Abstract
In this work, a fault detection method and a distributed consensus fault-tolerant control (FTC) scheme are proposed for multiple quadrotor unmanned aerial vehicles (multi-QUAVs) with actuator faults. In order to identify the actuator faults in time, an auxiliary state observer is constructed first. Subsequently, a fault detection scheme based on the observer error is presented, which can improve the early warning ability of the multi-QUAVs. Meanwhile, to handle unknown sudden faults, the Nussbaum function approach is combined with the consensus theory to design a distributed consensus FTC strategy for multi-QUAVs. Compared with the traditional direct fault estimation method using the projection function technique, the proposed Nussbaum-based FTC method can avoid the singularity problem of the controller in a simple way. Moreover, all error signals of the closed-loop system are proved to be uniformly ultimately bounded via Lyapunov stability theory and the consensus control algorithm. Finally, simulation comparison results indicate the early warning capability of the fault detection method and the formation maintenance performance of the developed fault-tolerant controller.
1. Introduction
Nowadays, quadrotor unmanned aerial vehicles (QUAVs) are extensively utilized in many military and civilian fields due to their advantages of simple structure, strong operability and flexible steering [1,2]. Compared with a single QUAV, multiple QUAVs (multi-QUAVs) can cover larger flight areas and perform more complex tasks by mutual collaboration. Hence, the safe formation control of multi-QUAVs has become a prominent research hotspot.
Up to now, significant achievements have been made in the research of UAV formation control [3,4,5,6]. Generally speaking, the formation control methods of multi-UAVs are mainly divided into centralized control and distributed control. The centralized control approach relies on a central controller to schedule and manage the individual UAV. Although its control structure is simple, a single point of failure in the central controller can paralyze the entire system [7,8]. Consequently, the distributed control method, which can enable each UAV to possess the capacity of autonomous decision-making and information interaction, has garnered widespread attention from many researchers [9,10,11,12,13,14,15]. In [11], a virtual target guidance-based distributed model predictive control scheme was proposed for UAV formation to achieve trajectory tracking and obstacle avoidance. In order to reduce the control costs, a periodic event-triggered mechanism was developed for the distributed formation control of leader–follower multi-QUAVs in [12]. In [13], a formation control protocol based on the neighborhood information was presented for multi-QUAVs with a directed topological structure. To ensure flight safety of multi-QUAVs in unknown environments, a distributed cooperative control algorithm with a separation and merger mechanism was proposed in [14]. However, reviewing the aforementioned studies, the issue of actuator faults is not considered, and the fault-tolerant control (FTC) design for multi-UAVs deserves further investigation.
Actuator faults have long been a persistent challenge in multi-UAVs. If an individual actuator fault occurs in a formation of UAVs, the change in its flight state will affect the performance of the entire system [16]. As time goes on, the information of the faulted UAV spreads through the network like a virus. Therefore, many effective fault handling methods have been proposed, such as the unknown input observer [17], neural network technique [18,19], direct adaptive estimation method [20,21] and Nussbaum function approach [22,23,24,25,26]. Among these methods, the Nussbaum function technique has been widely used to address actuator faults due to its simple design process. In [22], a finite-time fractional-order backstepping-based FTC strategy was proposed in conjunction with the Nussbaum function for a fixed-wing UAV system suffering from actuator faults. In [23], an adaptive finite-time attitude tracking controller based on the Nussbaum function was designed for the attitude control subsystem of a QUAV. In order to solve the unknown time-varying parameter problem caused by actuator faults in fixed-wing UAVs, an adaptive FTC strategy was proposed by combining the Nussbaum function with robust adaptive techniques in [24]. In [25], a neural network-based output feedback FTC strategy was developed for unknown nonlinear systems by incorporating the Nussbaum function technique. In [26], a generalized fuzzy adaptive FTC strategy based on the Nussbaum function was proposed to address actuator and sensor faults in multi-input and multi-output systems. However, the application of the Nussbaum function technique in UAV formation control remains underexplored. Meanwhile, most existing studies neglect the integration of fault detection mechanisms.
Effective fault detection enables timely identification of potential system faults and enhances the system’s early warning capability. This capability lays the foundation for subsequent distributed FTC, ensuring rapid system recovery in fault scenarios [27]. In [28], a fault detection and localization method combining the extended state observer and deep forest algorithm was proposed to diagnose unknown actuator faults in QUAVs. In [29], a distributed unknown input observer was designed for a multi-UAVs system, and the actuator faults were detected through adaptive thresholds based on the observer outputs. In [30], a reduced-order extended Kalman filter was adopted to detect the actuator faults in a UAV system, which separated faults from disturbances more accurately. In [31], an active FTC strategy was developed by means of an adaptive neural network structure for fault detection and isolation in a UAV system. In [32], a fault detection filter based on the information of neighboring agents was designed for a nonlinear multi-agent system, and actuator faults were detected by threshold logic. However, the integration of fault detection and distributed FTC in multi-UAVs still remains an open research challenge.
