
Engineering-Oriented Layout Optimization and Trade-Off Design of a 12U CubeSat with In-Orbit Validation


Abstract
1. Introduction
2. Mathematical Model for SLOD of Cubesats
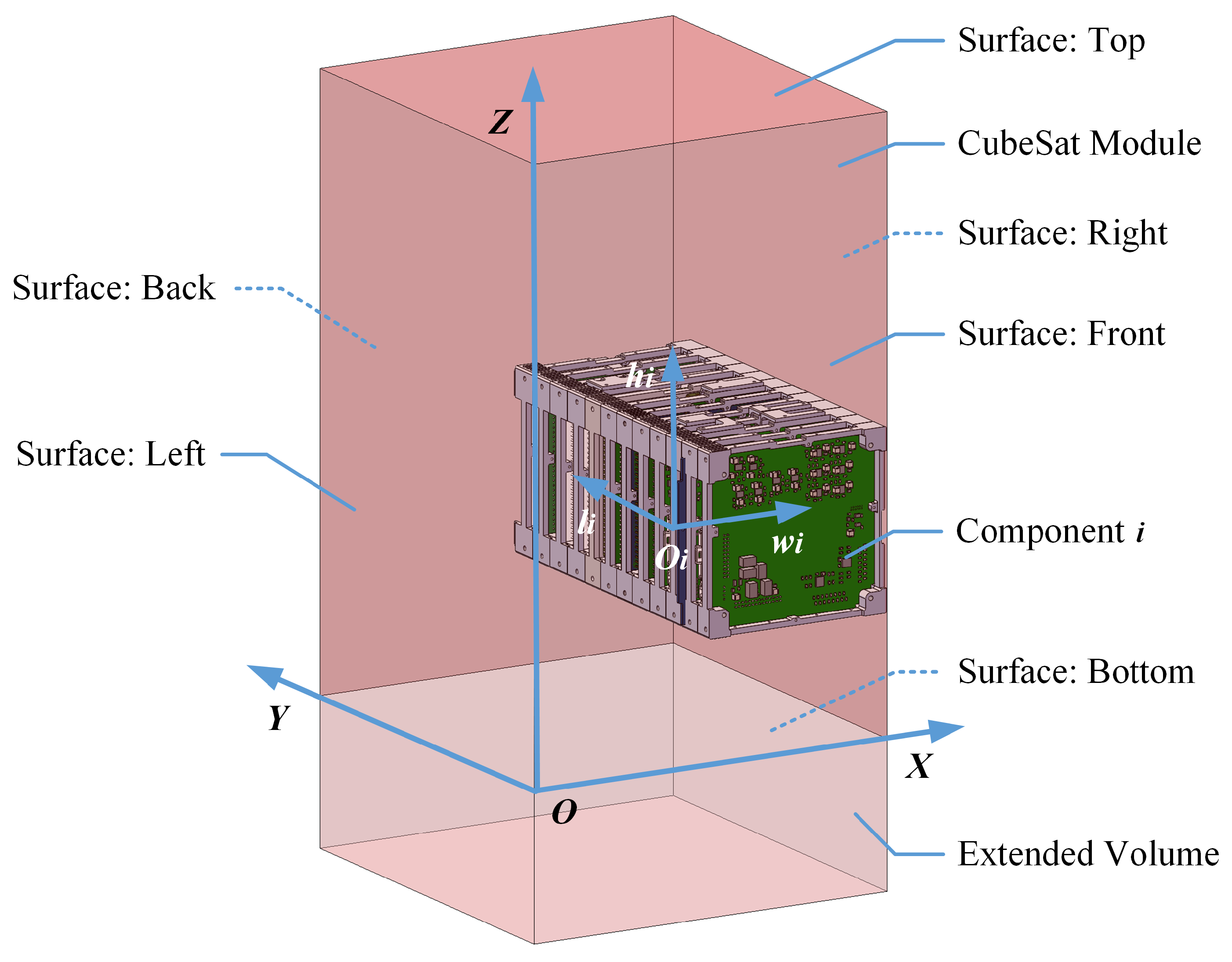
2.1. Key Features of CubeSats
2.2. Assumption and Objectives
2.3. Mathematical Model
3. Hybrid Algorithm for CubeSat Layout Optimization and Trade-Off Design
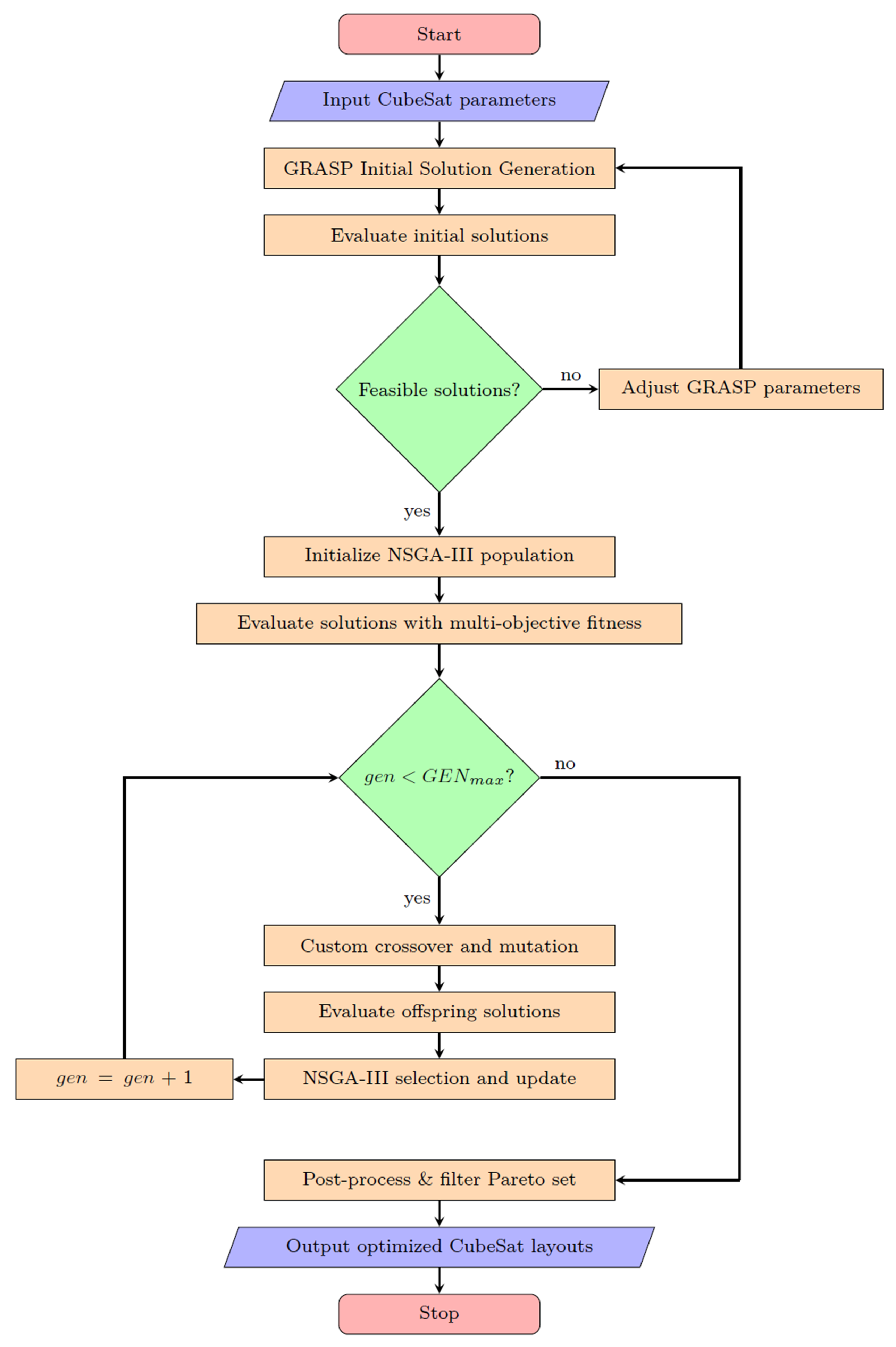
3.1. Optimization Strategy
3.2. Workflow and Implementation
4. Engineering Case Study
4.1. Initial Feasibility Analysis
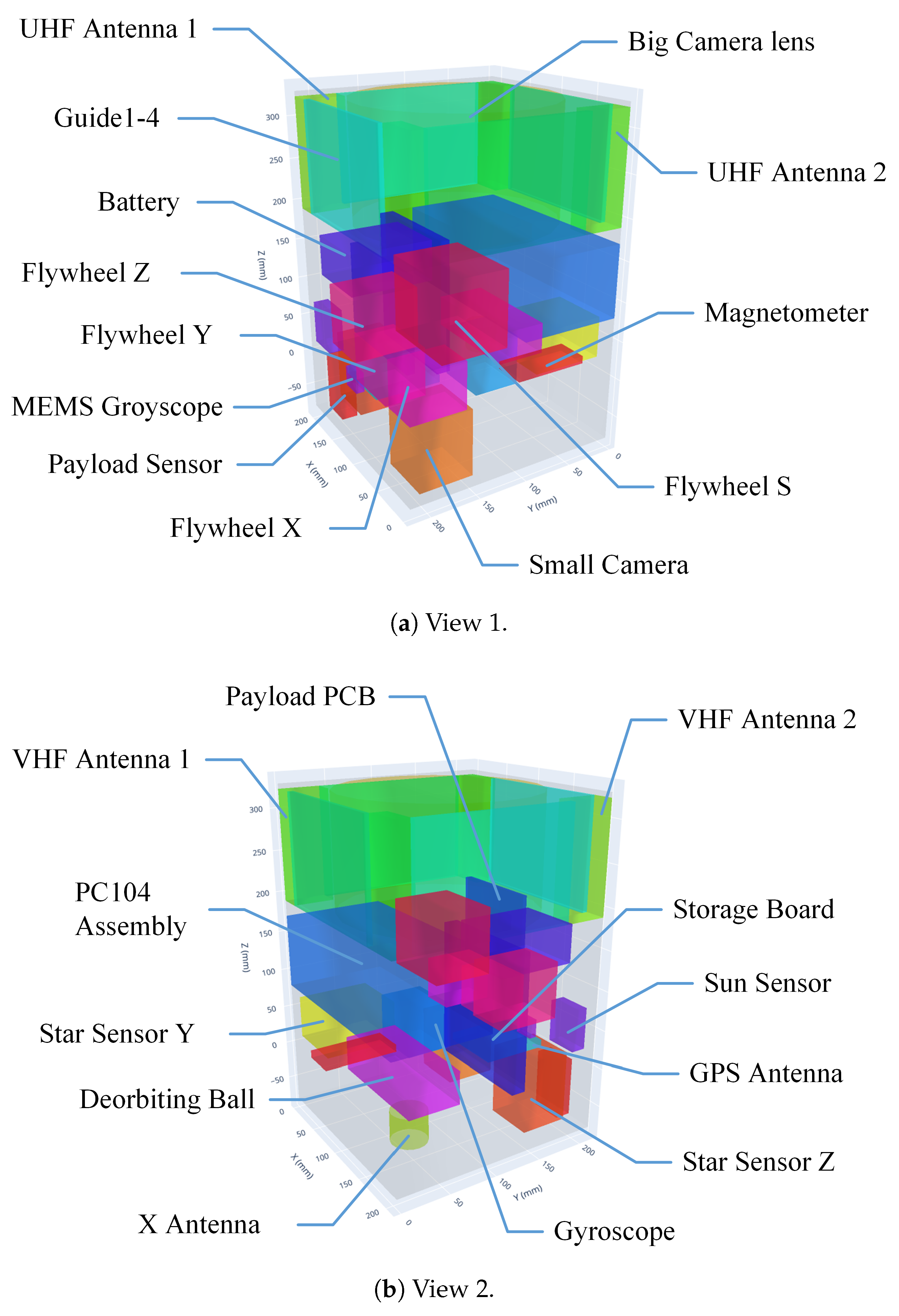
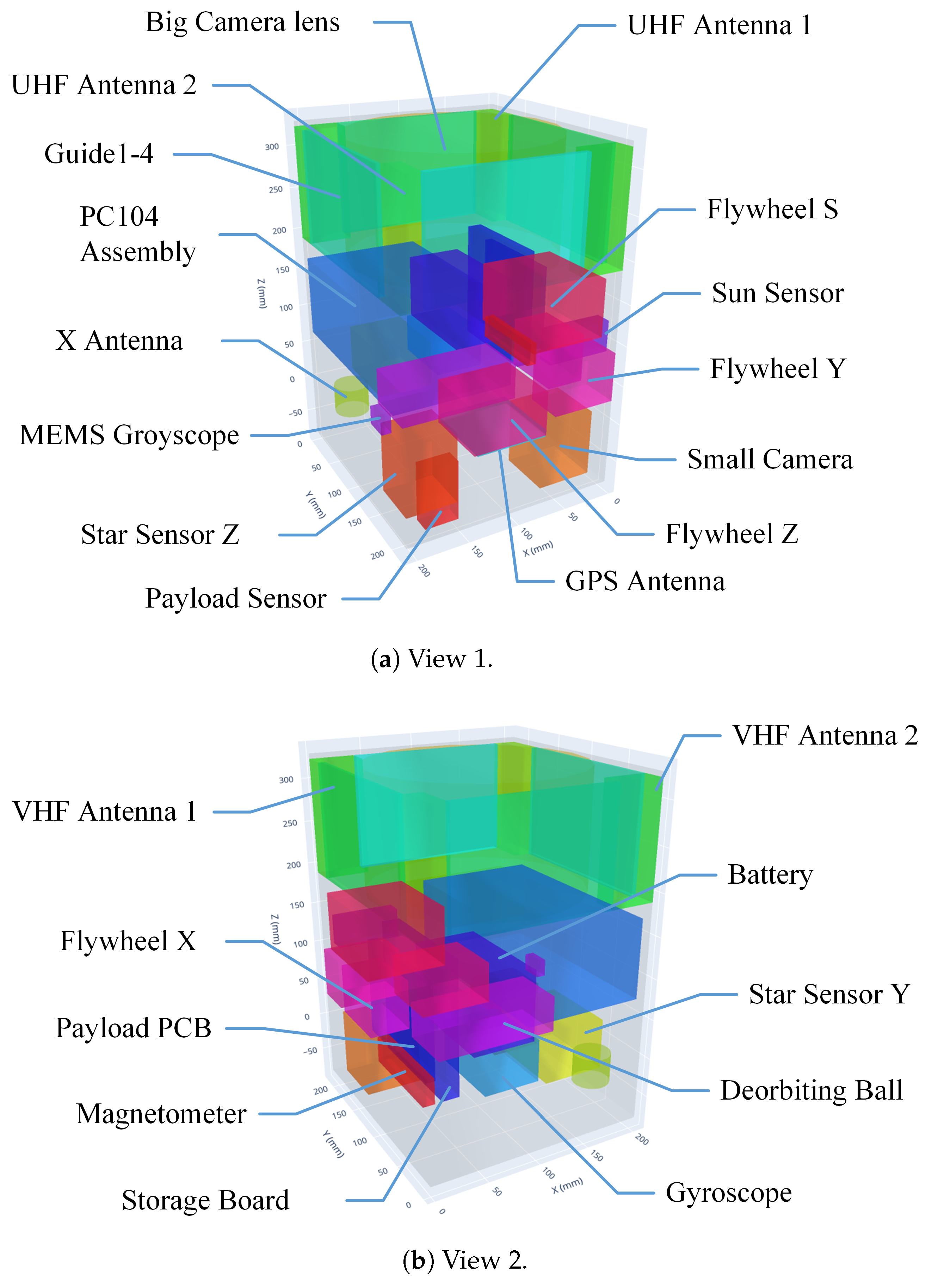
4.2. Detailed Design Optimization
4.3. Final-Stage Adjustment and Trade-Off
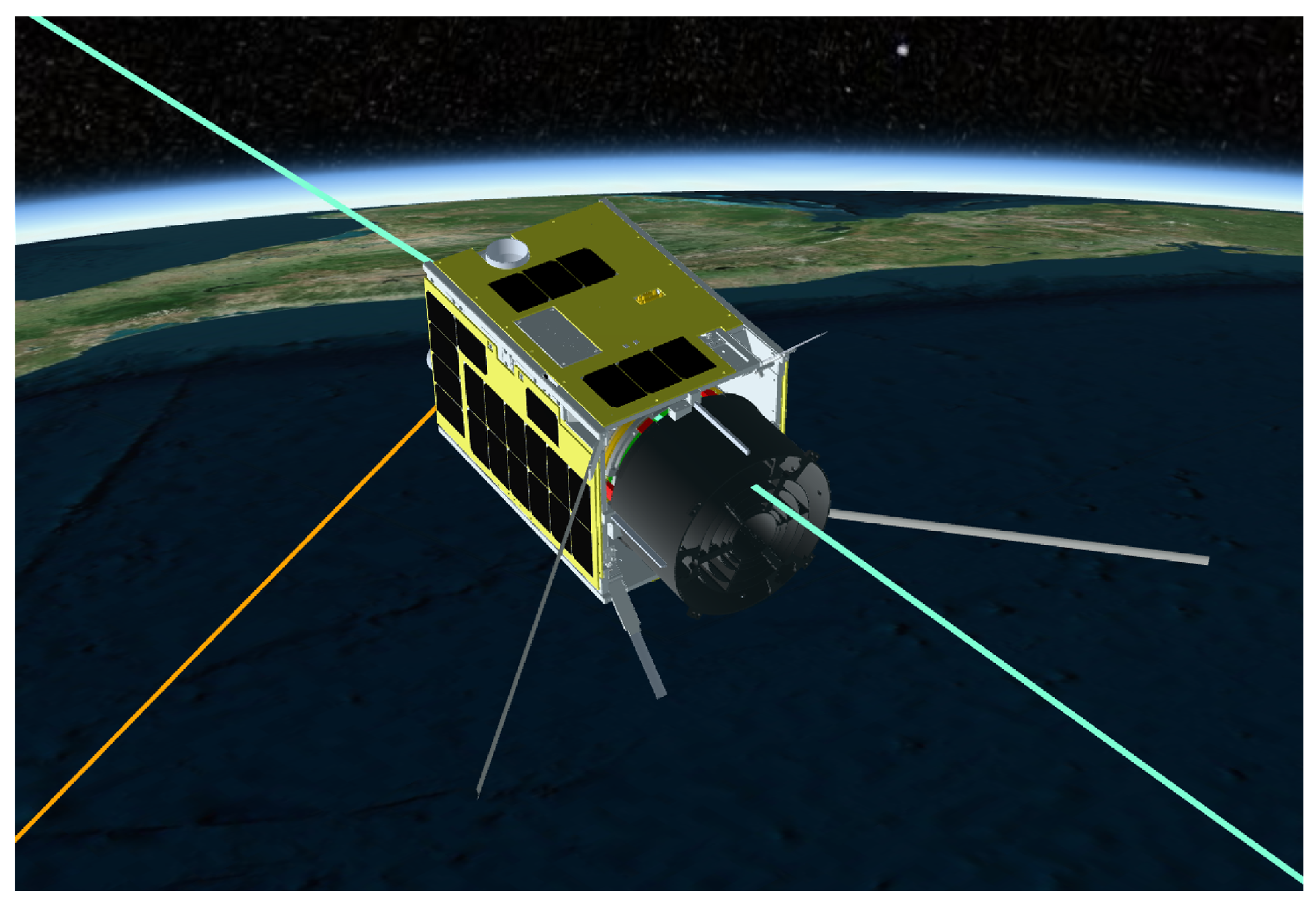
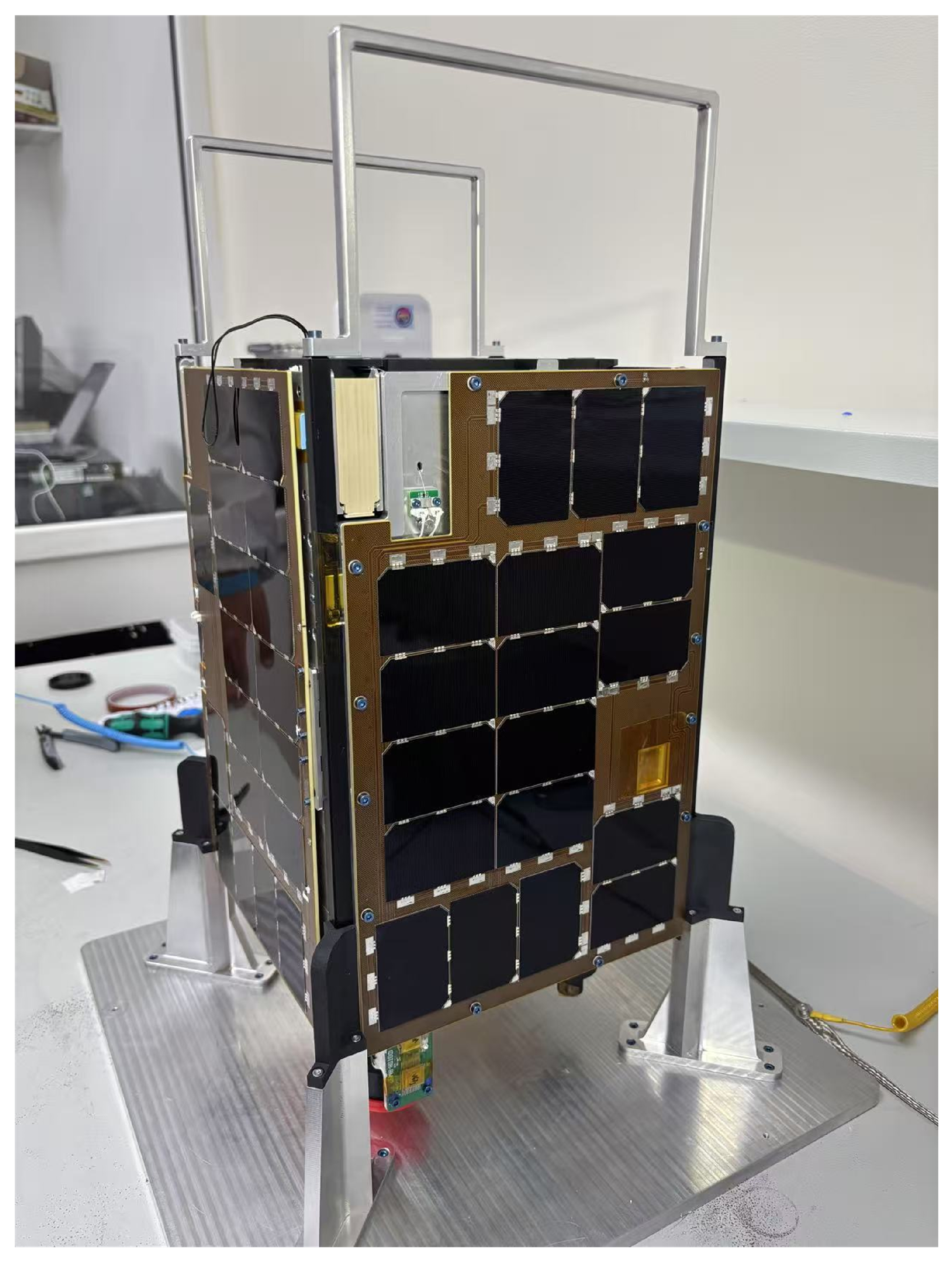
4.4. Ground Validation and In-Orbit Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Sensitivity Study of the Baseline-Bias Coefficient α

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | ||||||
|---|---|---|---|---|---|---|
| 2 | −1.0164 | 0.554 | 2.4186 | 3.562 | −3049.77 | 0.243 |
| 1 | −1.0176 | 0.665 | 2.4266 | 3.562 | −3024.64 | 0.361 |
| 4 | −1.0110 | 0.696 | 2.4208 | 3.724 | −3083.50 | 0.388 |
| 3 | −1.0125 | 1.010 | 2.4388 | 3.724 | −3086.16 | 0.953 |
| ID | ||||||
|---|---|---|---|---|---|---|
| 1 | −1.0176 | 0.530 | 2.4175 | 3.562 | −3049.77 | 0.236 |
| 2 | −1.0164 | 0.697 | 2.4283 | 3.724 | −3096.45 | 0.390 |
| 4 | −1.0368 | 0.701 | 2.4206 | 3.562 | −3083.50 | 0.414 |
| 3 | −1.0122 | 0.846 | 2.4298 | 3.562 | −3091.27 | 0.663 |
| ID | ||||||
|---|---|---|---|---|---|---|
| 1 | −1.0176 | 0.527 | 2.4173 | 4.766 | −3083.58 | 0.049 |
| 2 | −1.0162 | 0.678 | 2.4276 | 3.724 | −3057.55 | 0.359 |
| 4 | −1.0122 | 0.706 | 2.4206 | 3.562 | −3083.50 | 0.422 |
| 3 | −1.0137 | 0.797 | 2.4289 | 3.562 | −3091.27 | 0.575 |
| 5 | −1.0101 | 0.988 | 2.4391 | 3.724 | −3091.43 | 0.913 |
| ID | |||||||
|---|---|---|---|---|---|---|---|
| 0.1 | 2 | −1.0164 | 0.554 | 2.4186 | 3.562 | −3049.77 | 0.243 |
| 1 | 1 | −1.0176 | 0.530 | 2.4175 | 3.562 | −3049.77 | 0.236 |
| 2 | 1 | −1.0176 | 0.527 | 2.4173 | 4.766 | −3083.58 | 0.049 |
References
- Heidt, H.; Puig-Suari, J.; Moore, A.; Nakasuka, S.; Twiggs, R. CubeSat: A new generation of picosatellite for education and industry low-cost space experimentation. In Proceedings of the the 14th Annual/USU Conference on Small Satellites, Logan, UT, USA, 21–24 August 2000. [Google Scholar]
- Chin, A.; Coelho, R.; Nugent, R.; Munakata, R.; Puig-Suari, J. CubeSat: The pico-satellite standard for research and education. In Proceedings of the AIAA SPACE 2008 Conference & Exposition, San Diego, CA, USA, 9–11 September 2008. [Google Scholar]
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Macario-Rojas, A.; Smith, K. Spiral coning manoeuvre for in-orbit low thrust characterisation in CubeSats. Aerosp. Sci. Technol. 2017, 71, 337–346. [Google Scholar] [CrossRef]
- Imken, T.; Castillo-Rogez, J.; He, Y.; Baker, J.; Marinan, A. CubeSat flight system development for enabling deep space science. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–14. [Google Scholar]
- Gardner, T.; Cheetham, B.; Forsman, A.; Meek, C.; Kayser, E.; Parker, J.; Thompson, M.; Latchu, T.; Rogers, R.; Bryant, B.; et al. Capstone: A Cubesat Pathfinder for the Lunar Gateway Ecosystem; Utah State University: Logan, UT, USA, 2021. [Google Scholar]
- Schoolcraft, J.; Klesh, A.; Werne, T. MarCO: Interplanetary mission development on a CubeSat scale. In Space Operations: Contributions from the Global Community; Springer: Cham, Switzerland, 2017; pp. 221–231. [Google Scholar]
