Abstract
Achieving a fast and safe takeoff procedure for UAV swarms poses significant challenges, particularly when the target aerial formation is linear. In such formations, UAVs often follow overlapping paths, which increases collision risks or forces the use of overly conservative strategies that prolong takeoff time. To address these issues, this study investigates how attraction–repulsion mechanisms can accelerate the takeoff phase while ensuring safety through fully distributed control. We evaluate five takeoff methods—Sequential, Staggered, Simultaneous, Simultaneous with Magnetic Repulsion (M1), and Simultaneous with Magnetic Repulsion and Dispersion (M2)—under two initial ground setups (Matrix and Random) and varying swarm sizes. The primary objective is to achieve low takeoff times when targeting linear aerial formations while maintaining operational safety. Using a simulation-based approach with controlled environmental conditions, total takeoff time and safety (measured as episodes where UAVs violate a predefined separation distance) were analyzed. Results confirm that simultaneous strategies substantially reduce takeoff time, whereas the proposed repulsion- and dispersion-based mechanisms significantly mitigate conflicts in dense deployments. Overall, the study highlights a practical trade-off between speed and safety and shows that the proposed M2 mechanism offers an efficient and robust solution for organizing UAV swarms into linear formations.
1. Introduction
Unmanned aerial vehicles (UAVs) are increasingly being deployed across diverse application domains—ranging from precision agriculture and environmental monitoring to emergency response and infrastructure inspection—because of their versatility, cost-efficiency, and ability to access hazardous or remote environments that are otherwise difficult to reach [1,2]. With the rise of cooperative multi-UAV systems (swarms), mission complexity has grown significantly, placing new demands on coordination, autonomy, and safety. Medium- to large-scale UAV swarms, in the range of 15–25 agents or beyond, arise naturally in several operational domains. Examples include (i) post-disaster rapid mapping missions, in which fleets of UAVs can be launched simultaneously to survey large affected regions in minimal time [3,4]; (ii) environmental monitoring campaigns—such as coastline inspection, wildfire perimeter tracking [5], where missions benefit from deploying 20+ units in parallel to maximize spatial coverage; and (iii) security and infrastructure operations, where coordinated inspection of long linear assets (pipelines, power lines, or rail corridors) is performed by swarms exceeding 15 UAVs [6]. In all these scenarios, fast and safe collective takeoff is essential because deployment time strongly impacts mission effectiveness, and there is typically limited safe airspace near the ground. In this context, the takeoff phase of a UAV swarm, encompassing the entire process from the time the UAVs depart from their ground positions until they reach their target position, defined according to the swarm formation, is critical since it sets the foundation for formation coherence, collision avoidance, and overall mission efficiency. However, it presents a critical operational bottleneck due to the limited battery lifetime these flying artifacts typically offer.
Achieving a fast and safe takeoff becomes particularly challenging when the desired aerial formation diverges from the ground deployment layout, requiring more maneuvers than a mere vertical takeoff. This difficulty is amplified when the target formation is linear, since UAVs tend to follow overlapping ascent and transition paths, substantially increasing collision risks. More conservative strategies can mitigate these risks but often lead to excessive delays (especially in large swarms or when ground deployment is dense or irregular [7]). Despite extensive research on formation control and in-flight coordination, comparatively little attention has been devoted to the takeoff phase itself, even though it exerts a disproportionate influence on both takeoff time and operational safety. These challenges motivate the search for takeoff algorithms that balance speed with robust collision-avoidance mechanisms.
Existing takeoff strategies typically fall into two paradigms. Sequential deployment, in which UAVs ascend one at a time, maximizes safety but results in long startup durations. Simultaneous deployment greatly reduces takeoff time, but increases the risk of collisions as UAVs ascend and maneuver in close proximity. To overcome such issues, this work introduces two novel methods that leverage the Directional Force Field Protocol (D-FFP [8]), a decentralized UAV swarm control protocol that uses direction-dependent repulsion to prioritize collision avoidance along each agent’s flight path, reducing unnecessary maneuvers and improving coordinated swarm movement. The first method enhances the simultaneous deployment baseline by integrating repulsion during the maneuvers, while the second adds a pre-dispersion step to reduce initial adjacency before movement toward the final formation. These mechanisms are designed to accelerate the takeoff procedure while maintaining a distributed structure with low computational complexity.
The primary objective of this study is to develop and evaluate algorithms that optimize the takeoff process of UAV swarms under realistic operational constraints. Specifically, the work aims to (i) implement a repulsion-integrated simultaneous takeoff method, (ii) design a hybrid approach combining spatial dispersion with force-field-guided ascent, and (iii) assess their performance against traditional strategies across varying swarm sizes and initial deployments. Experimental results obtained through systematic simulations show that the proposed mechanisms substantially accelerate the takeoff procedure—achieving times close to those of simultaneous takeoff—while maintaining collision risk at levels comparable to sequential deployment. Overall, the findings demonstrate that these new methods offer fast, safe, and practically deployable solutions for organizing UAV swarms into target formations, particularly linear ones.
The remainder of this paper is organized as follows. Section 2 reviews the relevant literature on UAV swarm coordination, takeoff strategies, and force-field-based control methods, highlighting the gap addressed by this study. Section 3 presents the proposed Takeoff Methods, both previous and proposed Approaches, detailing the nature-inspired control scheme and the novel intermediate strategies. Section 4 then describes the Experimental Setup and Methodology, outlining the simulation environment, defined scenarios, and evaluation metrics. Section 5 reports the experimental results, analyzes trends in takeoff time, path length and safety, and discusses the implications of initial formations and swarm sizes. A brief discussion of the results achieved and insights gained from this work is provided in Section 6. Finally, Section 7 concludes the paper and outlines directions for future research to further enhance UAV swarm takeoff operations.
2. Related Work
The efficient and safe deployment of UAV swarms is a rapidly evolving area of research, primarily concerning two distinct but interdependent challenges: coordinated formation control and robust collision avoidance under strict time constraints. Our study focuses on the critical initial phase—simultaneous swarm takeoff—which bridges these two areas under high-density constraints.
The existing literature can be categorized into three main themes: fundamental multi-agent control for formation maintenance (Section 2.1), sophisticated collision avoidance mechanisms (Section 2.2), and, most relevantly, integrated take-off and scheduling strategies (Section 2.3).
2.1. Swarm Formation and Maintenance Strategies
The foundation of any successful swarm operation is a robust Multi-Agent System (MAS) control architecture that can reliably achieve formation goals.
Earlier work by Agrawal et al. [9], establishes the necessary decentralized consensus-based control for combining formation, waypoint following, and general obstacle avoidance. Expanding upon this, the study by Fu et al. [10] directly addresses the issue of formation maintenance and transformation. This method uses consistency control laws between individual UAVs and a virtual leader to manage both position and speed. It further integrates the Artificial Potential Field (APF) method for basic obstacle avoidance, and utilizes the Consensus-Based Bundle Algorithm (CBBA) to flexibly re-allocate positions during formation transformation.