Based on the above analysis, in order to maintain the formation of the multi-QUAV system subjected to actuator faults, a fault detection scheme is presented and a distributed consensus FTC strategy is developed based on the Nussbaum function technique and consensus theory. The main contributions of this work are as follows, and are also shown in Table 1:
- (1)
- Compared with some existing direct FTC methods [24,25], the fault detection scheme is presented in advance to improve the early warning ability of multi-QUAVs.
- (2)
- Compared with the traditional direct fault estimation method using the projection function technique [20,21], the proposed Nussbaum-based FTC method can solve the singularity problem of the controller in a simple way.
- (3)
- Compared with the previous centralized control method [7], the developed distributed consensus FTC strategy can guarantee the autonomy of each QUAV and the boundedness of the error signal of the entire closed-loop system.

Table 1.
Main contributions.
Table 1.
Main contributions.
| Some Existing Methods | Proposed Method | Superiority |
|---|---|---|
| Direct FTC method [24,25] | Fault detection | Improves early warning capability |
| Direct adaptive estimation [20,21] | Nussbaum function | Avoids singularity problem |
| Centralized control [7] | Distributed control | Enhances autonomy of each UAV |
The structure of this paper is organized as follows. Section 2 outlines the research problem. Section 3 provides a detailed description of the proposed fault detection scheme and distributed consensus FTC algorithm. Section 4 presents the simulation results, and Section 5 offers a summary.
Notations: In this paper, and denote the maximum and minimum eigenvalues of a matrix, respectively. represents the Euclidean norm of a matrix. denotes the dimension of a matrix , denotes a positive real number, and represents the unit matrix of .
2. Dynamic Modeling and Problem Description
2.1. Dynamic Modeling
The structural diagram of a QUAV is illustrated in Figure 1, where represents the inertial frame and denotes the body frame. According to the Newton–Euler theorem, the model of the QUAV with actuator faults in multi-QUAVs can be represented as follows [33]:
where , and represent the position vector and velocity vector of the QUAV in the inertial frame, respectively. denotes the rotation matrix from the body frame to the inertial frame of the QUAV. m represents the mass of the QUAV. , and g denotes the gravitational acceleration. and represent the three Euler angles and angular velocity of the QUAV, respectively. denotes the attitude kinematics matrix of the QUAV, and represents the moment of inertia matrix. , and denotes the total thrust of the QUAV. denotes the three-axis torque of the QUAV. , and represents the loss of the effectiveness fault factor of the actuator in the QUAV.
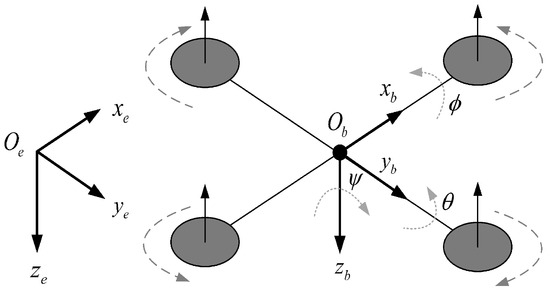
Figure 1.
Structural diagram of the QUAV.
For the convenience of the control design, the model of multi-QUAVs with actuator faults is reformulated as follows:
where , , , , , , , , , , , and represents the nonlinear components of the QUAV.
2.2. Graph Theory
The communication topology among n QUAVs is described by a graph , where denotes the set of nodes, and represents the set of communication edges. The node represents the QUAV, while the edge indicates that the QUAV can acquire information from the QUAV. The set of neighboring nodes of the QUAV is defined as . The adjacency matrix of graph W is represented by , where represents the weight coefficient of edge , and . If , then . Otherwise, . The Laplacian matrix of the graph is defined as , where is the degree matrix with . This paper adopts an undirected graph to represent the communication relationship among n QUAVs, which means the adjacency matrix C is symmetric. Figure 2 illustrates an undirected graph in which all edge weight coefficients are equal to 1.
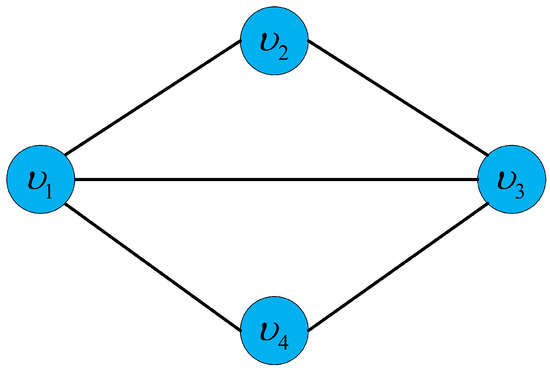
Figure 2.