- Peral, E.; Tanelli, S.; Statham, S.; Joshi, S.; Imken, T.; Price, D.; Sauder, J.; Chahat, N.; Williams, A. RainCube: The first ever radar measurements from a CubeSat in space. J. Appl. Remote Sens. 2019, 13, 032504. [Google Scholar] [CrossRef]
- Huggins, G.M.; Talaksi, A.; Andrews, D.; Lightsey, E.G.; Cavender, D.; McQueen, D.; Williams, H.; Diaz, C.; Baker, J.; Kowalkowski, M. Development of a CubeSat-scale green monopropellant propulsion system for NASA’s lunar flashlight mission. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 & 19–21 January 2021; p. 1976. [Google Scholar]
- Nason, I.; Puig-Suari, J.; Twiggs, R. Development of a family of picosatellite deployers based on the CubeSat standard. In Proceedings of the Proceedings, IEEE Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 1, p. 1. [Google Scholar]
- Young, J.; Inlow, S.; Bender, B. Solving thermal control challenges for CubeSats: Optimizing passive thermal design. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Li, J.; Post, M.; Wright, T.; Lee, R. Design of Attitude Control Systems for CubeSat-Class Nanosatellite. J. Control Sci. Eng. 2013, 2013, 657182. [Google Scholar] [CrossRef]
- Wang, Y.S.; Teng, H.F.; Shi, Y.J. Cooperative co-evolutionary scatter search for satellite module layout design. Eng. Comput. 2009, 26, 761–785. [Google Scholar] [CrossRef]
- Feng, E.; Wang, X.; Wang, X.; Teng, H. An algorithm of global optimization for solving layout problems. Eur. J. Oper. Res. 1999, 114, 430–436. [Google Scholar] [CrossRef]
- Che, C.; Teng, H.; Wang, Y. Constrained circles packing test problems: All the optimal solutions known. Int. J. Comput. Math. 2010, 87, 2887–2902. [Google Scholar] [CrossRef]
- Teng, H.f.; Chen, Y.; Zeng, W.; Shi, Y.j.; Hu, Q.h. A dual-system variable-grain cooperative coevolutionary algorithm: Satellite-module layout design. IEEE Trans. Evol. Comput. 2009, 14, 438–455. [Google Scholar] [CrossRef]
- Xiao, R.B.; Xu, Y.C.; Amos, M. Two hybrid compaction algorithms for the layout optimization problem. BioSystems 2007, 90, 560–567. [Google Scholar] [CrossRef]
- Xu, Z.Z.; Zhong, C.Q.; Teng, H.F. Assignment and layout integration optimization for simplified satellite re-entry module component layout. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4287–4301. [Google Scholar] [CrossRef]
- Huo, J.Z.; Teng, H.F.; Sun, W.; Chen, J. Human-computer co-operative co-evolutionary method and its application to a satellite module layout design problem. Aeronaut. J. 2010, 114, 209–223. [Google Scholar] [CrossRef]
- Chen, X.; Liu, S.; Sheng, T.; Zhao, Y.; Yao, W. The satellite layout optimization design approach for minimizing the residual magnetic flux density of micro-and nano-satellites. Acta Astronaut. 2019, 163, 299–306. [Google Scholar] [CrossRef]
- Li, Z.; Zeng, Y.; Wang, Y.; Wang, L.; Song, B. A hybrid multi-mechanism optimization approach for the payload packing design of a satellite module. Appl. Soft Comput. 2016, 45, 11–26. [Google Scholar] [CrossRef]
- Chen, X.; Yao, W.; Zhao, Y.; Chen, X.; Zheng, X. A practical satellite layout optimization design approach based on enhanced finite-circle method. Struct. Multidiscip. Optim. 2018, 58, 2635–2653. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, J.; Liu, Y.; Wang, Z.; Feng, Y.; Li, H. Component assignment and layout optimization for multi-module microsatellite considering variable module size. Acta Astronaut. 2022, 198, 36–44. [Google Scholar] [CrossRef]
- Cuco, A.P.C.; de Sousa, F.L.; Silva Neto, A.J. A multi-objective methodology for spacecraft equipment layouts. Optim. Eng. 2015, 16, 165–181. [Google Scholar] [CrossRef]