Recent studies have advanced multi-UAV formation control by addressing limitations of traditional APF and leader-follower approaches. Li et al. [11] propose an improved APF integrated with consensus control, overcoming local minima and accelerating formation convergence in dense, unknown environments. Zhang et al. [12] develop dynamic reconfiguration strategies for leader-follower swarms, including leader election and follower detachment mechanisms, ensuring swarm cohesion despite agent losses or communication failures. Zhu et al. [13] introduce CMUFC, which adapts formation topology and employs a speed-based APF to maintain connectivity and safely navigate obstacle-rich environments. These works collectively demonstrate the state-of-the-art in distributed control for in-flight maneuvers and obstacle handling; yet, they typically treat the initial swarm deployment phase as an auxiliary problem, not the primary safety challenge.
2.2. Real-Time Collision Avoidance and Trajectory Optimization
The safety constraint in dense flight necessitates sophisticated conflict resolution mechanisms. Basic reactive approaches, like the emergency control algorithm proposed in [7], focus on defining sufficient conditions and using a conflict buffer to switch between safe and danger modes. Proactive methods, such as the predictive control used in [14], integrate safety into trajectory planning, even under complex constraints. A significant advancement is seen in [15], which applies Artificial Intelligence (AI) techniques for trajectory generation. This work introduces an Integrated Collision Detection, Avoidance, and Batching (ICDAB) strategy. This strategy cleverly merges two complementary techniques: changing UAV trajectories and altering their starting times (batching). By integrating these, it seeks to reduce complex path manipulations and minimize the overall takeoff time, addressing the very trade-off between path complexity (safety) and time efficiency (speed) that is central to our work. However, the use of AI for prediction introduces computational complexity that may be difficult to implement in simple, distributed systems for immediate ground maneuvers.
Shi et al. [16] propose a real-time UAV trajectory planning method combining deep reinforcement learning with adaptive nonlinear MPC, improving control accuracy, response speed, and obstacle avoidance in dynamic environments. Madabushi et al. [17] focus on close-proximity control of UAV swarms using receding horizon NMPC, maintaining safety within bounded trajectories and enabling highly dynamic maneuvers. While these studies advance collision avoidance and trajectory optimization, they assume UAVs are already airborne, leaving high-density simultaneous takeoff largely unaddressed.
2.3. Integrated Take-Off Management and Scheduling
The most direct comparison to our study’s focus on the initial deployment phase comes from research on integrated take-off scheduling. The work on [18] is highly relevant, although focused on Urban Air Mobility (UAM) and large-scale eVTOL (electric Vertical Take-Off and Landing) aircraft. This work proposes a Hierarchical Coordinated Take-off and Merging Management (HCTMM) strategy which includes a novel take-off airspace design. The strategy operates at tactical (scheduling take-off times) and operational (trajectory optimization) levels to strictly ensure safety and efficiency during the initial take-off and merging phases into a high-traffic corridor. The core idea is to manipulate take-off times and merging points to manage conflict. While [15,18] directly address takeoff time overheads by optimizing scheduling/batching (the temporal dimension), they ultimately default to sequential or staggered deployment to ensure safety.
Zheng et al. [19] propose a unified framework for UAV fleet deployment in last-mile delivery, integrating strategic depot location, fleet allocation, and operational scheduling. Using deterministic, stochastic (SAA), and robust optimization models, their approach balances cost, service reliability, and UAV availability under uncertain demand. While focused on delivery logistics, it highlights the importance of combining strategic and operational decisions for efficient UAV operations. However, like other takeoff management studies, it generally assumes UAVs are already in operation, leaving the simultaneous high-density takeoff phase—the focus of our work—largely unexplored.
Existing literature effectively handles in-flight formation [14], reactive collision avoidance [9,20], and temporal scheduling for deployment [15,18]. However, a clear solution for achieving a truly simultaneous (zero time delay) takeoff for a dense swarm from an arbitrary ground formation, while maintaining collision safety, is lacking. Pure simultaneous lift-off is unsafe (as shown by our Sequential vs. Simultaneous comparison), and optimization methods [15,18], achieve safety by re-introducing a time penalty via scheduling/batching. This gap highlights the need for decentralized strategies capable of balancing speed and safety without relying solely on temporal deconfliction mechanisms.
Our work addresses this critical gap by investigating takeoff procedures adopting the Simultaneous with Magnetic Repulsion and Dispersion (M1 and M2) method. This approach maintains the minimal time overhead of a simultaneous takeoff strategy by using a bio-inspired, cooperative pre-emptive repulsion mechanism to manage the high-density conflict during the initial vertical ascent, rather than relying on delayed scheduling or complex, large-scale trajectory prediction. This provides a decentralized, low-computation solution that resolves the fundamental trade-off between deployment speed and immediate swarm safety.
3. Takeoff Methods
This section introduces the five takeoff methods evaluated in this study: three conventional baselines (Sequential, Simultaneous and Staggered) and two novel algorithms based on the D-FFP (M1 and M2). The primary goal of the new methods is to mitigate the inherent collision risks associated with simultaneous takeoff while substantially preserving its speed advantages.
Before describing the five evaluated takeoff strategies, below we provide a concise but explicit definition of the UAV platform model, its sensing and actuation capabilities, the adopted flight–control interface, and the dimensionality assumptions of the analysis.
3.1. UAV Platform Model Overview
Each UAV is modeled as a quadrotor governed by a low-level autopilot in ArduPilot SITL (Software-in-the-Loop) that receives high–level velocity commands from our controller. During takeoff, the UAV performs a 3D motion consisting of: (i) a vertical ascent phase fully simulated in 3D; and (ii) a horizontal transition phase, where altitude remains fixed at and motion is therefore described in 2D (x–y plane).
The assumed on–board sensors are: GPS (position), IMU (accelerometer + gyroscope), magnetometer (heading), and barometric altimeter (altitude). The autopilot exposes a guided mode that accepts desired velocity vectors , which are internally converted into rotor thrust and attitude setpoints. Our controller therefore does not manipulate the UAV dynamics directly; instead, it computes a desired motion vector that is saturated and sent as a high–level velocity command.
Throughout all experiments, UAV motion during the horizontal transition phase is modeled as a 3-DoF planar system over a fixed-altitude surface. Vertical motion is fully simulated only during takeoff and landing, while the horizontal D-FFP guidance operates on a constant-altitude layer at . This makes the analysis effectively 2D for the formation-reorganization stage, while preserving realistic 3D dynamics during ascent.
