wh-Questions in Nicaraguan Sign Language. Languages 7: 137. [Google Scholar] [CrossRef]
- Le Guen, Olivier. 2011a. Modes of Pointing to Existing Spaces and the Use of Frames of Reference. Gesture 11: 271–307. [Google Scholar] [CrossRef]
- Le Guen, Olivier. 2011b. Speech and Gesture in Spatial Language and Cognition Among the Yucatec Mayas. Cognitive Science 35: 905–38. [Google Scholar] [CrossRef]
- Le Guen, Olivier. 2012. An Exploration in the Domain of Time: From Yucatec Maya Time Gestures to Yucatec Maya Sign Language Time Signs. In Endangered Sign Languages in Village Communities: Anthropological and Linguistic Insights. Edited by Ulrike Zeshan and Connie de Vos. Berlin: Mouton de Gruyter & Ishara Press, pp. 209–50. [Google Scholar]
- Le Guen, Olivier, Rebeca Petatillo Balam, and Rita (Rossy) Kinil Canché. 2020. Yucatec Maya Multimodal Interaction as Basis for Yucatec Maya Sign Language. In Emerging Sign Languages of the Americas. Edited by Olivier Le Guen, Josefina Safar and Marie Coppola. Sign Language Typology [SLT]. Berlin and Boston: De Gruyter Mouton, pp. 287–348. [Google Scholar]
- Levinson, Stephen C. 2003. Space in Language and Cognition: Explorations in Cognitive Diversity. Language, Culture and Cognition; 5. Cambridge: Cambridge University Press. [Google Scholar]
- Liddell, Scott K. 2003. Grammar, Gesture, and Meaning in American Sign Language. Cambridge: Cambridge University Press. [Google Scholar]
- Lillo-Martin, Diane, and Edward Klima. 1990. Pointing out Differences: ASL Pronouns in Syntactic Theory. In Theoretical Issues in Sign Language Research, Vol. 1: Linguistics. Edited by Susan Fischer and Patricia Siple. Chicago: Chicago University Press, pp. 191–210. [Google Scholar]
- Lillo-Martin, Diane, and Richard P. Meier. 2011. On the Linguistic Status of ‘Agreement’ in Sign Languages. Theoretical Linguistics 37: 95–142. [Google Scholar] [CrossRef]
- Macdougall, J. Paige. 2012. Being Deaf in a Yucatec Maya Community: Communication and Identity Negotiation. Ph.D. thesis, McGill University, Montreal, QC, USA. [Google Scholar]
- Marsaja, I. Gede. 2008. Desa Kolok: A Deaf Village and Its Sign Language in Bali, Indonesia. Nijmegen: Ishara Press. [Google Scholar]
- Mathur, Gaurav, and Christian Rathmann. 2012. Verb Agreement. In Sign Language: An International Handbook. Edited by Roland Pfau, Markus Steinbach and Bencie Woll. Amsterdam: De Gruyter Mouton, pp. 136–57. [Google Scholar] [CrossRef]
- McNeill, David. 2003. Pointing and Morality in Chicago. In Pointing: Where Language, Culture and Cognition Meet. Edited by Sotaro Kita. Mahwah: Erlbaum, pp. 293–306. [Google Scholar]
- McNeill, David, Justine Cassell, and Elena T. Levy. 1993. Abstract Deixis. Semiotica 95: 5–20. [Google Scholar] [CrossRef]
- Meier, Richard P. 2002. The Acquisition of Verb Agreement: Pointing out Arguments for the Linguistic Status of Agreement in Signed Languages. Directions in Sign Language Acquisition 7: 115–41. [Google Scholar]
- Meir, Irit. 1998. Syntactic-Semantic Interaction in Israeli Sign Language Verbs: The Case of Backwards Verbs. Sign Language & Linguistics 1: 3–37. [Google Scholar] [CrossRef]