- Xu, Z.Z.; Jiang, F.; Zhong, C.Q.; Gou, Y.J.; Teng, H.F. Multi-objective layout optimization for an orbital propellant depot. Struct. Multidiscip. Optim. 2020, 61, 207–223. [Google Scholar] [CrossRef]
- Yan’gang, L.; Zheng, Q. A decision support system for satellite layout integrating multi-objective optimization and multi-attribute decision making. J. Syst. Eng. Electron. 2019, 30, 535–544. [Google Scholar]
- Fakoor, M.; Ghoreishi, S.M.N.; Sabaghzadeh, H. Spacecraft component adaptive layout environment (SCALE): An efficient optimization tool. Adv. Space Res. 2016, 58, 1654–1670. [Google Scholar] [CrossRef]
- Zhang, Z.; Han, Q.; Li, Y.; Wang, Y.; Shi, Y. An evolutionary multiagent framework for multiobjective optimization. Math. Probl. Eng. 2020, 2020, 9147649. [Google Scholar] [CrossRef]
- Zheng, Q.; YanGang, L. Multiobjective methodology for satellite cabin layout optimization considering space debris impact risk. J. Spacecr. Rocket. 2018, 55, 232–235. [Google Scholar] [CrossRef]
- Feo, T.A.; Resende, M.G. Greedy randomized adaptive search procedures. J. Glob. Optim. 1995, 6, 109–133. [Google Scholar] [CrossRef]
- Emmerich, M.T.; Deutz, A.H. A tutorial on multiobjective optimization: Fundamentals and evolutionary methods. Natural computing. 2018, 17, 585–609. [Google Scholar] [CrossRef] [PubMed]

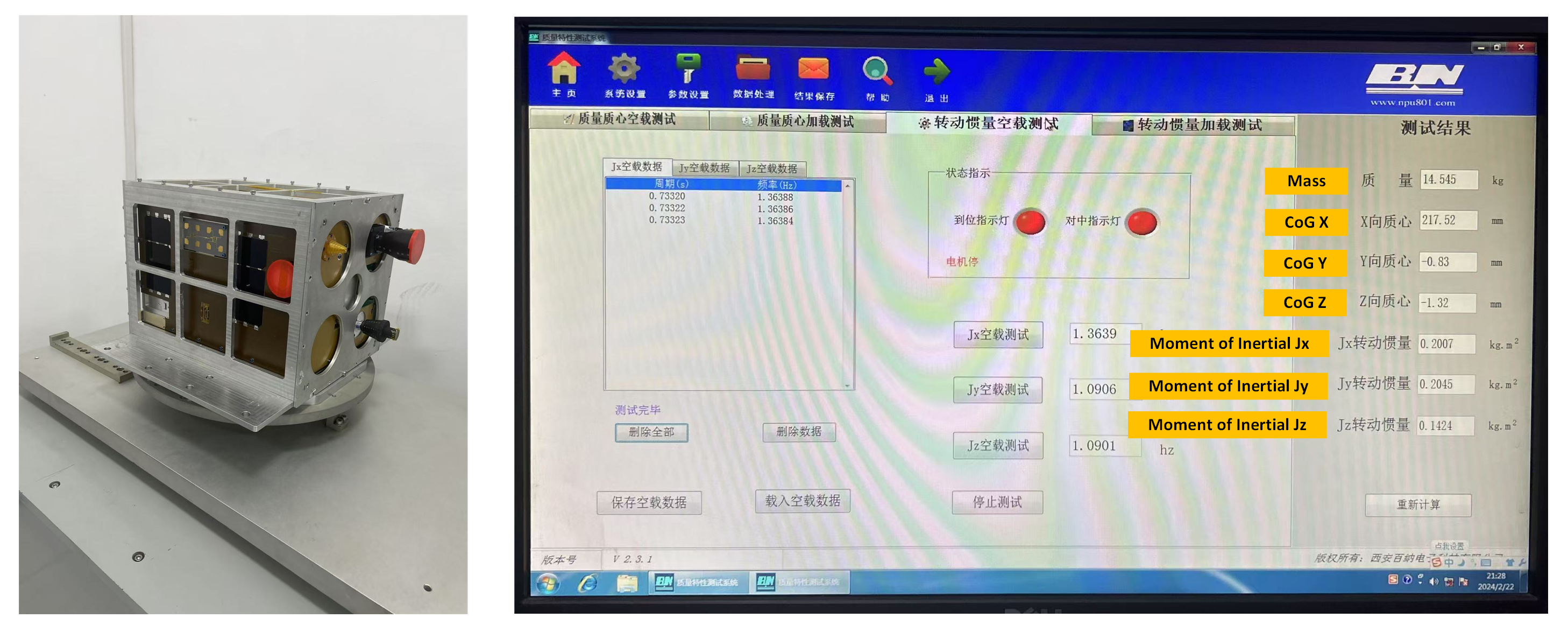
| Parameter | Value |
|---|---|
| 3.576 kg | |
| (103.78, 104.71, 148.07) mm | |
| 158,857.62 kg·mm2 | |
| 157,233.84 kg·mm2 | |
| 114,844.09 kg·mm2 | |
| Envelope (X × Y × Z) | 206.3 × 216.3 × 328.5 mm |
| Extended volume length | mm |
| Name | Shape | Dimensions (mm) | Mass (kg) | Power (W) | Surfaces | Adjustable |
|---|---|---|---|---|---|---|
| Payload Sensor | box | (32, 16, 75) | 0.02 | 0.1 | bottom | none |
| Star Sensor Z | box | (50, 48, 89.8) | 0.1 | 1.276 | bottom | none |
| Small Camera | box | (54, 54, 84.8) | 0.122 | 1.5 | bottom | none |
| Big Camera cabin | box | (104, 93, 17.7) | 1 | 0 | top | none |
| Big Camera lens | cylinder | (95, 95, 139) | 2.5 | 4 | top | none |
| Star Sensor Y | box | (55, 60, 71.9) | 0.011 | 1.276 | front | x, y, z, , l, w, h |
| X Antenna | cylinder | (17, 17, 37.5) | 0.034 | 0 | bottom | none |
| UHF Antenna-1 | box | (40, 133, 21.5) | 0.038 | 0 | right | none |
| UHF Antenna-2 | box | (40, 133, 21.5) | 0.038 | 0 | left | none |
| VHF Antenna-1 | box | (40, 133, 21.5) | 0.038 | 0 | back | none |
| VHF Antenna-2 | box | (40, 133, 21.5) | 0.038 | 0 | front | none |
| Guide 1 | box | (154, 133, 6) | 0.01 | 0 | left | none |
| Guide 2 | box | (144, 133, 6) | 0.01 | 0 | front | none |
| Guide 3 | box | (154, 133, 6) | 0.01 | 0 | right | none |
| Guide 4 | box | (144, 133, 6) | 0.01 | 0 | back | none |
| GPS Antenna | box | (69.4, 69.4, 9) | 0.034 | 0 | bottom | x, y, z, , l, w, h |
| Gyroscope | box | (50, 50, 69) | 0.185 | 2.5 | all surfaces | x, y, z, , l, w, h |
| PC104 Assembly | box | (183.4, 95.3, 100.3) | 1.745 | 13 | front, back, left, right | x, y, z, , l, w, h |
| Payload PCB | box | (102.7, 109.8, 8) | 0.058 | 0.4 | all surfaces | x, y, z, , l, w, h |
| Storage Board | box | (15.2, 152.8, 101.7) | 0.188 | 10 | all surfaces | x, y, z, , l, w, h |
| Battery | box | (55, 74.2, 90) | 0.78 | 1 | all surfaces | x, y, z, , l, w, h |
| Sun Sensor | box | (59.3, 37, 15) | 0.041 | 0 | back | x, y, z, , l, w, h |
| MEMS Gyroscope | box | (22.4, 22.4, 9) | 0.007 | 0.187 | front, back, left, right | x, y, z, , l, w, h |
| Deorbiting Ball | box | (120, 54.5, 43.6) | 0.5 | 0.055 | bottom | x, y, z, , l, w, h |
| Flywheel X | box | (61, 61, 36.9) | 0.237 | 0 | left | x, y, z, , l, w, h |
| Flywheel Y | box | (61, 61, 36.9) | 0.237 | 0.758 | back | x, y, z, , l, w, h |