Neighbor detection relies on ad–hoc wireless communication with periodic broadcast messages at 10 Hz. The simulator assumes negligible latency and no packet loss. Each UAV maintains a local table containing the most recently received positions of neighbors within a 60 m radius for D-FFP calculations.
3.2. Baseline Methods
Sequential Takeoff: In this strategy, UAVs lift off one at a time in a predefined order, ensuring maximum spatial separation and minimizing collision risk. The method is highly safe and robust to delays or actuator variability, but its main drawback is the long takeoff time, which scales linearly with the swarm size. This is illustrated in Figure 1.
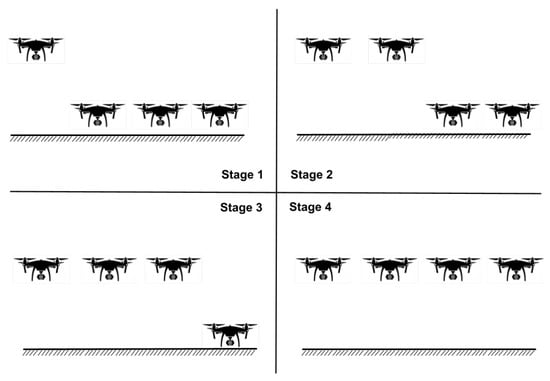
Figure 1.
Sequential takeoff: UAVs ascend one at a time, ensuring maximum spatial separation and minimizing early-stage conflicts.
Simultaneous Takeoff: In this strategy, all UAVs ascend at the same time toward their assigned positions, achieving the shortest possible takeoff time. However, the lack of temporal separation greatly increases collision risk, especially when initial spacing is small or when UAV trajectories intersect. This is illustrated in Figure 2.
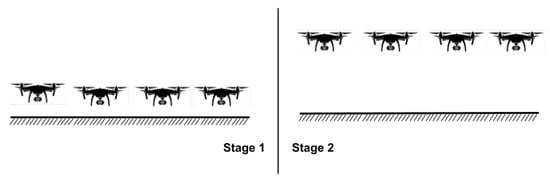
Figure 2.
Simultaneous takeoff: all UAVs ascend concurrently toward their assigned formation slots, minimizing total time at the cost of increased collision risk.
Staggered takeoff: This strategy is a combination of the previous two, whereby UAVs takeoff in groups. For our particular target formation (linear), these will be groups of two UAVs, so that they move in opposite directions, as illustrated in Figure 3. This is the basic requirement to minimize collision risks.
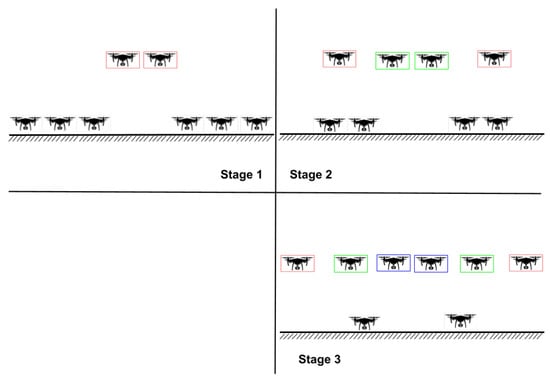
Figure 3.
Staggered takeoff: UAVs take off in pairs (represented by boxes of the same color) moving in opposite directions, reducing trajectory overlap relative to fully simultaneous ascent.
3.3. Proposed Methods
To overcome the safety limitations of Simultaneous Takeoff, we introduce two novel strategies (M1 and M2) based on the Directional Force Field Protocol (D-FFP). D-FFP extends the classical Force Field Protocol (FFP) [21], where each UAV responds to attractive and repulsive virtual forces. While FFP uses omnidirectional repulsion, D-FFP concentrates repulsion in the UAV’s forward direction, improving collision avoidance in dense, dynamic environments.
In D-FFP the heading of the UAV will always point toward the direction of its movement, so the directional property of the force field radiation will also match this heading. An example of this radiation pattern is represented in Figure 4, where the speed vector represents the heading and movement of the UAV.
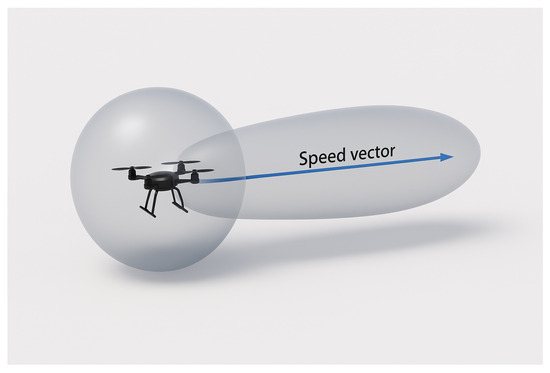
Figure 4.
Three-dimensional directional radiation pattern used in the D-FFP repulsion mechanism, where frontal repulsion is emphasized to mitigate conflicts along the movement direction.
The full motion command issued by our controller is defined as:
where is the attractive force toward the assigned waypoint, is the repulsive force induced by neighbor j, denotes the set of detected neighbors, and is a velocity–saturation operator ensuring .
The attractive force is given by
with , current position , and target position .
For each neighbor j, the repulsive force is:
where points away from neighbor j, is the inter-UAV distance, is a decreasing function active only for , and is the angular directional gain defined in Equation (4).
3.3.1. Method 1: Simultaneous Deployment with Directional Force Field (M1)
This method enhances the Simultaneous baseline by integrating D-FFP from the moment all UAVs reach the safe altitude.
The complete algorithmic description of M1 is provided in Algorithm 1.
| Algorithm 1 Method 1 (M1): Simultaneous Takeoff with D-FFP |
|
The operational steps of M1 remain as originally described, but the above algorithm clarifies how the attractive and repulsive fields are computed, combined, saturated, and transmitted to the autopilot.
3.3.2. Method 2: Deployment with Spatial Dispersion and Directional Force Field (M2)
This method extends M1 by introducing a spatial–dispersion phase designed to reduce high-density conflicts early in the maneuver. Before converging to their final linear-formation slots, UAVs move toward intermediate dispersion waypoints that intentionally increase separation and angular diversity (see Figure 5).
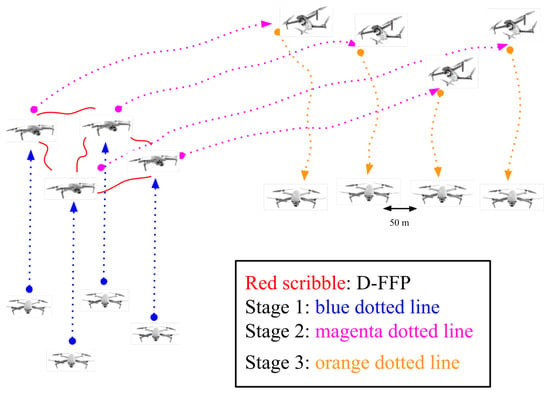
Figure 5.