Undirected graph with all edge weight coefficients equal to 1.
The control objective of this paper is to design a fault detection and distributed consensus FTC algorithm that enables the multi-QUAVs to promptly identify and rectify the actuator faults, while ensuring accurate formation tracking maintenance. To achieve the control objective, the following assumptions, definitions, and lemmas are introduced:
Assumption A1
([34]). In the flight missions of multi-QUAVs, the roll angle and pitch angle of each QUAV are constrained within the range of .
Assumption A2
([28]). The actuator fault factor is any constant within the specified interval .
Assumption A3
([35]). All states of multi-QUAVs (1) are assumed to be measurable, and the desired signals along with their first and second derivatives are bounded.
Assumption A4
([20]). In the event of an actuator fault, there exists a feasible controller that allows the multi-QUAVs to successfully complete the tracking task.
Definition 1
([22]). A smooth function is called a Nussbaum function if it satisfies the following relationship:
At present, commonly used Nussbaum functions include , and . The Nussbaum function utilized in this paper is .
Lemma 1
([25]). Consider a smooth function and a Nussbaum function defined on . If there exists a function and constant , , such that the following inequality holds,
then , and are bounded on .
Lemma 2
([32]). If A is a symmetric matrix and x is a column vector, then the following inequality holds:
Lemma 3
([36]). If the communication topology graph W is an undirected connectivity graph, the matrices L and are symmetric positive definite matrices, where Λ is a non-negative vector.
Lemma 4
([37]). For bounded initial conditions, if there exists a continuous positive definite function satisfying and , where are K class functions, and , then the solution is uniformly ultimately bounded.
3. Fault Detection and Distributed Consensus Fault-Tolerant Control Design
In this section, a fault detection scheme and a distributed consensus FTC algorithm are proposed, which enable the multi-QUAVs to quickly identify and rectify actuator faults. Figure 3 illustrates the block diagram of the fault detection and distributed consensus FTC algorithm.
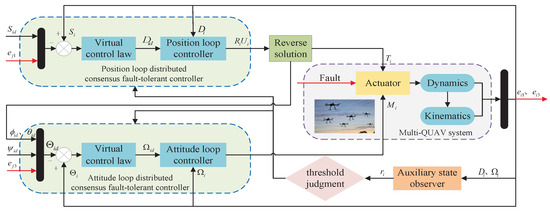
Figure 3.
The flow block diagram of the proposed method.
3.1. Fault Detection Scheme Design
In this subsection, an auxiliary state observer is designed for each QUAV, and the actuator faults in the system are identified based on the observer residuals and the set thresholds. The proposed fault detection algorithm can effectively improve the early warning capability of the system.
The auxiliary state observer of the QUAV is designed as follows:
where and represent the estimated value of and , respectively. and are the positive definite diagonal matrices to be designed.
The residuals of the auxiliary state observer are expressed as follows:
Differentiating the residuals and , we obtain
To simplify subsequent derivations, the dynamics of the residual are represented as follows:
where , denotes the residual of the system, represents the controller designed later, and its boundedness will be proved in the subsequent sections. denotes the actuator faults factor matrix. denotes the positive definite matrix to be designed.
The following theorem is introduced to clarify the fault detection method discussed in this section:
Theorem 1.
The detection threshold for determining whether actuator faults occur in multi-QUAVs is designed as
where , , with P being a positive definite matrix. If the norm of the residual output by the QUAV exceeds the fault detection threshold function , it is determined that the QUAV in the system has experienced an actuator fault.
Proof.
Let the Lyapunov function be defined as
Then, we have
According to Lemma 2, it outputs
Thus, it gives
Solving the differential inequality from Equation (15) yields the following form:
Ultimately, it is obtained that
where . □
It is clearly observed that when an actuator fault occurs in the QUAV of the formation, it leads to . Therefore, a fault detection algorithm is proposed to identify actuator faults in multi-QUAVs by setting a threshold, and its expression is as follows:
where represents the predefined threshold function, and represents the residual evaluation function. From the fault detection algorithm, it can be seen that an actuator fault occurs in the QUAV in multi-QUAVs when .
3.2. Distributed Consensus Fault-Tolerant Control Design
After completing the fault detection design for multi-QUAVs, this section presents a layered distributed consensus FTC strategy. By utilizing the backstepping method and Nussbaum function, the proposed strategy aims to ensure system stability under actuator faults.
First, consider the position loop equation in Equation (2):
Define the position loop errors for the QUAV as
where and denote the tracking errors of the position and velocity of the QUAV with respect to the desired signals and , respectively.