| Flywheel Z | box | (72, 55, 65) | 0.265 | 0.758 | back | x, y, z, , l, w, h |
| Flywheel S | box | (86, 71.5, 73.1) | 0.265 | 0.758 | left | x, y, z, , l, w, h |
| Magnetometer | box | (85.1, 30.5, 10.5) | 0.01 | 0.451 | all surfaces | x, y, z, , l, w, h |
| ID | ID | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −9.7596 | 7.304 | 2.3169 | 4.838 | −3195.27 | 29 | −9.4153 | 8.861 | 2.3078 | 5.090 | −3236.52 |
| 2 | −9.7223 | 5.022 | 2.3770 | 4.846 | −2792.82 | 30 | −9.4077 | 2.436 | 2.5279 | 6.785 | −3480.76 |
| 3 | −9.6961 | 4.248 | 2.4118 | 4.010 | −2680.27 | 31 | −9.4031 | 7.200 | 2.3160 | 4.282 | −2752.58 |
| 4 | −9.6944 | 8.375 | 2.5496 | 4.281 | −3279.94 | 32 | −9.3911 | 6.824 | 2.3334 | 4.282 | −2747.88 |
| 5 | −9.6846 | 4.460 | 2.3643 | 4.846 | −2786.67 | 33 | −9.3819 | 4.012 | 2.3914 | 4.846 | −2711.07 |
| 6 | −9.6715 | 4.368 | 2.3618 | 4.846 | −2686.24 | 34 | −9.3758 | 2.281 | 2.5237 | 6.785 | −3491.69 |
| 7 | −9.6609 | 7.823 | 2.3265 | 4.838 | −3200.23 | 35 | −9.3744 | 12.817 | 2.3114 | 6.618 | −3631.56 |
| 8 | −9.6527 | 4.879 | 2.3865 | 4.846 | −2787.07 | 36 | −9.3595 | 9.577 | 2.3208 | 3.263 | −3272.56 |
| 9 | −9.6401 | 7.686 | 2.5642 | 4.337 | −3313.41 | 37 | −9.3447 | 8.731 | 2.3296 | 5.090 | −3280.15 |
| 10 | −9.6307 | 5.474 | 2.3464 | 4.846 | −2707.98 | 38 | −9.3364 | 2.183 | 2.5318 | 6.785 | −3502.03 |
| 11 | −9.6242 | 7.210 | 2.5722 | 4.337 | −3325.42 | 39 | −9.3336 | 6.323 | 2.3144 | 4.846 | −2756.46 |
| 12 | −9.6167 | 3.998 | 2.3721 | 4.846 | −2699.42 | 40 | −9.3236 | 8.963 | 2.3136 | 5.090 | −3264.61 |
| 13 | −9.6064 | 8.374 | 2.3049 | 4.838 | −3180.05 | 41 | −9.3192 | 5.762 | 2.4300 | 4.256 | −2862.58 |
| 14 | −9.5853 | 8.186 | 2.3082 | 4.838 | −3170.58 | 42 | −9.3095 | 9.360 | 2.3113 | 4.962 | −3232.08 |
| 15 | −9.5769 | 4.687 | 2.3765 | 4.846 | −2791.73 | 43 | −9.3015 | 6.719 | 2.4117 | 4.236 | −2841.13 |
| 16 | −9.5683 | 2.070 | 2.5148 | 6.785 | −3457.78 | 44 | −9.2869 | 3.689 | 2.4958 | 6.829 | −3552.82 |
| 17 | −9.5663 | 6.699 | 2.3185 | 4.846 | −2759.28 | 45 | −9.2843 | 6.382 | 2.3237 | 4.282 | −2755.48 |
| 18 | −9.5443 | 7.393 | 2.3048 | 7.160 | −2744.10 | 46 | −9.2795 | 6.395 | 2.4206 | 4.236 | −2993.20 |
| 19 | −9.5263 | 7.392 | 2.2825 | 7.160 | −2750.36 | 47 | −9.2644 | 9.411 | 2.3186 | 3.263 | −3297.64 |
| 20 | −9.5164 | 1.721 | 2.5042 | 6.785 | −3448.15 | 48 | −9.2516 | 12.155 | 2.3287 | 6.618 | −3642.95 |
| 21 | −9.5131 | 8.308 | 2.3190 | 5.090 | −3219.11 | 49 | −9.2389 | 8.982 | 2.3577 | 4.250 | −3030.15 |
| 22 | −9.5021 | 7.139 | 2.3092 | 4.282 | −2742.84 | 50 | −9.2295 | 4.276 | 2.4954 | 6.829 | −3479.01 |
| 23 | −9.4866 | 8.343 | 2.5621 | 4.281 | −3287.54 | 51 | −9.2275 | 6.187 | 2.3228 | 4.282 | −2736.81 |
| 24 | −9.4774 | 3.974 | 2.3806 | 4.846 | −2703.95 | 52 | −9.2119 | 6.493 | 2.3218 | 4.785 | −2799.13 |
| 25 | −9.4608 | 4.144 | 2.3808 | 4.846 | −2714.54 | 53 | −9.2020 | 9.680 | 2.3044 | 5.090 | −3229.01 |
| 26 | −9.4406 | 6.693 | 2.3239 | 4.846 | −2751.81 | 54 | −9.1838 | 9.966 | 2.3080 | 5.090 | −3242.81 |
| 27 | −9.4294 | 1.906 | 2.5149 | 6.785 | −3469.58 | 55 | −9.1666 | 6.558 | 2.3117 | 4.282 | −2745.57 |
| 28 | −9.4268 | 6.325 | 2.3016 | 4.282 | −2742.82 | 56 | −9.1243 | 9.887 | 2.3106 | 5.090 | −3237.34 |
| Component | Surface | x (mm) | y (mm) | z (mm) | (°) | Scales |
|---|---|---|---|---|---|---|
| Payload Sensor | bottom | 169.3 | 201.3 | −33.5 | 0 | [1, 1, 1] |
| Star Sensor Z | bottom | 170.3 | 168.8 | −20.9 | 0 | [1, 1, 1] |
| Small Camera | bottom | 36.5 | 174.8 | −32.4 | 0 | [1, 1, 1] |
| Big Camera cabin | top | 103.15 | 106.09 | 180.64 | 0 | [1, 1, 1] |
| Big Camera lens | top | 103.15 | 108.15 | 259.0 | – | [1, 1] |