Illustration of the M2 approach combining initial vertical ascent, a dispersion phase leading to intermediate waypoints, and final convergence to the target linear formation.
In contrast to M1, which relies solely on repulsion during the post-takeoff horizontal transition, M2 proactively reshapes the initial configuration by driving the swarm through a geometrically defined detour. This improves flow regularity, reduces sharp repulsion spikes, and prevents multi-UAV bottlenecks.
Algorithm 2 provides a complete pseudo-code description of the control loop, complementing the reviewer request for implementation clarity.
| Algorithm 2 Method 2 (M2): Spatial Dispersion + D-FFP |
|
In M2, each UAV follows a three-stage trajectory. First, a vertical takeoff (blue trajectory) brings all UAVs to a fixed safe altitude. Next, D-FFP remains active while each UAV heads toward its assigned intermediate dispersion point (magenta trajectory), computed using the geometrical construction described below. Finally, UAVs transition from these dispersed locations to their final slots (orange trajectory), maintaining D-FFP activation until formation error falls below threshold.
The dispersion geometry is defined as follows, following the nomenclature used in Table 1. Let denote the initial ground position and the final formation position of a UAV. A reference perimeter
is computed from the swarm size and a nominal spacing parameter , which refers to the target inter-UAV distance in the flight formation.

Table 1.
Nomenclature used.
Let
represent the horizontal projection of the initial displacement.
The vertical leg a of a right triangle satisfying perimeter P follows from:
which yields
The resulting perpendicular offset is
Thus, the dispersion waypoint is:
This ensures that each intermediate waypoint lies on a vertical line aligned with the final formation, but at a controlled offset that increases angular separation between UAV trajectories. This geometric construction reduces early-stage trajectory crossings, helping the D-FFP repulsion term remain within operational bounds.
Notice that this intermediate point is computed to enforce a controlled lateral spread that scales with swarm size. In particular, parameter P (Equation (5)) determines the effective “detour perimeter” and directly influences the lateral offset magnitude. Larger swarms thus receive proportionally larger dispersion radii, reducing path intersections.
Overall, M2 significantly improves collision mitigation by decoupling the swarm before the final alignment phase, and by allowing D-FFP to operate in a less congested configuration. This process improves safety, but it necessarily introduces additional flight distance and a moderate increase in maneuver time compared to M1. Thus, in constrained environments, P or must be reduced to avoid unnecessary deviation.
The operational behavior and performance implications of both M1 and M2 under different swarm sizes and ground layouts are detailed in Section 4, where we describe the simulation environment and parameter settings.
4. Experimental Setup and Methodology
A UAV swarm is modeled to perform the takeoff phase with the goal of achieving a stable linear formation when departing from arbitrary initial positions. Each UAV functions as an autonomous agent, making local decisions based on the positions of neighboring drones and its target location in the aerial formation. Collectively, the swarm exhibits coordinated behavior while maintaining scalability, fault tolerance, and operational safety [1,2,8]. The control strategy used to validate our proposed approaches is the D-FFP field-based method described in Section 3, where motion results from combining attractive forces toward the assigned waypoint (target position) and directional repulsive forces from nearby UAVs.
The simulation environment implements these principles in a discrete-time loop. At every control cycle, each UAV computes the resultant vector from attractive and repulsive forces—see Equations (2) and (3)—after which a velocity-saturation operator is applied to ensure realistic dynamics. The UAV’s heading is always aligned with its resulting motion vector. This framework provides a robust basis for evaluating takeoff strategies across controlled scenarios.
To ensure full reproducibility and methodological clarity, the following elements are explicitly defined:
4.1. UAV Platform and Control Interface
Each UAV is simulated as an ArduCopter SITL quadrotor operating in guided mode. The D-FFP controller outputs a 3D velocity command computed according to Equation (1) and constrained to . The autopilot internally translates these setpoints into thrust and attitude commands. During vertical ascent and descent, full 3D motion is simulated; during the horizontal transition phase, altitude remains fixed at , resulting in effectively 2D motion on a constant-altitude surface.
4.2. Sensors and Neighbor Awareness
Each UAV provides GPS position , inertial attitude/heading via IMU and magnetometer feedback, along with barometric altitude. Inter-UAV communication occurs through 10 Hz broadcast messages, with each UAV maintaining a neighbor table for others within a 60 m range. Entries older than 0.5 s are discarded to ensure real-time responsiveness.
4.3. Guidance Loop and Velocity Saturation
The guidance loop runs at 10 Hz. At each cycle:
- Update neighbor table,
- Compute attractive force toward the current target (either dispersion waypoint or final slot),
- Compute directional repulsion forces for all neighbors j,
- Form the combined vector via Equation (1),
- Apply velocity saturation and send command to autopilot.
Unless otherwise specified, we use m/s (horizontal) and m/s (vertical).
4.4. Waypoint and Arrival Tolerances
Arrival to an intermediate waypoint (M2) is declared when with m; notice that refers to the generic target of the waypoint, which can be or . I . Final-slot arrival is declared when the error drops below m. These tolerances influence both total takeoff time and the likelihood of near-encounter events, and therefore are reported explicitly.
4.5. Directional Repulsion Parameters
Unless otherwise stated, directional repulsion uses: m (activation distance), s−1, s−1, (frontal weighting), and (minimum omnidirectional gain). The distance-decay profile is . Slope values were tested during calibration, and the best-performing configuration was fixed for all experiments.
4.6. Simulation Environment
The experiments were conducted using ArduSim [22], a real-time flight simulator designed for multi-UAV coordination studies. The UAV dynamics in our simulation are provided by the ArduPilot Software-in-the-Loop (SITL) environment, which includes a built-in Flight Dynamics Model (FDM) that integrates actuator commands into full 3-D vehicle motion and sensor outputs. The SITL platform has been widely used and validated in the scientific literature, including controlled experiments with ArduPilot’s dynamic model [23], as well as comparative evaluations of SITL’s dynamic fidelity for multicopters [24,25].
ArduSim executes one SITL process per UAV and provides a multi-agent layer that runs the D-FFP controller and communication threads. Velocity commands are inserted through the guided-mode API at 10 Hz. A synchronization barrier enforces that all UAVs finish each stage of the takeoff procedure (e.g., dispersion → formation alignment) before advancing to the next phase, guaranteeing repeatability across runs. Mobility traces sampled at 10 Hz are exported for post-processing of trajectories, safety events, and path-length metrics.
This environment has been validated in prior work [8,26] for multi-agent formation control and tactical conflict management. It enables consistent, reproducible evaluation of takeoff strategies across diverse initial configurations.
External perturbations such as wind are intentionally omitted to establish a controlled baseline for fair comparison across takeoff methods. These experiments focus on isolating the intrinsic behavior of each strategy without confounding environmental variability. Robustness to wind and other disturbances will be addressed in future work.