- Meir, Irit. 2002. A Cross-Modality Perspective On Verb Agreement. Natural Language & Linguistic Theory 20: 413–50. [Google Scholar] [CrossRef]
- Meir, Irit, and Wendy Sandler. 2008. A Language in Space: The Story of Israeli Sign Language. New York: Lawrence Erlbaum Associates. [Google Scholar]
- Meir, Irit, Carol A. Padden, Mark Aronoff, and Wendy Sandler. 2007. Body as Subject. Journal of Linguistics 43: 531–63. [Google Scholar] [CrossRef] [PubMed]
- Meir, Irit, Wendy Sandler, Carol A. Padden, and Mark Aronoff. 2010. Emerging Sign Languages. In The Oxford Handbook of Deaf Studies, Language, and Education, Volume 2. Edited by Marc Marschark, Patricia Elizabeth Spencer and Peter E. Nathan. Oxford: Oxford University Press, pp. 267–80. [Google Scholar]
- Montemurro, Kathryn, Molly Flaherty, Marie Coppola, Susan Goldin-Meadow, and Diane Brentari. 2019. Grammaticalization of the Body and Space in Nicaraguan Sign Language. In Proceedings of the 43rd Boston University Conference on Language Development. Edited by Megan M. Brown and Brady Dailey. Somerville: Cascadilla Press, pp. 415–26. [Google Scholar]
- Morford, Jill P., and Judy Kegl. 2000. Gestural Precursors of Linguistic Constructs: How Input Shapes the Form of Language. In Language and Gesture. Edited by David McNeill. Cambridge: Cambridge University Press, pp. 358–87. [Google Scholar]
- Newport, Elissa L. 1990. Maturational Constraints on Language Learning. Cognitive Science 14: 11–28. [Google Scholar] [CrossRef]
- Padden, Carol A. 1983. Interaction of Morphology and Syntax in American Sign Language. Ph.D. dissertation, University of California, San Diego, CA, USA. [Google Scholar]
- Padden, Carol A., Irit Meir, Wendy Sandler, and Mark Aronoff. 2009. Against All Expectations: Encoding Subjects and Objects in a New Language. In Hypothesis A/Hypothesis B: Linguistic Explorations in Honor of David M. Perlmutter. Edited by D. Gerdts, J. Moore and M. Polinsky. Cambridge: MIT Press, pp. 383–400. [Google Scholar]
- Padden, Carol A., Irit Meir, Mark Aronoff, and Wendy Sandler. 2010. The Grammar of Space in Two New Sign Languages. In Sign Languages: A Cambridge Language Survey. Edited by D. Brentari. Cambridge: Cambridge University Press, pp. 570–92. [Google Scholar]
- Rathmann, Christian, and Gaurav Mathur. 2008. Verb Agreement as a Linguistic Innovation in Signed Languages. In Signs of the Time: Selected Papers from TISLR 2004. Edited by Josep Quer. Hamburg: Signum Press, pp. 191–216. [Google Scholar]
- Safar, Josefina. 2017. Translanguaging in Yucatec Maya Signing Communities. Applied Linguistics Review 10: 31–53. [Google Scholar] [CrossRef]
- Safar, Josefina. 2019. ‘When You Were That Little…’: From Yucatec Maya Height-Specifier Gestures to Yucatec Maya Sign Language Person-Classifier Signs. Gesture 18: 1–40. [Google Scholar] [CrossRef]
- Safar, Josefina, and Olivier Le Guen. 2020. Yucatec Maya Sign Language: A Sociolinguistic Overview. In Emerging Sign Languages of the Americas. Edited by Olivier Le Guen, Josefina Safar and Marie Coppola. Sign Language Typology [SLT]. Berlin and Boston: De Gruyter Mouton. [Google Scholar]