| Star Sensor Y | front | 50.0 | 35.95 | 46.13 | 90 | [0.95, 1, 1] |
| X Antenna | bottom | 177.3 | 30.0 | −18.75 | – | [1, 1] |
| UHF Antenna 1 | right | 195.55 | 196.3 | 256.0 | 0 | [1, 1, 1] |
| UHF Antenna 2 | left | 10.75 | 20.0 | 256.0 | 0 | [1, 1, 1] |
| VHF Antenna 1 | back | 20.0 | 205.55 | 256.0 | 0 | [1, 1, 1] |
| VHF Antenna 2 | front | 186.3 | 10.75 | 256.0 | 0 | [1, 1, 1] |
| Guide 1 | left | 3.0 | 117.8 | 256.0 | 0 | [1, 1, 1] |
| Guide 2 | front | 93.5 | 3.0 | 256.0 | 0 | [1, 1, 1] |
| Guide 3 | right | 203.3 | 98.5 | 256.0 | 0 | [1, 1, 1] |
| Guide 4 | back | 112.8 | 213.3 | 256.0 | 0 | [1, 1, 1] |
| GPS Antenna | bottom | 111.23 | 172.97 | 4.95 | 90 | [0.95, 0.9, 1.1] |
| Gyroscope | bottom | 66.25 | 102.50 | 31.05 | 0 | [1.05, 0.9, 0.9] |
| PC104 Assembly | front | 100.85 | 50.14 | 125.25 | 0 | [1.1, 0.95, 1] |
| Payload PCB | back | 48.78 | 212.70 | 132.16 | 0 | [0.95, 0.95, 0.9] |
| Storage Board | right | 150.37 | 127.22 | 84.04 | 0 | [0.95, 1.1, 1.1] |
| Battery | back | 133.40 | 175.80 | 144.75 | 90 | [0.9, 0.9, 0.9] |
| Sun Sensor | back | 176.65 | 208.80 | 46.69 | 90 | [0.9, 0.9, 1] |
| MEMS Gyroscope | back | 110.64 | 212.25 | 12.32 | 0 | [0.95, 1.1, 0.9] |
| Deorbiting Ball | bottom | 137.00 | 45.91 | 20.73 | 0 | [0.95, 0.95, 0.95] |
| Flywheel X | left | 18.45 | 187.45 | 48.98 | 90 | [0.95, 0.9, 1] |
| Flywheel Y | back | 68.98 | 196.93 | 48.98 | 0 | [0.95, 0.95, 1.05] |
| Flywheel Z | back | 124.75 | 183.80 | 77.80 | 90 | [1.05, 0.9, 1] |
| Flywheel S | left | 40.21 | 152.18 | 125.15 | 90 | [1.05, 0.9, 1.1] |
| Magnetometer | bottom | 56.78 | 38.30 | 4.99 | 90 | [0.9, 1.1, 0.95] |
| Name | Face | x (mm) | y (mm) | z (mm) | (deg) |
|---|---|---|---|---|---|
| Payload Sensor | bottom | 169.30 | 201.30 | −33.50 | 0 |
| Star Sensor Z | bottom | 170.30 | 168.80 | −20.90 | 0 |
| Small Camera | bottom | 36.50 | 174.80 | −32.40 | 0 |
| Big Camera cabin | top | 103.15 | 106.09 | 180.64 | 0 |
| Big Camera lens | top | 103.15 | 108.15 | 259.00 | – |
| Star Sensor Y | front | 136.80 | 37.57 | 32.00 | 0 |
| X Antenna | bottom | 177.30 | 30.00 | −18.75 | – |
| UHF Antenna 1 | right | 195.55 | 196.30 | 297.55 | 0 |
| UHF Antenna 2 | left | 10.75 | 20.00 | 297.55 | 0 |
| VHF Antenna 1 | back | 20.00 | 205.55 | 297.55 | 0 |
| VHF Antenna 2 | front | 186.30 | 10.75 | 297.55 | 0 |
| GPS Antenna | bottom | 98.80 | 172.65 | 4.50 | 0 |
| Gyroscope | front | 75.50 | 35.20 | 34.50 | 0 |
| PC104 Assembly | right | 151.15 | 103.05 | 117.60 | 0 |
| Payload PCB | left | 5.00 | 56.85 | 95.90 | 0 |
| Storage Board | front | 19.80 | 51.85 | 94.90 | 0 |
| Battery | front | 65.00 | 50.50 | 102.83 | 0 |
| Sun Sensor | back | 40.15 | 208.80 | 115.00 | 0 |
| MEMS Gyroscope | right | 201.80 | 156.55 | 48.80 | 0 |
| Deorbiting Ball | bottom | 109.15 | 106.15 | 27.00 | 0 |
| Flywheel X | left | 18.45 | 142.65 | 62.00 | 0 |
| Flywheel Y | back | 32.00 | 197.85 | 62.00 | 0 |
| Flywheel Z | back | 104.80 | 183.80 | 37.00 | 0 |
| Flywheel S | left | 36.55 | 158.00 | 135.25 | 0 |
| Magnetometer | left | 5.25 | 70.80 | 169.80 | 0 |
| Name | Shape | Dimensions (mm) | Mass (kg) | Power (W) | Surfaces | Adjustable |
|---|---|---|---|---|---|---|
| Payload Sensor | box | (32, 16, 75) | 0.02 | 0.1 | bottom | none |
| Star Sensor Z | box | (50, 48, 89.8) | 0.1 | 1.276 | bottom | none |
| Small Camera | box | (54, 54, 84.8) | 0.122 | 1.50 | bottom | none |
| Big Camera cabin | box | (104, 93, 17.7) | 1 | 0 | top | none |
| Big Camera lens | cylinder | (95, 95, 139) | 2.500 | 4 | top | none |
| Star Sensor Y | box | (55, 60, 71.9) | 0.011 | 1.276 | front | x, y, z, , l, w, h |