To achieve distributed consensus FTC in multi-QUAVs, each QUAV needs to not only track its own desired trajectory but also consider the relative errors with other QUAVs. Therefore, the synchronized formation tracking error of position loop is defined as follows:
where and are weighting coefficients.
By transforming Equation (21), we obtain
where , and represents the elements of the Laplacian matrix L.
Taking the derivative of yields
The virtual control law for the position loop is designed as follows:
where is a positive definite symmetric matrix to be designed.
Substituting into Equation (23) yields
Subsequently, differentiating the error variable yields
Based on the Nussbaum function , the position loop distributed consensus fault-tolerant controller is designed as follows:
where is a positive definite symmetric matrix to be designed, and , .
By substituting the position loop distributed fault-tolerant controller into Equation (26), the following result is obtained:
The Lyapunov function is defined as
Differentiating Equation (29) yields
where .
To determine the total thrust for each QUAV, we let . Then, the desired attitude angles , , and total thrust for the QUAV can be computed using the following equations [21]:
Consider the attitude loop equation in Equation (2):
Similarly to the design steps of the position loop controller, define the attitude loop errors for the QUAV as
where and represent the tracking errors of the attitude angle and angular velocity of the QUAV with respect to the desired signals and , respectively.
Similarly, define the attitude-synchronized formation tracking error as follows:
where and are weighting coefficients.
By transforming Equation (34), the following is obtained:
where , and represents the elements of the Laplacian matrix L.
Differentiating Equation (35) yields
The virtual control law of attitude loop is formulated as
where represents the positive definite symmetric matrix that needs to be designed.
By substituting into , the following is obtained:
Next, differentiating the error variable yields
The attitude loop distributed consensus fault-tolerant controller signal, based on the Nussbaum function , is designed as follows:
where is the positive definite symmetric matrix that needs to be designed, and , .
Substituting the attitude loop distributed fault-tolerant controller into Equation (39) yields
The Lyapunov function is selected as
Differentiating Equation (42) and substituting Equations (38) and (41) yield
where , .
3.3. Stability Analysis
First, the synchronized formation tracking errors of position and attitude are as follows:
Then the synchronized formation tracking errors of n QUAVs can be expressed as
where , , . ⊗ denotes the Kronecker product of the matrix.
From Lemma 3, one can obtain
where denotes the matrix minimum singular value. From Equation (46), it can be seen that if the synchronized formation tracking error converges to a small interval containing 0, the synchronization tracking control objective can be achieved, and each QUAV can track its own desired signals.
In summary, the following theorem can be derived:
Theorem 2.
For the nonlinear model (2) of multi-QUAVs with actuator faults, the designed distributed consensus fault-tolerant controllers (27) and (40) can ensure the global stability of the closed-loop system, with tracking errors converging asymptotically.
The Lyapunov function is selected as
By referencing Equations (30) and (43), and differentiating Equation (47), we obtain
where , , , , .
From Lemma 1, it is known that , , and are bounded over the interval . Next, by integrating Equation (48), we obtain
According to Equation (49) and Lemma 4, as time progresses, gradually converges, indicating that all error signals in the closed-loop system are ultimately uniformly bounded. This concludes the proof.
4. Simulation Results
To validate the effectiveness of the fault detection and distributed consensus FTC algorithms proposed in this paper, simulations are conducted on a flight formation consisting of four QUAVs. The communication relationships of the formation of QUAVs are shown in Figure 4.
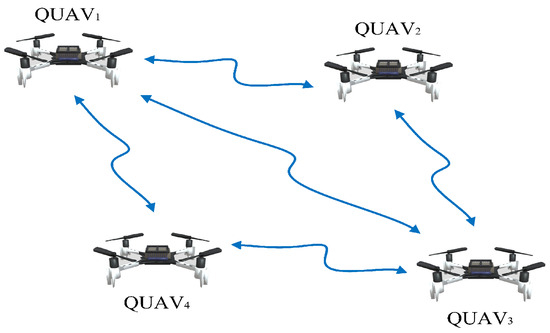
Figure 4.
QUAV formation.
The expected signals and initial states for each QUAV are summarized in Table 2 and Table 3, respectively.
Table 2.
Expected signals for QUAVs.
Table 3.
Initial states of QUAVs.
The mass of the QUAV is kg, g = 9.8 m2/s, and the moment of inertia matrix is . The gain matrices in the auxiliary state observer are selected as and . The weight coefficients in the synchronized formation tracking errors are designed as and . The designed controller parameters are , , , .