- Safar, Josefina, and Rodrigo Petatillo Chan. 2020. Strategies of Noun-Verb Distinction in Yucatec Maya Sign Languages. In Emerging Sign Language of the Americas. Edited by Olivier Le Guen, Josefina Safar and Marie Coppola. Sign Language Typology [SLT]. Berlin and Boston: De Gruyter Mouton. [Google Scholar]
- Safar, Josefina, Olivier Le Guen, Geli Collí Collí, and Merli Collí Hau. 2018. Numeral Variation in Yucatec Maya Sign Languages. Sign Language Studies 18: 488–516. [Google Scholar] [CrossRef]
- Sandler, Wendy, Irit Meir, Carol A. Padden, and Mark Aronoff. 2005. The Emergence of Grammar: Systematic Structure in a New Language. Proceedings of the National Academy of Sciences of the United States of America 102: 2661–65. [Google Scholar] [CrossRef]
- Schegloff, Emanuel A. 1984. On Some Gestures’ Relation to Speech. In Structures of Social Action: Studies in Conversation Analysis. Edited by J. Atkinson and John Heritage. Cambridge: Cambridge University Press, pp. 266–96. [Google Scholar]
- Schuit, Joke. 2012. Signing in the Arctic: External Influences on Inuit Sign Language. In Endangered Sign Languages in Village Communities: Anthropological and Linguistic Insights. Edited by Ulrike Zeshan and Connie de Vos. Berlin: Mouton de Gruyter & Ishara Press, pp. 181–208. [Google Scholar]
- Schuit, Joke. 2014. Signs of the Arctic: Typological Aspects of Inuit Sign Language. Sign Language & Linguistics 17: 276–84. [Google Scholar]
- Schuit, Joke, Anne Baker, and Roland Pfau. 2011. Inuit Sign Language: A Contribution to Sign Language Typology. Linguistics in Amsterdam 4: 1–31. [Google Scholar]
- Senghas, Ann. 2003. Intergenerational Influence and Ontogenetic Development in the Emergence of Spatial Grammar in Nicaraguan Sign Language. Cognitive Development 18: 511–31. [Google Scholar] [CrossRef]
- Senghas, Ann. 2005. Language Emergence: Clues from a New Bedouin Sign Language. Current Biology: CB 15: R463–R65. [Google Scholar] [CrossRef]
- Senghas, Ann, and Marie Coppola. 2001. Children Creating Language: How Nicaraguan Sign Language Acquired a Spatial Grammar. Psychological Science 12: 323–28. [Google Scholar] [CrossRef] [PubMed]
- Senghas, Ann, Sotaro Kita, and Asli Özyürek. 2004. Children Creating Core Properties of Language: Evidence from an Emerging Sign Language in Nicaragua. Science 305: 1779–82. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Senghas, Richard J., Ann Senghas, and Jennie E. Pyers. 2005. The Emergence of Nicaraguan Sign Language: Questions of Development, Acquisition, and Evolution. In Biology and Knowledge Revisited: From Neurogcnesis to Psychogenesis. Edited by J. Langer, S. T. Parker and C. Milbrath. Mahwah: Erlbaum, pp. 287–306. [Google Scholar]
- Tuz Baas, José Alfredo. forthcoming. Preferencias En El Uso de Marcos de Referencia Espaciales Entre Los Usuarios Sordos y Bilingües de La Lengua de Señas Maya Yucateca. B.A., Valladolid, YUc. Mexico: Universidad de Oriente.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chicán | Nohkop * | Trascorral | |
|---|---|---|---|