| X Antenna | cylinder | (17, 17, 37.5) | 0.034 | 0 | bottom | none |
| UHF Antenna 1 | box | (40, 133, 21.5) | 0.038 | 0 | right | none |
| UHF Antenna 2 | box | (40, 133, 21.5) | 0.038 | 0 | left | none |
| VHF Antenna 1 | box | (40, 133, 21.5) | 0.038 | 0 | back | none |
| VHF Antenna 2 | box | (40, 133, 21.5) | 0.038 | 0 | front | none |
| Guide 1 | box | (154, 133, 6) | 0.01 | 0 | left | none |
| Guide 2 | box | (144, 133, 6) | 0.01 | 0 | front | none |
| Guide 3 | box | (154, 133, 6) | 0.01 | 0 | right | none |
| Guide 4 | box | (144, 133, 6) | 0.01 | 0 | back | none |
| GPS Antenna | box | (69.4, 69.4, 9) | 0.034 | 0 | bottom | x, y, z, , l, w, h |
| Gyroscope | box | (50, 50, 69) | 0.185 | 2.5 | all surfaces | x, y, z, |
| PC104 Assembly | box | (183.4, 95.3, 100.3) | 1.745 | 13 | front, back, left, right | x, y, z, , l, w, h |
| Payload PCB | box | (102.7, 109.8, 8) | 0.058 | 0.4 | all surfaces | x, y, z, , l, w, h |
| Storage Board | box | (15.2, 152.8, 101.7) | 0.188 | 10 | all surfaces | x, y, z, , l, w, h |
| Battery | box | (55, 74.2, 90) | 0.780 | 1 | all surfaces | x, y, z, , l, w, h |
| Sun Sensor | box | (59.3, 37, 15) | 0.041 | 0 | back | x, y, z, , l, w, h |
| MEMS Gyroscope | box | (22.4, 22.4, 9) | 0.007 | 0.187 | front, back, left, right | x, y, z, |
| Deorbiting Ball | box | (120, 54.5, 43.6) | 0.5 | 0.055 | bottom | x, y, z, , l, w, h |
| Flywheel X | box | (61, 61, 36.9) | 0.237 | 0 | left | x, y, z, |
| Flywheel Y | box | (61, 61, 36.9) | 0.237 | 0.758 | back | x, y, z, |
| Flywheel Z | box | (72, 55, 65) | 0.265 | 0.758 | back | x, y, z, |
| Flywheel S | box | (86, 71.5, 73.1) | 0.265 | 0.758 | left | x, y, z, |
| Magnetometer | box | (85.1, 30.5, 10.5) | 0.010 | 0.451 | all surfaces | x, y, z, |
| ID | |||||
|---|---|---|---|---|---|
| 1 | −1.0176 | 0.665 | 2.4266 | 3.562 | −3024.64 |
| 2 | −1.0164 | 0.554 | 2.4186 | 3.562 | −3049.77 |
| 3 | −1.0125 | 1.010 | 2.4388 | 3.724 | −3086.16 |
| 4 | −1.0110 | 0.696 | 2.4208 | 3.724 | −3083.50 |
| Component | Surface | x (mm) | y (mm) | z (mm) | (deg) | Scales |
|---|---|---|---|---|---|---|
| Payload Sensor | bottom | 169.3 | 201.3 | −33.5 | 0 | [1,1,1] |
| Star Sensor Z | bottom | 170.3 | 168.8 | −20.9 | 0 | [1, 1, 1] |
| Small Camera | bottom | 36.5 | 174.8 | −32.4 | 0 | [1, 1, 1] |
| Big Camera cabin | top | 103.15 | 106.09 | 180.64 | 0 | [1, 1, 1] |
| Big Camera lens | top | 103.15 | 108.15 | 259 | – | [1, 1] |
| Star Sensor Y | front | 136.8 | 37.566 | 32.0 | 0 | [1, 1, 1] |
| X Antenna | bottom | 177.3 | 30 | −18.75 | – | [1, 1] |
| UHF Antenna 1 | right | 195.55 | 196.3 | 256 | 0 | [1, 1, 1] |
| UHF Antenna 2 | left | 10.75 | 20 | 256 | 0 | [1, 1, 1] |
| VHF Antenna 1 | back | 20 | 205.55 | 256 | 0 | [1, 1, 1] |
| VHF Antenna 2 | front | 186.3 | 10.75 | 256 | 0 | [1, 1, 1] |
| Guide 1 | left | 3 | 117.8 | 256 | 0 | [1, 1, 1] |
| Guide 2 | front | 93.5 | 3 | 256 | 0 | [1, 1, 1] |
| Guide 3 | right | 203.3 | 98.5 | 256 | 0 | [1, 1, 1] |
| Guide 4 | back | 112.8 | 213.3 | 256 | 0 | [1, 1, 1] |
| GPS Antenna | bottom | 98.8 | 172.65 | 4.5 | 0 | [1, 1, 1] |
| Gyroscope | front | 75 | 34.5 | 35 | 90 | [1, 1, 1] |
| PC104 Assembly | right | 151.15 | 103.52 | 118.589 | 0 | [1.02, 1.02, 1.2] |
| Payload PCB | left | 5 | 56.85 | 95.9 | 0 | [1, 1, 1] |
| Storage Board | back | 19.8 | 51.85 | 94.9 | 0 | [1, 1, 1] |
| Battery | front | 67.5 | 49.5 | 100.825 | 0 | [1.1, 1.1, 1.1] |
| Sun Sensor | back | 40.15 | 208.8 | 115 | 0 | [1, 1, 1] |
| MEMS Gyroscope | right | 201.8 | 161.2 | 41.2 | 0 | [1, 1, 1] |
| Deorbiting Ball | bottom | 110 | 107.273 | 23.564 | 0 | [1, 1, 1.08] |
| Flywheel X | left | 18.45 | 140.5 | 60.5 | 90 | [1, 1, 1] |