4.7. Defined Experiments and Scenarios
The main controlled factors in our evaluation are:
- Takeoff Method: Sequential, Simultaneous, Staggered, M1, and M2.
- Swarm Size: .
- Ground Deployment: Random or Matrix (regular grid).
- Target Formation: Linear with nominal spacing m.
Environmental and operational parameters appear in Table 2. For each configuration, multiple independent trials were conducted to ensure statistical robustness.
Table 2.
Environmental and Operational Parameters (with units).
Notice that external perturbations such as wind are intentionally omitted to establish a baseline scenario for reproducibility. Future work will consider realistic disturbances.
4.8. Initial Ground Configurations
For ground deployment we do not assume the presence of precisely engineered docking structures and motion-capture or RTK systems. Instead, we address general-purpose field deployments where UAVs may not be pre-aligned or anchored to fixed launch pads. In these environments, GNSS-based localization, heterogeneous ground conditions, and motor-startup variability justify the use of a conservative minimum ground separation of 5 to 10 m. In addition, the adoption of field-force protocols further justify increasing such range to prevent large repulsion values upon protocol activation. Considering these factors, two initial UAV layouts were tested (see Figure 6):
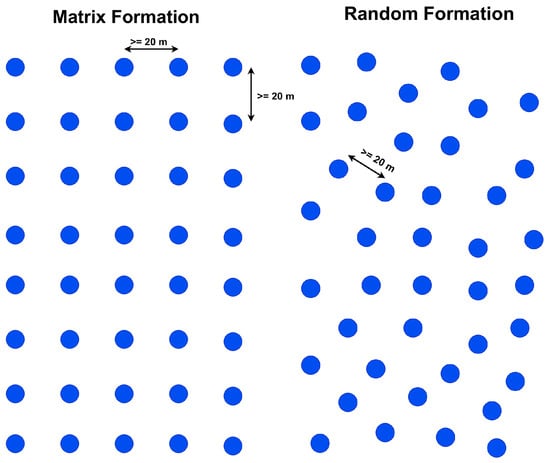
Figure 6.
Example ground deployments used in experiments: (left) matrix configuration with uniform spacing; (right) random configuration ensuring minimum ground separation.
- Random Configuration: UAVs are positioned randomly, ensuring a minimum separation of 20 m.
- Matrix Configuration: UAVs are arranged on a uniform grid with 20 m spacing between adjacent UAVs.
We have set minimum ground distances between UAVs at 20 m to prevent potential collisions during takeoff due to GPS/GNSS errors. Slot assignment is performed via a heuristic based on proximity to a central reference, minimizing unnecessary early trajectory crossings. While 25 UAVs were used in the simulations, Figure 6 shows 40 points for illustrative clarity.
4.9. Execution Environment and Coordination
Each UAV runs both the autopilot and the D-FFP controller in a decentralized manner. Neighbor tables are continuously updated, and motion commands are sent at 10 Hz. A synchronization barrier ensures orderly progression across stages. After reaching their final positions, UAVs perform a coordinated landing.
4.10. Performance Metrics
Evaluation is based on three primary metrics:
Total Takeoff Time: Time until all UAVs reach their assigned aerial formation slots.
Number of Near-collision events: Count of all episodes where inter-UAV distance falls below .
Path length: As a proxy for energy, the per-UAV average path length is
Each configuration was executed times with independent random seeds. Plots report means with ±one standard deviation as error bars. Median values were also evaluated and showed negligible deviation from the means.
5. Results and Discussion
This section presents the comparative evaluation of four UAV takeoff methods: Sequential, Simultaneous, Staggered, Simultaneous with Magnetic Repulsion (M1), and Simultaneous with Magnetic Repulsion and Dispersion (M2) under two types of initial ground setup: Matrix and Random. The main objective is to analyze how these methods perform in terms of total takeoff time and safety, measured as the number of collisions or episodes where UAVs come closer than the predefined safe distance, specifically when targeting a linear aerial formation.
Experiments were conducted for swarms of varying sizes (), applying identical environmental and communication conditions across all methods. By systematically varying the ground setup, the evaluation aims to quantify the trade-offs between speed and safety, and to identify the most effective approach for organizing UAVs into a linear formation from diverse starting setup.
The results are reported using summary statistics and graphical representations to facilitate direct comparison and to highlight trends as the swarm size increases.
5.1. Performance vs. Swarm Size
The performance of each takeoff method was evaluated as the number of UAVs in the swarm increased (). Results were analyzed separately for the two initial ground setup: Matrix and Random.
Total Takeoff Time: Figure 7 and Figure 8 show the results achieved for both deployments. We can see that the Sequential approach consistently exhibited the longest takeoff times, with time increasing approximately linearly with the number of UAVs. For example, in the Matrix setup, takeoff time rose from s at to 1305 s at . This indicates that sequential takeoff scales poorly for large swarms.
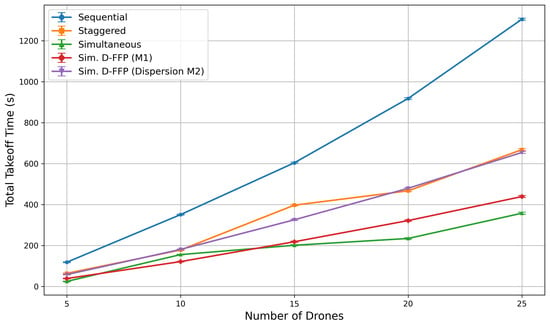
Figure 7.
Total Takeoff time vs. Swarm Size for Matrix Formation.
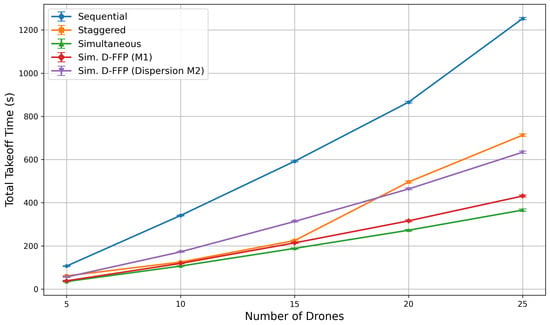
Figure 8.
Total Takeoff time vs. Swarm Size for Random Formation.
Simultaneous takeoff methods (with or without magnetic repulsion) showed significantly faster takeoff times across all swarm sizes. In the Matrix setup, standard Simultaneous takeoff required only s at and s at , with the Random setup showing similar trends.
The inclusion of magnetic repulsion (M1) slightly increased takeoff time compared to the pure Simultaneous strategy, reflecting the additional computational overhead and corrective maneuvers introduced by repulsion forces, though the increase remained modest.