| Number of inhabitants | 720 (Escobedo Delgado 2012) | No exact figure (around 30) | ~300 |
| Number of deaf people | 16 | 4 | 6 |
| Percentage of deaf people | ~2.4% (Escobedo Delgado 2012) | No exact figure | ~2% |
| Age of deaf people in 2021 | 18–69 | 20–28 | 11–33 |
| Gender distribution of deaf people | 8 female, 9 male | 3 female, 1 male | 2 female, 4 male |
| Family distribution of deaf people | Multiple families | Siblings of one family (family of 5 siblings) | Siblings of one family (family of 13 siblings) |
| Community | Participant | Age in 2021 | Gender | Generation | Deaf/Hearing | Data Collection Year |
|---|---|---|---|---|---|---|
| Chicán | JCC | 69 | M | 1st | Deaf | 2011 |
| NCT | 51 | F | 1st | Deaf | 2013 | |
| MlCC | 23 | F | 2nd | Deaf | 2011 | |
| CaCC | 19 | M | 2nd | Deaf | 2011 | |
| StCC | 59 | M | 1st | Deaf | 2013 | |
| GUC | 34 | M | 1st | Deaf | 2013 | |
| MCH | 18 | F | 2nd | Hearing CODA (BB) | 2013 | |
| MCC | 66 | F | 1st | Deaf | 2013 | |
| LTP | 31 | F | 1st | Deaf | 2011 | |
| BTP | 29 | F | 1st | Deaf | 2013 | |
| RTP | 23 | M | 1st | Deaf | 2013 | |
| ACC | 50 | M | 1st | Deaf | 2011 | |
| ECC | 48 | F | 1st | Deaf | 2011 | |
| LCC | 40 | F | 1st | Deaf | 2011 | |
| Nohkop | YKP | 29 | F | 1st | Deaf | 2011 |
| WKP | 16 | M | 1st | Deaf | 2011 | |
| NKP | 27 | F | 1st | Deaf | 2012 | |
| MKP | 22 | F | 1st | Deaf | 2021 | |
| RKP | 23 | F | 1st | Hearing (BB) | 2014 | |
| JSK | 6 | F | 2nd | Hearing CODA (BB) | 2021 | |
| Trascorral | CMM | 33 | F | 1st | Deaf | 2021 |
| MM | 14 | F | 1st | Deaf | 2021 | |
| LMM | 14 | F | 2nd | Hearing CODA (BB) | 2021 |
| GR.1 (N = 4) | GR.2 (N = 6) | GR.3 (N = 4) | ||||
|---|---|---|---|---|---|---|
| # | % | # | % | # | % | |
| Uninflected | 46 | 95.8 | 7 | 9.9 | 0 | 0 |
| Single VA | 1 | 2.1 | 55 | 77.5 | 0 | 0 |
| Double VA | 1 | 2.1 | 9 | 12.7 | 48 | 100 |
| Total Number of Signers | Number of Generations | Age of the Sign Language (Aprox.) | Preferred FoR | Use of the Signing Space for Agreement | |
|---|---|---|---|---|---|
| Kata Kolok | 46 | 6 | 120? | Geocentric | NO |
| Al Sayyid SL | 125 | 3 | 70 | Geocentric? | NO |
| Nicaragua SL | 800 | 3 | 25 | ? | NO-YES |
| Inuit SL | >40 | 1 | 60 | Geocentric | YES |
| YMSL | 16/4 | 2 | 80/20 | Geocentric | YES |
| Israeli SL | 10,000 | 3 | 90 | Egocentric? | YES |
| Danish SL | 5000 | 2 | 200 | Egocentric? | YES |
| ASL | 250,000–500,000 | more than 8 | 200 | Egocentric | YES |
 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le Guen, O. Early Emergence of Agreement in Yucatec Maya Sign Language. Languages 2022, 7, 233. https://doi.org/10.3390/languages7030233
Le Guen O. Early Emergence of Agreement in Yucatec Maya Sign Language. Languages. 2022; 7(3):233. https://doi.org/10.3390/languages7030233
Chicago/Turabian StyleLe Guen, Olivier. 2022. "Early Emergence of Agreement in Yucatec Maya Sign Language" Languages 7, no. 3: 233. https://doi.org/10.3390/languages7030233
APA StyleLe Guen, O. (2022). Early Emergence of Agreement in Yucatec Maya Sign Language. Languages, 7(3), 233. https://doi.org/10.3390/languages7030233