| Flywheel Y | back | 30.5 | 197.85 | 60.5 | 90 | [1, 1, 1] |
| Flywheel Z | back | 106 | 183.8 | 37.5 | 0 | [1, 1, 1] |
| Flywheel S | left | 36.55 | 153 | 135.75 | 0 | [1, 1, 1] |
| Magnetometer | left | 5.25 | 52.55 | 25.25 | 0 | [1, 1, 1] |
| Name | Face | x (mm) | y (mm) | z (mm) | (deg) |
|---|---|---|---|---|---|
| Payload Sensor | bottom | 169.30 | 201.30 | −33.50 | 0 |
| Star Sensor Z | bottom | 170.30 | 168.80 | −20.90 | 0 |
| Small Camera | bottom | 36.50 | 174.80 | −32.40 | 0 |
| Big Camera cabin | none | 103.15 | 106.09 | 180.64 | 0 |
| Big Camera lens | top | 103.15 | 108.15 | 259.00 | – |
| Star Sensor Y | front | 136.80 | 37.57 | 32.00 | 0 |
| X Antenna | bottom | 177.30 | 30.00 | −18.75 | – |
| UHF Antenna 1 | right | 195.55 | 196.30 | 297.55 | 0 |
| UHF Antenna 2 | left | 10.75 | 20.00 | 297.55 | 0 |
| VHF Antenna 1 | back | 20.00 | 205.55 | 297.55 | 0 |
| VHF Antenna 2 | front | 186.30 | 10.75 | 297.55 | 0 |
| GPS Antenna | bottom | 98.80 | 172.65 | 4.50 | 0 |
| Gyroscope | front | 75.50 | 35.20 | 34.50 | 0 |
| PC104 Assembly | right | 151.15 | 103.05 | 117.60 | 0 |
| Payload PCB | left | 5.00 | 56.85 | 95.90 | 0 |
| Storage Board | front | 19.80 | 51.85 | 94.90 | 0 |
| Battery | front | 65.00 | 50.50 | 102.83 | 0 |
| Sun Sensor | back | 40.15 | 208.80 | 115.00 | 0 |
| MEMS Gyroscope | right | 201.80 | 156.55 | 48.80 | 0 |
| Deorbiting Ball | bottom | 109.15 | 106.15 | 27.00 | 0 |
| Flywheel X | left | 18.45 | 142.65 | 62.00 | 0 |
| Flywheel Y | back | 32.00 | 197.85 | 62.00 | 0 |
| Flywheel Z | back | 104.80 | 183.80 | 37.00 | 0 |
| Flywheel S | left | 36.55 | 158.00 | 135.25 | 0 |
| Magnetometer | left | 5.25 | 70.80 | 169.80 | 0 |
| Name | Shape | Dimensions (mm) | Mass (kg) | Power (W) | Surfaces | Adjustable |
|---|---|---|---|---|---|---|
| Payload Sensor | box | (32, 16, 75) | 0.02 | 0.10 | bottom | none |
| Star Sensor Z | box | (50, 48, 89.8) | 0.10 | 1.276 | bottom | none |
| Small Camera | box | (54, 54, 84.8) | 0.122 | 1.50 | bottom | none |
| Big Camera cabin | box | (104, 93, 17.7) | 1.00 | 0 | top | none |
| Big Camera lens | cylinder | (95, 95, 139) | 2.50 | 4 | top | none |
| Star Sensor Y | box | (55, 60, 71.9) | 0.011 | 1.276 | front | x, y, z, , l, w, h |
| X Antenna | cylinder | (17, 17, 37.5) | 0.034 | 0 | bottom | none |
| UHF Antenna 1 | box | (40, 133, 21.5) | 0.038 | 0 | right | none |
| UHF Antenna 2 | box | (40, 133, 21.5) | 0.038 | 0 | left | none |
| VHF Antenna 1 | box | (40, 133, 21.5) | 0.038 | 0 | back | none |
| VHF Antenna 2 | box | (40, 133, 21.5) | 0.038 | 0 | front | none |
| Guide 1 | box | (154, 133, 6) | 0.01 | 0 | left | none |
| Guide 2 | box | (144, 133, 6) | 0.01 | 0 | front | none |
| Guide 3 | box | (154, 133, 6) | 0.01 | 0 | right | none |
| Guide 4 | box | (144, 133, 6) | 0.01 | 0 | back | none |
| GPS Antenna | box | (69.4, 69.4, 9) | 0.034 | 0 | bottom | x, y, z, , l, w, h |
| Gyroscope | box | (50, 50, 69) | 0.185 | 2.5 | all surfaces | x, y, z, |
| PC104 Assembly | box | (201.7, 104.8, 110.3) | 1.745 | 13 | front, back, left, right | x, y, z, , l, w, h |
| Payload PCB | box | (102.7, 109.8, 8) | 0.058 | 0.4 | all surfaces | x, y, z, |
| Storage Board | box | (15.2, 152.8, 101.7) | 0.188 | 10 | all surfaces | x, y, z, |
| Battery | box | (60.5, 81.65, 99) | 0.780 | 1 | all surfaces | x, y, z, , l, w, h |
| Sun Sensor | box | (59.3, 37, 15) | 0.041 | 0 | back | none |
| MEMS Gyroscope | box | (22.4, 22.4, 9) | 0.007 | 0.187 | front, back, left, right | x, y, z, |
| Deorbiting Ball | box | (132, 60, 48) | 0.500 | 0.055 | bottom | none |
| Flywheel X | box | (61, 61, 36.9) | 0.237 | 0 | left | x, y, z, |