Adding a dispersion phase (M2) further increased takeoff time, particularly at larger swarm sizes, as UAVs temporarily navigate to intermediate positions before forming the final line. For instance, in the Matrix formation at , time increased to 654.4 s (a similar increment can be observed for the Random formation).
Number of Collisions: As shown in Figure 9, sequential takeoff showed near-zero collisions for small swarms and modest increases for larger N (Matrix: 0 collisions at to 19 at ). Its paced procedure inherently reduced risk, much in the same way as the staggered approach. Standard Simultaneous takeoff exhibited a sharp rise in collisions with swarm size, reaching 43 collisions at in the Matrix formation, indicating poor scalability in dense deployments. Magnetic repulsion significantly reduced collision numbers compared to standard Simultaneous, demonstrating its effectiveness in maintaining minimum separation. For example, M1 had 32 collisions at (Matrix), versus 43 without repulsion. M2 further mitigated collisions, particularly for dense swarms, confirming the value of introducing intermediate spacing. In the Matrix formation at , collisions dropped to 22.
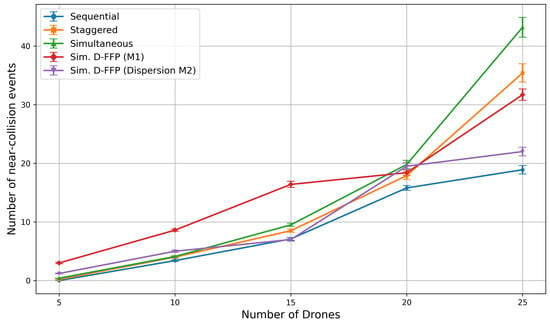
Figure 9.
Collisions vs. Swarm Size for Matrix Formation.
If we instead focus on the results achieved for the random formation (see Figure 10), we observe similar trends, although now the curves are more spaced out. This occurs because randomness in the deployment avoids repeating the same behaviors associated with having a deterministic ground pattern. Below, we further detail the differences between both deployment approaches.
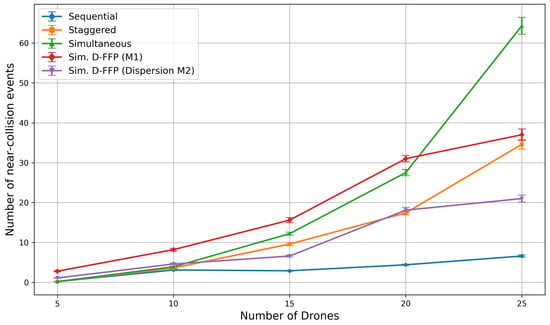
Figure 10.
Collisions vs. Swarm Size for Random Formation.
Average Path Length: Figure 11 and Figure 12 present the results concerning path length for the matrix and random ground deployment cases, respectively. It is important to notice that the results for the Sequential, Staggered and Simultaneous approaches are mostly overlapped as UAV paths do not deviate from straight routes to their target destinations, differently from the proposed M1 and M2 protocols, where different magnetic attraction and repulsion forces interact, provoking path changes. We can also see clearly that, on both figures, the M2 approach introduces greater path distances due to the added dispersion waypoints, which represent a deviation from the straight route that can rise up to 40%. Yet, as shown earlier, this additional distance will not necessarily represent a penalty in terms of total takeoff time since all UAVs are able to depart simultaneously.
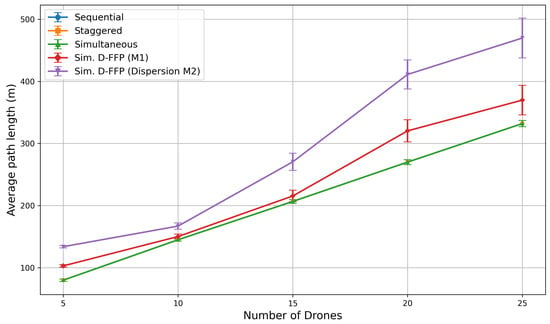
Figure 11.
Average Path Length vs. Swarm Size for Matrix Formation.
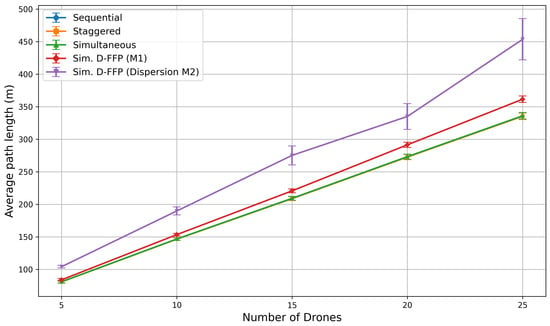
Figure 12.
Average Path Length vs. Swarm Size for Random Formation.
5.2. Comparison Between Initial Deployment Strategies
This section analyzes how the initial ground deployment (Matrix vs. Random) affects the performance of the five takeoff methods. By isolating the formation type, we can assess the influence of initial UAV spacing on both total takeoff time and safety.
Total Takeoff Time: Across all methods, Figure 13 shows that takeoff time was only slightly affected by the initial formation. Sequential takeoff times were marginally shorter in Random formations for small swarms (e.g., : 106.4 s vs. 118.3 s for Matrix) due to the naturally larger separation between UAVs, which allowed slightly faster slot assignment and ascent. For M1 and M2, differences in total time were minimal. This indicates that these methods are largely insensitive to the specific initial arrangement, as parallel ascent dominates the timing.
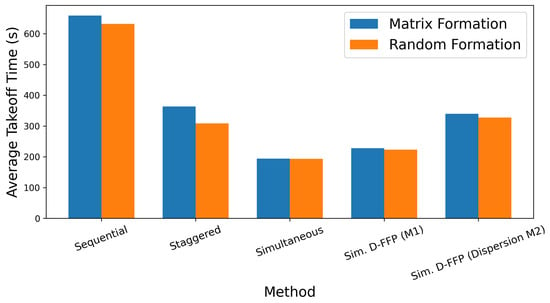
Figure 13.
Average Total takeoff time vs. ground setup.
Number of Collisions: As shown in Figure 14, the initial formation had a noticeable impact on safety, particularly for dense or simultaneous takeoff strategies. For the Sequential takeoff procedure, collisions remained low for both ground deployments, but Random formations occasionally reduced minor conflicts at small N due to more natural spacing. For the Simultaneous takeoff procedure, the Random ground deployment produced higher collision counts in large swarms (e.g., : 64 collisions vs. 43 in the Matrix layout), indicating that unpredictable local clustering can emerge in unstructured initial placements. The M1 method, which incorporates magnetic repulsion, consistently reduced collisions in both formations, with modest improvements in Random layouts for smaller swarms. The M2 method achieved the lowest collision counts across all conditions, demonstrating that the dispersion phase effectively mitigates the risks associated with initial crowding.