In the simulation, the QUAV4 is assumed to be healthy. The actuator faults factors of other QUAVs are set as
QUAV1 fault:
QUAV2 fault:
QUAV3 fault:
The simulation results are shown in Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10 and Figure 11. Figure 5 illustrates the fault detection results for the four QUAVs. At simulation times of 10 s, 30 s, and 40 s, the observer output residuals for QUAV1, QUAV2, and QUAV3 exceed the designated threshold, while the observer output residual for QUAV4 remains below the threshold. This confirms that the designed fault detection algorithm effectively and promptly identifies actuator fault. In other words, the early fault warning ability can be enhanced, which is beneficial to system safety.
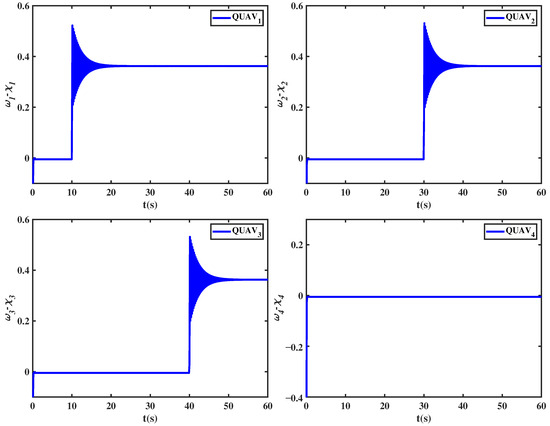
Figure 5.
Fault detection results.
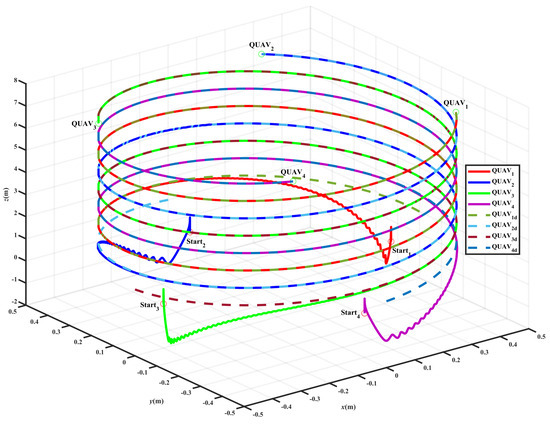
Figure 6.
Three-dimensional trajectory tracking results.
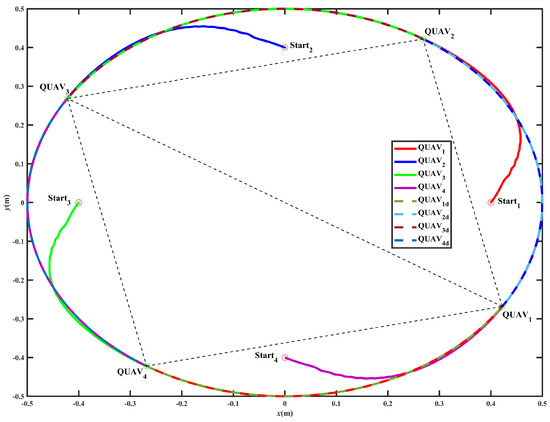
Figure 7.
Top view of trajectory tracking results.
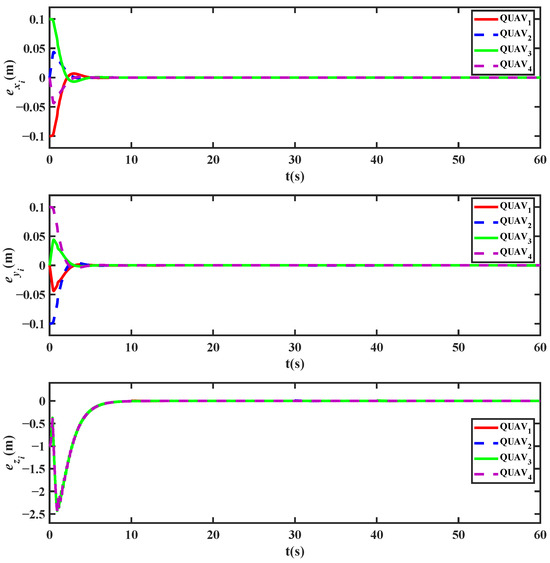
Figure 8.
Position tracking errors.
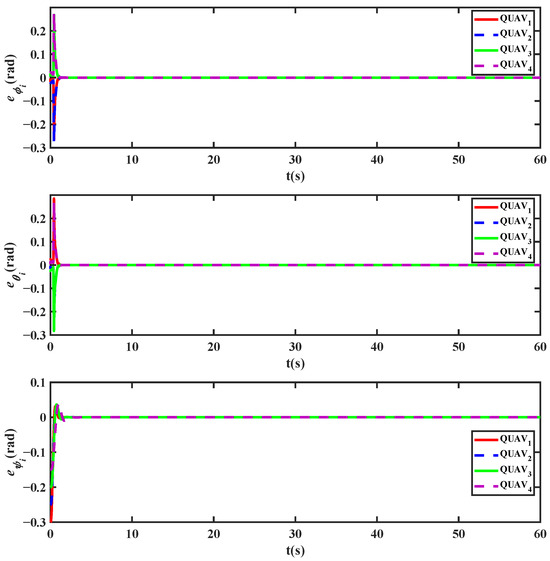
Figure 9.