| Flywheel Y | box | (61, 61, 36.9) | 0.237 | 0.758 | back | x, y, z, |
| Flywheel Z | box | (72, 55, 65) | 0.265 | 0.758 | back | x, y, z, |
| Flywheel S | box | (86, 71.5, 73.1) | 0.265 | 0.758 | left | x, y, z, |
| Magnetometer | box | (85.1, 30.5, 10.5) | 0.010 | 0.451 | all surfaces | x, y, z, |
| ID | |||||
|---|---|---|---|---|---|
| 1 | −1.0637 | 0.278 | 2.4370 | 4.642 | −2946.12 |
| Component | Surface | x (mm) | y (mm) | z (mm) | (deg) | Scales |
|---|---|---|---|---|---|---|
| Payload Sensor | bottom | 169.3 | 201.3 | −33.5 | 0 | [1,1,1] |
| Star Sensor Z | bottom | 170.3 | 168.8 | −20.9 | 0 | [1, 1, 1] |
| Small Camera | bottom | 36.5 | 174.8 | −32.4 | 0 | [1, 1, 1] |
| Big Camera cabin | top | 103.15 | 106.09 | 180.64 | 0 | [1, 1, 1] |
| Big Camera lens | top | 103.15 | 108.15 | 259 | – | [1, 1] |
| Star Sensor Y | front | 136.8 | 37.566 | 32.0 | 0 | [1, 1, 1] |
| X Antenna | bottom | 177.3 | 30 | −18.75 | – | [1, 1] |
| UHF Antenna 1 | right | 195.55 | 196.3 | 256 | 0 | [1, 1, 1] |
| UHF Antenna 2 | left | 10.75 | 20 | 256 | 0 | [1, 1, 1] |
| VHF Antenna 1 | back | 20.0 | 205.55 | 256 | 0 | [1, 1, 1] |
| VHF Antenna 2 | front | 186.3 | 10.75 | 256 | 0 | [1, 1, 1] |
| GPS Antenna | bottom | 98.8 | 172.65 | 4.5 | 0 | [1, 1, 1] |
| Gyroscope | front | 75.0 | 34.5 | 35.0 | 0 | [1, 1, 1] |
| PC104 Assembly | right | 151.15 | 100.85 | 117.40 | 0 | [1, 1, 1] |
| Payload PCB | left | 4.0 | 56.35 | 94.9 | 0 | [1, 1, 1] |
| Storage Board | front | 17.6 | 50.85 | 96.4 | 0 | [1, 1, 1] |
| Battery | front | 65.25 | 49.5 | 102.458 | 0 | [1, 1.04, 1.02] |
| Sun Sensor | back | 40.15 | 208.8 | 115.0 | 0 | [1, 1, 1] |
| MEMS Gyroscope | right | 201.8 | 156.2 | 51.2 | 0 | [1, 1, 1] |
| Deorbiting Ball | bottom | 109.15 | 106.15 | 27.0 | 0 | [1, 1, 1] |
| Flywheel X | left | 18.45 | 140.5 | 60.5 | 0 | [1, 1, 1] |
| Flywheel Y | back | 30.5 | 197.85 | 60.5 | 0 | [1, 1, 1] |
| Flywheel Z | back | 106.0 | 183.8 | 37.5 | 0 | [1, 1, 1] |
| Flywheel S | left | 36.55 | 158.0 | 135.75 | 0 | [1, 1, 1] |
| Guide 1 | left | 3.0 | 117.8 | 256.0 | 0 | [1, 1, 1] |
| Guide 2 | front | 93.5 | 3.0 | 256.0 | 0 | [1, 1, 1] |
| Guide 3 | right | 203.3 | 98.5 | 256.0 | 0 | [1, 1, 1] |
| Guide 4 | back | 112.8 | 213.3 | 256.0 | 0 | [1, 1, 1] |
| Magnetometer | back | 42.55 | 211.05 | 170.25 | 0 | [1, 1, 1] |
| Subsystem | Min. Temp (°C) | Max. Temp (°C) | Nominal Range (°C) |
|---|---|---|---|
| PC104 Assembly | 14 | 28 | −10 to 45 |
| Gyroscope | 6 | 15 | −15 to 45 |
| Flywheel X | 18 | 24 | −15 to 45 |
| Flywheel Y | 9 | 17 | −15 to 45 |
| Flywheel Z | 17 | 25 | −15 to 45 |
| Flywheel S | 11 | 18 | −15 to 45 |
| Big Camera cabin | 8 | 16 | −15 to 45 |
| Battery | 9 | 16 | 0 to 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Liu, Z.; Luo, L.; Zhao, C.; Li, H. Engineering-Oriented Layout Optimization and Trade-Off Design of a 12U CubeSat with In-Orbit Validation. Aerospace 2025, 12, 506. https://doi.org/10.3390/aerospace12060506
Zhang J, Liu Z, Luo L, Zhao C, Li H. Engineering-Oriented Layout Optimization and Trade-Off Design of a 12U CubeSat with In-Orbit Validation. Aerospace. 2025; 12(6):506. https://doi.org/10.3390/aerospace12060506
Chicago/Turabian StyleZhang, Jiyao, Zhenqian Liu, Liwei Luo, Chunqiu Zhao, and Huayi Li. 2025. "Engineering-Oriented Layout Optimization and Trade-Off Design of a 12U CubeSat with In-Orbit Validation" Aerospace 12, no. 6: 506. https://doi.org/10.3390/aerospace12060506
APA StyleZhang, J., Liu, Z., Luo, L., Zhao, C., & Li, H. (2025). Engineering-Oriented Layout Optimization and Trade-Off Design of a 12U CubeSat with In-Orbit Validation. Aerospace, 12(6), 506. https://doi.org/10.3390/aerospace12060506