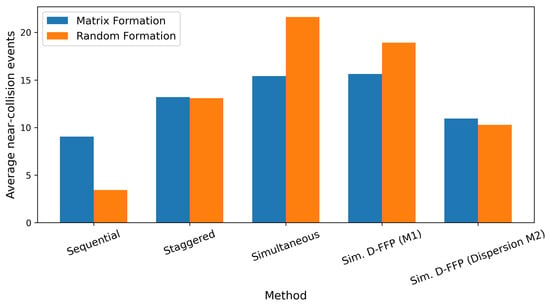
Figure 14.
Average Collision risks detected vs. ground setup.
6. Discussion
The analysis of the experimental results reveals clear trends in how different takeoff methods perform as the number of UAVs increases, as well as the trade-offs between deployment speed and safety. Sequential takeoff consistently required the longest total takeoff time, with durations increasing almost linearly as the swarm size grew from five to twenty-five drones. Despite its slower performance, Sequential maintained low collision rates across all swarm sizes and initial formations. This confirms that while the Sequential procedure is inherently safe, it is less suitable for larger swarms where operational speed is critical. In contrast, Simultaneous takeoff achieved the fastest takeoff times across all swarm sizes, aligning with the hypothesis that parallel ascent methods maximize speed. However, the collision rate for Simultaneous takeoff increased sharply with swarm size, particularly for randomly initialized formations, illustrating a clear trade-off between speed and safety. These observations support the hypothesis that methods without dedicated collision-mitigation mechanisms scale poorly in terms of safety.
The introduction of magnetic repulsion through M1 provided a balanced compromise by reducing collisions while preserving most of the speed advantages of simultaneous ascent, highlighting the effectiveness of directional repulsion for conflict mitigation. This demonstrates that incorporating repulsive control forces is particularly effective in medium-density swarms, where trajectory crossings are more frequent. The M2 method, which adds an intermediate spatial dispersion phase, provided the most favorable balance between speed and safety. While it slightly increased total takeoff time compared to M1, it considerably reduced the number of collisions. The dispersion phase effectively opened maneuvering corridors, reducing the need for aggressive repulsive responses and preventing trajectory conflicts, especially in dense swarms. This confirms the hypothesis that introducing a preliminary separation phase enhances safety without overly compromising speed.
Initial formation also influenced method performance, albeit to a lesser extent. Matrix formations, with their regular spacing, produced slightly fewer collisions for simultaneous strategies without dispersion, whereas random formations introduced variability that occasionally increased collisions for larger swarms. Sequential methods showed only minor differences between formations, as their inherently staggered approach already minimized close encounters. Overall, formation type had a stronger effect on safety than on takeoff time, emphasizing that control strategies are more critical than initial placement when scaling swarm size.
The key trade-off observed in the study is between deployment speed and safety. Sequential takeoff is reliable but slow, while raw Simultaneous takeoff is fast but increasingly unsafe for larger swarms. The addition of magnetic repulsion improves safety while maintaining moderate speed, and the further addition of dispersion produces the safest configuration with only a modest increase in takeoff time. These findings indicate that simultaneous takeoff strategies require additional control mechanisms to remain effective at scale, particularly for dense or randomly initialized swarms.
Overall, these results suggest that for small swarms, method selection may prioritize speed, but for medium to large swarms, simultaneous strategies without dispersion are likely unsafe, and incorporating magnetic repulsion with an intermediate dispersion phase is recommended to achieve both efficiency and safety.
7. Conclusions and Future Work
Achieving an operational procedure for the fast and safe takeoff of a UAV swarm is prone to significant complexities, especially when the target aerial formation is linear, as all UAVs tend to fly along overlapping paths. This substantially increases collision risks or delays the takeoff procedure excessively if more conservative approaches are adopted.
This work represents a step forward toward accelerating the takeoff procedure by introducing novel attraction–repulsion mechanisms that enable a fully distributed solution with low computational complexity. In particular, we propose two new strategies—Simultaneous with Magnetic Repulsion (M1) and Simultaneous with Magnetic Repulsion and Dispersion (M2)—both designed to enhance safety while preserving the speed of simultaneous deployment.
The comparative evaluation of the proposed UAV takeoff methods against the baseline strategies (Sequential, Staggered and Simultaneous) highlights clear trade-offs between deployment speed and safety across different swarm sizes and initial ground formations. As expected, the simultaneous approaches consistently achieve shorter maneuver times than the Sequential method, demonstrating their advantage in rapid deployment. M1 introduces a moderate time penalty due to the repulsion-based conflict-avoidance mechanism, while M2 incurs a slightly larger delay because of its intermediate dispersion phase. However, this additional time reflects the cost of improving safety during the transition to a linear aerial formation.
In terms of safety, M2 shows a pronounced advantage in medium and large swarms, particularly when the initial UAV distribution is random. It significantly reduces the number of unsafe proximity events compared to both the Simultaneous baseline and M1. Sequential deployment also maintains consistently low collision rates and remains robust as swarm size increases, though at the expense of substantially longer operation times. Additionally, M2 reduces the sensitivity of collision risk to the choice of initial formation: whereas random ground arrangements lead to increased conflicts in Simultaneous and M1 for large swarms, M2 maintains more reliable spatial separation throughout the maneuver.
These results highlight a clear operational trade-off: M2 provides a more robust and collision-resilient approach at the expense of slightly increased takeoff time, while Simultaneous methods favor speed but are less safe in dense or randomly arranged swarms. Sequential execution prioritizes safety but is impractical for large swarms due to its high temporal cost. Overall, the results demonstrate that M2 provides a practical and scalable compromise between speed and safety, making it particularly suitable for dense or irregular initial deployments where collision risks are elevated.
Looking forward, several avenues for extending this work are evident. Evaluating M1 and M2 with more complex initial formations, such as circular, star-shaped, columnar, or irregular clusters, will help determine whether the dispersion phase retains its advantage under different spatial constraints. Scaling the experiments to larger swarms, contingent on hardware capabilities and improvements in slot assignment procedures, will provide deeper insights into performance trends and safety dynamics. Introducing realistic communication conditions—including delays, packet loss, and sensing noise—as well as environmental disturbances such as wind, will allow assessment of the robustness of D-FFP in less ideal scenarios. Further investigation into energy-aware metrics, including battery consumption and trajectory efficiency, may also help refine the trade-off between safety and mission duration.
Collectively, these future directions aim to enhance the external validity and robustness of the results while exploring operational criteria essential for real-world UAV swarm deployment. The ultimate goal is to refine the practical application of the proposed methods and ensure reliable, safe, and efficient swarm operations in increasingly complex environments.