Attitude angle tracking errors.
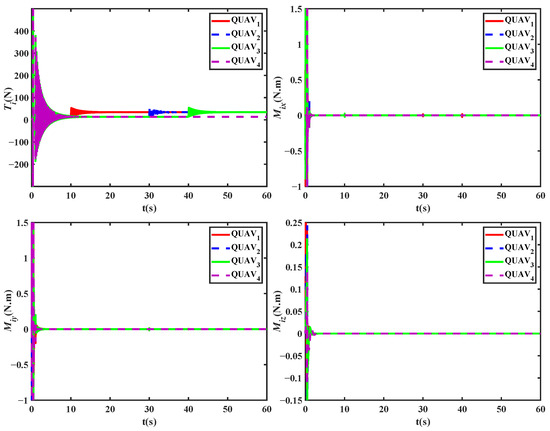
Figure 10.
Control input curves.
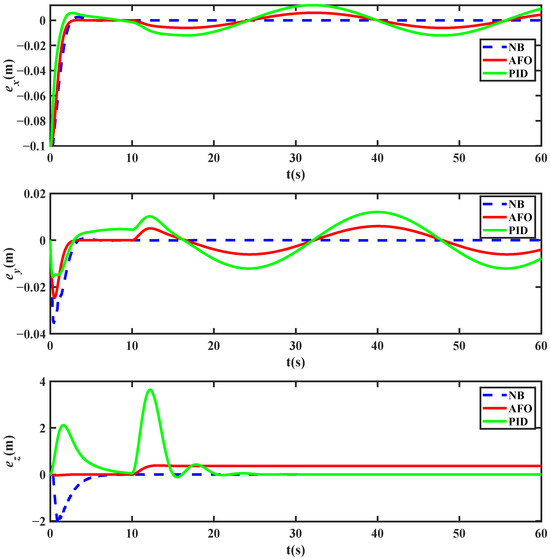
Figure 11.
Comparison results of different FTC methods.
Figure 6 shows the trajectory tracking results of the four QUAVs in a three-dimensional environment. From Figure 6, it can be seen that with the designed distributed consensus FTC algorithm, the four QUAVs are still able to accurately track the desired trajectories even if actuator faults occur. Figure 7 shows the top view of the trajectory tracking of the four QUAVs, where the formation maintains a rectangular shape during flight. Figure 6 and Figure 7 indicate that the multi-QUAV system has better fault-tolerant capability.
Figure 8 and Figure 9 show the position and attitude angle tracking errors of the four QUAVs during flight. From Figure 8 and Figure 9, it can be observed that the position tracking and attitude tracking errors of the four QUAVs eventually converge to zero asymptotically. This indicates that under the designed distributed consensus FTC algorithm, the four QUAVs can maintain stable attitude angles while ensuring safe flight. Figure 10 illustrates the control input curves of the four QUAVs, which are able to make timely adjustments when actuator faults occur.
In order to exhibit the superiority of the developed FTC strategy, the contrastive results of tracking errors under different FTC methods are provided in Figure 11. Taking the position loop of QUAV1 as an example, the blue lines in Figure 11 represent the tracking error results under the proposed Nussbaum function-based FTC scheme (NB), the green lines denote those under the PID controller [21], and the red lines refer to those under the adaptive fault observer (AFO) [20]. From Figure 11, it can be seen that when there is no fault for 10 s, all three control methods can stabilize the tracking errors. After 10 s, a sudden actuator fault occurs in QUAV1. The presented FTC method can still ensure the convergence of the tracking errors of the system, while the tracking errors obtained by the other two methods have different degrees of deviation. The comparison results clearly demonstrate the superiority of the proposed method.
The above simulation results provide a comprehensive analysis of the fault detection and distributed consensus FTC algorithm for a formation of four QUAVs. The results show that when actuator faults occur, the fault detection algorithm accurately identifies these faults, and the designed distributed consensus FTC algorithm effectively maintains tracking of the desired trajectory while stabilizing the attitude angles. Furthermore, the comparisons between the PID approach and the AFO method further demonstrate the superior performance of the proposed Nussbaum function-based FTC method in ensuring the stable flight of multi-QUAVs.