Author Contributions
Conceptualization, J.W., E.H.-O. and C.T.C.; methodology, J.W. and C.T.C.; software, E.M.; validation, E.M., J.W. and C.T.C.; formal analysis, J.W., E.H.-O. and C.T.C.; investigation, E.M. and H.G.-A.; resources, E.M. and H.G.-A.; data curation, E.M. and H.G.-A.; writing—original draft preparation, H.G.-A.; writing—review and editing, H.G.-A., E.H.-O. and C.T.C.; visualization, H.G.-A. and C.T.C.; supervision, C.T.C.; project administration, E.H.-O. and C.T.C.; funding acquisition, E.H.-O. and C.T.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially funded by the EU project REMARKABLE (Grant agreement ID: 101086387), under the program HORIZON-MSCA-2021-SE-01-01, and by project CIPROM/2023/29, which is funded by “Direcció General de Ciència i Investigació”, Generalitat Valenciana, Spain.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Bu, Y.; Yan, Y.; Yang, Y. Advancement Challenges in UAV Swarm Formation Control: A Comprehensive Review. Drones 2024, 8, 320. [Google Scholar] [CrossRef]
- Alqudsi, Y.; Makaraci, M. UAV swarms: Research, challenges, and future directions. J. Eng. Appl. Sci. 2025, 72, 12. [Google Scholar] [CrossRef]
- Adam, M.S.; Abdullah, N.F.; Abu-Samah, A.; Amodu, O.A.; Nordin, R. Advanced Path Planning for UAV Swarms in Smart City Disaster Scenarios Using Hybrid Metaheuristic Algorithms. Drones 2025, 9, 64. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.F.A. Increasing Operational Resiliency of UAV Swarms: An Agent-Focused Search and Rescue Framework. Aerosp. Res. Commun. 2024, 1, 12420. [Google Scholar] [CrossRef]
- Heracleous, C.; Kolios, P.; Panayiotou, C. Multi-UAV Wildfire Perimeter Monitoring System. In Proceedings of the IEEE (Preprint/Workshop Version; See Also Zenodo Tech Report), Delft, The Netherlands, 3–6 July 2023. [Google Scholar]
- Caballero, A.; Roman-Escorza, F.J.; Maza, I.; Ollero, A. A Multi-UAV Approach for Fast Inspection of Overhead Power Lines: From Route Planning to Field Operation. J. Intell. Robot. Syst. 2025, 111, 67. [Google Scholar] [CrossRef]
- Sarabia Sauquillo, N.; Gashaw, H.; Wubben, J.; Hernández-Orallo, E.; Calafate, C.T. A Safe In-Flight Reconfiguration Solution for UAV Swarms Based on Attraction/Repulsion Principles. Electronics 2025, 14, 3799. [Google Scholar] [CrossRef]
- Arenillas, J.; Wubben, J.; Hernández-Orallo, E.; Calafate, C.T. D-FFP: A directional force field protocol for the efficient management of aerial conflicts between UAVs. J. Comput. Sci. 2024, 76, 102215. [Google Scholar] [CrossRef]
- Agrawal, A.; Gupta, A.; Bhowmick, J.; Singh, A.; Nallanthighal, R. A Novel Controller of Multi-Agent System Navigation and Obstacle Avoidance. Procedia Comput. Sci. 2020, 171, 1221–1230. [Google Scholar] [CrossRef]
- Fu, X.; Pan, J.; Wang, H.; Gao, X. A formation maintenance and reconstruction method of UAV swarm based on distributed control. Aerosp. Sci. Technol. 2020, 104, 105981. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, P.; Wang, Z.; Rong, D.; Niu, M.; Liu, C. Multi-UAV Obstacle Avoidance and Formation Control in Unknown Environments. Drones 2024, 8, 714. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, G.; Yang, R.; Feng, Z.; He, W. Resilient Formation Reconfiguration for Leader–Follower Multi-UAVs. Appl. Sci. 2023, 13, 7385. [Google Scholar] [CrossRef]
- Zhu, L.; Ma, C.; Li, J.; Lu, Y.; Yang, Q. Connectivity-Maintenance UAV Formation Control in Complex Environment. Drones 2023, 7, 229. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, C.; Wu, H.; Sun, B.; Guo, Y. Obstacle Avoidance-based Control System Design of UAV with Suspended Payload. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6839–6844. [Google Scholar] [CrossRef]
- Raj, A.; Ahuja, K.; Busnel, Y. AI Algorithm for Predicting and Optimizing Trajectory of UAV Swarm. arXiv 2024, arXiv:2405.11722. [Google Scholar] [CrossRef]
- Shi, J.; Zhou, S.; Man, X.; Li, C.; Guo, F. Trajectory planning and tracking for UAVs with deep reinforcement learning and adaptive nonlinear MPC. Expert Syst. Appl. 2026, 303, 130649. [Google Scholar] [CrossRef]
- Madabushi, V.; Kopel, Y.; Polevoy, A.; Moore, J. Dense Fixed-Wing Swarming Using Receding-Horizon NMPC. In Proceedings of the 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 19–23 May 2025; pp. 8656–8662. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, T.; Tan, J.; Zhong, R.; Chen, C. Integrated take-off management and trajectory optimization for merging control in urban air mobility corridors. Transp. Res. Part C Emerg. Technol. 2026, 182, 105370. [Google Scholar] [CrossRef]
- Zheng, X.; Qin, S.; Zhang, Y.; Huo, J. Integrated Two-Stage Optimization of Strategic Unmanned Aerial Vehicle Allocation and Operational Scheduling Under Demand Uncertainty. Appl. Sci. 2025, 15, 11249. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, X. A Novel Collision Avoidance Method for Fixed-wing Unmanned Aerial Vehicles. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 6738–6743. [Google Scholar] [CrossRef]
- Wubben, J.; Calafate, C.T.; Cano, J.C.; Manzoni, P. FFP: A Force Field Protocol for the tactical management of UAV conflicts. Ad Hoc Netw. 2023, 140, 103078. [Google Scholar] [CrossRef]
- GRCDEV. ArduSim. 2025. Available online: https://github.com/GRCDEV/ArduSim/tree/refactor (accessed on 3 December 2025).
- Baldi, S.; Sun, D.; Xia, X.; Zhou, G.; Liu, D. ArduPilot-Based Adaptive Autopilot: Architecture and Software-in-the-Loop Experiments. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4473–4485. [Google Scholar] [CrossRef]
- Astorga, R.V. Simulation of a Quadrotor Unmanned Aerial Vehicle. Master’s Thesis, Universidad Carlos III de Madrid, Madrid, Spain, 2016. [Google Scholar]
- Patelli, A.; Mottola, L. Model-based Real-time Testing of Drone Autopilots. In Proceedings of the DroNet’16, Singapore, 26 June 2016. [Google Scholar]
- Fabra, F.; Calafate, C.T.; Cano, J.C.; Manzoni, P. ArduSim: Accurate and real-time multicopter simulation. Simul. Model. Pract. Theory 2018, 87, 170–190. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license.