5. Conclusions
This paper addresses the issue of actuator faults in multi-QUAVs by proposing a fault detection and distributed consensus FTC algorithm. Auxiliary state observers have been designed for each QUAV to identify faults based on predefined thresholds. A layered distributed consensus FTC strategy has been developed using the Nussbaum function and backstepping methods to effectively manage actuator faults and formation maintenance. Simulation results demonstrate that the proposed method can detect actuator faults in real time and provide robust fault tolerance, ensuring formation flight and efficient task execution for multi-QUAVs. In the future, the handling of communication delays and the effectiveness validation of control algorithms on the physical platform will be the focus of our research.
Author Contributions
Conceptualization, K.Y.; methodology, K.Y. and J.F.; investigation, K.Y. and J.F.; writing—original draft preparation, K.Y., J.F. and J.T.; writing—review and editing, J.T. and C.H.; supervision, K.Y.; project administration, K.Y. and J.T.; funding acquisition, J.T. and C.H. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grants 62303367 and 52402453, the Foundation of Yunnan Key Laboratory of Unmanned Autonomous Systems under Grant 202408YB04, the Shaanxi Provincial Education Department Service Local Special Plan Project under Grant 24JC038, the Science and Technology Plan Project of Beilin District under Grant GX2413, the Science and Technology Plan Project of Weiyang District under Grant 202426, and the 2023 Youth Innovation Team of Shaanxi Universities.
Data Availability Statement
All data generated or analyzed are included in this study.
Acknowledgments
The authors thank the colleagues for their constructive suggestions and research assistance throughout this study.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Han, Y.; Liu, H.; Wang, Y.; Liu, C. A comprehensive review for typical applications based upon unmanned aerial vehicle platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9654–9666. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, X.; Yan, Y. UAV formation trajectory planning algorithms: A review. Drones 2023, 7, 62. [Google Scholar] [CrossRef]
- Li, J.; Liu, J.; Huangfu, S.; Yu, D. Leader-follower formation of light-weight UAVs with novel active disturbance rejection control. Appl. Math. Model. 2023, 117, 577–591. [Google Scholar] [CrossRef]
- Zhen, Q.; Wan, L.; Li, Y.; Jiang, D. Formation control of a multi-AUVs system based on virtual structure and artificial potential field on SE (3). Ocean Eng. 2022, 253, 111148. [Google Scholar] [CrossRef]
- Pan, Z.; Zhang, C.; Xia, Y.; Xiong, H. An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1129–1133. [Google Scholar] [CrossRef]
- Suo, W.; Wang, M.; Zhang, D.; Qu, Z. Formation control technology of fixed-wing UAV swarm based on distributed ad hoc network. Appl. Sci. 2022, 12, 535. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Fu, J. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar] [CrossRef]
- Ouyang, Q.; Wu, Z.; Cong, Y.; Wang, Z. Formation control of unmanned aerial vehicle swarms: A comprehensive review. Asian J. Control 2023, 25, 570–593. [Google Scholar] [CrossRef]
- Cai, Z.; Zhou, H.; Zhao, J.; Wu, K. Formation control of multiple unmanned aerial vehicles by event-triggered distributed model predictive control. IEEE Access 2018, 6, 55614–55627. [Google Scholar] [CrossRef]
- Liu, Y.; Montenbruck, J.; Zelazo, D.; Odelga, M. A distributed control approach to formation balancing and maneuvering of multiple multirotor UAVs. IEEE Trans. Robot. 2018, 34, 870–882. [Google Scholar] [CrossRef]
- Cai, Z.; Wang, L.; Zhao, J.; Wu, K. Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chin. J. Aeronaut. 2020, 33, 1037–1056. [Google Scholar] [CrossRef]
- Tong, W.; Jie, W.; Bailing, T. Periodic event-triggered formation control for multi-UAV systems with collision avoidance. Chin. J. Aeronaut. 2022, 35, 193–203. [Google Scholar]
- Dong, X.; Hua, Y.; Zhou, Y.; Ren, Z. Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems. IEEE Trans. Autom. Sci. Eng. 2018, 16, 229–240. [Google Scholar] [CrossRef]
- Guo, J.; Qi, J.; Wang, M.; Wu, C. Collision-free distributed control for multiple quadrotors in cluttered environments with static and dynamic obstacles. IEEE Robot. Autom. Lett. 2023, 8, 1501–1508. [Google Scholar] [CrossRef]
- Ouyang, Y.; Xue, L.; Dong, L.; Sun, C. Neural network-based finite-time distributed formation-containment control of two-layer quadrotor UAVs. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 4836–4848. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C. Refined fractional-order fault-tolerant coordinated tracking control of networked fixed-wing UAVs against faults and communication delays via double recurrent perturbation FNNs. IEEE Trans. Cybern. 2022, 54, 1189–1201. [Google Scholar] [CrossRef]
- Zhang, H.; Mu, Y.; Gao, Z.; Wang, W. Observer-based fault reconstruction and fault-tolerant control for nonlinear systems subject to simultaneous actuator and sensor faults. IEEE Trans. Fuzzy Syst. 2021, 30, 2971–2980. [Google Scholar] [CrossRef]
- Jin, X.; Zhao, X.; Yu, J.; Wu, X. Adaptive fault-tolerant consensus for a class of leader-following systems using neural network learning strategy. Neural Netw. 2020, 121, 474–483. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, H.; Park, J.; He, P. Event-triggered impulsive fault-tolerant control for memristor-based RDNNs with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 2993–3004. [Google Scholar] [CrossRef]
- Yan, K.; Ren, H. Fault identification and fault-tolerant control for unmanned autonomous helicopter with global neural finite-time convergence. Neurocomputing 2021, 459, 165–175. [Google Scholar] [CrossRef]
- Shen, H.; Du, J.; Yan, K.; Liu, Y. VGESO-based finite-time fault-tolerant tracking control for quadrotor unmanned aerial vehicle. Int. J. Aerosp. Eng. 2024, 2024, 2541698. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C. Nussbaum-based finite-time fractional-order backstepping fault-tolerant flight control of fixed-wing UAV against input saturation with hardware-in-the-loop validation. Mech. Syst. Signal Process. 2021, 153, 107406. [Google Scholar] [CrossRef]
- Xu, G.; Xia, Y.; Zhai, D.; Lyu, W. Adaptive finite-time attitude tracking control of quadrotor under actuator faults and external disturbances with guaranteed performance. Int. J. Adapt. Control Signal Process. 2022, 36, 2662–2676. [Google Scholar] [CrossRef]
- Tan, J.; Dong, Y.; Shao, P.; Qu, G. Anti-saturation adaptive fault-tolerant control with fixed-time prescribed performance for UAV under AOA asymmetric constraint. Aerosp. Sci. Technol. 2022, 120, 107264. [Google Scholar] [CrossRef]
- Yan, K.; Chen, C.; Xu, X.; Wu, Q. Neural network-based output feedback fault tolerant tracking control for nonlinear systems with unknown control directions. Complexity 2022, 2022, 4770439. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M. General fuzzy adaptive fault-tolerant control based on Nussbaum-type function with additive and multiplicative sensor and state-dependent actuator faults. Fuzzy Sets Syst. 2023, 468, 108616. [Google Scholar] [CrossRef]
- Puchalski, R.; Giernacki, W. UAV fault detection methods, state-of-the-art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- Song, J.; Shang, W.; Ai, S.; Zhao, K. Model and data-driven combination: A fault diagnosis and localization method for unknown fault size of quadrotor UAV actuator based on extended state observer and deep forest. Sensors 2022, 22, 7355. [Google Scholar] [CrossRef]
- Yang, Z.; Li, M.; Yu, Z.; Cheng, Y. Fault detection and fault-tolerant cooperative control of multi-UAVs under actuator faults sensor faults, and wind disturbances. Drones 2023, 7, 503. [Google Scholar] [CrossRef]
- Madruga, S.; Nascimento, T.; Holzapfel, F.; Lima, A. Estimating the loss of effectiveness of UAV actuators in the presence of aerodynamic effects. IEEE Robot. Autom. Lett. 2023, 8, 1335–1342. [Google Scholar] [CrossRef]
- Abbaspour, A.; Yen, K.; Forouzannezhad, P.; Sargolzaei, A. A neural adaptive approach for active fault-tolerant control design in UAV. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 3401–3411. [Google Scholar] [CrossRef]
- Li, X.; Wang, J. Active fault-tolerant consensus control of Lipschitz nonlinear multiagent systems. Int. J. Robust Nonlinear Control 2020, 30, 5233–5252. [Google Scholar] [CrossRef]
- Yan, K.; Wu, Q. Adaptive tracking flight control for unmanned autonomous helicopter with full state constraints and actuator faults. ISA Trans. 2022, 128, 32–46. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Ma, H.; Gu, D.; Xie, A. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Yan, K.; Chen, M.; Wu, Q.; Zhu, R. Robust adaptive compensation control for unmanned autonomous helicopter with input saturation and actuator faults. Chin. J. Aeronaut. 2019, 32, 2299–2310. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C.; Su, H.; Zhang, Q. On decentralized adaptive full-order sliding mode control of multiple UAVs. ISA Trans. 2017, 71, 196–205. [Google Scholar] [CrossRef]
- Chen, M.; Shi, P.; Lim, C. Adaptive neural fault-tolerant control of a 3-DOF model helicopter system. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 260–270. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).